T
T
H
H
È
È
S
S
E
E
En vue de l'obtention du
D
D
O
O
C
C
T
T
O
O
R
R
A
A
T
T
D
D
E
E
L
L
’
’
U
U
N
N
I
I
V
V
E
E
R
R
S
S
I
I
T
T
É
É
D
D
E
E
T
T
O
O
U
U
L
L
O
O
U
U
S
S
E
E
Délivré par l'Université Toulouse III - Paul SabatierDiscipline ou spécialité : Génie Mécanique
JURY
Alain VAUTRIN (Professeur ENSM, St Etienne) Michel GRÉDIAC (Professeur UBP, Clermont-Ferrand) François HILD (Directeur de Recherches CNRS, LMT Cachan)
Jean-François MAIRE (Professeur ONERA, Châtillon) Francis COLLOMBET (Professeur UPS, Toulouse III) Jean-Noël PERIE (Maître de Conférences UPS, Toulouse III)
Ecole doctorale : Mécanique Energétique et Génie Civil
Unité de recherche : Laboratoire de Génie Mécanique de Toulouse (LGMT) Directeur(s) de Thèse : Francis COLLOMBET - Jean-Noël PERIE
Rapporteurs : Michel GREDIAC - François HILD Présentée et soutenue par Laurent CROUZEIX
Le 01 décembre 2008
Titre : IDENTIFICATION DE CHAMPS DE PROPRIETES MECANIQUES DE STRUCTURES
L’UNIVERSITÉ PAUL SABATIER – TOULOUSE III
Pour l’obtention du grade de DOCTEUR par
Laurent CROUZEIX
Ecole doctorale : Mécanique Énergétique Génie civil Et Procédés Spécialité : Génie Mécanique
IDENTIFICATION DE CHAMPS DE PROPRIÉTÉS
MÉCANIQUES DE STRUCTURES COMPOSITES À PARTIR DE
MESURES DE CHAMPS DE DÉPLACEMENTS
Soutenue le 1er décembre 2008 devant le jury composé de Michel GRÉDIAC (Professeur UBP, Clermont-Ferrand) Rapporteur François HILD (Directeur de Recherches CNRS, LMT Cachan) Rapporteur Alain VAUTRIN (Professeur ENSM, St Etienne) Examinateur Jean-François MAIRE (Professeur ONERA, Châtillon) Examinateur Francis COLLOMBET (Professeur UPS, Toulouse III) Directeur de thèse Jean-Noël PÉRIÉ (Maître de Conférences UPS, Toulouse III) Codirecteur de thèse
Laboratoire de Génie Mécanique de Toulouse (LGMT) – Equipe Composite
Chapitre I.
Contexte et outils
13
I.1. Composites : particularités et nécessité d’essais sur structures 15
I.1.1. Variabilités et représentativité des éprouvettes 15
I.1.2. Essais sur structures 17
I.2. Une technique de mesure : la Corrélation d’Images Numériques 18
I.2.1. Historique 18
I.2.2. Principe général 19
I.3. Utilisation de Mesures de Champs pour l’identification 23
I.3.1. Méthodes de recalage de modèles Eléments Finis (FEMU) 23
I.3.2. Méthodes de champs virtuels (VFM) 25
I.4. La Méthode de l’Ecart à l’éQuilibre 27
I.4.1. L’existant, le principe et quelques résultats 27
I.4.1.1. Ecriture des équations d’équilibre 28
I.4.1.2. Résolution du système 29
I.4.2. Application à des matériaux orthotropes 31
I.5. Bilan intermédiaire 32
Chapitre II.
Exemple d’essais sur tube réalisé par enroulement
filamentaire 33
II.1. Le tube par enroulement filamentaire : présentation 35
II.1.1. Obtention 35
II.1.2. Géométrie du tube considéré 36
II.2. Essais sur structure : moyens et démarches expérimentales 39
II.2.1. Le banc d’essais sur structure 39
II.2.2. Essais et montages associés 41
II.2.2.1. Essais de torsion 42
II.2.2.2. Essais de traction 45
II.3.2. Essai de torsion 53
II.3.3. Essai de traction 56
II.3.4. Essais de pression externe 59
II.4. Identification des propriétés mécaniques macroscopiques moyennes par
mesures extensométriques et jauges optiques 61
II.4.1. Stratégie 61
II.4.2. Résultats à l’échelle de la structure 62
II.4.3. Résultats à l’échelle du pli 64
II.4.4. Comparaisons avec modèles E.F. 68
II.5. Limites de l’approche proposée 70
II.6. Bilan intermédiaire 72
Chapitre III.
Identification de propriétés mécaniques : « Méthode de
l’Ecart à l’éQuilibre (MEQ) »
75
III.1. Contexte 77
III.2. Exemples simples 77
III.2.1. Exemple 1 : Une dimension, deux éléments 77
III.2.2. Exemple 2 : une dimension, n éléments 78
III.3. Cas général 2D contraintes planes 80
III.3.1. Hypothèses et notations 81
III.3.2. Méthode de l’Ecart à l’éQuilibre en différences finies 82
III.3.2.1. Equilibre d’une interface 82
III.3.2.2. Équilibre mécanique d’un élément au sein de la structure 84 III.3.2.3. Équilibre mécanique d’un nœud coin 85 III.3.2.4. Autres types d’équilibre envisageables 87
III.4. Conditionnement du système 88
III.5. Expression des déformations 88
III.6. Résolution du système linéaire 90
IV.1. La MEQ en isotrope 97
IV.1.1. Équations de saut de frontières 98
IV.1.2. Équations d’équilibre de l’élément 100
IV.1.3. Equations de coin 101
IV.2. Validation sur cas tests numériques 102
IV.2.1. Bandes iso-propriétés horizontales 104
IV.2.1.1. Défaut localisé au centre 105
IV.2.1.2. Champ de modules aléatoire 106
IV.3. Application à un matériau : le HexMC® 110
IV.3.1. Fabrication et conséquences 110
IV.3.2. Essais physico-chimiques 116
IV.3.3. Essais de traction simple : dispersions 117
IV.4. Essais multi-instrumentés 118
IV.4.1. Résultats phénoménologiques 119
IV.5. Résultats de la MEQ en différences finies 122
IV.5.1. Amélioration d’un modèle E.F. 127
IV.5.2. Contrôle non destructif par Ultrasons 129
IV.6. Bilan intermédiaire 133
Chapitre V.
La MEQ pour un matériau orthotrope avec un angle
d’orthotropie fixe
: application à l’identification d’une loi
d’endommagement 135
V.1. « Méthode de l’Ecart à l’éQuilibre » en différences finies pour un matériau
orthotrope 137
V.1.1. Changement de base et expressions des matrices de rigidité dans le
repère de mesure 137
V.1.2. « Méthode de l’Ecart à l’éQuilibre » en différences finies pour un
matériau orthotrope 141
V.2. Validation par données simulées par calcul aux élément finis 143
V.2.1. Identification de variations locales du module de cisaillement au
V.2.2.2. Essais virtuels d’identification d’une loi d’endommagement 146 V.3. Application à un essai biaxial sur un composite 2.5D C/C 151
V.3.1. Matériau et essai 151
V.3.2. Résultats de l’identification 153
V.4. Bilan intermédiaire et perspectives 157
V.4.1. Bilan 157 V.4.2. Vers une identification de champs d’hétérogénéités sur le tube
obtenu par enroulement filamentaire 158
Conclusion 161
Bibliographie 167
Depuis plusieurs décennies, la proportion de matériaux composites dans les structures aéronautiques augmente continuellement. Leur utilisation pour des pièces de structures primaires est grandissante (éléments de voilures, poutres ventrales, caisson central). A titre d’exemple, chez Airbus, la proportion de composite en masse est passée de 5 % sur l’A300-600 (1972) à 10 % sur l’A320 (1983) pour arriver à 25 % sur l’A380 (2005) et va devenir majoritaire dans le futur Airbus A350. Outre leur rapport performance/masse intéressant, ces matériaux, de par les particularités de leurs procédés d’élaboration, permettent l’intégration de fonctions (surveillance de l’état de santé par fibres optiques à réseaux de Bragg à cœur, par exemple). L’utilisation industrielle de ces matériaux n’est pas optimale car on ne tire pas tous les avantages des caractéristiques spécifiques des composites liées à leurs procédés de fabrication, à leur hétérogénéité multi échelle. Il est donc nécessaire d’améliorer la connaissance du matériau à toutes les échelles et pour des conditions d’usage représentatives. Cela nécessite le développement de techniques de caractérisation et de mesures adaptées, couplées à des moyens de contrôle et de simulation avancés.
