HAL Id: hal-03145423
https://hal.archives-ouvertes.fr/hal-03145423
Submitted on 18 Feb 2021
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of
sci-entific research documents, whether they are
pub-lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destinée au dépôt et à la diffusion de documents
scientifiques de niveau recherche, publiés ou non,
émanant des établissements d’enseignement et de
recherche français ou étrangers, des laboratoires
publics ou privés.
Hydro-acoustique et réservoirs : Validation d’un drone
hydroacoustique en réservoir et discrimination de cibles
par approche large bande
Arthur Blanluet, Chloé Goulon, Jean Guillard
To cite this version:
Arthur Blanluet, Chloé Goulon, Jean Guillard. Hydro-acoustique et réservoirs : Validation d’un
drone hydroacoustique en réservoir et discrimination de cibles par approche large bande. [Rapport de
recherche] CARRTEL. 2020. �hal-03145423�
Hydro-acoustique et réservoirs
Validation d’un drone hydroacoustique en réservoir et
discrimination de cibles par approche large bande
Arthur Blanluet, Chloé Goulon, Jean Guillard
Univ. Savoie Mont Blanc, INRAE, CARRTEL
Pôle R&D ECLA (OFB – INRAE – USMB)
A
UTEURSArthur Blanluet – IR CDD – UMR CARRTEL (INRAE -USMB)
arthur.blanluet0@gmail.com
Chloé Goulon – IE - UMR CARRTEL (INRAE -USMB)
chloe.goulon@inrae.fr
Jean Guillard – IR HDR – UMR CARRTEL INRAE -USMB)
jean.guillard@inrae.fr
C
ORRESPONDANTSArthur Blanluet- arthur.blanluet0@gmail.com
INRAE: Jean Guillard- jean.guillard@inrae.fr
A
UTRES CONTRIBUTEURSLaurent Berger – Ingénieur de recherche – Ifremer Brest – laurent.berger@ifremer.fr Jean-Christophe Hustache -Technicien de recherche – INRA UMR CARRTEL - jean-christophe.hustache@inrae.fr
Droits d’usage : accès libre Niveau géographique : mondial
Couverture géographique : Haute - Savoie ; Savoie Lacs d’Annecy et du Bourget
Hydro-acoustique et réservoirs
Validation d’un drone hydroacoustique en réservoir et discrimination de cibles par approche large bande
Rapport Final 2020 Blanluet A., Goulon C., Guillard J.
H
YDRO-
ACOUSTIQUE ET RESERVOIRS:
V
ALIDATION D’
UN DRONE HYDROACOUSTIQUE EN RESERVOIR ET DISCRIMINATION DE CIBLES PAR APPROCHE LARGE BANDE
R
ESUMEL’hydro-acoustique est devenue une méthode incontournable de l’évaluation des populations de poissons dans les écosystèmes lacustres et de la description de leurs relations avec l’écosystème. Cette méthode, non intrusive, fait désormais partie intégrante des procédures d’échantillonnage des peuplements de poissons recommandés par la DCE et a fait l’objet d’une normalisation par le Comité Européen de Normalisation (CEN EN 1590). À l’heure où l’utilisation de ces méthodes s’intensifie, le nouveau défi est leur utilisation de façon autonome afin de pouvoir acquérir plus de données aussi bien spatialement que temporellement. De plus, la nouvelle génération de sondeur type large bande récemment commercialisée permettra de mieux prendre en compte les réponses fréquentielles des cibles pour aborder la discrimination spécifique ou mieux décrire les écosystèmes en limitant par exemple les confusions possibles entre bancs de poissons et arbres immergés. Un engin autonome, le HARLE (Hydroacoustic Autonomous boat for Remote fish detections in LakE) équipé d’un sondeur EK80 (120 kHz) émettant en position verticale, a été développé par l’INRAE en partenariat avec CT2MC. La première version a été validée en lac naturel et la version 2.0 adaptée aux réservoirs nécessite d’être validée.
M
OTS CLES:
HYDRO-
ACOUSTIQUE,
BANC,
ARBRES,
LACS DE BARRAGE,
ACOUSTIQUE LARGE BANDEHydro-acoustique et réservoirs
Validation d’un drone hydroacoustique en réservoir et discrimination de cibles par approche large bande
Rapport Final 2020 Blanluet A., Goulon C., Guillard J.
H
YDROACOUSTICS ANDRESERVOIRS:
H
YDROACOUSTICUSV
VALIDATION IN RESERVOIR AND TARGET DISCRIMINATION BY BROADBAND ACOUSTICS
A
BSTRACTHydro-acoustic has become a requisite method to assess fish populations in lakes and to describe their relationship with the ecosystem. This non-intrusive method is now an integral part of the sampling procedures for fish stock assessment recommended by the WFD and has been standardized by the European Committee for Standardization (CEN EN 1590). As these methods are becoming more and more popular, new needs arise, as the necessity of autonomous acquisition to increase the data temporal and spatial coverage. Moreover, the democratization of broadband acoustics will allow to get closer to species discrimination or to better describe ecosystems by limiting confusions as help the distinction between fish schools and submerged trees. An Autonomous Surface Vehicles (ASV), the HARLE (Hydroacoustic Autonomous boat for Remote fish detections in LakE), equipped with EK80 vertical echo-sounder (120 kHz), was developed by the INRAE in partnership with CT2MC. The first version was already validated in an alpine lake, as the 2.0 version, adapted to reservoirs, need to be validated.
K
EY WORDS:
HYDRO-
ACOUSTIC,
SCHOOLS,
TREES,
DAM LAKES,
BROADBAND ACOUSTICSHydro-acoustiques et réservoirs
Validation d’un drone hydroacoustique en réservoir et discrimination de cibles par approche large bande
Rapport Final 2020 Blanluet A., Goulon C., Guillard J.
