HAL Id: pastel-00001791
https://pastel.archives-ouvertes.fr/pastel-00001791
Submitted on 30 Jun 2006HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
multi-capteur utilisant les corrélateurs cinq-ports pour
la mesure de propagation à l’intérieur des bâtiments
van Yem Vu
To cite this version:
van Yem Vu. Conception et réalisation d’un sondeur de canal multi-capteur utilisant les corréla-teurs cinq-ports pour la mesure de propagation à l’intérieur des bâtiments. domain_other. Télécom ParisTech, 2005. English. �pastel-00001791�
THESE
Présentée pour obtenir le grade de Docteur de l’Ecole Nationale Supérieure des
Télécommunications
Spécialité: Electronique et Communications
VU Van Yem
Conception et réalisation d’un sondeur de canal multi-capteur
utilisant les corrélateurs cinq-ports pour la mesure de
propagation à l’intérieur des bâtiments
Soutenue le 01 décembre 2005 devant le jury composé de:
Alain SIBILLE ENSTA Président
Jean-François DIOURIS IREENA Rapporteur
Bernard UGUEN INSA de Rennes Rapporteur
Patrice PAJUSCO FT R&D à Belfort Examinateur
Bernard HUYART TELECOM Paris Examinateur
Xavier BEGAUD
TELECOM Paris Directeur de thèse
Télécommunications et Électronique de Paris
Remerciements
Dans un premier temps je tiens à remercier Monsieur Jean-Claude BIC, qui reste toujours avec nous, de m’avoir accueilli au sein du département COMELEC (Electronique et Communications) de l’Ecole Nationale Supérieure des Télécommunications, dans un environnement très favorable à la réussite de ces travaux de recherche.
De tout mon cœur, je tiens à remercier vivement mon directeur de thèse Monsieur Xavier BEGAUD, maître de conférences à TELECOM Paris et mon co-directeur de thèse Monsieur Bernard HUYART, professeur à TELECOM Paris, pour m’avoir accordé leur confiance en me confiant ce sujet de thèse. J’ai énormément appris grâce à leurs compétences techniques et à leurs avis toujours sincères, cohérents.
J’exprime ma reconnaissance à Monsieur Alain SIBILLE, professeur à l’ENSTA, pour l’honneur qu’il m’a fait en acceptant de présider le jury. J’exprime également ma profonde reconnaissance à Monsieur Jean-François DIOURIS, professeur à l’Ecole Polytechnique de l’université de Nantes, à Monsieur Bernard UGUEN professeur à l’INSA de Rennes de bien d’avoir voulu accepter d’être rapporteurs pour cette thèse. Je voudrais exprimer ma gratitude à Monsieur Patrice PAJUSCO, directeur technique à France Télécom R&D à Belfort, d’avoir accepté de juger ce travail. J’ai aussi énormément appris grâce à leurs questions.
Ma reconnaissance va aussi à mon cher ami Judson BRAGA thésard dans notre group avec qui j’ai l’occasion de travailler ensemble. Merci pour sa disponibilité, ses connaissances techniques et ses aides. Je voudrais remercier aussi à tous ceux qui m’ont aidé à relire tout ou une partie de ce manuscrit, en particulier Ludovic SCHREIDER, Sara ABOU CHAKRA et Antoine KHY.
Je tiens à remercier tous les membres du département COMELEC de l’ENST, notamment Cédric WARE pour ses soutiens informatiques, Danielle CHILDZ, Marie BAQUERO, Chantal CADIAT, Stéphane BONENFANT ainsi que Florence BESNARD pour leurs aides administratives et leurs gentillesses; Alain CROULLEBOIS pour le support mécanique et Karim pour les circuits imprimés.
Je ne puis évidemment terminer sans adresser mes sincères remerciements à tous les permanents du laboratoire Radio- Fréquences et Micro-ondes de l’ENST : Eric BERGEAULT et Jean-Christophe COUSIN et à tous les thésards et stagiaires du laboratoire de recherche Radio - Fréquences et Micro-ondes : Souheil, Sara, Ludovic, Anne Claire, François, Judson, Fernando, Guillaume, Ghalid, Ihssen, Charif, Akiko, Kaïste, Marbouk etc pour avoir su créer au cours de ces trois ans une ambiance de travail des plus agréable et détendue.
Enfin, je voudrais exprimer ma gratitude au gouvernement Vietnamien et à l’ENST pour l’aide financière qui m’a été accordé durant ces trois ans de thèse et qui m’a bien permis de réussir ces travaux.
Le corrélateur cinq-port en technologie micro ruban composé d’un anneau à cinq branches et de trois détecteurs de puissance permet de calculer précisément le rapport complexe entre deux signaux hyperfréquences à partir des tensions mesurées aux trois sorties et d’un traitement numérique associé. Le cinq-port a un faible coût de réalisation et s’avère être moins sensible aux désappariements de phase et d’amplitude. De plus, il peut fonctionner dans une bande de fréquence large. Nous proposons dans ce travail un sondeur de canal multi-capteur utilisant les corrélateurs cinq-ports pour la mesure de propagation à l’intérieur des bâtiments. Ce sondeur; composé d’un réseau de 8 antennes quasi-Yagi et d’un réseau de 8 cinq-port en réception; permet de mesurer à la fois les retards de propagation et les directions d’arrivée (DDAs) en azimut et en élévation des trajets multiples. La différence de phase des signaux captés par les antennes permet de calculer les DDAs et les retards de propagation sont estimés à partir de la différence de phase des signaux mesurés à deux fréquences consécutives dans chaque cinq-port dans la bande 2.3 GHz à 2.5 GHz avec un pas de 4 MHz. L’algorithme MUSIC (Multiple Signal Classification) associé à un lissage spatial est utilisé pour l’estimation des directions d’arrivée et des retards de propagation. Les résultats de simulation et de mesure montrent que nous pouvons estimer un nombre de sources supérieur au nombre d’antennes. Ce sondeur de canal a un faible coût de réalisation et permet d’effectuer l’acquisition à un instant donné et en une seule fois de l’ensemble des mesures dans un plan donné.
Mots-clés : Corrélateur cinq-port, sondeur de canal, direction d’Arrivée, Retard de propagation, MUSIC, Lissage spatial.
Abstract
The five-port correlator in microstrip technology consists of a ring with 5 arms and three diode power detectors. The ratio of two waves (Radio Frequency and Local Oscillator) is determined as a linear combination of the power levels measured at the five -port’s outputs. Advantages of using five-port are its low-cost, its less sensibility to phase and amplitude imbalances and its operation in a wide frequency band. We propose a spatio-temporal channel sounder that consists of 8 quasi-Yagi antenna elements and of 8 five-ports at reception. The channel sounder designed for indoor propagation measurements follows us to measure time delay (TOA: Time Of Arrival) and Direction Of Arrival (DOA) in azimuth and in elevation of multi-path signals simultaneously. The DOA is estimated by measuring the phase difference of signals picked up by an antenna array and the estimation of TOA is based on the phase difference measured at two successive frequencies in the band from 2.3 GHz to 2.5 GHz with frequency step of 4 MHz at one five-port. The high resolution algorithm MUSIC (Multiple Signal Classification) associated with spatial smoothing pre-processing is used for TOA and DOA estimation. The simulation and measurement results show that we can estimate a number of signals bigger than the number of antenna elements. The proposed channel sounder has its low-cost and the measurement is performed simultaneously.
Key words: Five-port correlator, Channel sounder, Direction Of Arrival, Time delay, MUSIC, Spatial Smoothing Pre-processing.