Une grande partie des difficultés rencontrées provient du fait que les matériaux composites sont par essence anisotropes et hétérogènes. L’hétérogénéité est plus ou moins prononcée suivant l’échelle d’observation. A petite l’échelle, l’hétérogénéité provient de la mise en œuvre de deux constituants au moins : généralement des renforts (couramment carbone ou verre) et une résine liant ces derniers. Aux échelles supérieures, une relative homogénéité peut être considérée dans certains cas particuliers, notamment de géométries simples et de matériaux « modèles ». Cependant dans beaucoup de cas pratiques, au-delà de la plaque simple fabriquée au laboratoire, les procédés d’élaboration conduisent en général à des variabilités spatiales de constitution. Du point de vue de l’architecture, par exemple, ces variabilités peuvent être de plusieurs types : orientation des fibres, taux de fibres, reprises de plis, motifs de tissage, etc. Ces variabilités conduisent à des gradients de propriétés mécaniques au sein des structures. L’identification de ces propriétés est donc un défi qui contribue à une utilisation optimisée de ce type de matériaux. Hormis ces hétérogénéités initiales, les dégradations du matériau peuvent elles aussi entraîner des chutes de propriétés mécaniques hétérogènes.
Le travail présenté dans ce document vise à développer des outils capables d’appréhender des champs de propriétés élastiques (hétérogénéités initiales) ou d’endommagement au sein de structures représentatives. L’établissement d’un lien entre les variabilités, leurs causes et leurs effets permettra certainement dans le futur d’améliorer la compréhension du comportement de ces matériaux, et ainsi de mieux cerner les avantages de tel ou tel procédé d’élaboration.
L’usage de plus en plus courant de mesures de champs de déplacements, notamment par méthodes optiques, ouvre de nouvelles perspectives pour l’identification de propriétés mécaniques [Grédiac, 2004]. Ces mesures peuvent représenter un complément aux calculs par Eléments Finis (EF). On peut, par cette technique, observer la réponse en surface d’une structure sollicitée et la comparer à celle calculée par la simulation. Pour un matériau stratifié homogène, le recalage par EF (Finite Element Model Updating method ou FEMU) peut permettre, avec une sollicitation adaptée, suffisamment « riche », d’identifier 4 paramètres élastiques « dans le plan » à partir d’un nombre minimal d’essais. Un écart « simple » entre déplacements mesurés et calculés est alors utilisé comme fonction objectif dans une procédure d’optimisation. D’autres approches et d’autres fonctions objectif, principalement issues de l’école française [Molimard et al., 2005] [Le Magourou et al., 2002], ont été proposées afin de réduire le temps de calcul et permettre une extension en particulier aux cas non linéaires [Avril et al., 2008]. Deux de ces méthodes ont donné lieu à l’identification de champs d’endommagement dans des matériaux composites : la Méthode des Champs Virtuel (Vitual Field Method ([Kim et al., 2007], [Grédiac et al., 2006], ou VFM) et la Méthode de l’Ecart à l’éQuilibre MEQ (Equilibrium Gap Method, [Claire et al., 2004], ou EGM). Dans le cas d’un matériau hétérogène, même élastique isotrope, la tâche est plus ardue. La MEQ apporte une réponse. Dans ce travail, une version par différences finies 2D de la MEQ est proposée afin d’étudier à la fois les aspects liés à l’« hétérogénéité initiale » et à l’« endommagement » dans des éprouvettes isotropes et orthotropes.
Le premier chapitre propose un descriptif des principaux concepts et méthodes abordés dans ce mémoire. La problématique de l’identification du comportement des structures composites, les techniques de mesure, avec notamment un descriptif des
méthodologies utilisées dans les chapitres suivants pour l’obtention des résultats expérimentaux, et des méthodes d’identification à partir de champs de déplacements couramment utilisées sont en particulier précisées.
Le second chapitre propose de s’intéresser au comportement d’une structure composite géométriquement simple, mais pour laquelle les concepts de matériaux et de structure paraissent difficiles à dissocier. Dans ce cas, l’utilisation d’essais sur structures semble incontournable. Un tube réalisé par enroulement filamentaire présentant une architecture spécifique est étudié. Un banc d’essai, réhabilité et modifié pour l’occasion, permet d’appliquer une grande variété de sollicitations. Lors d’essais simples, le tube est filmé à deux échelles par deux paires de caméras afin de mesurer les champs de déplacements par stéréo-corrélation. Une comparaison des techniques de mesure utilisées est présentée. Une procédure classique d’identification (à partir d’essais classiques) des propriétés mécaniques « moyennes » est menée. La confrontation des mesures obtenues lors d’un essai plus complexe à l’échelle de la structure montre le bien fondé à cette échelle de cette démarche dans le régime élastique. L’exploitation des mesures effectuées lors d’un essai de traction à l’échelle inférieure met toutefois en évidence des hétérogénéités de déformations. Ceci démontre l’utilité d’une méthode d’évaluation de ces hétérogénéités pour des structures fortement orthotropes, telles que le tube réalisé par enroulement filamentaire.
Le troisième chapitre détaille une déclinaison par différences finies de la méthode de l’écart à l’équilibre (Equilibrium Gap Method) pour un matériau anisotrope hétérogène. Il présente l’ensemble des équations d’équilibre pour un matériau anisotrope quelconque, et propose de nouvelles expressions des équilibres mécaniques locaux afin, en augmentant le nombre d’équations, d’identifier un plus grand nombre d’inconnues.
Le quatrième chapitre détaille une première application de cette méthode pour un matériau isotrope hétérogène. Après une validation sur des données simulées, la méthode est alors mise en œuvre pour un composite à fibres de carbone courtes à orientation aléatoire, obtenu par compression à partir de préimprégnés de type SMC (Sheet Moulding Compound). Il s’agit d’un composite dont on peut qualifier la structure de « grossière » en comparaison de celle présentée par les stratifiés produits à
partir de nappes préimprégnées unidirectionnelles. Elle met en évidence à la fois l’hétérogénéité initiale du matériau à l’échelle de l’éprouvette et l’évolution de son endommagement. Un lien entre champs de modules identifié et caractéristiques « locales » est recherché. Une caractérisation de l’hétérogénéité par d’autres moyens, en particulier physicochimiques et par ultrasons, est proposée.
Le cinquième chapitre présente une deuxième variante de la MEQ, adaptée à l’étude des matériaux orthotropes hétérogènes avec un angle d’orthotropie fixe sur l’ensemble de la surface. Cette dernière permet en particulier d’identifier des champs d’endommagement et la loi associée au sens d’un modèle d’endommagement anisotrope (simple). Un essai biaxial réalisé sur un matériau Carbone/Carbone 2,5D sert d’exemple à ce type d’application, menant à l’identification de champs d’endommagement du module de cisaillement, et à la loi d’endommagement correspondante.
Un bilan général est enfin présenté pour récapituler les principaux résultats obtenus durant ces travaux, et une présentation d’une application à un cas proche du problème du tube obtenu par enroulement est rapidement menée.
Identification de champs de propriétés mécaniques de structures composites à partir de mesures de champs de déplacements.
Résumé du chapitre I
Dans ce chapitre, les outils et travaux qui permettent de mettre en place une méthodologie d’identification adaptée aux matériaux étudiés sont brièvement présentés. La première partie propose d’expliciter les particularités des matériaux composites liées à leur architecture. Dans un premier temps, les concepts d’échelles et d’hétérogénéité associés à la conception et la fabrication de ces derniers sont illustrés. Nous montrons comment les variabilités rencontrées à l’échelle macroscopique, voire à l’échelle de la structure, rendent une démarche d’identification classique difficile et peu représentative. Partant de ce constat, le recours à des essais sur structures représentatives semble incontournable pour un certain nombre de matériaux. La mise en place de tels essais doit s’accompagner d’un effort de mesure conséquent permettant un dialogue essai/calcul pertinent. La seconde partie de ce chapitre détaille une méthode de mesure de champ a priori simple à mettre en œuvre et autorisant les changements d’échelle. Un bref rappel de l’historique et du principe de la Corrélation d’Images Numériques est proposé. Son extension à la stéréocorrélation et les difficultés associées sont commentées. La troisième partie s’intéresse aux techniques d’identification basées sur des mesures de ce type. Le principe de quelques méthodes d’identification proposées dans la littérature et appliquées à des matériaux composites est ensuite décrit. La méthode classique de recalage par EF (FEMU) est présentée succinctement. Une alternative séduisante et peu consommatrice en ressources informatiques, la Méthode des Champs Virtuels (Virtual Field Method ou VFM), est succinctement illustrée par un exemple. Une attention particulière est enfin portée à la méthode d’écart à l’équilibre (MEQ) pour identifier des champs de propriétés élastiques.