S
OMMAIRE1-
Introduction ... 5
2-
Validation version 2.0 du drone ... 7
(a) Rappel des objectifs ... 7
(b) Précision des parcours ... 7
(c) Optimisation des détections en zone de surface ... 17
(d) Détections d’obstacles ... 22
(e) Conclusion sur la validation version 2.0 du drone ... 22
3-
Discrimination arbres – poissons ... 23
(a) Rappel des objectifs ... 23
(b) Jeux de données d’apprentissages ... 23
(c) Préparations des données ... 24
(d) Analyse des données ... 25
(e) Discriminations arbres/bancs ... 26
(f) Conclusion ... 27
4-
Effet de l’angle d’un transducteur sur la réponse acoustique ... 28
Annexes I et II ... 29
Bibliographie ... 41
Table des illustrations ... 42
Table des tableaux ... 43
1-
Introduction
Le besoin de connaissance des populations de poissons en milieux lacustres s’accroit, que ce soit pour la gestion des pêcheries ou pour suivre et étudier l’état des écosystèmes. L’hydroacoustique, développée depuis plusieurs décennies, est reconnue à l’heure actuelle comme étant une méthode de mesure fiable et robuste (Draštík et al. 2017 ; Simmonds and MacLennan. 2005) de ses populations. Si les grands lacs européens sont depuis longtemps suivis par ce type de méthodes, les ouvrages artificiels tels que les lacs de barrages sont généralement peu suivis. Ces masses d’eau présentent un certain nombre de conditions complexifiant les acquisitions :
• Ils sont généralement encaissés, obligeant à recourir à de petites embarcations et à des parcours précis.
• Du fais de l’origine généralement non lacustre des poissons présents (poissons de fleuves et
rivières), l’essentiel de la biomasse est située proche de la surface, plutôt en zone littorale, notamment lorsque le lac est stratifié.
• Dans de nombreux réservoirs, les zones immergées n’ont pas été déboisées, et donc de nombreux arbres sont encore présents, affleurant à la surface ou complètement immergés.
Dans l’objectif de faciliter les acquisitions acoustiques dans des milieux difficiles d’accès, tel que ces lacs de barrages, mais aussi les lacs d’altitudes ou d’autres milieux fragiles, l’UMR CARRTEL (INRAE
- USMB) a développé, en partenariat avec l’entreprise CT2MC, un engin USV autonome, le HARLE
(Hydroacoustic Autonomous boat for Remote fish detections in LakE). Celui-ci est équipé d’un sondeur SIMRAD EK80 WBT-Mini et d’un transducteur 120 kHz. L’utilisation du HARLE et la correspondance des données acquises avec des données de campagne classique ont été validées sur le lac d’Aiguebelette (Goulon et al., under review).
Dans le but d’améliorer ses performances sur les réservoirs, le HARLE a été équipé par la suite d’un autre transducteur de 120 kHz, émettant en mode horizontal, capable d’échantillonner les poissons situés sous la surface, ainsi que d’un GPS plus performant et d’un LIDAR pour la détection d’obstacle. L’objectif des travaux présentés ici est de valider la version 2.0 du drone avec ses évolutions techniques. Cette validation permettra ainsi la mise en œuvre de cet outil dans l’ensemble des écosystèmes lacustres, naturels et artificiels. La validation in situ est un préalable nécessaire à l’utilisation dans des programmes de suivis ou des travaux de recherche.
Les arbres immergés dans les lacs de barrages sont un autre frein aux acquisitions dans ce type d’écosystème, car ils peuvent rendre les processus de nettoyage et de traitements des données difficiles et bien plus incertains, les arbres immergés pouvant être facilement confondus avec des bancs de poissons (Coll et al, 2007). Ce problème est notamment très handicapant dans les grands lacs de barrages tropicaux (Tessier et al, 2016), dont la forêt a été maintenue en place lors du remplissage et quand les acquisitions nocturnes, période où les poissons se dispersent, ne peuvent être faites pour des raisons de sécurité (Tessier et al, 2016).
Le deuxième enjeu de ces travaux est donc de mettre en œuvre des méthodes acoustiques innovantes, utilisant l’acoustique large bande (onde émise modulée en fréquence) pour discriminer arbres immergés des bancs de poissons. Les informations fréquentielles supplémentaires apportées par la modulation en fréquence vont permettre de faire sauter un verrou méthodologique qui a été jusque-là un frein à l’utilisation de ces méthodes dans ce type de milieu.
Dans le cadre de développements méthodologiques et des travaux de normalisation, nous nous sommes également intéressés à quantifier l’effet d’un décalage dans l’angle du transducteur sur les évaluations de stocks de poissons en lac. De tel décalage dans l’angle du transducteur pouvant être fréquent compte tenu de leurs installations temporaires sur des petites embarcations.
2-
Validation version 2.0 du drone
(a) Rappel des objectifs
Valider in situ la version 2.0 du HARLE pour des m ilieu x peu profond ou artificiel (réservoirs, fleuves)
Précision des parcours : mesure du décalage entre parcours théoriques parcours réels Optimisation des détections en zone de surface : positionnement d’un transducteur
émettant horizontalement
Détections d’obstacles : test du LIDAR
Figure 1 : Configuration du HARLE v2
Il est à noter que le transducteur, livré par SIMRAD, prévu initialement pour être positionné horizontalement à présenter un défaut le rendant inopérant (bruit important). Ce bruit était dû aux émissions électromagnétiques des moteurs captées au travers du câble du transducteur, non blindé suite à une erreur de livraison du fabricant. Identifier ce problème à nécessiter de nombreux tests et d’échanges avec ce constructeur avant de renvoyer le transducteur défectueux et d’en obtenir un nouveau. Ce retard, cumulé aux autres problèmes, est à prendre en compte dans le déroulé global de cette action.
(b) Précision des parcours
Lors des premiers tests (avril 2018), le HARLE (V1) a présenté un décalage notable entre sa trajectoire réelle et sa trajectoire théorique. Plusieurs hypothèses ont été avancées pour expliquer ce décalage, comme le fort rayon de courbure du HARLE à pleine vitesse, l’effet du vent et/ou de la houle ou encore la difficulté du HARLE à maintenir un cap, dû à sa conception et donc à sa motorisation. Ces décalages peuvent être particulièrement problématiques dans des milieux présentant de multiples obstacles ou des zones de difficultés. Dans les milieux encaissés, typiquement les gorges des lacs de barrages sur des rivières encaissées, la dégradation du signal GPS peut être aussi source de problème, mais n’a pas été abordée ici.
Dans le but d’atténuer ces décalages avec la trajectoire théorique, il a été décidé de changer le GPS initial pour un GPS plus précis (GPS Trimble) dans la v2 du HARLE. L’effet du changement de GPS sur le décalage trajectoire réelle vs théorique a été testé lors de plusieurs tests. Ces tests avaient comme but de confirmer ou d’infirmer les hypothèses suivantes :
- Le nouveau GPS permet des trajectoires plus précises.