Introduction générale …………..………...……….1
Contexte de l’étude ………1
Objectifs et plan de l’étude ………...……3
Chapitre 1. Techniques de mesure et de caractérisation de la propagation………5
Introduction…………..………5
I.1. Propagation par trajets multiples ………...……….…5
I.2. Canal de propagation- Caractérisation du canal………..…..6
I.2.1. Filtre linéaire variant dans le temps ………....…6
I.2.2. Caractérisation à petite échelle du canal de propagation………8
I.3. Paramètres caractéristiques du canal de propagation ……….... 10
I.3.1. Pertes de puissance …..…...……… 11
I.3.2. Dispersion temporelle- Bande de cohérence…...………... 11
I.3.3. Décalage Doppler et Temps de cohérence…..……….…13
I.3.4. Nombre de trajets………. 14
I.3.5. Angle moyen- Dispersion angulaire….……….. 14
I.4. Sondage du canal et techniques de mesure………15
I.4.1. Technique d’impulsion directe………17
I.4.2. Techniques de mesure utilisant des séquences aléatoires……….……… 19
I.4.2.1. Technique de corrélation………..…19
I.4.2.2. Technique de corrélation glissante………..… 21
I.4.2.3. Technique de mesure par filtre adapté……… 23
I.4.2.3. Technique de mesure par acquisition large bande.……….….... 24
I.4.3. Techniques fréquentielles……… 26
I.4.3.1. Principe………..…..…… 26
I.4.3.2. Mise en œuvre……….. 29
I.4.4. Les performances d’un sondeur de canal………...… 32
Conclusion………...… 35
Introduction……… 38
II.1. Le cinq-port en technologie micro ruban……… 38
II.1.1. Anneau d’interférométrie à cinq branches……….………..41
II.1.2. Détecteurs de puissance……….… 45
II.1.2.1. Détecteur de puissance à diode Schottky………..…..45
II.1.2.2. Principe de fonctionnement du détecteur de puissance à diode Schottky….. 48
II.1.2.3. Principe de linéarisation d’un détecteur de puissance……….. 50
II.1.2.4. Correction de puissance dans le système cinq-port……….. 53
II.1.3. Réalisation du circuit cinq-port………. 56
II.2. Expressions des signaux en bande de base……….. 58
II.3. Calibration du cinq-port………...… 60
Conclusion………..… 63
Bibliographie……….. 64
Chapitre 3. Sondeur de canal SISO utilisant le cinq-port……….. 66
Introduction……… 66
III.1. Antenne quasi - Yagi……… 66
III.1.1. Choix du type d’antenne pour le sondage de canal……… 66
III.1.2. Présentation de l’antenne quasi-Yagi………. 68
III.1.3. Réseau d’antenne quasi-Yagi………..… 74
III.1.3.1. Couplage………... 74
III.1.3.2. Réseau linéaire et réseau planaire……… 76
III.2. Sondeur fréquentiel utilisant la technique cinq-port….……….…………..… 77
III.2.1. Description du système de mesure………....77
III.2.2. Calibrage du système……… 81
III.4.2. Résultats de mesure……….. 89
Conclusion………... 91
Bibliographie……….. 91
Chapitre 4. Sondeur de canal SIMO utilisant les cinq-ports………... 93
Introduction……… 93
IV.1. Description du système de mesure………..… 93
IV.2. Mesure des directions d’arrivée………..… 95
IV.2.1. Cas simple: contexte un seul trajet, deux cinq-ports …...………..…. 95
IV.2.2. Contexte général: K signaux, M cinq-ports……...………... ..97
IV.2.3. Résultats de simulation………..……….… 100
IV.2.4. Résultats de mesure………..………...… 101
IV.3. Mesure des directions d’arrivée en Azimut et en Elévation ………. 103
IV.3.1. Modèle mathématique des signaux en réception multi capteur………103
IV.3.1.1. Contexte:canal à trajet unique………103
IV.3.1.1.1. Réseau d’antennes quelconque………103
IV.3.1.1.2. Réseau planaire d’antennes dans le plan XOY ………. 106
IV.3.1.1.3. Réseau planaire d’antennes dans le plan YOZ ………. 107
IV.3.1.2. Contexte: canal à trajets multiples………. 107
IV.3.2. Simulation du système de mesure et résultats de simulation……… 110
IV.3.3. Résultats de mesure……….… 111
IV.4. Mesure conjointe DDA et retard………... 112
IV.4.1. Cas simple: un seul trajet, un réseau de deux antennes et de deux CPs……...113
IV.4.2. Cas général: K signaux, réseau de M antennes et de M cinq-ports………... 114
IV.4.3. Simulation du système et les résultats de simulations………117
IV.4.4. Résultats de mesure………... 119
Conclusion du chapitre 4...121
Conclusion générale……….… 124
Perspectives………...… 125
Publications………....127
Annexe………128
Annexe 1 - L’enveloppe complexe du signal………..128
Annexe 2- Les méthodes de calibrage du cinq-port……….. 130
Annexe 3- Approximation bande étroite dans le contexte du réseau d’antennes…...134
Annexe 4- L’algorithme MUSIC………135
Liste des figures
Fig.1.1 - Représentation en bande de base du canal de propagation……….….. 7
Fig.1.2 - Représentation des quatre fonctions du canal de propagation………...… 10
Fig.1.3 - Schéma - bloc du sondeur de canal par impulsion périodique…….……….…17
Fig.1.4 - Principe de la technique d’impulsion directe……….……….. 18
Fig.1.5 - Schéma bloc du principe de la technique de mesure par corrélation…………... 19
Fig.1.6 - Séquence PA périodique avec des impulsions rectangulaires et sa fonction d’autocorrélation périodique………..……... 21
Fig.1.7 - Schéma bloc du principe de la technique de mesure par corrélation glissante…… 21
Fig.1.8 - Sondeur de canal par filtre adapté………...…. 23
Fig.1.9 - Sondeur de canal basé sur la technique d’acquisition d’un signal large bande….. 25
Fig.1.10 - La fonction de transfert du canal……….... 26
Fig.1.11 - Equivalence dans le temps de la technique fréquentielle……… 28
Fig.1.12 - Sondeur de canal fréquentiel……….. 29
Fig.1.13 - Equivalence dans le temps de la technique fréquentielle……….... 30
Fig.1.14 - Sondeur de canal FMCW………..…....….. 30
Fig.2.1 - Corrélateur cinq-port en technologie micro ruban……….……. 38
Fig.2.2 - Détermination de w………... 41
Fig.2.3 - Anneau à 5 accès ……….. 44
Fig.2.4 - Coefficients de réflexion S11, S22 aux entrées de l’anneau à 5 branches ………….44
Fig.2.5 - Modules de S12, S13 (a) et la différence de phase entre les argument de S12 et S13 en fonction de la fréquence (b) ……….………...… 45
Fig.2.6 - Détecteur de puissance à diode Schottky ………. 45
Fig.2.7 - Adaptation en entrée du détecteur ………... 46
Fig.2.8 - Coefficients de réflexion en entrée du détecteur sans la résistance (gauche) et en présence de la résistance (droite) ………... 46
Fig.2.9 - Simulation des stubs papillon avec le logiciel ADS……….. 47
Fig.2.10 - Réjection du stub papillon ……….. 47
Fig.2.11 - Détecteur de puissance à diode Schottky avec les stubs papillon (Simulation avec le logiciel ADS) ..………… ……….... 48