I.1. Composites : particularités et nécessité d’essais sur structures
I.1.1. Variabilités et représentativité des éprouvettes
Dans la suite du document, les notions d’échelle sont souvent abordées. Pour illustrer le propos, l’exemple d’un matériau stratifié est utilisé. On peut classiquement définir l’échelle microscopique (notée par la suite échelle micro) comme l’échelle des constituants élémentaires (typiquement l’échelle de la fibre). L’échelle mésoscopique (notée par la suite échelle méso) est habituellement définie comme celle du pli. L’échelle macroscopique (notée par la suite échelle macro) correspond à elle à l’échelle du stratifié. Enfin, l’échelle de la structure correspond à celle de la pièce. Lorsque l’on observe à l’échelle micro, la résine comme la fibre peut présenter des hétérogénéités. Il est par exemple encore complexe de disperser de manière homogène des charges telles que les nanotubes de carbone dans la résine [Coleman et al., 2006]. A l’échelle méso, les mécanismes peuvent être visualisés par des moyens optiques. On pense par exemple à la variation de concentration en nodules thermoplastiques dans les nouvelles générations d’époxyde, comme employés par exemple dans le système fibre T800 - matrice M21 (un thermodurcissable avec des particules thermoplastiques) [Greenhalgh et al., 2006], ou à l’arrangement des fibres [Trias et al., 2007]. A l’échelle macro, le drapage sur ou dans un moule peut provoquer une ondulation parasite [Kugler
et al., 2002]. Le procédé peut lui aussi générer des contrastes de propriétés à cette
échelle. Pour des pièces de forte épaisseur, la cuisson du matériau engendre des hétérogénéités dans l’épaisseur. On peut par exemple observer l’apparition de porosité, laquelle a des répercussions sur le comportement du stratifié [Olivier et al., 1995]. Des mesures par UltraSons permettent d’en avoir une image [Mascaro et al., 2007], mais la prise en compte de ces défauts dans les codes de calculs demanderait une meilleure définition de la répartition de ces défauts. On observe également souvent le développement de contraintes résiduelles [Olivier et al., 2003] [Parlevliet et al., 2007]. Celles-ci sont généralement estimées au moyen de modèles thermomécanique plus ou moins complexes [Tarsha-Kurdi et al., 2002]. Peu d’études considèrent par contre l’influence du moule et des produits d’environnement [Tarsha-Kurdi et al., 2002]. Elles peuvent pourtant avoir des répercussions quant à la tenue en service de la structure. Un
usinage génère également des défauts locaux qui, suivant l’état du matériau, peuvent avoir des répercussions plus ou moins importantes (par exemple le perçage, [Ramesh et
al., 2007]) qui peuvent une fois de plus être difficile à appréhender et à modéliser. A
l’échelle de la structure, on imagine aisément que la réalisation des différentes fonctions de la pièce conduit à des contrastes de géométrie, d’épaisseurs, de drapage, etc. Il apparaît donc généralement des zones à gradients de propriétés, comme des prises de plis (Figure I-1) [Mulle, 2007].
Figure I-1 Eprouvette technologique pour l’étude de la reprise de plis sur une structure de préimprégnés de carbone [Mulle, 2007]
Par ailleurs, certains types de matériaux composites à matrice organique font apparaître clairement des hétérogénéités à l’échelle macroscopique. Parmi les matériaux étudiés au laboratoire de Génie Mécanique de Toulouse, on citera par exemple de tubes réalisés par enroulement filamentaire [Hernandez-Moreno et al., 2008], les matériaux fabriqués par infusion de films de résine (Figure I-2) (par exemple RFI [Marguerès et
al., 2008]), ou encore par compression SMC (par exemple le HexMC® de Hexcel Composites). Les hétérogénéités à l’échelle macroscopique peuvent conduire à une dispersion importante des comportements mécaniques observés lors d’essais classiques réalisés sur des éprouvettes normalisées [Marguerès et al., 2008].
Figure I-2 Coin de valise réalisé en HexFIT® (à gauche) et pli de préimprégné d’HexFIT® (à droite) [Marguerès et al., 2008]
10 mm
200 mm
I.1.2. Essais sur structures
Du fait des hétérogénéités rencontrées aux différentes échelles, et des couplages complexes entre les procédés et les propriétés, ce n’est donc pas un matériau et un comportement unique, mais bien un ensemble de matériaux et donc de comportements qu’il convient d’identifier [Margueres et al., 2008]. Comment alors produire des éprouvettes représentatives ? Pour certains matériaux, le problème est encore plus prononcé. C’est le cas du procédé d’enroulement filamentaire [Hernandez-Moreno et
al., 2008]. En effet, il est impossible de produire des éprouvettes normalisées planes
« représentatives ». Comment, par exemple, reproduire le frettage lié à la tension du fil [Cohen, 1997] [Mertiny et Ellyin, 2002] afin d’en mesurer ses effets ? Les tubes sont le siège de contraintes résiduelles [Casari et al., 2006]. Dans ce cas, l’essai sur une structure représentative semble plus séduisant. Il ne « reste » plus qu’à « mesurer » la réponse de la structure. L’identification des propriétés mécaniques doit alors se faire par le biais de méthodes inverses. Le parti pris dans ces travaux de thèse consiste à choisir une modélisation macroscopique simple (typiquement isotrope ou orthotrope) et à rechercher un champ de propriétés à l’échelle de l’éprouvette permettant de minimiser un écart entre déplacements mesurés et calculés.
Cette démarche, bien que séduisante, se heurte à de nouvelles difficultés. Il s’agit en effet dans un premier temps d’imaginer des chargements qui rendent la réponse de la structure sensible à tel ou tel paramètre à identifier. Il est également nécessaire de repenser l’instrumentation. La démarche classique d’instrumentation par jauges consiste à privilégier (souvent pour un cas de charge… et pour des raisons pratiques et économiques) des emplacements et des orientations de capteurs. Ceci est malheureusement peu compatible avec une exploration des réponses de la structure. La grande qualité des informations délivrées peut être opposée au caractère moyen et local de l’information délivrée. Les mesures de champ semblent être un complément adapté tant pour l’analyse multi échelle de la réponse de la structure, que pour son exploitation en termes d’identification [Grediac, 2004]. Toutefois, à l’échelle d’une structure, toutes ces informations ne sont souvent disponibles qu’en surface. Il semble enfin crucial d’obtenir un grand nombre d’informations sur l’état du matériau au sein de la structure de façon directe (essais physicochimiques, instrumentations à cœur…) ou indirecte
(Rayons X, Ultrasons …) de façon à étudier le lien entre cet « état de la matière » et les propriétés mécaniques identifiées.
On note qu’une partie des critiques formulées peuvent être levées en utilisant des outils d’imagerie 3D et en développant une instrumentation à cœur. Les matériaux composites peuvent d’ailleurs souvent être instrumentés à cœur dès la fabrication. Dans les matériaux stratifiés, les fibres optiques à Réseaux de Bragg, par exemple, sont de bonnes candidates pour permettre un suivi continué de la structure depuis son élaboration jusqu’à sa ruine [Mulle, 2007] [Hernandez-Moreno, 2006]. Dans les études abordées dans ce mémoire, on se limite toutefois à des comportements 2D et à l’exploitation des informations collectées en surface (l’observation de la surface est sensée suffire pour approcher le comportement de la structure).