- L’ajout de point d’étapes va atténuer le décalage entre trajectoire théorique et trajectoire effectuée.
- L’effet du vent et/ou de la houle est un facteur important à prendre en considération dans la précision des trajectoires.
(i) Matériels et Méthodes
Ces hypothèses ont été testées en effectuant plusieurs répliquas de trajets triangulaires de différentes tailles, dans le sens horaire ou antihoraire, impliquant un nombre variable de points d’étapes et dans plusieurs conditions météorologiques.
De plus, des tests de parcours longs ont été effectués, en projetant sur le Léman l’itinéraire d’une future campagne sur le Rhône. Le trajet, initialement de 64 points, a été coupé en 2 trajets plus petits, car le constructeur déconseillait d’effectuer des trajets de plus de 50 points.
Les données de sens et de directions du vent proviennent de la station météo du port de l’INRAE
de Thonon-Les-Bains, le mouvement de masses d’eau provient du modèle
http://meteolakes.ch/#!/hydro/geneva.
Les données de positions ont été extraites des données acoustiques. Il faut noter que la version actuelle du logiciel de traitement de données acoustiques généralement employé en eaux douces, Sonar5, est en développement en ce qui concerne la prise en compte des données de l’EK80. Certains bugs ont ainsi été identifiés, comme la confusion des données GPS en mode séquentiel. Ce type de problèmes a généré des vérifications, des interactions multiples avec le concepteur, et au final beaucoup de temps perdu.
(ii) Résultats
Les trajectoires, horaire ou antihoraire, pour chaque condition, sont présentées dans les figures 2, 4, 6 et 8 ainsi qu’en annexes I, pour chaque combinaison taille de triangle/nombre de points d’étape. La distance entre trajectoires théoriques versus trajectoires effectuées est obtenue en calculant sur R (R Core Team, 2020) la plus courte distance entre chaque point de position du drone et la trajectoire théorique. Les histogrammes de la distribution de ces décalages sont présentés, pour chaque combinaison taille de triangle/nombre de points d’étape, en figures 3, 5, 7 et 9, ainsi qu’en annexes I. Le bilan de l’écart moyen/médian/max pour chaque combinaison est présenté dans la table 1. Les données météorologiques sont présentées en table 2, 3, 4 et 5, ainsi qu’en annexe I. Sauf mention contraire, les trajectoires présentées dans ces figures et tableaux ont été effectuées avec le HARLE v2 et son nouveau GPS.
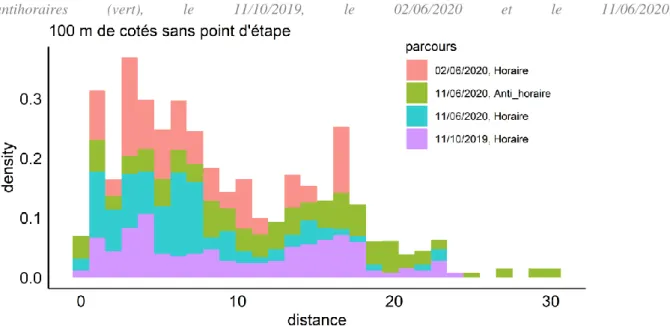
Nous pouvons observer que, même avec le nouveau GPS, les trajectoires du drone sans points d’étapes s’éloignent significativement du trajet théorique, éloignement proportionnel à la distance entre les deux points que le drone doit relier (voir table 1).
Pour un jeu de condition donnée, les trajets du drone sont très similaires d’un répliqua à l’autre, malgré le décalage avec le trajet prévu (par exemple sur figures 2 et 4). Par contre, il y a d’importantes différences, pour les mêmes conditions, entre les trajectoires horaires et antihoraires (figures 2, 4 et 6).
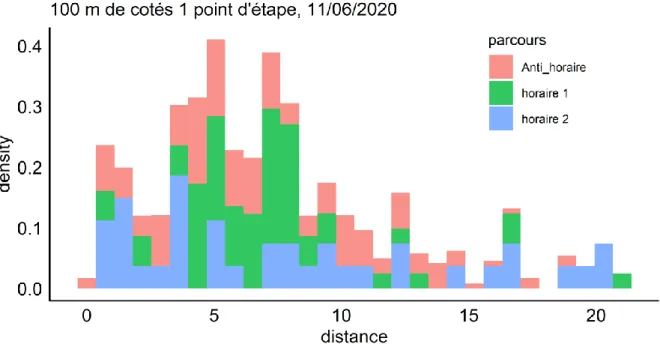
L’ajout de points d’étape, en nombre suffisant (2 et plus), permet de grandement diminuer l’écart entre la trajectoire théorique et la trajectoire effectuée. Néanmoins, l’ajout d’un point d’étape tous les 50 m (Triangle de 100 m de côté, avec un seul point d’étape, figure 6) a eu un effet contre-productif, impliquant des trajectoires circulaires autour d’une partie des points d’étapes.
Le drone s’est arrêté à plusieurs reprises de manière aléatoire sur le trajet long (Rhône projeté), nous poussant, dans les deux répliquas, à arrêter l’essai à la moitié (32 points effectués sur 64). Lors de ses arrêts, le drone a un peu dérivé (notamment sur la trajectoire du 08/07/2020, figure 10), car nous avons attendu de voir s’il repartait. La limite des 50 points imposés par CT2MC ne nous a malheureusement pas permis de tester ces trajectoires avec des points d’étapes.
Tableau 1: Écart moyen/médian/maximum, réel (en m) et relatif (par rapport à la longueur d'un côté du trajet, entre parenthèses) pour chaque combinaison longueur de trajet/nombre de points d'étape. Pour la projection du trajet sur le Rhône, la longueur moyenne d'une section du trajet est de ~75 m. Sauf mention contraire, les trajectoires présentées ici ont été effectuées avec le HARLE v2 et son nouveau GPS.
