Emulate an Analog Nonlinear Audio Device, is it Possible ?
ABAV, Belgium, 2016Schmitz Thomas
Department of Electrical Engineering and Computer Science, University of Li`ege
24 janvier 2016
Communication Outline
1 Why nonlinear models are important ?
2 Non-linear modelling
IR measurement
3 Real audio devices emulation
Objective evaluation of the model Model limitations
Why nonlinear models are important ?
Section 1
Why nonlinear models are important ?
Why nonlinear models are important ?
Nonlinear Devices
A system is nonlinear if :
it does not respect the principles of superposition (additivity) and homogeneity (scaling)
Almost all audio devices exhibit a nonlinear behavior
Loudspeakers. Amplifiers. Compressors.
Guitar and Keybord sound effects. Microphones.
Acoustic field :
More generally, the system equations governing fluid dynamics (for sound waves in liquid or gazes) and elasticity (for sound waves in solid) are nonlinear.
Why nonlinear models are important ?
Why Try to Emulate Audio Devices
Figure:Home studio ?
Advantages of the simulation :
Wide variety of sounds and timbres. Weight and overcrowding.
Cheaper.
Figure:Home studio !
Figure:Objective of the work
Non-linear modelling
Section 2
Non-linear modelling IR measurement
Nonlinear Systems Identification Techniques
Autonomous models
Physical model (non black box). NARMAX model (difficult to identify). MISO model (difficult to identify). Volterra model (difficult to identify). Neural network (too many
parameters). ...
Non autonomous models
Extended Kalman filter. Particle filtering. ...
Non-linear modelling IR measurement
Nonlinear Emulation : Volterra Series
Non-linear modelling IR measurement
Miso to Hammerstein model
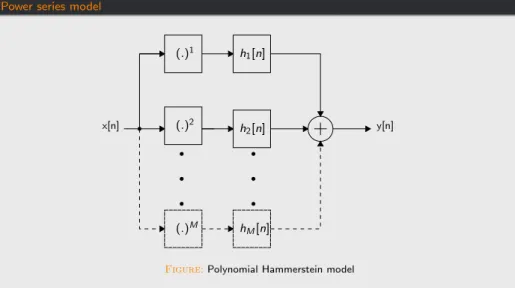
Power series model
x[n] (.)M (.)2 (.)1 h 1[n] h2[n] hM[n] y[n]
Figure:Polynomial Hammerstein model
y [n] = x [n] ~ h1[n] + x [n]2~ h2[n] + ... + x [n]M~ hM[n] (1)
Non-linear modelling IR measurement
OHKISS method
From Identification to Emulation
Sine Sweep Exponential Under Test Device Guitar Signal Input Sine Sweep Inverse Hammerstein Kernels Computation Model Emulation Hammerstein Emulated Device Output OHKISS Emulation ss[n] ss[n] hm[n] y1[n] x [n] y2[n]
Non-linear modelling IR measurement
Deconvolved ESS Through a NL Device
z[n] = y [n] ~ x−1[n] (2) 15 16 17 18 19 20 21 −0.1 −0.08 −0.06 −0.04 −0.02 0 0.02 0.04 0.06 0.08 0.1 Time(s) Amplitude h’3 h’5 h’4 h’2 h’1 ∆3=3.18s ∆2=2.01s
Figure:z[n], the deconvolution of the ESS through a Nonlinear device
From measured kernels to Hammerstein kernels (see [5])
h0m[n] compute
=⇒ hm[n] (3)
Real audio devices emulation
Section 3
Real audio devices emulation Objective evaluation of the model
Real Output Device Signal vs Emulated Signal
ss[n] Nonlinear y1 y2 ssm[n] z[n] ss[n] Compute Volterra kernels (.)M hm[n] Convolution NL device under test 0 20 40 60 80 100 120 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 Sample [n] Amplitude y 1 y 2Figure:Output signal from TSA15 (y1)and emulated
Real audio devices emulation Model limitations
So what ?
Figure:The Grail of emulation techniques ?
0 50 100 150 200 −1 −0.5 0 0.5 1 Sample [n] Amplitude y 1 y 2
Figure:Comparison between the real output signal
with an input amplitude of 0.5 (y1) and the simulated signal where Hammerstein kernel where calculated for a input amplitude of 1 (y2)
Principal limitation :
Conclusion
Section 4
Conclusion
Conclusion
Questions ?
Hammerstein model do not fits for all input amplitude but works well for a given
level.
Can we measure several models at different levels and switching between them ? Do we have to try others models and identification methods ?
Conclusion
Thank you for your attention !
Conclusion
Bibliography
M.Schetzen, The Volterra & Wiener Theory of Nonlinear Systems (John Wiley & Sons, 1980).
T.Ogunfunmi, Adaptive Nonlinear System Identification : The Volterra and Wiener Model Approaches (Springer, 2007).
F. Kadlec, P. Lotton, A. Novak, & L. Simon, ”A new method for identification of nonlinear systems using miso model with swept-sine technique : Application to loudspeaker analysis,” presented at 124th Convention of the Audio Engineering Society (2008 May), convention paper 7441.
A. Farina, A. Bellini, & E. Armelloni, ”Nonlinear Convolution : A New Approach for the Auralization of Distorting Systems,” presented at the 110th Convention of the Audio Engineering Society (2001 May), convention paper 5359.
T. Schmitz, J.J. Embrechts, ”Nonlinear Guitar Loudspeaker Simulation,” presented at the 134th Convention of the Audio Engineering Society (2013 May),convention e-Brief 96.


![Figure : z[n], the deconvolution of the ESS through a Nonlinear device](https://thumb-eu.123doks.com/thumbv2/123doknet/6944971.196434/11.544.102.443.67.280/figure-z-n-deconvolution-ess-nonlinear-device.webp)