I.2. Une technique de mesure : la Corrélation d’Images Numériques
I.2.1. Historique
La Corrélation d’Images Numériques (CIN) est une méthode de mesure de champs (Rastogi, 2000) non intrusive offrant l’accès aux champs de déplacements sur une surface (voire en volume) d’une éprouvette sollicitée mécaniquement. Cette méthode procède par comparaison de photographies de la surface étudiée avant sollicitation, et de la surface une fois l’éprouvette sollicitée. Elle trouve ses origines du côté de la mécanique des fluides dans les années 70. Les chercheurs étudiaient alors un moyen d’accéder à la vitesse d’un fluide simultanément en un grand nombre de points [Dudderar et al., 1977], [Grousson et al., 1977], [Barker et al., 1977]. Ils s’inspirèrent au début d’une technique développée en mécanique des solides (l’interférométrie de speckle) pour développer la Laser Speckle Velocimetry (LSV). La mise en pratique par Meynart (79, 82, etc.) finit de convaincre la communauté de la pertinence de ces méthodes. La PIV (Particle Image Velocimetry) apparaît au début des années 80. Elle reste aujourd’hui la méthode de mesure de champs par excellence dans ce domaine. Les premières applications notables de la corrélation d’images en mécanique du solide voient le jour dans les années 80 [Sutton et al., 83].
I.2.2. Principe général
De nombreux logiciels commerciaux (Vic® Correlated Solutions, Aramis® GOM, Q-400® Dantec, etc.) ou universitaires (Correla et CorrelVol développés par le LMS Poitiers, LRPMN, CorrelManuV par le LMS Ecole Polytechnique, KelKins au LMGC Montpellier, Correli au LMT Cachan, etc.) sont actuellement disponibles. En 2D et en monovision, ils procèdent généralement par recherche de correspondances entre les deux images saisies. Les images doivent donc être texturées et le motif doit être suffisamment aléatoire afin de distinguer différents motifs dans la région d’étude (Region Of Interest : ROI). Lorsque le matériau ou la lumière ne le permettent pas, un mouchetis est couramment déposé à la surface des échantillons (projection de peinture généralement, ou projection d’un bruit de Perlin). En pratique, le logiciel définit une zone souvent carrée de surface donnée (imagette ou Zone of Interest : ZOI). Il tente ensuite de retrouver, sur l’image déformée, les ZOIs qui correspondent le mieux aux motifs présents dans l’image initiale (Figure I-3).
Dans sa version la plus simple, on suppose que chaque imagette a un déplacement de corps rigide. On recherche alors de façon itérative le déplacement Ut (à l’instant t)
qu’il faut appliquer à l’imagette de référence (par exemple) pour maximiser une fonction d’intercorrélation (ou une variante) entre cette dernière et une imagette prélevée dans l’image de l’objet déformé [Sutton et al., 83]. Les signaux bidimensionnels traités correspondent aux distributions des niveaux de gris dans les images avant et après déformation. Le calcul peut se faire dans l’espace réel ou dans l’espace de Fourier [Hild et al., 1999]. Avec ce type d’approche, moyennant une interpolation locale de la fonction d’intercorrélation, on peut mesurer des déplacements subpixels. Concrètement, pour une imagette de 32×32 px² et une texture adaptée (en termes de longueur de corrélation et contrastes), avec une caméra de 12 bits, les déplacements peuvent être estimés à quelques centièmes de pixels.
Ce déplacement est alors affecté au « centre » de l’imagette M(x,y) (Figure I-3) : on peut ainsi accéder aux composantes ut et vt du vecteur déplacement dans le repère
associé à l’image. En répétant l’opération sur l’ensemble de la surface observée par les caméras, on obtient ainsi les déplacements entre les deux instants d’un nombre fini de points M, classiquement répartis régulièrement sur la surface mesurée sur une grille de
pas constant. Outre les transformations rigides, de nombreux codes proposent des hypothèses de transformations affines ou quadratiques des imagettes. Partant des composantes des déplacements, on peut ensuite calculer les déformations dans le plan considéré. Des schémas de type différences finies sont souvent utilisés. Le champ de déplacements obtenu étant bruité, la dérivation numérique de ce dernier conduirait à des cartes de déformation encore plus bruitées. Divers « filtres » peuvent être utilisés. Dans le logiciel VIC© (VIC-2D/VIC-3D de Correlated Solutions) par exemple, la déformation fournie à l’utilisateur correspond à une moyenne des déformations calculées dans un proche voisinage du point considéré. L’utilisateur spécifie donc, en plus de la taille de la ZOI et du pas de la grille, une taille de « jauge optique ». En pratique, il précise le nombre de points utilisés. La taille de cette jauge dépend de ce nombre et du pas de la grille. Plus récemment, certains auteurs ont proposé de rechercher le déplacement sous une forme particulière, par exemple E.F., a priori [Besnard et al., 2006] ou a posteriori [Avril et Pierron, 2007]. x y x y Mo(xo,yo) Mt(xt,yt) uo vo U ZOI
Figure I-3 Principe de corrélation d’images numériques avec, la position de l’imagette dans l’image de référence (à gauche) et la position de l’imagette dans l’image
déformée à l’instant t (à droite) [Sutton et al., 83]
L’utilisation d’une seule caméra filmant perpendiculairement la surface étudiée, fournit donc simplement un champ dense. Toutefois du fait de l’optique, les éventuels déplacements hors plan induisent une dilatation ou une contraction de l’image qui engendre de fait des déformations parasites. L’utilisation d’objectifs télécentriques permet de limiter les artéfacts liés à l’optique, mais limite forcément la taille de la ROI. Par ailleurs, la géométrie des éprouvettes peut ne pas être plane. L’utilisation de deux caméras en stéréovision est une solution permettant de palier ces problèmes dans les cas qui le nécessitent. Souvent qualifiée de mesure 3D, la stéréocorrélation donne en fait
accès à des déplacements 3D de points de la surface. Le principe de calcul des déplacements est le même que celui décrit pour une seule caméra en vue orthogonale, mais passe par la reconstruction géométrique de la surface filmée [Garcia, 2001]. Cette reconstruction ne peut cependant être acquise qu’après une calibration précise de la position respective des deux caméras.
Cette phase de calibration peut être résolue, comme c’est le cas pour les cas expérimentaux présentés dans ce mémoire, en déplaçant une grille ou mire (plane) devant les objectifs des deux caméras. Dans le logiciel Vic3D par exemple, la grille peut être imprimée par l’utilisateur afin d’être adaptée à la taille de la ROI. Elle consiste en une grille régulière constituée de points blancs répartis sur un fond noir (voir Figure I-4). Sur cette grille, trois points particuliers servent à calculer, en utilisant plusieurs images et en cherchant la réponse qui « convienne au mieux » à l’ensemble des images, la position et l’orientation relative des deux caméras. Les points blancs disposées autour de ces trois points particuliers permettent quant à eux de corriger les distorsions crées par les optiques. Une fois les deux caméras positionnées, la surface filmée peut être reconstruite par comparaison des images prises par les deux caméras (Figure I-5). Pour ce faire, les logiciels procèdent par comparaison d’imagettes sur chaque paire d’images, comme pour la corrélation en 2 dimensions. Ils n’interprètent pas les différences entre les deux images comme un déplacement, mais les utilisent pour recalculer la forme de la surface filmée et calculer ainsi la position de chaque imagette dans un repère associé à la paire de caméras. Les champs de déplacements sont ensuite calculés par comparaison des surfaces obtenues par la première paire d’images, et par la paire à l’instant t.
Caméra A Caméra B
Figure I-4 Principe de calibration de la position des caméras par comparaison de la position de trois points particuliers dans chaque paire d’images [Garcia, 2001]
Caméra A Caméra B Surface filmée
Figure I-5 Principe de stéréovision par utilisation d’une paire de caméras CCD [Garcia, 2001]
Les raisons du succès rencontré par la CIN sont multiples. En premier lieu, son usage est commode. En effet, nul besoin d’un éclairage laser (en tout cas pour les applications courantes). L’essai peut être réalisé en « lumière blanche » et un simple éclairage par diodes, lampes incandescentes, etc. est suffisant. En second lieu, ce progrès fulgurant de l’imagerie numérique, et en particulier le développement des caméras munies de capteurs CCD ou CMOS avec une résolution, une dynamique et une fréquence d’acquisition élevées, permet d’envisager des mesures de plus en plus précises et de permettre des études dynamiques. Son spectre d’utilisations est donc large : petites et grandes déformations (typiquement de moins de 0.01% à plus de 100%), en statique et en dynamique (avec des caméras rapides), en 2D et en 3D (tomographie, IRM…), dans un cadre multi échelles (en optique, la taille de la ROI va de moins de 0,5 mm à plusieurs mètres). Par ailleurs, le marquage de la surface, souvent nécessaire, peut s’effectuer avec de simples aérosols de peinture. Enfin, les performances des micro-ordinateurs actuels permettent des traitements rapides (aujourd’hui typiquement de l’ordre de la seconde par image pour un champ complet). En résumé, la précision de la méthode en termes de mesure de déplacement est liée au capteur utilisé (taux de remplissage, dynamique), à la texture utilisée (contrastes, taille des motifs par rapport au pixel, longueur de corrélation) et s’exprime en pixels. En optique, les objectifs permettent de jouer simplement sur la taille de la ROI, et donc sur la résolution de la méthode. Une exploration multiéchelle est donc accessible. Cette technique tend par conséquent à se répandre tant dans les laboratoires universitaires qu’industriels.