Fig.2.12 - Schéma équivalent de sortie du détecteur à diode……….. 49
Fig.2.13 - Caractéristique d’un détecteur à diode Schottky……… 50
Fig.2.14 - Linéarisation du détecteur de puissance………. 51
Fig.2.15 - Mesures de vmes en fonction de Pe ... 51
Fig.2.16 - Linéarisation des 3 détecteurs de puissance du cinq-port ………. 53
Fig.2.17 - Mesures de v3 v4 et v5 en fonction de P1 ……… 54
Fig.2.18 - Montage expérimental pour la linéarisation des détecteurs de puissances……… 54
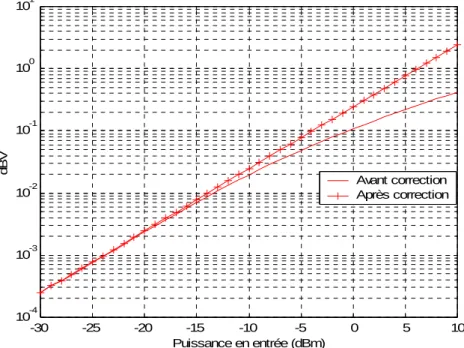
Fig.2.19 - Tension v3 avant et après correction ………. 55
Fig.2.20 - Pentes des tensions (avant et après correction) en fonction de l’indice de mesure représentant la dynamique de puissance de –30 à 9 dBm………... 55
Fig.2.21 - Circuit imprimé du cinq-port avec ADS ………. 56
Fig.2.22 - Photo d’un cinq-port en technologie micro ruban fonctionnant à 2.4 GHz……... 57
Fig.2.23 - Coefficient de réflexion à l’entrée 1 du cinq-port………57
Fig.2.24 - Récepteur basé sur le système cinq-port………... 58
Fig.3.1 - Géométrie de l’antenne quasi-Yagi………... 68
Fig.3.2a - Transition micro ruban-CPS………....68
Fig.3.2b - Antenne CPS………..…. 68
Fig.3.3 - Optimisation des chanfreins……….……. 69
Fig.3.4 - Antenne réalisée..………...70
Fig.3.5 - Module du coefficient de réflexion……….... 70
Fig.3.6 - Gain de l’antenne en fonction de la fréquence………. 71
Fig.3.7 - Diagramme de rayonnement dans le plan H de l’antenne à 2.2 GHz………... 71
Fig.3.8 - Diagramme de rayonnement dans le plan H de l’antenne à 2.4 GHz……….. 72
Fig.3.9 - Diagramme de rayonnement dans le plan H de l’antenne à 2.6 GHz……….. 72
Fig.3.10 - Diagramme de rayonnement dans le plan E de l’antenne à 2.2 GHz………. 73
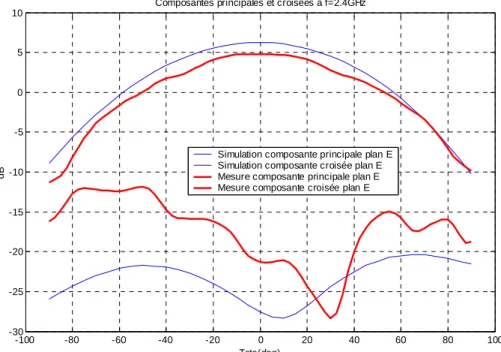
Fig.3.11 - Diagramme de rayonnement dans le plan E de l’antenne à 2.4 GHz………. 73
Fig.3.12 - Diagramme de rayonnement dans le plan E de l’antenne à 2.6 GHz………. 74
Fig.3.13 - Simulation du couplage entre deux éléments dans le plan E………...75
Fig.3.14 - Résultats du couplage entre deux éléments dans le plan E………..75
Fig.3.15 - Simulation du couplage entre deux éléments dans le plan H………...76
Fig.3.16 - Résultats du couplage entre deux éléments dans le plan H……….76
Fig.3.18 - Réseau planaire de 8 antennes quasi-Yagi……….77
Fig.3.19 -Schéma bloc du système proposé……….78
Fig.3.20 - Schéma des entrées analogiques de la carte d'acquisition PCI-MIO-16E1………78
Fig.3.21 - Schéma bloc du calibrage du système de mesure ………...82
Fig.3.22 - Lissage spatial: découpage en sous-réseaux ………..86
Fig.3.23 - Simulation du sondeur avec le logiciel ADS ……….….……… 87
Fig.3.24a - Résultat de simulation: Estimation de quatre trajets par la transformée de Fourier inverse (IFFT)……….………..… 88
Fig.3.24b - Résultat de simulation: Estimation de quatre trajets par l’algorithme MUSIC... 88
Fig.3.25a - Estimation de quatre trajets par IFFT………...89
Fig.3.25b - Estimation de quatre trajets par la méthode MUSIC……….89
Fig.3.26a - Estimation de trois trajets par IFFT ………...90
Fig.3.26b - Estimation de trois trajets par la méthode MUSIC ………..90
Fig.4.1 - Système de mesure ………...…. 94
Fig.4.2 - Photo des corrélateurs CPs et des E/Bs………94
Fig.4.3 - Photo du système de mesure complet……….94
Fig.4.4 - Réseau d’antennes et cinq-ports………95
Fig.4.5 - Récepteur basé sur les CPs………...97
Fig.4.6 - Principe du lissage spatial: subdivision en sous-réseaux………. 99
Fig.4.7 - Résultats de simulation avec le logiciel ADS en présence de quatre DDAs ……...100
Fig.4.8a - Résultats d’estimation des 4 signaux corrélés par MUSIC seul et par MUSIC associé à lissage spatial ………..….. 101
Fig.4.8b - Résultats d’estimation des 4 signaux corrélés par MUSIC seul et par MUSIC associé à lissage spatial modifié………..….... 101
Fig.4.9a - Résultats de mesure des 3 signaux non corrélés avec MUSIC……….102
Fig.4.9b - Résultats de mesure des 3 signaux non corrélés avec MUSIC et lissage spatial modifié………..… 102
Fig.4.10a - Résultats de mesure des 3 signaux corrélés avec MUSIC et lissage spatial…...103
Fig.4.10b - Résultats de mesure des 3 signaux corrélés avec MUSIC et lissage spatial modifié………...… 103
Fig.4.11 - Réseau d’antennes et signal incident : configuration quelconque……….104
Fig.4.13 - Réseau planaire d’antennes et signal incident: plan YOZ………...107
Fig.4.14 - Sous réseau pour Lissage Spatial à deux dimensions………109
Fig.4.15 - Simulation du système avec le logiciel ADS (Ptolemy) ……….110
Fig.4.16 - Résultat de simulation avec un signal de 35 degrés et -30 degrés……….111
Fig.4.17 - Mesure d’un signal de (37o, 11o)………112
Fig.4.18 - Mesure de deux signaux de (37o, 11o) et (-11o, - 4o) ….……….…. 112
Fig.4.19 - Réseau de deux capteurs………113
Fig.4.20 - Sous réseau pour Lissage Spatial à deux dimensions………116
Fig.4.21 - Résultat de simulation des six signaux non corrélés : représentation 3D à gauche et 2D à droite ………..……….. 118
Fig.4.22 - Résultat de simulation des six signaux corrélés : représentation 3D à gauche et 2D à droite ………... 118
Fig.4.23 - Résultat de mesure d’un signal avec DDA de 25 degrés et retard de 9 ns……... 119
Fig.4.24 - Résultat de mesure des trois signaux corrélés : représentation 3D à gauche et 2D à droite ……….…... 120
Liste des tableaux
Tableau 1.1 - Paramètre α en fonction de l’environnement……….... 11Tableau 1.2 - Classification des canaux………..… 15
Tableau 1.3 - Classification des techniques de mesure selon le traitement des signaux…... 16
Tableau 1.4 - Classification des techniques de mesure selon le domaine de mesure……….. 16
Tableau 1.5 - Quelques sondeurs de canal actuels dans le monde……….. 34
Tableau 3.1 - Types d’antenne planaire……….………...….…. 67
INTRODUCTION GENERALE
Contexte de l’étude:
Depuis plusieurs années, le marché de la téléphonie mobile, et du réseau sans fil présente une évolution importante et continue afin d’offrir aux utilisateurs de nouveaux services multimédia très hauts débits. Face à l’augmentation certaine du nombre des utilisateurs ainsi que celle des débits de transmission, les futurs systèmes de radiocommunications devront mettre en œuvre des techniques de plus en plus évoluées.