Longueur du côté du triangle
Nombre de points d’étape
Écart moyen (m) Écart médian (m) Écart max (m)
100 m (GPS v1) 0 8.6 (8.6 %) 6.7 (6.7 %) 26.8 (26.8 %) 100 m 0 10.2 (10.2 %) 9.0 (9.0 %) 30.3 (30.3 %) 100 m 1 7.2 (7.2 %) 6.3 (6.3%) 21.1 (21.1 %) 100 m 2 5.4 (5.4 %) 4.5 (4.5 %) 17.3 (17.3 %) 100 m 3 5.4 (5.4 %) 4.6 (4.6 %) 14.5 (14.5 %) 200 m (GPS v1) 0 23.0 (11.5 %) 19.3 (9.7 %) 65.7 (32.9 %) 200 m 0 10.1 (5.0 %) 8.0 (4.0 %) 54.3 (27.2 %) 200 m 1 7.4 (3.7 %) 5.9 (3.1 %) 28.1 (14,1 %) 750 m 0 68.2 (9.1 %) 72.0 (9.6%) 133.3 (17.8 %) Trajet du Rhône (~ 75 m) 0 14.7 (19.6 %) 10.9 (14.5 %) 51.8 (68.4 %)
1) Triangle de 100 m de côté, sans point d’étape, version 1 du HARLE
Tableau 2 : Conditions météorologiques lors du test du 13/04/2018
Vitesse moyenne du
vent
Direction
moyenne
du vent
Direction
moyenne
du
courant (modèle)
13/04/2018
1.6 m/s
(faible)
Figure 2 : Comparaison entre trajectoires théoriques (noir) d’un triangle de 100 m de côté, sans point d'étape, et de plusieurs répliquas de trajectoires effectuées par le HARLE (v1, ancien GPS), en sens horaires (bleu) et antihoraires (rouge), le 13/04/2018.
Figure 3: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire en rouge et horaire en bleu) par le HARLE (v1, ancien GPS), le 13/04/2018, pour une trajectoire théorique triangulaire de 100 m de côté, sans point d'étape.
2) Triangle de 100 m de côté, sans point d’étape, version 2 du HARLE
Tableau 3 : Conditions météorologiques lors des tests du 11/10/2019, 02/06/2020 et 11/06/2020
Vitesse moyenne du
vent
Direction
moyenne
du vent
Direction
moyenne
du
courant (modèle)
11/10/2019
0.8 m/s
(moyen)
02/06/2020
0.7 m/s
(faible)
11/06/2020
0.6 m/s
(faible)
Figure 4 : Comparaison entre trajectoires théoriques (noir) d’un triangle de 100 m de côté, sans point d'étape, et de plusieurs répliquas de trajectoires effectuées par le HARLE, en sens horaires (rouge, bleu et violet) et
antihoraires (vert), le 11/10/2019, le 02/06/2020 et le 11/06/2020.
Figure 5: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire en vert et horaire en rouge, bleu et violet) par le HARLE, le 11/10/2019, le 02/06/2020 et le 11/06/2020, pour une trajectoire théorique triangulaire de 100 m de côté, sans point d'étape.
3) Triangle de 100 m de côté, avec un point d’étape, version 2 du HARLE
Tableau 4: Conditions météorologiques lors des tests du 11/06/2020
Vitesse moyenne du
vent
Direction
moyenne
du vent
Direction
moyenne
du
courant (modèle)
11/06/2020
0.6 m/s
(faible)
Figure 7: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire en rouge et horaire en vert et bleu) par le HARLE, le 11/06/2020, pour une trajectoire théorique triangulaire de 100 m de côté, sans point d'étape.
Figure 6 : Comparaison entre trajectoires théoriques (noir) d’un triangle de 100 m de côté, avec 1 point d'étape, et de plusieurs répliquas de trajectoires effectuées par le HARLE, en sens horaires (vert et bleu) et antihoraires (rouge), le 11/06/2020.
4) Triangle de 100 m de côté, avec 2 points d’étape, version 2 du HARLE
Tableau 5 : Conditions météorologiques lors des tests du 24/06/2020
Vitesse moyenne du
vent
Direction
moyenne
du vent
Direction
moyenne
du
courant (modèle)
24/06/2020
0.6 m/s
(moyenne)
Figure 8: Comparaison entre trajectoires théoriques (noir) d’un triangle de 100 m de côté, avec 2 points d'étape, et de plusieurs répliquas de trajectoires effectuées par le HARLE, en sens horaires (bleu) et antihoraires (rouge), le 24/06/2020.
Figure 9: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire en rouge et horaire en bleu) par le HARLE, le 11/06/2020, pour une trajectoire théorique triangulaire de 100 m de côté, avec 2 points d'étapes.
5) Trajet du Rhône projeter sur le Léman, version 2 du HARLE
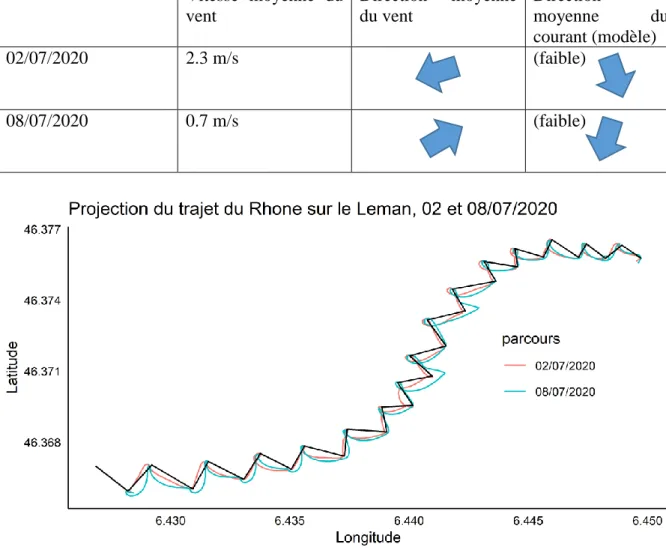
Tableau 6: Conditions météorologiques lors des tests du 02/07/2020 et du 08/07/2020.
Vitesse moyenne du
vent
Direction
moyenne
du vent
Direction
moyenne
du
courant (modèle)
02/07/2020
2.3 m/s
(faible)
08/07/2020
0.7 m/s
(faible)
Figure 10: Comparaison entre trajectoire théorique (noir) du trajet Rhône projeté sur le Léman, sans point d'étape, et des trajectoires effectuées par le HARLE, le 02/07/2020 (rouge) et le 08/07/2020 (bleu).
Figure 11: Histogramme des écarts entre trajectoire théorique du trajet du Rhône sur le Léman et trajectoires effectuées par le HARLE, le 02/07/2020 (rouge) et le 08/07/2020.
(iii) Discussions
La direction et la force du vent ne semblent pas avoir beaucoup d’influence sur la trajectoire du drone : par exemple il y a peu de différence entre les deux itinéraires « Rhône », malgré une puissance et une direction de vent assez différentes. Par contre, le mouvement global de la masse d’eau (i.e. le courant) semble avoir un effet plus important.