Il est toutefois assez délicat de trouver un bon compromis entre les tailles de ROI, de ZOI et les caractéristiques du mouchetis (lequel est souvent déposé de manière « artisanale »). En effet, ce qui est bon pour une ROI donnée (pour un « grandissement » donné) ne l’est pas forcément pour une autre. Enfin, même si la tentation est grande d’augmenter la taille de la ZOI afin de réduire l’incertitude sur les mesures de déplacements et le nombre de voisins considérés pour la mesure de déformation, l’utilisateur devra garder à l’esprit qu’il gomme de fait l’aspect localisé de la mesure. Les grands déplacements et grandes déformations posent un problème de prédétermination des déplacements d’ensemble. On peut aider le logiciel en adoptant des stratégies multi niveaux automatiques, telles qu’une approche multirésolution [Hild
et al., 2002], ou en lui fournissant de façon manuelle quelques repères dans les
différentes images.
Cependant, de par la densité des informations potentiellement fournies par la corrélation d’images numériques aux différentes échelles, la méthode présente un fort intérêt pour l’étude des structures. Les travaux présentés par la suite ne se limitent toutefois pas uniquement à viser des observations phénoménologiques, mais aussi à l’identification de propriétés mécaniques de matériaux composites par méthodes inverses.
I.3. Utilisation de Mesures de Champs pour l’identification
L’un des objets principaux de préoccupation de ce travail est donc de proposer des solutions d’utilisation de mesures (denses) de champs de déplacements pour identifier un champ de propriétés mécaniques, via un nombre d’essais si possible réduit. La littérature fait apparaître plusieurs « écoles » proposant des méthodes exploitées pour des matériaux isotropes ou orthotropes. On trouve une revue de ces différentes techniques dans [Avril et al., 2008]. Parmi ces méthodes, nous nous intéressons à celles appliquées à des matériaux composites et/ou à des matériaux hétérogènes.
I.3.1. Méthodes de recalage de modèles Eléments Finis (FEMU)
Une idée simple pour identifier des propriétés mécaniques à l’aide mesures de champs de déplacements consiste à recaler de façon itérative des valeurs d’un modèle
EF à partir d’une comparaison entre champs cinématiques calculés et champs mesurés [Kavanagh et al., 1971]. A chaque nouveau calcul de l’écart constaté entre les deux champs, on en déduit une correction à apporter aux propriétés mécaniques imposées dans le modèle simulé, afin d’améliorer la correspondance entre les deux champs (mesurés et simulés).
La fonction objectif couramment retenue correspond au carré de la différence entre les grandeurs mesurées (déplacements ou déformation, [Lecompte et al., 2007]) et leurs homologues calculées à partir d’un jeu de paramètres matériau pk obtenus à
l’étape k (concrètement Ex, Ey, Gxy et νxy pour un matériau orthotrope). Différents
algorithmes d’optimisation peuvent être utilisés pour minimiser cette fonction objectif. En pratique, pour approcher l’effet d’une petite perturbation des paramètres matériau pk sur les déformations obtenues εnum dans les éléments (concrètement, en 2D, εx, εy, εxy
dans chaque élément fini T3), [Lecompte et al., 2007] procèdent à un développement de Taylor au premier ordre des déformations obtenues dans chaque élément. On peut alors écrire les corrections ∆p à apporter aux paramètres pk en fonction d’une « matrice de sensibilité » S et de la différence entre les mesures de déformations réalisées εexp et déformations εnum obtenues (au pas k) par la relation :
( )
t t(
num( )
k)
p S S S p= ε −ε ∆ −1 exp ( I-1)Les termes de la matrice S correspondent en pratique à des dérivées partielles des différentes composantes de la déformation εi dans le ième élément par rapport au
paramètre pj (jème constante de l’ingénieur dans le cas présent). Typiquement en 2D orthotrope dans l’hypothèse de contraintes planes, ces termes
j i x p ∂ ∂ε , j i y p ∂ ∂ε et j i xy p ∂ ∂ε sont connus analytiquement. Un critère d’arrêt classiquement adopté consiste à évaluer la variation relative des paramètres à chaque nouvelle itération [Kavanagh et Clough, 1971]. Du point de vue des conditions aux limites et du chargement, on peut avoir recours à une modélisation [Lecompte et al., 2007], mais il est souvent bien plus
1996]. Ceci peut en particulier permettre astucieusement de s’affranchir de l’utilisation d’hypothèses souvent peu représentatives.
Les méthodes FEMU sont assez simples à mettre en œuvre et elles sont très génériques. Elles conduisent toutefois systématiquement à des temps de calculs élevés (résolution itérative). Elles sont par ailleurs généralement assez sensibles au bruit de mesure [Avril et Pierron, 2008]. Elles demandent enfin une attention particulière en termes de détermination des efforts, étant donné que seules les résultantes des actions mécaniques sur les frontières peuvent être mesurées. Concernant les matériaux composites, ou plus généralement les matériaux orthotropes, on trouve de nombreux travaux visant à identifier 4 paramètres élastiques macro [Molimard et al., 2005]
[Lecompte et al., 2007] [Silva et al., 2007]. L’hétérogénéité du champ de déformations
peut être générée un « accident géométrique » sur une éprouvette classique [Molimard
et al., 2005] [Silva et al, 2007], ou apparaître lors un essai biaxial [Lecompte et al.,
2007]. Il est possible d’étendre ces méthodes à des cas de comportements non linéaires, c’est à dire à l’étude de l’endommagement [Geers et al.] ou de l’élastoplasticité
[Cooreman et al., 2007] ou encore de la viscoélasticité [Le Magorou et al., 2002 et
2003], même si la détermination de la matrice de sensibilité peut se révéler plus délicate [Cooreman et al., 2007].
I.3.2. Méthodes de champs virtuels (VFM)
La méthode des champs virtuels (Virtual Field Method ou VFM) est une méthode non itérative d’identification des propriétés mécaniques à partir de mesures de champs de déplacement [Grédiac, 1989]. Contrairement au recalage de modèles éléments finis, elle ne nécessite pas la création d’un modèle simulant l’essai réalisé. Elle est basée sur le Principe des Travaux Virtuels (PTV). Pour un échantillon plan d’épaisseur e et de
surface S, soumis à un chargement modélisé par le vecteur contrainte T(M) en tout point
M de la surface sollicitée Sf, le Principe des Travaux Virtuels impose qu’un champ de
déplacements virtuel cinématiquement admissible u* et son champ de déformations
associé ε* doivent conduire à l’égalité des travaux à l’intérieur de l’échantillon et sur sa
∫
∫
= Sf S dS M u M T dS e σ.ε* ( ). *( ) ( I-2)En supposant que le matériau considéré est orthotrope, une relation entre le tenseur des contraintes σ et de déformation ε peut être écrite via l’introduction de la matrice de rigidité C : ε σ =C ( I-3) avec = 66 22 12 12 11 0 0 0 0 C C C C C C ( I-4)
En écrivant le tenseur des déformations sous la forme suivante :
= 6 2 1 ε ε ε ε ( I-5)
On obtient, une fois les contraintes développées, l’expression suivante de l’équation (I-1) dS M u M T dS e C dS e C dS e C dS e C Sf S S S S ) ( * ). ( *) . ( *) . * . ( * . * . 6 6 66 2 1 1 2 12 2 2 22 1 1 11
∫
∫
∫
∫
∫
= + + + + ε ε ε ε ε ε ε ε ε ε ( I-6)Chaque paire de champs virtuels U* et ε* fournit donc une équation linéaire vis-à-vis des 4 propriétés mécaniques Cpq supposées inconnues. L’identification de l’ensemble
des propriétés passe par l’écriture d’autant d’équations que d’inconnues à déterminer. En supposant les propriétés homogènes sur la surface, il faut écrire les quatre champs virtuels pour identifier les quatre propriétés du matériau orthotrope. La qualité de l’identification dépend de la technique de création de ces champs virtuels. Une procédure systématique est proposée pour la création de champs virtuels spéciaux, pour automatiser la procédure [Grédiac et al, 2004]. L’idée est d’annuler, pour chaque inconnue, les termes en facteur des trois autres inconnues dans une relation. Ainsi, pour le terme Cpq on cherche les champs spéciaux répondant au système :
= + + = + +
∫
∫
1 *) ˆ . * ˆ . ( 1 0 *) ˆ . * ˆ . ( 1 , , dS e dS e j i i j S j i j i i j S j i ε ε ε ε δ ε ε ε ε δ ( I-7)où δi,j représente le symbole de Kronecker. Ce type de champs virtuels conduit
donc à une équation de la forme :
dS M u M T Cpq =
∫
Sf ( ). *( ) ( I-8)Cette forme permet de résoudre directement, inconnue par inconnue, le problème d’identification de chaque constante élastique. Pour obtenir un champ de déformations hétérogène faisant travailler les différents paramètres du comportement, on peut adopter plusieurs stratégies. Il est possible de jouer sur la géométrie du spécimen [Grédiac et Pierron, 1998]. Des travaux récents ont permis d’étendre la méthode à des cas non-linéaires, et en particulier à l’endommagement [Chalal et al., 2006] [Grédiac et Pierron, 2006] [Kim et al., 2007].