Les futurs systèmes de radiocommunications seront développés dans des environnements différents tels que l’intérieur des bâtiments, les milieux urbain, suburbain …. Pour cela, la connaissance approfondie du canal de propagation est primordiale pour la définition et la conception des systèmes de radiocommunications ainsi que sa caractérisation dans ces environnements. Dans le cas des antennes intelligentes ou dans les systèmes de radiocommunications utilisant des réseaux d’antennes en émission et en réception, la caractérisation spatio-temporelle est importante pour la modélisation du canal de propagation considéré alors comme un filtre variant au cours du temps et sélectif en fréquence. Le signal reçu est dégradé à cause des phénomènes physiques apparaissant dans le canal. La connaissance précise de ces phénomènes nous permet de sélectionner l’algorithme de codage, la modulation, l’égalisation et la diversité…, les plus adaptés au milieu de propagation.
Trois approches sont possibles pour la modélisation du canal de propagation:
- L’approche théorique basée sur le calcul du champ en résolvant les équations de Maxwell conduit au modèle déterministe. Avec cette approche, la résolution des équations de Maxwell demande la connaissance de plusieurs informations telles que la position et la nature des sources, les caractéristiques électromagnétiques des milieux de propagation, les conditions aux limites sur les surfaces…. Ces informations sont en général difficiles à connaître notamment dans le cas de propagation à l’intérieur des bâtiments. Dans cet environnement, la connaissance à priori d’un grand nombre de facteurs tels que les dimensions des pièces, les matériaux, l’architecture du bâtiment, la mobilité des gens, et la présence des différents objets n’est pas évidente, ce qui explique la raison de notre étude non centrée sur cette approche.
- L’approche qui est développée à partir de résultats de mesures de propagation est dite modèle statistique car les paramètres du canal sont caractérisés par les traitements statistiques. Cette approche donne rapidement l’ordre de grandeur des paramètres du canal de propagation sans recourir à la connaissance du milieu environnant. Pour aboutir à une représentation plus réaliste du canal, il est nécessaire d’effectuer un nombre important de mesures. Dans cette optique, on utilise le sondeur de canal pour déterminer ces paramètres.
- Une autre approche dite semi-déterministe est basée sur la combinaison des deux modèles précédents. Dans cette approche, le modèle statistique peut être utilisé pour corriger les données du modèle déterministe pour obtenir un modèle plus approché des conditions
Θ Θ Θ Θ Θ Θ Θ Θ Θ Θ Θ Θ Θ Θ Θ Θ ? ?
réelles. Avec cette approche, il est important de développer et de maîtriser les deux techniques précitées.
Notre étude est centrée sur l’approche statistique en utilisant le sondeur de canal comme dispositif de mesure des paramètres de propagation. Le sondeur de canal est utilisé pour déterminer la réponse impulsionnelle des canaux de propagation. Le sondeur est censé fournir la caractérisation la plus complète possible du canal de propagation, c’est à dire: - Obtenir une très bonne résolution temporelle (de l'ordre de la nanoseconde).
- Prendre en compte les variations temporelles du canal (analyse Doppler). - Afficher une dynamique de mesure importante.
- Permettre de caractériser spatialement le canal de propagation ce qui est important pour les futurs systèmes de radiocommunication.
- Avoir un faible coût de réalisation.
- Devoir être de taille réduite et suffisamment mobile pour que les mesures soient effectuées aisément dans un environnement non modifié par sa présence.
Les paramètres nécessaires pour les systèmes de radiocommunications sont présentés dans le Tableau 1.
r
P τ DDA DDD Autre
Systèmes en bande étroite
(exemple: AMPS1 aux Etats-Unis) Systèmes large bande
(exemple: IS-95, IS-136)
Systèmes en bande étroite utilisant un réseau d’antennes (exemple: GSM avec réseau d’antennes) Systèmes large bande utilisant un réseau d’antennes (exemple: IS-2000 avec réseau d’antennes)
Multiple Input Multiple Output systèmes Autres technologies (4G…)
r
P est la puissance reçue ;τ est le retard de propagation ; DDA est la direction d’arrivée ; DDD est la direction de départ.
AMPS1 : Analog Mobile Phone Service
Le sondeur de type SISO (Single Input Single Output) ne permet pas la caractérisation spatiale du canal. Pour répondre à cette exigence, les sondeurs SIMO (Single Input Multiple Output) ou MIMO (Multiple Input Multiple Output) apparaissent comme des candidats potentiels. Peu de sondeurs existants permettent de caractériser complètement le canal de propagation à cause du coût élevé de ces dispositifs. Les réalisations actuelles utilisent, soit un seul capteur qui se déplace pour effectuer la mesure dans différentes positions, soit un réseau d’antennes aux entrées desquelles commute le sondeur de canal, le tout suivi d’un traitement particulier pour corréler l’ensemble des signaux entre eux. Ces systèmes sont complexes et ont un coût élevé. De plus, le temps d’effectuer une mesure complète avec déplacement du capteur est long, empêchant la mesure des canaux variant au cours du temps.
Objectifs et plan de l’étude:
Nous proposons d’utiliser le système cinq-port pour le sondeur de canal SIMO. Actuellement, les systèmes six-port et cinq-port sont largement utilisés comme analyseur de réseaux déterminant précisément le rapport complexe entre 2 ondes électromagnétiques. Ils sont aussi appliqués dans d’autres utilisations en radar et en récepteur homodyne.
Le sujet de cette thèse porte sur la conception et la réalisation d’un sondeur de canal multi-capteurs utilisant les corrélateurs cinq-ports pour la caractérisation de la propagation à l’intérieur des bâtiments à 2.4 GHz. Ce système permet d’effectuer l’acquisition à un instant donné et en une seule fois de l’ensemble des mesures dans un plan donné. Le traitement porte alors directement sur les mesures en amplitude et phase des différents signaux reçus permettant de calculer les paramètres de ces signaux dans le canal de propagation tels que les retards de propagation et les directions d’arrivée.
Cette thèse se compose de quatre chapitres.
Le premier chapitre est centré sur l’étude de la propagation à l’intérieur des bâtiments et la représentation d’un canal de propagation basée sur les quatre fonctions de base de type Bello. Les techniques de mesure et de caractérisation d’un canal de propagation sont ensuite abordées. Nous ne nous intéressons qu’aux techniques larges bandes, c'est-à-dire celles capables de restituer la réponse impulsionnelle du canal à un instant donné. Nous analysons aussi les avantages et les inconvénients de chaque technique afin de choisir celle qui convient le mieux pour la mise en œuvre du sondeur de canal.
Le deuxième chapitre détaille le corrélateur cinq-port en technologie micro ruban. Le cinq-port est le cœur du système de mesure proposé ultérieurement. Nous présentons donc le principe de fonctionnement du cinq-port et ensuite la simulation du cinq-port avec le logiciel ADS (Advanced Design System) suivi de la réalisation du circuit. Le cinq-port présente les mêmes défauts que le démodulateur I/Q classique. Cependant une procédure de calibrage permet de minimiser et corriger les défauts de fabrication. Nous présentons donc ensuite les traitements associés au cinq-port tels que la linéarisation des détecteurs de puissance et le calibrage du cinq-port.