Le changement de GPS n’a pas eu l’effet escompté, néanmoins, une amélioration significative du décalage entre les trajectoires prévues et effectuées (environs 50 %) a pu être obtenue en ajoutant des points d’étapes. Une distance de 25/30 m entre deux points pour des trajets où il faut être précis (présence d’obstacles sur le parcours, milieu étroit…) semblent être un bon compromis. Cette distance pouvant être allongée lorsqu’il a peu de risques d’obstacles. Néanmoins, les points d’étape peuvent être contre-productifs si l’angle d’approche est trop fort, le drone tournant autour du point (voir figure 6). Il faut donc essayer d’imposer une trajectoire la plus droite possible au drone pour éviter de tels problèmes. Multiplier les points d’étape peut également être problématique en cas du maintien de la limite à 50 points dans le logiciel.
Le fait que le décalage soit systématique d’un réplica à l’autre, mais qu’il soit affecté par le sens de sa trajectoire (soit horaire, soit antihoraire) montre que ce sont probablement les conditions du milieu telles que la houle ou les courants qui influencent fortement la trajectoire du drone. La direction du vent étant changeante sur le lac, et compilée à l’échelle de la journée, il est difficile de trancher si celui-ci a un véritable impact. Le drone ne prend pas en compte la dérive due aux courants dans le calcul de son cap et tarde à corriger sa trajectoire, augmentant les distances entre parcours théoriques et réalisés. De plus le HARLE ne corrige pas sa trajectoire au fur et à mesure pour être le plus près de la ligne théorique, mais cherche à atteindre le point suivant le plus vite possible, ce qui a tendance à maintenir voir amplifier le décalage provenant du virage initial.
Cet éloignement à la trajectoire théorique et cette sensibilité au courant peut être particulièrement problématique dans des milieux aux abords encombrés, avec des obstacles nombreux, d’autant plus quand ils sont caractérisés par un courant important, comme sur le Rhône.
Les arrêts aléatoires du drone sur des trajets longs sont un problème identifié par CT2MC, mais communiqué de façon partielle par le constructeur. Ceux-ci sont très limitants, arrêtant le drone de manière aléatoire sur des trajets moyens ou longs. Ce problème devrait être réglé par le constructeur dans leur dernière version du logiciel (mise à jours effectuer en août/septembre 2020, des tests ont été faits à l’automne par CT2MC, nous sommes en attente des résultats et du retour du drone pour faire nos propres tests). La prochaine version devrait également améliorer la trajectoire du drone en forçant celui-ci à rester proche de la trajectoire de point à point plutôt que viser directement le point suivant.
Si le problème des arrêts intempestifs entre les points est réglé, le drone sera potentiellement opérationnel pour des plans d’eau tels que le lac d’Aiguebelette, des lacs d’altitude, ou de barrage sans courant (Serre-Ponçon…). Par contre il faudra s’assurer que le courant a un impact faible sur sa trajectoire avant de pouvoir le déployer en eau vive (Rhône…) ou alors prévoir une baisse forte du courant par fermeture des vannes (comme c’est déjà généralement le cas pour les suivis acoustiques sur le Rhône).
(c) Optimisation des détections en zone de surface
Dans un certain nombre d’écosystèmes d’eau douce, notamment en zone peu profonde, une partie importante de la biomasse de poisson ce situe dans les premiers mètres sous la surface (Vašek et al. 2004 ; Goulon et al., 2018). Malheureusement, compte tenu de la zone aveugle des échosondeurs (champ proche de l’échosondeur où la réponse acoustique des cibles présentes n’est pas linaires), cette zone n’est pas échantillonnée par un transducteur placé verticalement. La solution la plus courante pour échantillonner cette zone est donc l’utilisation d’un transducteur orienté horizontalement (voir figure 12).
Un deuxième transducteur ES120-7C a donc été installé à l’avant du HARLE pour insonifier la zone de surface. L’une des questions les plus importantes dans l’installation d’un transducteur émettant en horizontal est son angle par rapport à la surface. Un angle trop faible va grandement limiter sa portée en atteignant vite la surface, tandis qu’un angle fort va perdre une partie de son intérêt en insonifiant vite des zones déjà échantillonnées par le transducteur vertical.
Après du temps perdus dus à la livraison d’un transducteur non adapté (voir section 2 (a)), nous avons pu tester différents angles d’échantillonnages. Les objectifs de ce test étaient de :
• Déterminer le meilleur angle d’orientation du transducteur horizontal
• Calculer la profondeur et la distance au transducteur à partir de laquelle une cible ne peut être plus distinguée de la surface
• Si possible tester dans plusieurs conditions climatiques
(i) Matériels et Méthodes
Ce test a été mis en place de la façon suivante (fig. 13):
Une bille de calibration en tungstène de 38 mm est suspendue sous un flotteur à différentes profondeurs par un fil de pêche fin. Le drone est équipé avec le transducteur monté vers l’avant, avec un angle donné. Celui-ci était piloté manuellement pour se diriger à vitesse réduite dans la direction de la bille, en essayant de la maintenir dans le faisceau (visible sur les échogrammes). Le drone partait d’une distance de 30 à 40 m de la bille et s’arrête au contact du flotteur (fig. 14).
Cette configuration est répétée avec différentes profondeurs de bille (20, 50, 100 et 200 cm) et différents angles de transducteur (0, 2 ou 3.5°). La distance à la bille peut être directement mesurée sur l’échogramme.
Le changement d’inclinaison entre drone immobile et drone en déplacement est suivi à l’aide des données de « pitch » (inclinaison avant) de la centrale inertiel du drone.
(ii) Résultats
Les acquisitions ont beaucoup été bruitées par le sillage du bateau lorsqu’il s’approche de la bille pour changer sa profondeur, ainsi que dans une moindre mesure par le sillage du HARLE lorsqu’il manœuvre (voir échogrammes, figures 16 et 18).
Ces sillages font que la bille n’a pas pu être observée dans toutes les combinaisons d’angle et de profondeur de bille. Notamment, il est difficile à dire si la bille a été observée ou non à 20 cm de profondeur, quel que soit l’angle, à cause de ces échos parasites. Néanmoins, il ne semble pas avoir de différence majeure entre 0° 2° et 3.5° d’angle ainsi qu’entre les différentes profondeurs de billes observées.