Séduisante car « directe » et très peu gourmande en termes de coût de calcul, la méthode dépend cependant de la capacité à choisir des champs virtuels adaptés aux spécifications de besoin des essais réalisés.
I.4. La Méthode de l’Ecart à l’éQuilibre
I.4.1. L’existant, le principe et quelques résultats
L’Equilibrium Gap Method (EGM), ou Méthode de l’Ecart à l’éQuilibre (MEQ), [Claire et al., 2002, 2003, 2004, 2007] est une méthode utilisant des champs de déplacements mesurés pour l’identification. Il s’agit non pas de propriétés mécaniques moyennes sur la surface étudiée, mais de champs de propriétés en un nombre fini de régions de la structure étudiée. La formulation proposée peut être dérivée pour l’identification de champs de propriétés mécaniques ou thermiques [Claire et al., 2003]. Dans la suite de ce paragraphe, seule la version mécanique destinée à évaluer des champs d’endommagement est présentée.
∀i ≠ p ou j ≠ q
La MEQ repose sur l’écriture de l’équilibre mécanique à l’intérieur de la structure étudiée. L’idée est de chercher un champ de propriétés mécaniques qui conduit, pour un champ de déplacements donné, à l’équilibre interne (div(σ)=0) de la structure. La traduction de cet équilibre, écrit sous une forme faible (entre des éléments adjacents pour une discrétisation EF donnée de l’objet étudié), conduit à un système d’équations linéaires. Dans ce système, les inconnues sont les champs de modules élastiques, tandis que les données sont les champs de déplacements mesurés.
I.4.1.1. Ecriture des équations d’équilibre
Les équations proposées par [Claire et al., 2003] sont issues d’une formulation faible de l’équilibre. En pratique, les auteurs choisissent une discrétisation Eléments Finis (E.F.) basée sur des éléments quadrilatères à 8 nœuds. Dans chacun des éléments, les propriétés sont supposées homogènes. Ils s’intéressent en particulier à l’équation traduisant la continuité du vecteur contrainte le long de l’interface entre les deux éléments numérotés 1 et 2 (voir Figure I-6) :
0 .n =
σ ( I-9)
1 2
Figure I-6 Équilibre au point central de la frontière entre deux éléments 1 et 2
Cette condition exprimée en utilisant une approche E.F. pour le noeud milieu de cette frontière, en l’absence de chargement extérieur, donne l’équation suivante :
0 12 12 = ∂ ∂ u Em ( I-10) avec : 2 1 12 m m m E E E = + ( I-11)
Dans (I-11) le terme Emi désigne l’énergie de déformation de l’élément i et u12 le
énergie est écrite, pour l’élément e, à partir des valeurs des déplacements aux nœuds (noté ue), de la matrice de rigidité Kme de l’élément e.
Ainsi, en écrivant que les déformations ε se calculent à partir des déplacements mesurés ue via une matrice notée B, on obtient :
( ) ( )
x
=
B
x
.
u
eε
( I-12)En écrivant que la matrice de raideur de chaque élément Kme est fonction d’une
matrice de raideur de référence Kme0 et d’un endommagement unique D sur l’ensemble
de l’élément e, on arrive à :
(
1
)
me0 meD
K
K
=
−
( I-13) avec :∫
Ω = 0 . . 0 B L Bdx K o t me ( I-14)On obtient l’expression de l’énergie de déformation en fonction de la variable D supposée inconnue, de la matrice Kme0 et des déplacements aux nœuds :
e me t e me u K u D E . . . 2 1 0 − = ( I-15)
I.4.1.2. Résolution du système
En faisant l’hypothèse d’un endommagement isotrope, l’équation (I-10) décrivant l’équilibre mécanique à la frontière entre les éléments 1 et 2 mène à l’équation suivante :
( )
p
1(
1
D
1)
g
( )
p
2(
1
D
2)
g
k−
=
(
k−
( I-16)Dans cette équation, les termes g(k
( )
p2 et gk( )
p1 sont fonction des grandeurs nodales p1 et p2 (ici uniquement fonction des déplacements aux nœuds des éléments 1et2) des éléments 1 et 2 et Di est l’endommagement de l’élément i. [Claire et al., 2002]
utilisent des logarithmes. Ceci leur permet d’introduire une contrainte de positivité de l’endommagement sous la forme :
(
1 1)
ln(
1 2)
ln( )
2 ln( )
1ln −D − −D = g(k p − gk p ( I-17)
L’ensemble des équations d’équilibre aux frontières ainsi construit mène à un système linéaire pouvant, moyennant l’adoption de notations adaptées, s’écrire sous la forme matricielle suivante :
q d
M. = ( I-18)
Pour la résolution de ce système non carré, [Claire et al., 2002] proposent l’utilisation d’une matrice de poids W diagonale dans laquelle les termes sont fonctions du second membre de chaque équation :
= M W ϖ ϖ ϖ . . . 0 0 . . . . . . . . . . . . 0 . . . 0 0 . . . 0 1 1 ( I-19) avec:
( ) ( )
1.5 2 1 g p p g wk k k ( + = ( I-20)La résolution de l’ensemble de système est réalisée à l’aide d’un algorithme de gradients conjugués après avoir mis le système sous la forme :
(
Mt.W.M) (
.d = Mt.W)
.q ( I-21)Cette méthode est donc écrite initialement pour l’identification d’endommagement. L’interprétation des écarts constatés en terme d’hétérogénéités initiales en début d’essai est naturelle. Toutefois pour obtenir des valeurs « absolues » des modules élastiques, une donnée statique est nécessaire. Enfin, la méthode n’a été appliquée qu’à des cas de matériaux composites isotropes et initialement homogènes à l’échelle macro (SMC à « microstructure fine »).
I.4.2. Application à des matériaux orthotropes
Pour aborder les problèmes liés aux structures composites, nous nous proposons de décliner la méthode dans une version dont la nature orthotrope est originale. La déclinaison de la MEQ présentée ci-dessus ne peut s’appliquer aux matériaux composites pour lesquels une modélisation macro orthotrope est requise. En effet, la MEQ fournit, dans son écriture d’origine, deux équations par interface entre deux éléments adjacents. Pour une grille de discrétisation carrée de a.a éléments, cette approche conduit à la formation de 4.(a²-a) équations. Ecrit sous cette forme, le nombre d’équations n’est donc pas suffisant pour l’obtention de plus de 3 inconnues par élément.