Le chapitre 3 concerne la réalisation d’un sondeur de canal SISO. Un sondeur SISO utilisant le corrélateur cinq-port basé sur la technique fréquentielle est proposé. Nous commençons par la conception et la réalisation de l’antenne quasi-Yagi utilisée pour ce sondeur fréquentiel. Nous montrons également la configuration de cette antenne pour une utilisation en réseau. Nous allons ensuite réaliser ce sondeur SISO composé d’un corrélateur cinq-port et d’une antenne quasi Yagi en réception. Ce type de sondeur permet de mesurer les retards de propagation de trajets multiples. Le sondeur mesure la fonction de transfert du canal et la réponse impulsionnelle est obtenue par la transformée de Fourier inverse de sa fonction de transfert. Les retards de propagation de trajets multiples sont estimés par la méthode IFFT classique et aussi par la méthode à haute résolution. Nous allons comparer les résultats de simulation du système utilisant le logiciel ADS avec les résultats de mesure. De plus, dans ce chapitre nous proposons une méthode de calibrage du système dont le but est d’extraire la fonction de transfert du « vrai » canal indépendant des caractéristiques des antennes d’émission et de réception.
Dans le dernier chapitre, nous réalisons un sondeur de type SIMO caractérisant spatio-temporellement le canal de propagation. Il est composé d’un réseau linéaire de huit antennes quasi-Yagi et d’un réseau de huit cinq-ports en technologie micro ruban à 2.4 GHz.
Avec ce type de sondeur, nous pouvons mesurer à la fois les retards de propagation et aussi les directions d’arrivée de trajets multiples. Tout d’abord, les résultats de simulation avec le logiciel ADS sont comparés avec ceux de mesure pour l’estimation des directions d’arrivée de trajets multiples. Ensuite, nous montrons les mesures de directions d’arrivée dans le plan azimutal et le plan d’élévation. Le but est de caractériser tridimensionnellement le canal de propagation. Ceci est indispensable pour la modélisation du canal de propagation à l’intérieur des bâtiments. Enfin, l’estimation conjointe « direction-retard » basée sur l’algorithme MUSIC (Multiple Signal Classification) associé au lissage spatial pour décorréler les signaux permet d’estimer un nombre de trajets supérieur au nombre d’antennes.
Ce travail de recherche a été réalisé au sein du groupe radio fréquences et micro ondes (RFM) du département communications et électronique de l’Ecole Nationale Supérieure des Télécommunications. Le travail s’articule nécessairement autour de plusieurs domaines de l’électronique : électronique hyperfréquence, électronique basse fréquence, les antennes, le canal de propagation et le traitement du signal pour les communications.
Chapitre 1
Techniques de mesure et de caractérisation de la propagation
Introduction
Pour le bon fonctionnement d’un système de radiocommunication, il est nécessaire d'avoir la connaissance précise du canal de propagation et de son interaction avec l'environnement. Les trajets multiples dus aux réflexions des ondes électromagnétiques sur les murs, les objets et l’environnement peuvent causer de sérieuses dégradations des performances, ce qui augmente les interférences inter-symboles et limite le débit du système. On utilise les profils (PDP: Power Delay Profiles) relatifs à la réponse impulsionnelle du canal de transmission pour l’analyse de la propagation à trajets multiples.
Dans ce chapitre, nous rappelons les phénomènes physiques apparaissant dans le canal de propagation. Nous présentons ensuite la représentation mathématique d’un canal de propagation. Comme notre étude est centrée sur la caractérisation statistique du canal, nous détaillons les techniques de mesure large bande des caractéristiques du canal. Nous allons analyser les avantages et les inconvénients de ces techniques afin de choisir la plus adaptée pour la mise en œuvre du système de mesure qui sera présenté dans les chapitres suivants.
I.1. Propagation par trajets multiples
En espace libre, les ondes se propagent en ligne droite en l’absence des phénomènes tels que la réflexion ou la diffraction, contrairement à la propagation à l’intérieur des bâtiments. Dans cet environnement, plusieurs mécanismes de propagation dus à la pénétration, à l’absorption et à l’effet de guidage peuvent apparaître et interviennent dans les canaux de radiocommunication.
• Réflexion: Quand une onde vient rencontrer une surface lisse de dimension très supérieure à la longueur d'onde λ du signal, il apparaît alors la réflexion qui peut être spéculaire ou diffuse. La réflexion spéculaire apparaît lorsque deux milieux différents sont séparés par une surface de dimensions très supérieures à λ et dont les irrégularités sont très petites par rapport à λ . En revanche, la réflexion diffuse existe dans le cas d’une surface à irrégularités aléatoires. L'énergie est diffusée alors dans la direction du rayon réfléchi et aussi dans des directions voisines.
6 • Réfraction: La réfraction est observée quand une onde traverse un mur, une cloison....
L'onde qui traverse ces obstacles subit un affaiblissement de puissance et est déviée dans une autre direction. La plupart des modèles de propagation radio mobile ne tiennent pas compte des absorptions dues aux corps humains et aux arbres. Ces effets deviennent importants dans le cas de la propagation des ondes millimétriques.
• Diffraction: Lorsqu'une onde rencontre une surface ou une arrête de dimensions grandes par rapport à λ , une partie de l'énergie de l'onde électromagnétique contournera l’obstacle. Il y a changement de direction de la propagation. La diffraction apparaît lorsque la liaison entre l’émetteur et le récepteur est gênée par une surface qui a des parties anguleuses.
• Diffusion: La diffusion a lieu quand une onde se propage vers des surfaces de dimensions du même ordre de grandeur ou plus petites que la longueur d'onde ou avec des irrégularités plus petites devant la longueur d'onde. Chaque irrégularité va créer une onde diffractée.
• Effet des ondes guidées: L'effet de guidage apparaît dans un couloir, dans un tunnel... Dans cette situation, les ondes se propagent suivant la direction du guide.
Dans les communications à l’intérieur ou à l’extérieur des bâtiments avec l’existence de plusieurs obstacles, les ondes émises subissent généralement une combinaison de plusieurs phénomènes cités ci-dessus avant de parvenir au récepteur. Par conséquent, l'onde émise est divisée en plusieurs faisceaux d'ondes subissant en même temps des affaiblissements et des retards relatifs aux différents trajets. Ces conditions engendrent la propagation par trajets multiples. Dans le cas d’un canal de propagation radio mobile variant au cours du temps, la configuration des trajets multiples change et provoque des évanouissements profonds sur la puissance reçue. Dans le cas de propagation à l'intérieur des bâtiments où il existe plusieurs obstacles tels que les tables, les ordinateurs, la présence de personnes... les caractéristiques de la propagation sont:
- L'atténuation de l'onde due à la distance.
- Les variations d'amplitude dues aux obstacles sur le trajet
- Les variations d'amplitude et de phase dues aux trajets multiples.
Le canal de propagation peut être représenté comme un filtre linéaire variant dans le temps en fonction de la distorsion de phase introduite par les trajets multiples.
I.2. Canal de propagation - Caractérisation du canal
I.2.1. Filtre linéaire variant au cours du temps
Comme nous l’avons décrit ci-dessus, le signal émis subit l’effet du canal avant d’arriver à l’antenne réceptrice. Lorsque le canal est invariant au cours du temps, il peut être représenté simplement comme un filtre linéaire invariant dans le temps avec la réponse impulsionnelle
( )
τh . Dans le cas où le canal varie dans le temps, le filtre équivalent sera aussi variable au cours du temps.