Figure 13: Configuration du test de l'angle du transducteur, vu de profil
L’écho de la surface apparaît beaucoup plus éloigné que prévu (>100 m), pour tous les angles, alors que celui-ci devrait assez vite apparaitre à 0° et 2°, voir tableau 7.
Tableau 7 : Distance théorique de l'écho de surface en fonction de l’angle d’orientation du transducteur, pour un transducteur de 7° d’angle d’ouverture situé à 40 cm sous la surface.
Angle 0° 2° 3.5° et plus
Distance théorique de l’écho de surface
6.5 m 15 m >100 m
La centrale d’inertie du drone calcule un pitch important (autour de 4°), à l’arrêt comme en marche. Nous avons tenté de traquer l’écho de la bille pour obtenir des informations sur son TS et sa position dans le faisceau. Malheureusement, due aux nombreuses bulles amenées par le sillage du bateau, la bille n’a pas pu être traquée avec les algorithmes classiques de détections automatiques.
Un algorithme de tracking manuel de SONAR 5 a donc été utilisé pour extraire ses données. Malheureusement, celui-ci mélange les TS de la bille avec le TS de cibles proche, et les données sont difficilement utilisables (voir figures 15 et 17).
Néanmoins, il est à noter que le TS de la bille dans le faisceau n’atteint rarement sa valeur théorique de -39.5 dB et est généralement plus bas.
1) Angle du transducteur : 0°, profondeur de la bille : 50 cm
Figure 16: Position des trackings de la bille sur l'échogramme du transducteur horizontal, pour une bille à 50 cm et un transducteur monté avec un angle de 0°
Figure 15: Relation distance au transducteur/TS (Target Strength) pour chaque tracking de la bille, pour une bille à 50 cm et un transducteur monté avec un angle de 0°. La ligne noire correspond au TS théorique de la bille à 120 kHz.
2) Angle du transducteur : 3.5°, profondeur de la bille : 50 cm
Figure 17: Relation distance au transducteur/TS (Target Strength) pour chaque tracking de la bille, pour une bille à 50 cm et un transducteur monté avec un angle de 3.5°. La ligne noire correspond au TS théorique de la bille à 120 kHz.
Figure 18:Position des trackings de la bille sur l'échogramme du transducteur horizontale, pour une bille à 50 cm et un transducteur monté avec un angle de 3.5°
(iii) Discussion
L’angle réel du transducteur est probablement supérieur à 3.5° pour les trois angles testés (Tableau 7). Cet écart entre angle théorique et angle réel est probablement dû à l’assiette penchée du drone, mais aussi au fait que l’attache du transducteur horizontal n’est pas tout à fait à 0°.
Tout futur test de l’angle du drone devra être effectué après une mesure précise de l’angle initial du transducteur horizontal en condition réelle (fil à plomb, rapporteur). Cet angle mesuré devra être additionné à l’angle théorique.
Le pitch important du drone fait que les mesures faites avec un sondeur orienté vers l’avant du drone ne seront pas comparable avec des mesures de côté .Le protocole est à adapter pour une insonification de côté, malgré la difficulté d’observer la bille à plusieurs distances différentes dans cette configuration. Une solution est à trouver au problème du sillage du bateau, en trouvant un moyen de moins déplacer celui-ci par exemple.
La variabilité du TS de la bille pourrait être due au positionnement de la bille en périphérie du faisceau.
Un problème technique de batterie a limité ces tests à une seule sortie, et d’autres tests seraient nécessaires pour obtenir des résultats de bonne qualité.
(d)
Détections d’obstacles
Un LIDAR a été monté sur le drone par CT2MC pour la détection d’obstacle. Les tests concernant la fiabilité de ce capteur n’ont pas pu être mis en place, celui-ci ne fonctionnant pas durant nos essais. Celui-ci sera retesté après la phase de retour constructeur.
(e) Conclusion sur la validation version 2.0 du drone
Les travaux de validation sur le drone ont pris du retard à cause des différents problèmes techniques, mais aussi des deux mois de confinements. Celui-ci n’est donc encore malheureusement pas opérationnel pour des tests en conditions réelles. D’autres tests sont à prévoir, en particulier concernant les effets de changement logiciel sur les trajectoires, sur l’angle réel du transducteur horizontal, ainsi que sur le LIDAR. Il sera ensuite possible d’organiser des tests grandeur nature, sur le lac de Serre-Ponçon, sur le Léman (suivi de la reproduction de la perche) ou sur le Rhône.
3-
Discrimination arbres – poissons
(a) Rappel des objectifs
Développer une m éthode perm ettant de discrim iner les arbres imm ergés des bancs de poissons en utilisant l’acoustique large bande
Jeux de données d’apprentissage : acquisitions dans différents écosystèmes en large bande (Modulé en Fréquence, FM) et en bande étroite (Onde continue, CW)
Préparations des données : Traitement des données, calibrations
Analyse de données : déterminations de critères permettant la discrimination arbres/poissons Discriminations arbres/bancs : mise en place d’algorithmes de classification permettant de
discriminer arbres de bancs
Rédaction d’un rapport complet et d’article scientifique
(b)
Jeux de données d’apprentissages
Nous avons effectués des acquisitions acoustiques en large bande (Modulé en Fréquence, FM) et en bande étroite (Onde continue, CW)) dans des milieux présentant des arbres et des bancs de poissons pour permettre de construire un modèle les discriminants. Néanmoins, il n’est pas facile d’obtenir sous nos latitudes des lacs présentant à la fois des arbres immergés et des bancs de poissons en quantité suffisante. En Europe occidentale les forêts sont généralement coupées avant immersion, et peu de lacs présentent des arbres immergés. Les acquisitions ont donc été effectuées dans des lacs différents pour les arbres et les poissons :
• Retenu de Chancy-Pougny (Suisse) et de Génissiat (France) sur le Rhône (récent glissement
de terrain ayant entrainé des arbres dans l’eau), ainsi que lac de barrage de Bimont (arbres immergés lors de la mise en place du barrage en 1956) pour les arbres immergés.
• Léman (à deux saisons) et lac du Bourget pour les bancs, constitués en grande partie de bancs
de perche et de gardons, mais sans que la proportion ne soit connue.
Les acquisitions sur ces lacs ont été effectuées en bande étroite et en large bande à l’aide d’un sondeur EK80 WBTMini équipé d’un transducteur de 120 kHz et d’un transducteur de 200 kHz (gracieusement prêté par l’IRD).