Par ailleurs, la prise en compte de la matrice de souplesse orthotrope dans les équations décrites au paragraphe précédent mène à des grandeurs nodales de la forme suivante (grandeur nodale pour l’élément à gauche d’une frontière verticale et pour l’équilibre dans la direction normale à cette frontière) :
] ). . 20 . 20 . 25 20 . 40 . 25 . 20 . 5 80 . 5 ( ). . 80 . 5 . 20 . 40 . 40 . 20 . 25 . 50 . 20 . 5 . 20 . 25 ( ). 4 . 4 . 8 . 8 . 2 . 2 . 2 .( 10 ) . 12 . 96 ( ) . 96 . 12 . 12 . 12 [( ) 1 ² ( 90 1 g 2 2 7 3 1 3 5 6 7 4 1 4 1 7 8 3 1 5 5 2 7 6 3 8 5 6 2 1 5 7 1 8 4 3 7 5 yx lt t l lt lt t lt l l lt G E E v u v u u v v v u v G u v u u u u v u v v v v E u u v v v v v E u u E u u u u El Et v ν ν − − + − − − + + + − + − + + − + + + + + − − − + + − − + + − − + + − − + − − = ( I-22)
Cette grandeur nodale fait intervenir les quatre grandeurs El, Et, υlt et Glt sous 6
formes différentes : El, Et, υlt.Et, Glt, (υlt²Et/El.Glt) et (υlt²Et/El-1). Cette forme ne permet
plus une forme logarithmique du système. Enfin, cette approche du problème par une formulation faible rend l’interprétation des équations assez complexe. Dans la suite du document, nous décidons de proposer et d’utiliser une approche par différences finies de la méthode MEQ.
I.5. Bilan intermédiaire
Dans ce chapitre, nous avons insisté sur la présence d’hétérogénéités aux diverses échelles dans la plupart des pièces fabriquées en matériaux composites, y compris celles pour lesquelles la fabrication est réputée « maîtrisée ». Nous avons ensuite décrit les outils essentiels pour approcher, voire identifier, le comportement de ce type de structures hétérogènes. Le cœur de la démarche proposée repose sur l’exploitation de mesures de champs réalisées par Corrélation d’Images Numériques (CIN) lors d’essais sur structures. La méthode de l’écart à l’équilibre présente l’avantage de pouvoir identifier des champs de propriétés en ne se basant que sur des mesures cinématiques, et elle est retenue dans les études présentées dans de mémoire. Dans le prochain chapitre, pour illustrer la problématique de l’étude sur un cas typique, l’exemple d’un essai multi-instrumenté sur un tube obtenu par enroulement filamentaire est exposé.
Identification de champs de propriétés mécaniques de structures composites à partir de mesures de champs de déplacements.
Chapitre II. Exemple d’essais sur
tube réalisé par enroulement
Résumé du chapitre II
Un tube réalisé par enroulement filamentaire est choisi comme exemple du type de difficultés rencontrées dans les structures composites. En effet, pour ce type de matériaux, les aspects liés à la structure et au matériau semblent indissociables. L’hétérogénéité ainsi que les gradients de propriétés sont évidents et compromettent sérieusement une approche classique de caractérisation.
Dans le premier paragraphe, le procédé de fabrication par enroulement filamentaire est brièvement décrit. Les particularités du « tissage » retenu (qui fait apparaître en particulier une cellule élémentaire) et de l’architecture générale de la structure sont présentées.
Le second paragraphe se focalise sur un banc d’essais sur structure « modulaire » modifié et remis en route à cette occasion. Une brève description de la machine, puis des modules tant spécifiques (tels que les « mors » expansibles) que génériques (tels que les poulies) conçus à l’occasion de cette étude est proposée. Les instrumentations utilisées, par rosettes extensométriques et Corrélation d’Images Numériques (CIN) sont détaillées. Concernant la CIN, deux paires de caméras permettent de mesurer les champs de déplacements ainsi que la géométrie à l’échelle de la structure et à celle de la cellule élémentaire. Les montages correspondant à deux types d’essais particuliers (traction et torsion) sont présentés.
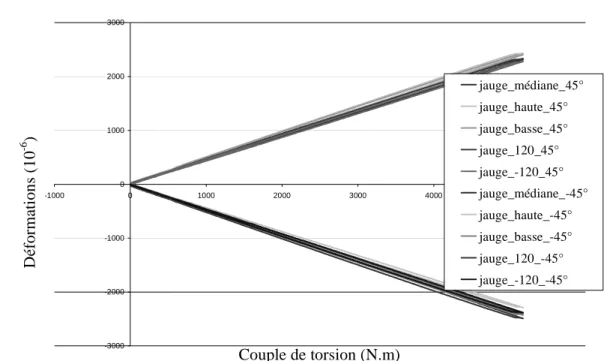
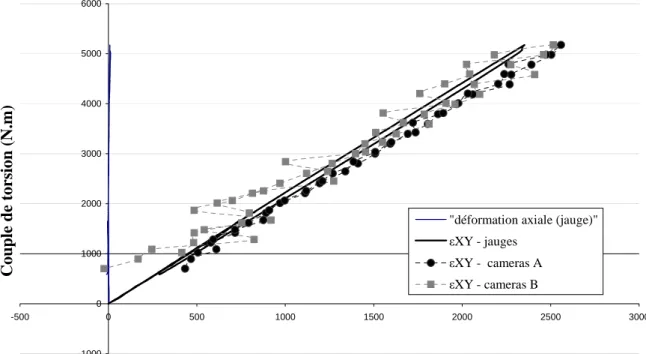
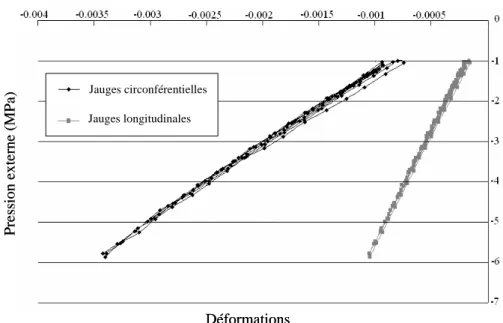
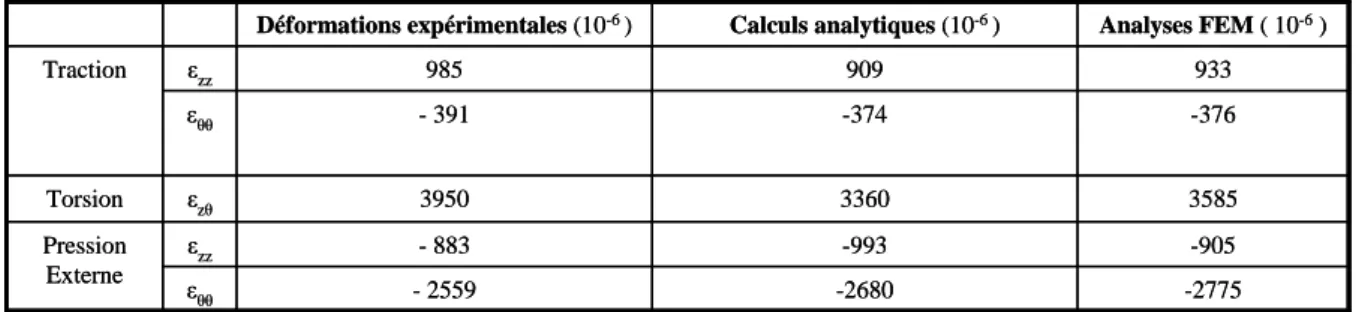
Le troisième paragraphe présente les résultats des essais. Dans un premier temps, le potentiel en termes de caractérisation des géométries par stéréocorrélation est illustré. Dans un second temps, les résultats des premiers essais réalisés (torsion, traction) sont présentés. Les différentes mesures de déformations réalisées (par CIN à deux échelles et par jauges) lors d’essais de torsion ou de flexion sont comparées pour des tailles de jauges équivalentes. Les résultats d’un essai de pression externe avec effet de fond réalisé au centre IFREMER de Brest sont présentés.
Le quatrième paragraphe propose une démarche « classique » d’identification du comportement élastique « moyen » basée sur les mesures extensométriques « classiques » et les essais « classiques » cités précédemment. L’ensemble des équations nécessaires à l’identification est déterminé de façon analytique. Il est ensuite proposé de déterminer, à partir de la théorie des stratifiés, les paramètres élastiques du pli moyen « équivalent » à l’échelle macro. Ces données, introduites dans un modèle EF, permettent de simuler le comportement « moyen » de la structure et de valider la procédure d’identification proposée.
Le dernier paragraphe s’attache à souligner l’hétérogénéité des déformations mesurées par CIN à l’échelle de la cellule lors d’un essai de traction à divers stades de chargement.
II.1. Le tube par enroulement filamentaire : présentation
II.1.1. Obtention
L’enroulement filamentaire est l’un des plus anciens procédés d’élaboration de structures composites [Rosato et Grove, 1964]. Destiné à la production de structures de révolution, il consiste en un bobinage d’un filament (ou d’une mèche constituée de plusieurs filaments) imprégné de résine sur un mandrin tournant autour de son axe. Dans l’enroulement par « voie humide », le filament de renfort (généralement verre ou carbone) est préimprégné avant son bobinage par la résine choisie (généralement époxyde) dans un bac de préimprégnation. La combinaison du mouvement de rotation du mandrin sur lequel s’enroule le filament et des déplacements du support fournissant le filament crée un tissage particulier, fonction des rapports relatifs de ces vitesses (Figure II-1). Le pas p entre deux filaments déposés lors d’un même mouvement continu de translation sera en effet égal au déplacement effectué par l’œillet pour un tour du mandrin.
