Caractérisation des comportements posturo-cinétiques en sprint
Texte intégral
Figure
Outline
Documents relatifs
Les charbons actifs (CA) possede,nt une héterogenéité de surface liée à la présence d'héteroatomes comme I'oxygène ou encore l'azote. La concentration de ces éléments
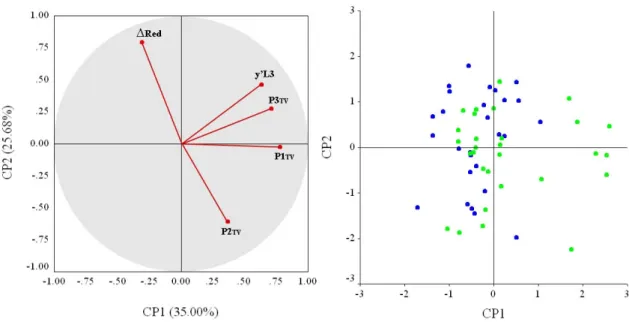
Si l’on considère que la cinétique de transformation isochrone peut être modélisée en utilisant l’équation de Johnsson- Mehl-Avrami [4], nous pouvons donc
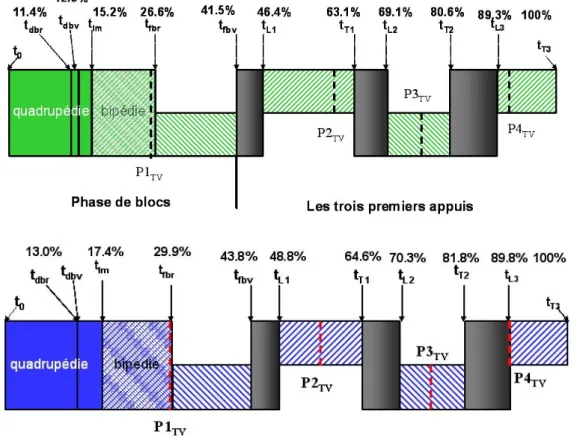
De plus, comme nous l’avons évoqué dans la partie « 3.2 Stabilisation de la posture », nous pourrions incrémenter ce modèle par l’hypothèse d’une organisation
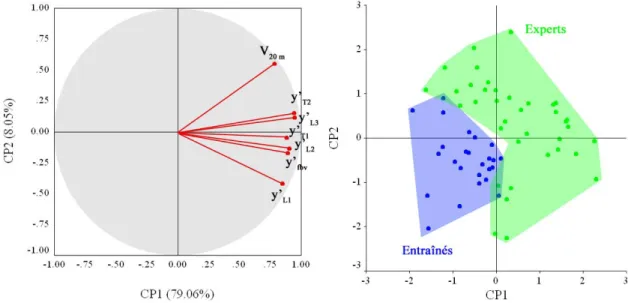
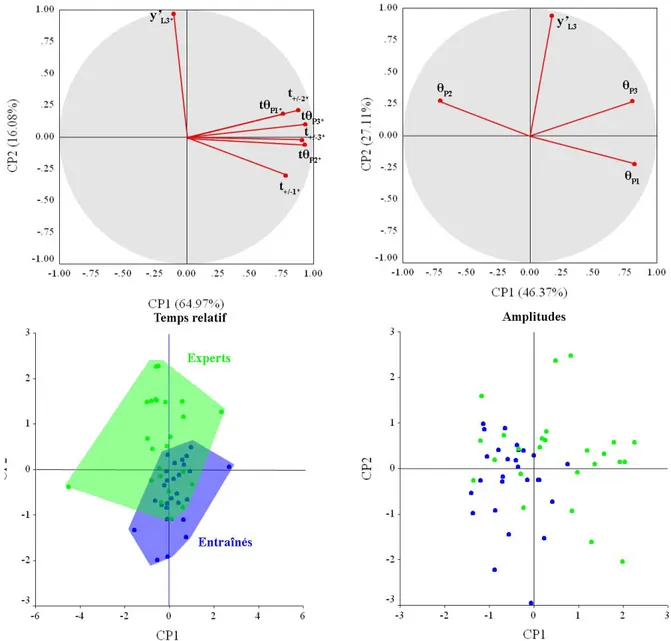
Le travail présenté dans ce document a pour but de caractériser mécaniquement les critères de qualités du départ de la course vitesse sur 100 m ; ces
En utilisant la figure 2 et la figure 3, déterminer la distance parcourue par le motard lorsque celui-ci a atteint une vitesse de 162 km.h -1.. (Pour les matheux) : à partir
Une étude cinétique de la réaction mène déduire que l’évolution de la masse du réactif (la vitesse de la réaction) est proportionnelle à cette masse du réactif.. On étudie
- l'accélération normale existe dès lors qu'un solide est en mouvement de rotation, de translation circulaire, ou en mouvement plan. - l'accélération normale est aussi
[r]