Figure 19 : Acquisition sur la retenue de Chancy-Pougny
(c) Préparations des données
Si les calibrations de sondeurs en mode CW sont maintenant des procédures de routine pour les acousticiens (Demer et al 2015), les calibrations en mode FM sont des procédures délicates (Demer et al 2017), la largeur de la bande rendant la calibration beaucoup plus sensible. Ces calibrations nécessitent notamment un soin particulier apporté à l’harnachement de la bille de calibration, qui pourrait avoir un impact sur la calibration du sondeur. Des calibrations mettant en œuvre des billes en tungstène de 22 mm et 38,1 mm de diamètre achetés pour l’occasion et attachés selon les recommandations de Demer et al 2017 et de Laurent Berger (IFREMER) ont donc été effectuées en novembre pour obtenir une qualité suffisante pour ne pas avoir d’impact sur les réponses acoustiques mesurées.
Tableau 8: Configurations des écho-sondeurs
Transducteur ES120-7C ES120-7C ES200-7CD ES200-7CD
Signal CW FM CW FM Largeur de bande (kHz) 120 95-150 200 170-260 Durée d’impulsion (ms) 0.256 1.024 0.256 1.024 Puissance transmise (W) 75 75 75 75 Diamètre de la bille de calibration (mm) 22 22 38.1 22
Les données acoustiques acquises sur les différents lacs ont été prétraitées à l’aide des logiciels HERMES (permettant de convertir les données dans un format lisible par MOVIES3D) et MOVIES3D (effectuant l’analyse spectrale et l’écho-intégration). Ces logiciels, développés par l’IFREMER, sont bien plus adaptés au traitement des données acoustiques FM que la majorité des autres logiciels de traitement de données acoustiques disponibles.
Les échos de bancs et d’arbres immergés ont ensuite été extraits de leurs jeux de données respectifs (fig. 20)
(d) Analyse des données
Deux hypothèses permettant de discriminer arbres et bancs ont été testées sur les jeux de données large bande et bande étroite à notre disposition :
• Les réponses fréquentielles des arbres et des poissons devraient être différentes, plates sur la gamme de fréquence considérée pour les poissons, croissante pour les arbres (en considérant que la réponse acoustique d’un arbre devrait ce rapproché d’une cible « Fluid Like », Stanton et al, 1994).
Figure 20: Procédure d'extractions des bancs sur le lac du Bourget par « écho-intégration » (moyenne de la réponse acoustique par cellule de 0.5m sur deux pings). Les structures acoustiques continues de plus de 12 cellules (i.e. Echotraces) au-dessus d’un seuil de -62 dB sont ensuite extraites.
• La variance interne des arbres devrait être bien plus importante que celle des bancs, notamment dus à la forte différence de densité acoustique entre le tronc et les branches.
Ces deux hypothèses ont été testées en comparant les jeux de données arbres et bancs en utilisant R et MatLab.
Un certain nombre de paramètres énergétiques ont été extraits pour chaque écho-traces (voir tableau 9) pour tester ces hypothèses.
Tableau 9: Listes des paramètres extraits pour l'analyse.
Nom du/des paramètres Unité du/des paramètres
Sv moyen 120 et 200 kHz dB Max Sv – Min Sv 120 et 200 kHz dB Écart type du Sv 120 et 200 kHz dB MVBS moyen dB « Skeness » de la distribution de Sv 120 et 200 kHz NA « Kurtosis » de la distribution de Sv 120 et 200 kHz NA Pente du spectre en fréquence sur la bande du 120 ou du 200 kHz (seulement jeu de données large bande)
NA
(e) Discriminations arbres/bancs
Aucun paramètre ne séparait à lui seul les arbres des bancs, que ce soit en large bande comme en bande étroite. Un algorithme de « Random Forest » a donc été mis en place sur chacun des jeux de données pour tenir compte de l’apport de chacun des paramètres.
Cet algorithme permet d’obtenir un taux de classification de 88.89 % sur un jeu de données indépendant pour le modèle large bande et de 74 % pour le modèle bande étroite (voir tableau 10 et 11 pour les matrices de confusion).
Tableau 10 : Matrice de confusion du modèle de discrimination arbres/bancs en mode bande étroite, en parenthèse le nombre d’individus pour chaque occurrence.
Groupes Arbres prédits Bancs prédits
Arbres 13 (87%) 2 (13%)
bancs 5 (31%) 11 (59%)
Tableau 11 : Matrice de confusion du modèle de discrimination arbres/bancs en mode FM, avec en parenthèse le nombre d’individus pour chaque occurrence.
Groupes Arbres prédits Bancs prédits
Arbres 13 (87%) 2 (13%)
(f) Conclusion
Ces résultats montrent que ces modèles Random Forest discriminent de manière satisfaisante les bancs des arbres, en particulier en mode FM dans nos jeux de données.
L’application de cette méthode à certains grands lacs de barrage, notamment en pays tropicaux, permettrait de faciliter grandement les évaluations de leurs stocks halieutiques. Ces lacs présentent généralement une source non négligeable de protéines pour les populations locales (Tessier et al, 2016), une meilleure connaissance des stocks halieutiques pourrait avoir un impact notable sur la durabilité de la gestion. Nos résultats ne se basent que sur un petit échantillon de lacs, et un jeu de données plus grand sera nécessaire pour pouvoir appliquer notre modèle à grande échelle. Néanmoins notre travail prouve qu’une telle discrimination est possible, et propose un modèle à généraliser. Ce travail fait l’objet d’une publication scientifique en cours de soumission.
4-
Effet de l’angle d’un transducteur sur la réponse acoustique
En milieu lacustre, les conditions parfois difficiles d’installation des équipements d’acoustique (petite taille du bateau, installation de perches temporaires maintenant le matériel…), ne permettent pas toujours de respecter la position du sondeur par rapport à l’horizontale. Un angle dans la position du sondeur induit ainsi une atténuation de l’énergie reçue après réflexion de l’onde acoustique sur un poisson, la réflexion étant directionnelle.
Nous avons encadré un étudiant du master Ecomont (Université Savoie-Mont Blanc) avec comme objectif d’évaluer, sur la base d’une campagne d’échantillonnage par acoustique réalisée sur le lac d’Annecy, l’impact d’un angle de 1 degré dans la position du sondeur par rapport à l’horizontale sur la qualité de détection des poissons, l’estimation de leur taille et de la biomasse piscicole.