Le signal émis en passe bande s~
( )
t peut s’exprimer par:( )
{
( )
j ft}
e t s t s Re . 2 0 ~ = π (1.1)( )
ts est l’enveloppe complexe du signal émis s~
( )
t ; f est la fréquence porteuse. 0S’il existe K trajets dans le canal de propagation, le signal reçu en passe bande peut s’écrire comme suit: ~x
( )
t =Re{
x( )
t .ej2πf0t}
+n( )
t (1.2) Où( )
∑
( ) (
)
( ) = Ψ − = K k t j k k k e t s t a t x 1 .. τ est l’enveloppe complexe du signal ~x
( )
t . a ,k τk, Ψ sont l’amplitude, le retard et la phase du k-ième trajet. kn
( )
t est le bruit blanc additif gaussien.La réponse impulsionnelle en bande de base du filtre variant au cours du temps s’écrit [4][32]:
( )
∑
( )
(
( )
)
( ) = Ψ − = K k t j k k k e t t t a t h 1 . . , δ τ τ (1.3) où les variables τ et t de la fonction h correspondent à l’axe des retards et l’axe temporel respectivement. δ est la fonction Dirac.Les signaux émis et reçu en bande de base sont reliés par la relation suivante:
x
( ) ( ) ( )
t =hτ,t *st (1.4) Dans le cas de la caractérisation spatiale du canal, le paramètre angle d’arrivée en azimut est ajouté afin de tenir compte de la dépendance du canal en fonction des angles d’arrivée sur un réseau d’antennes en réception.La réponse impulsionnelle dans l’équation (1.3) devient:
(
)
∑
( )
(
( )
)
(
( )
)
( ) = Ψ − − = K k t j k k k k e t t t t a t h 1 . . . , , ϕ δ τ δ ϕ ϕ τ (1.5)La relation entre h ,
( )
τ t et h(
τ,t,ϕ)
est [33]:( )
t
x
Figure 1.1 - Représentation en bande de base du canal de propagation Canal de propagation - Filtre linéaire
( )
τh ou h ,
( )
τ t( )
t s8
( )
τ(
τ ϕ) ( )
ϕ ϕ π d g t h t h , , , . . 2 0∫
= (1.6) où g( )
ϕ est le diagramme de rayonnement complexe de l’antenne.I.2.2. Caractérisation à petite échelle du canal de propagation
Nous venons de montrer que le canal de propagation peut être modélisé par un filtre linéaire variant au cours du temps. Ce filtre est entièrement représenté par sa réponse impulsionnelle complexe en bande de baseh
(
τ,t,ϕ)
. Nous nous intéressons maintenant à la caractérisation ducanal de propagation. La caractérisation du canal est effectuée à grande échelle, à moyenne échelle et à petite échelle [4]. Nous nous intéressons ici à la caractérisation à petite échelle permettant de mettre en évidence les évanouissements rapides dus aux trajets multiples. La réponse impulsionnelle complexe permet d’étudier complètement les effets du canal à double dépendance en temps et en retards. Du fait de la possibilité d’effectuer des études en fréquence et en fréquence Doppler, les quatre représentations suivantes sont disponibles: • Description fréquentielle: Fonction bi-fréquentielle - G
(
f,v,ϕ)
Le module de la réponse impulsionnelle permet de distinguer les différents trajets en fonction de leurs retards de propagation. Bien que le phénomène de décalage en fréquence Doppler soit contenu aussi dansh
(
τ,t,ϕ)
, elle ne permet pas de mettre en évidence ce phénomène.Le décalage en fréquence Doppler est obtenu grâce à la fonctionG
(
f,v,ϕ)
, duale de lafonction h
(
τ,t,ϕ)
dans l’espace fréquence - décalage Doppler.La fonction G
(
f,v,ϕ)
est reliée au spectre du signal reçu et celui du signal émis:X
(
f,ϕ)
∫
S(
f v,ϕ) (
.G f,v,ϕ)
dv ∞ ∞ − − = (1.7)(
f,ϕ)
S et X
(
f,ϕ)
sont respectivement les représentations fréquentielles de Fourier de s( )
t et x( )
t ; ν est le décalage Doppler.La fonction d’étalement Doppler G
(
f,v,ϕ)
permet d’identifier directement des décalages enfréquence et elle est utilisée pour la caractérisation de la sélectivité en fréquence du canal.
(
f,v,ϕ)
G est reliée à la réponse impulsionnelle par la double transformée de Fourier: G
(
f,v,ϕ)
h(
τ,t,ϕ)
.e−j2πfτ.e−j2πvtdtdτ ∞ ∞ − ∞ ∞ −∫ ∫
= (1.8) • Description temps- fréquentielle: Fonction de transfert - H(
f,t,ϕ)
La description précédente est une approche purement fréquentielle. Une autre approche souvent utilisée consiste à relier le signal temporel en sortie du filtre au spectre du signal en entrée:
x
( )
t,ϕ∫
S(
f,ϕ) (
.H f,t,ϕ)
.ej2πftdf ∞ ∞ − = (1.9)(
f,t,ϕ)
H appelée la fonction de transfert du canal est la transformée de Fourier directe de
(
τ,t,ϕ)
h . H(
f,t,ϕ)
h(
τ,t,ϕ)
.e−j 2πfτdτ ∞ ∞ −∫
= (1.10) Cette fonction permet comme la fonction G(
f,v,ϕ)
d’étudier la sélectivité en fréquence ducanal de propagation. Si le signal d’entrée s
( )
t est sinusoïdal de fréquence f , l’étude de la 0fonction H
(
f,t,ϕ)
sur une faible largeur de bande permet de caractériser les effets des trajetsmultiples comme des affaiblissements temporels ou spatiaux. La mesure de cette fonction est très utilisée pour la caractérisation de la propagation à l’intérieur des bâtiments.
• Description retard- Doppler: Fonction de diffusion - H
(
f,t,ϕ)
Cette description est dans l’espace retard - décalage Doppler. La fonction D
(
τ,v,ϕ)
est reliéeà la réponse impulsionnelle comme suit:
D
(
τ,v,ϕ)
h(
τ,t,ϕ)
.e−j2πftdt∞ ∞ −
∫
= (1.11) Le signal reçu en sortie du filtre s’écrit:
( )
∫
(
)
∫
(
)
∞ ∞ − ∞ ∞ − ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ − = τ ϕ τ ϕ τ ϕ π d dv e v D t s t x , , . , , . j 2 vt( )
,ϕ(
τ,ϕ) (
τ, ,ϕ)
. 2π τ. dvd e v D t s t x∫ ∫
j vt ∞ ∞ − ∞ ∞ − − = (1.12) En vue d’une analyse physique, la représentation D(
τ,v,ϕ)
dans l’espace retard - décalageDoppler est très utile. En effet, cette fonction permet de suivre l’évolution des différents trajets de propagation pour un mobile se déplaçant à une vitesse constante.
Représentation des quatre fonctions:
Comme l’analyse précédente, le canal de propagation peut être représenté par quatre fonctions
(
τ,t,ϕ)
h , H
(
f,t,ϕ)
, G(
f,v,ϕ)
etD(
τ,v,ϕ)
. Ces quatre fonctions sont de type Bello [28] en ajoutant le paramètre ϕ afin de prendre en compte la dépendance du canal en fonction des directions d’arrivée. Ces quatre fonctions sont dépendantes de l’angle d’arrivée et elles sont reliées par les transformées de Fourier directe ou inverse.10
Dans une communication mobile, le canal varie aléatoirement dans le temps. Ces quatre fonctions deviennent donc des processus aléatoires. En pratique, pour la caractérisation du canal, une approche possible est basée sur l’étude des moments des processus aléatoires à partir des fonctions d’autocorrélation. Pour simplifier les études, deux hypothèses du canal WSS (Wide Sense Stationary) et du canal US (Uncorrelated Scattering) ont été proposées. L’hypothèse de stationnarité au sens large implique que les paramètres statistiques du canal sont invariants dans le temps et dépendent seulement de l’écart de temps entre deux observations. L’hypothèse de dispersion non corrélée (US) implique que la fréquence absolue n’intervient pas dans l’expression du canal. Les détails de cette approche sont présentés dans [34].