Filament de roving
Mandrin tournant
Figure II-1 Principe de l’enroulement filamentaire
L’angle α (Figure II-2) que présentent les filaments enroulés suivant l’axe de rotation est directement dépendant du pas entre deux filaments consécutifs p et du diamètre du mandrin d :
) tan( . α πd p= ( II-1)
α
pasFigure II-2 Caractéristiques géométriques de l’enroulement
La position de l’œillet est pilotée par un automate à commande numérique. Ceci permet de placer précisément chaque filament au cours du même mouvement de translation, mais également lors des passes successives qui mènent à la création d’une couche puis du tube complet. La superposition des différents filaments entre passes successives crée ici au niveau du pli un motif de tissage particulier (Figure II-3). On peut notamment noter à ce stade que le motif général est créé par la répétition d’un motif de base (appelé cellule élémentaire de tissage). La taille de cette cellule élémentaire est fonction du pas p dans la direction de l’axe de rotation du mandrin, de l’angle d’hélice α dans la direction tangentielle et de la programmation choisie pour réaliser chaque couche.
Figure II-3 Motif de tissage II.1.2. Géométrie du tube considéré
Le tube obtenu par enroulement filamentaire a été produit de manière à étudier l’influence du motif de tissage sur le comportement mécanique de ce type de structure
[Hernandez Moreno, 2006]. Devant la difficulté de créer une éprouvette représentative simple et plane reprenant toutes les problématiques de ce type de tissage, l’objet des études mécaniques ne pouvait être que la structure elle-même. Il apparaît difficile de réaliser une structure plane recréant la cellule en respectant les propriétés physico-chimiques de la structure réelle. En particulier, les tentatives de création d’une structure plane par enroulement filamentaire (afin de conserver une tension du fil) sur un mandrin adapté ont mis en évidence une forte variabilité du taux de résine sur la plaque ainsi créée, du fait de la migration de la résine due à la force centrifuge durant la rotation du mandrin. Afin de maximiser l’influence du tissage pour étudier le comportement d’une cellule élémentaire sous sollicitation mécanique, l’éprouvette considérée est produite en superposant les cellules élémentaires d’un pli à l’autre (Figure II-4).
Pli n Pli n+1 Pli n+2
Figure II-4 Superposition des motifs de tissage dans l’épaisseur
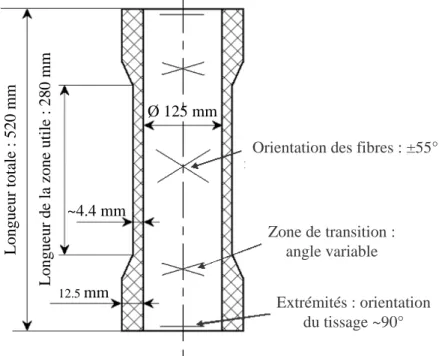
L’enroulement choisi pour l’éprouvette est dicté par les conditions de fonctionnement en eaux profondes. L’objectif est d’obtenir la meilleure tenue pour un tube immergé sous haute pression, avec effet de fond. L’angle α adopté découle de cette analyse et correspond à 55 degrés. De la même manière, le diamètre intérieur correspond également à celui de démonstrateurs antérieurs [Hernandez Moreno, 2006], à savoir 125 mm. Le pas a été calculé de manière à obtenir un nombre entier de cellules sur une circonférence. La fibre retenue est en verre de type E présentée sous la forme d’un roving de 1200 tex (principalement pour des raisons économiques et
d’approvisionnement) et la résine est un mélange d’araldite LY 5052 d’un durcisseur HY 5052.
Le démonstrateur fabriqué étant destiné à être testé mécaniquement, avec notamment l’utilisation de mesures de champs de déplacement par méthodes optiques (stéréo-corrélation d’images numériques), la taille de la cellule est suffisamment réduite pour être couverte par la même paire de caméras durant la mesure. Un nombre de cinq cellules sur la circonférence a été choisi.
La longueur de la partie courante du démonstrateur considéré est calculée de manière à obtenir un champ de contrainte homogène au centre de la zone courante.
Lo ngu eur tota le : 52 0 m m L o ng ueu r d e l a zo ne u tile : 28 0 m m 12.5 mm ~4.4 mm Ø 125 mm
Orientation des fibres : ±55°
Zone de transition : angle variable
Extrémités : orientation du tissage ~90°
Figure II-5 Géométrie du tube sélectionné pour les essais sur structure
Le tube réalisé pour les essais mécaniques à une longueur totale de 520 mm, un diamètre intérieur de 125 mm pour une longueur de la zone d’étude de 280 mm (Figure II-5). L’épaisseur de la zone courante est dictée par le nombre de couches enroulées : 14 couches qui mènent à une épaisseur de 4.4 mm. Les extrémités, plus épaisses du fait des caractéristiques de l’enroulement et renforcées par un bobinage circonférentiel à 90°, sont conservées comme zones de reprise pour les sollicitations.
Le procédé d’enroulement conduit donc à une structure hétérogène à l’échelle macro, mais aussi à l’échelle de la structure. Côté macro, certaines zones sont assimilables à des stratifiés classiques, tandis dans les régions de croisement, le matériau s’apparente plutôt à un tissé. Côté structure, l’angle d’enroulement varie le long du tube, et l’empilement des couches conduit à un décalage des cellules en dehors des parties centrales. Le procédé conduit par ailleurs à l’apparition de contraintes résiduelles. Ces dernières peuvent par exemple être visualisées par découpe d’anneaux et d’échantillons au sein de tubes [Casari et al., 2006]. Ce point a été étudié avec l’aide de Pierre Michelutti [ 2006] à l’occasion de son stage de Mastère Recherche. Des études du comportement « hors plan » menées sur des anneaux ont également été entreprises. Ces études, comparables à celles proposées par [Moulart et al., 2006], se concentraient sur deux régions de l’anneau soumis à une traction diamétrale : la zone proche du couteau, et la région proche du plan de symétrie. Ces derniers points ne sont pas développés dans ce mémoire. Il semble illusoire, au regard de toutes ces remarques, ou tout au moins fort complexe, de prélever des éprouvettes qui représentent le comportement du matériau dans différentes zones de la structure afin d’en modéliser le comportement. On pourrait alors envisager de fabriquer des éprouvettes planes, soit manuellement, soit à l’aide d’un mandrin de section rectangulaire. Même si de tels travaux peuvent renseigner sur un certain nombre de propriétés, les éprouvettes pourront difficilement être représentatives (e.g. pas de frettage dans les deux cas, pas de tension contrôlée dans le cas de la fabrication manuelle). Nous avons donc choisi d’étudier l’ensemble de la structure et de mettre en œuvre une instrumentation adaptée multiple.
II.2. Essais sur structure : moyens et démarches expérimentales
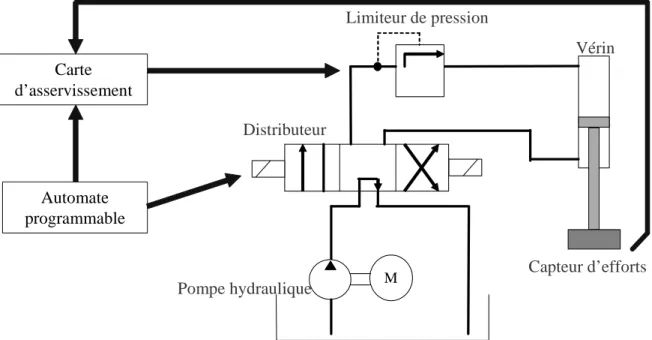
II.2.1. Le banc d’essais sur structure
Au début de cette étude, un banc d’essai sur structure était disponible au laboratoire. Ce banc est prévu pour mener des essais mécaniques sur structures de grandes dimensions. Matériellement, le banc met à disposition un large plateau rainuré carré (1,5 m x 1,5 m) surmonté d’un portique mobile. Le plateau bridé au sol présente de nombreuses rainures en Té et alésages de reprise permettant une fixation rigide de la