L’objectif d’un sondeur de canal est de mesurer aussi précisément que possible l’une des quatre fonctions présentées précédemment. Les autres fonctions seront retrouvées par simple ou double transformée de Fourier selon les variables t, f, τ ou ν. A partir des mesures de l’une des quatre fonctions, les paramètres caractéristiques du canal de propagation sont déterminés, permettant ainsi de modéliser le canal.
I.3. Les paramètres caractéristiques du canal de propagation
Les paramètres principaux du canal de propagation sont: 1. Les pertes de puissance.
2. La dispersion temporelle - la bande de cohérence. 3. Le décalage Doppler - le temps de cohérence. 4. Le nombre de trajets.
5. L’angle moyen- la dispersion angulaire.
Figure 1.2 - Représentation des quatre fonctions du canal de propagation Temps - Retard
(
τ,t,ϕ)
h Fréquence - Temps Retard - Doppler Fréquence - Doppler TF : La transformée de Fourier directe(
f,t,ϕ)
H(
f,v,ϕ)
G(
τ,v,ϕ)
DTF-1 : La transformée de Fourier inverse
( )
v TF−1 TF−1( )
f( )
f TF−1( )
t TF( )
t TF( )
τ TF( )
τ TF( )
v TF−1I.3.1. Pertes de puissance
Les pertes de puissance pour une position donnée sont déterminées directement à partir de la moyenne de la fonction de transfert H(f,t) dans la bande de fréquence mesurée.
( )
( )
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ =∑
N dB H f N P 1 2 10 1 log . 10 (1.13) Plusieurs travaux ont montré que les pertes moyennes d’une liaison augmentent de manière logarithmique avec la distance [3][4][35]. Le modèle des pertes de puissance moyenne est une fonction de la distance d entre les antennes d’émission et de réception.α ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = 0 0. d d P P en dB : ( ) ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = 0 10 0 10. .log d d P PdB dB α (1.14)
Où P est l’atténuation liée à une distance de référence0 d . 0
α est l’exposant d’atténuation moyenne du canal de propagation. Ce paramètre α dépend de l’environnement et varie entre 2 et 6:
Environnement α
L’espace libre 2
Radio cellulaire dans la ville (GSM urbain) De 2.7 à 3.5
Radio cellulaire dans la ville : liaison obstruée De 3 à 5
L’intérieur des bâtiments- liaison directe < 2
L’intérieur des bâtiments- liaison sans visibilité De 4 à 6
Liaison sans visibilité dans les usines De 2 à 3
I.3.2. Dispersion temporelle- Bande de cohérence
L’influence des trajets multiples du canal de propagation sur un système de transmission est évaluée par la caractérisation large bande sur une bande infinie. Dans la réponse impulsionnelle, chaque trajet est représenté par un pic. En réception, le récepteur traite une superposition du premier symbole et de ce même premier symbole retardé par les trajets multiples. Avec des retards relatifs de l’ordre de la durée d’un symbole, les phénomènes de trajets multiples entraînent des interférences entre les symboles. Quant aux retards, il existe trois paramètres pour estimer le débit maximal de transmission numérique:
Moyenne des retards (Mean excess delay) : τ L’écart type des retards (RMS delay spread) : τRMS Retard maximal (Excess delay spread).
A partir de la réponse impulsionnelle, le retard est considéré comme une variable aléatoire ayant une densité de probabilité de la forme [4]:
12
( )
( )
( )
τ τ τ τ d h h p 2 0 2∫
∞ = (1.15)Le temps moyen des retards τ est calculé comme suit:
( )
( )
( )
∑
∑
∫
= =∞ k k k k k p p d p τ τ τ τ τ τ τ . . 0 (1.16) La dispersion temporelle τRMStraduit l’étalement de la réponse impulsionnelle. Elle s’exprime comme : τRMS = τ2 −τ2 (1.17) Où( )
( )
∑
∑
= k k k k k p p τ τ τ τ 2 2Le retard maximal τexcess (Maximum excess delay) pour X dB est le retard dans lequel
l’énergie des trajets multiples chute de X dB par rapport à l’énergie maximale. τexcess =τX −τ0
Où τX est le retard maximal dans lequel l’énergie chute de X dB τ0 est le retard du premier trajet.
Bande de cohérence:
La bande de cohérence d’un canal de propagationB représente une mesure de la similarité ou c
de la cohérence de canal dans le domaine fréquentiel. Physiquement, B est une mesure c
statistique d’une bande de fréquence sur laquelle le canal de propagation est considéré comme plat.B est obtenue par une auto corrélation de la réponse fréquentielle complexe H(f ,t). c
R
( )
Δf =∫
H( )
f,t .H*(
(
f +Δf)
,t)
df∞ ∞ −
(1.18) La bande de cohérence du canal est définie par la valeur de la corrélation R
( )
Δf pour un certain pourcentage 50 %, 70 %, ou 90 % de la valeur maximale de corrélation.c
B est aussi calculée à partir de la réponse impulsionnelle :
R
( )
Δf =TF( )
h( )
τ 2 (1.19)Si le spectre du signal émis est supérieur à la bande de cohérence, le comportement du canal varie avec la fréquence. Physiquement, la bande de cohérence et la dispersion des retards
traduisent les conséquences de ce même phénomène. La relation mathématique entre B et c RMS τ est: RMS c B τ 50 1
≈ si le facteur de corrélation égale à 0.9
RMS c B τ 5 1
≈ si le facteur de corrélation égale à 0.5
I.3.3. Décalage Doppler et Temps de cohérence
Il existe toujours des mobilités dans le canal de propagation. Le canal varie donc au cours du temps. Et sa réponse impulsionnelle variera rapidement pendant la durée d’un symbole. Ces variations temporelles introduisent des décalages Doppler. La dispersion Doppler est représentée par la fonctionG
(
f,v,ϕ)
. La dispersion Doppler est ainsi égale à deux fois lafréquence Doppler maximale. c v f f BD =2. Dmax =2. 0. (1.20) Temps de cohérence T : c
Le temps de cohérence T du canal de propagation représente la durée pendant laquelle le c
canal peut être considéré comme stationnaire. Autrement dit, c’est la durée pendant laquelle les caractéristiques du canal restent quasiment constantes.
Lorsque T est supérieur au temps symbole c T , le canal est dit « peu fluctuant » , dans le cas S
contraire, le canal fluctue rapidement (fast fading).
c
T peut être lié à BD par l’une des trois relations suivantes [4]: - T est inversement proportionnel à c BD:
max . 2 1 1 D D c f B T ≈ = (1.21)
- T est calculé à partir de l’intercorrélation de la réponse du canal avec un signal sinusoïdal c
pur: D c B T . 16 9 π = (1.22) - T est calculé avec la combinaison des deux formules précédentes: c
D D c B B T . 1 0.423 16 9 = = π (1.23)
14
( )
( )
∑
∑
= = = K k k K k k k p p 1 1 . ϕ ϕ ϕ ϕ( )
( )
∑
∑
= = = K k k K k k k p p 1 1 2 2 . ϕ ϕ ϕ ϕ 2 0 2 1 1 F F − = θ δI.3.4. Nombre de trajets
Ce paramètre correspondant à la présence de trajets multiples est proportionnel à la dispersion des retardsτRMS. Il dépend de la résolution temporelle et de la dynamique du système de mesure. Si la résolution temporelle estΔτ , le nombre maximal de trajets dans une fenêtre d’observation TF sera: max ⎟+1 ⎠ ⎞ ⎜ ⎝ ⎛ Δ = τ F T K (1.24) max
K > 1, correspond à la caractérisation large bande.
max
K =1, la caractérisation est à bande étroite.
Le nombre de trajets observé est lié à la caractérisation dans le domaine fréquentielle. Si la caractérisation est effectuée dans une bande de fréquence importante, l’effet de trajets multiples sont observé. Par contre, celle effectuée à une seule fréquence ne permet pas d’analyser cet effet.
I.3.5. Angle moyen- dispersion angulaire
Ces paramètres concernent la caractérisation spatiale du canal. La caractérisation angulaire du canal de propagation est importante quand les techniques d’antennes adaptatives sont employées. Dans le domaine temporel, le récepteur large bande sépare les trajets multiples par leurs retards. Dans le domaine spatial, les trajets multiples sont distingués par leurs directions d’arrivée. Nous nous intéressons ici à la dispersion angulaire.
Angle moyen:
Quand l’ouverture à 3 dB de l’antenne augmente, le signal reçu est la somme de trajets multiples. L’information des directions d’arrivée peut être caractérisée par la distribution angulaire de puissance de trajets multiplesp
( )
ϕ . ϕ∈[
0,2π]
représente l’angle azimutal.CommeτRMS , la dispersion angulaire est caractérisée par l’écart type angulaireϕRMS. ϕRMS est
calculé par l’expression suivante [30]:
ϕ = ϕ2 −ϕ2
RMS (1.25)
Où:
k
ϕ et p
( )
ϕk sont la direction d’arrivée et la puissance du èmek trajet respectivement.
La dispersion angulaire δθ est calculée par [31]:
Avec Fn =
∫
p( )
ϕejnϕdϕ0
est le ième
n coefficient complexe de développement en série de
Fourier de p
( )
ϕ . Dans le domaine spatial, si ϕRMSest faible par rapport à l’ouverture ϕA de l’antenne, toute l’énergie du trajet direct est captée par l’antenne de réception et les trajets multiples ne sont pas séparés. Le canal est dit ‘bande étroite’. Par contre, quandϕRMS estsupérieur à l’ouvertureϕA, le canal est dit ‘large bande’. Dans ce cas, les trajets multiples sont
distingués [36].
Classification des canaux
La classification des canaux dépend des paramètres caractéristiques du canal et de la durée des symboles émisTs. Le tableau suivant résume la classification des canaux.
Domaine fréquentiel ou retard
Domaine spatial
Canal non sélectif en fréquence (canal à bande étroite) B<<Bc Canal sélectif en fréquence (canal à large bande) B>>Bc Canal à bande étroite dans le domaine spatial RMS ϕ <<ϕA
Canal à large bande dans le domaine spatial RMS ϕ >>ϕA Canal à évanouissements lents (canal non sélectif dans le temps) s T <<Tc - Canal non dispersif ou canal à évanouissement plat. - En réception, il n’est pas nécessaire de mettre en œuvre un égaliseur. - Canal dispersif en fréquence ou canal à évanouissement temporel plat
Domaine temporel ou Doppler
Canal à évanouissements rapides (canal sélectif dans le temps) s T >>Tc - Canal dispersif en temps ou canal à évanouissement fréquentiel plat - Canal dispersif en temps et en fréquence Un seul trajet direct, pas de trajets multiples Les trajets multiples sont possible séparés
I.4. Sondage du canal et techniques de mesure
La caractérisation du canal est effectuée par la mesure de la propagation dans l’environnement. Elle apporte aussi des données expérimentales permettant la détermination des paramètres du canal (le temps de cohérence, la bande de cohérence etc), qui sont très importants pour la prédiction des performances ou des limites d’un système de communications. Le choix de la méthode de mesure de la propagation dépend de l’application visée du système: transmission en bande étroite ou en large bande. D’autre part, la
16 caractérisation du canal peut être réalisée soit dans le domaine temporel par la mesure de la
réponse impulsionnelle du canal, soit dans le domaine fréquentiel par la mesure de la réponse fréquentielle du canal dans la bande de fréquence choisie. La réponse impulsionnnelle du canal est ainsi déterminée à partir de la transformée de Fourier inverse de la réponse fréquentielle mesurée. Ces deux techniques de mesures sont alors théoriquement équivalentes. En général, pour mesurer la fonctionh ,
( )
τ t , s(t) = δ(t) où δ(t) est la fonction Dirac et la sortie, x(t), est égale à la réponse impulsionnelle h ,( )
τ t . En pratique, il est impossible d’obtenir une fonction de Dirac idéale. Plusieurs méthodes sont développées pour mesurer h(t,τ) d’un canal radio par une approximation de la fonction impulsionnelle. Elles sont classées en trois catégories:1. Technique de mesure par impulsion directe
2. Techniques de mesure utilisant des séquences pseudo aléatoires (PA): - Technique de compression d’impulsion ou technique de corrélation
- Technique de corrélation glissante - Technique de mesure par filtre adapté
- Technique de mesure par l’acquisition large bande 3. Techniques de mesure dans le domaine fréquentiel
Les méthodes 1 et 2 sont effectuées dans le domaine temporel, la méthode 3 dans le domaine fréquentiel. La classification de ces méthodes est présentée dans les tableaux 1.3 et 1.4.
Techniques de mesure de propagation
Traitement des signaux à large bande Traitement des signaux en bande étroite
Technique d’impulsion directe Technique utilisant les séquences PA:
technique de corrélation Technique utilisant les séquences PA: mise
en œuvre par filtre adapté
Technique utilisant les séquences PA: Technique de corrélation glissante
Technique utilisant les séquences PA: Acquisition à large bande
Technique de modulation continue en fréquence (FMCW ou chirp)
Technique balayage en fréquence (mode pas à pas)
Techniques de mesure de propagation
Domaine temporel Domaine fréquentiel
Technique d’impulsion directe
Technique utilisant les séquences PA : mise en œuvre par filtre adapté
Technique de modulation continue en fréquence FMCW (Frequency Modulation Continuous Wave)
Technique utilisant les séquences PA :
Acquisition large bande
Technique utilisant les séquences PA: Corrélation
Technique utilisant les séquences PA: Corrélation glissante
Technique balayage en fréquence (mode pas à pas)
Tableau 1.4 - Classification des techniques de mesure selon le domaine de mesure Tableau 1.3 - Classification des techniques de mesure selon le traitement des signaux
I.4.1. Technique d’impulsion directe
C’est une mesure directe de la réponse impulsionnelle du canal par une impulsion RF périodique de durée faible. Cette méthode se rapproche d’une fonction Delta en utilisant une pseudo-impulsion à l’émission (c’est à dire un signal RF de durée faible) pour exciter le canal. Elle est illustrée dans la figure suivante :
Le générateur d’impulsion active le commutateur RF pendant un court instant, permettant ainsi de transmettre quelques périodes de la porteuse; ceci est équivalent à une impulsion étroite dans le domaine fréquentiel. Le signal reçu est amplifié, détecté et affiché sur l’oscilloscope numérique. Nous l’avons présenté dans la partie I.2.1, le canal de propagation est modélisé comme un système linéaire avec la réponse impulsionnelle en bande de baseh ,
( )
τ t . Le signal reçu en bande de base x(t) est une convolution entre la réponse impulsionnelle et le signal émis en bande de base s(t).Nous pouvons exprimer x(t) comme suit:
( )
(
k)
j K k ke s a t x = −ψk τ −τ =∑
1 (1.27) La puissance du signal reçu est donnée par:
( )
(
)
(
)
2 1 2 1 2 2 k K k k k K k k s P s a t x =∑
τ −τ =∑
τ −τ = = (1.28) kP est la puissance de chaque trajet.
x(t) et x
( )
t 2 expriment correctement l’estimation de la réponse impulsionnelle et du PDP(Power Delay Profil).
Le principe de fonctionnement de cette technique de mesure est présenté sur la figure suivante. f0 RF commutateur Amplificateur Générateur d’impulsions
Figure 1.3- Schéma - bloc du sondeur de canal par impulsion périodique
Amplificateur Filtre Passe Bande Détecteur d’enveloppe Oscilloscope numérique Canal de propagation