Nous en avons conclu que cette différence d’angle avait un petit impact sur les distributions de taille de poisson, mais un impact négligeable sur l’évaluation de biomasse du lac.
Ces résultats ont fait l’objet d’une note technique publiée dans « Journal of Australian Acoustic » (Blanluet et al, 2020, version publiée en annexe II).
Annexe I
1) Triangle de 100 m de côté, avec 3 points d’étape, version 2 du HARLE
Table annexe i: Conditions météorologiques lors des tests du 24/06/2020.
Vitesse moyenne du
vent
Direction
moyenne
du vent
Direction
moyenne
du
courant (modèle)
24/06/2020
0.6 m/s
(moyenne)
Figure annexe i: Comparaison entre trajectoires théoriques (noir) d’un triangle de 100 m de côté, avec 3 points d'étape, et de plusieurs répliquas de trajectoires effectuées par le HARLE, en sens horaires (bleu) et
antihoraires (rouge), le 24/06/2020.
Figure annexe ii: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire en rouge et horaire en bleu) par le HARLE, le 11/06/2020, pour une trajectoire théorique triangulaire de 100 m de côté, avec 3 points d'étapes.
2) Triangle de 200 m de côté, avec 0 point d’étape, version 1 du HARLE
Table annexe ii: Conditions météorologiques lors des tests du 18/04/2018.
Vitesse moyenne du
vent
Direction
moyenne
du vent
Direction
moyenne
du
courant (modèle)
18/04/2018
1.6 m/s
(faible)
Figure annexe iv: Comparaison entre trajectoires théoriques (noir) d’un triangle de 200 m de côté, sans point d'étape, et de plusieurs répliquas de trajectoires effectuées par le HARLE (v1, ancien GPS), en sens horaires (bleu) et antihoraires (rouge), le 13/04/2018.
Figure annexe iii: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire en rouge et horaire en bleu) par le HARLE (v1, ancien GPS), le 13/04/2018, pour une trajectoire théorique triangulaire de 200 m de côté, sans point d'étape.
3) Triangle de 200 m de côté, avec 0 point d’étape, version 2 du HARLE
Table annexe iii: Conditions météorologiques lors des tests du 24/06/2020.
Vitesse moyenne du
vent
Direction
moyenne
du vent
Direction
moyenne
du
courant (modèle)
11/06/2020
0.6 m/s
(faible)
Figure annexe vi: Comparaison entre trajectoires théoriques (noir) d’un triangle de 200 m de côté, sans point d'étape, et de plusieurs répliquas de trajectoires effectuées par le HARLE, en sens horaires (bleu) et antihoraires (rouge), le 11/06/2020.
Figure annexe v : Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire en rouge et horaire en bleu) par le HARLE, le 11/06/2020, pour une trajectoire théorique triangulaire de 200 m de côté, sans point d'étape.
4) Triangle de 200 m de côté, avec 1 point d’étape, version 2 du HARLE
Table annexe iv: Conditions météorologiques lors des tests du 24/06/2020.
Vitesse moyenne du
vent
Direction
moyenne
du vent
Direction
moyenne
du
courant (modèle)
24/06/2020
0.6 m/s
(moyenne)
Figure annexe viii: Comparaison entre trajectoires théoriques (noir) d’un triangle de 200 m de côté, avec 1 point d'étape, et d’un répliqua de trajectoire effectuée par le HARLE, en sens horaires (rouge), le 24/06/2020.
Figure annexe vii: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens horaire) par le HARLE, le 24/06/2020, pour une trajectoire théorique triangulaire de 200 m de côté, avec 1 point d'étape
5) Triangle de 750 m de côté, sans point d’étape, version 2 du HARLE
Table annexe v: Conditions météorologiques lors des tests du 24/06/2020.
Vitesse moyenne du
vent
Direction
moyenne
du vent
Direction
moyenne
du
courant (modèle)
24/06/2020
0.6 m/s
(moyenne)
Figure annexe ix: Comparaison entre trajectoires théoriques (noir) d’un triangle de 750 m de côté, sans point d'étape, et d’un répliqua de trajectoire effectuée par le HARLE, en sens antihoraires (rouge), le 24/06/2020.
Figure annexe x: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire) par le HARLE, le 24/06/2020, pour une trajectoire théorique triangulaire de 750 m de côté, sans point d'étape
Bibliographie
Blanluet, A., Goulon, C., Lebourges-Dhaussy, A., Eymar-Dauphin, P. & Guillard, J. Effect of a Transducer Horizontality Default on Lake Fish Stock Assessment. Acoustics Australia (2020) doi:10.1007/s40857-020-00206-1.
Coll, C. et al. Use and limits of three methods for assessing fish size spectra and fish abundance in two tropical man-made lakes. Fisheries Research 83, 306–318 (2007).
Demer, D. A. et al. USA–Norway EK80 Workshop Report: Evaluation of a wideband echosounder for fisheries and marine ecosystem science. 69 (2017) doi:10.17895/ices.pub.2318.
Demer, D. A. et al. Calibration of acoustic instruments. 133
http://ices.dk/sites/pub/Publication%20Reports/Cooperative%20Research%20Report%20(CRR)/crr32 6/CRR326.pdf (2015).
Draštík, V. et al. Fish hydroacoustic survey standardization: A step forward based on comparisons of methods and systems from vertical surveys of a large deep lake: Fish hydroacoustic survey
standardization. Limnology and Oceanography: Methods 15, 836–846 (2017).
Goulon, C., Westrelin, S., Samedy, V., Roy, R., Guillard, J., & Argillier, C. Complementarity of two high-resolution spatiotemporal methods (hydroacoustics and acoustic telemetry) for assessing fish distribution in a reservoir. Hydroécologie Appliquée, 20: 57–84 (2018)
Goulon, C., Le Meaux, O., Vincent-Falquet, R. & Guillard, J. HARLE (Hydroacoustic Autonomous boat for Remote fish detection in LakE), an unmanned autonomous surface vehicle to monitor fish
population in lakes (under review). Limnology and Oceanography : methods (2020).
R Core Team. R: A Language and Environment for Statistical Computing. (R Foundation for Statistical Computing, 2020).
Simmonds, E. J. & MacLennan, D. N. Fisheries acoustics: theory and practice. (Blackwell Science, 2005).
Tessier, A. et al. Fish Assemblages in Large Tropical Reservoirs: Overview of Fish Population Monitoring Methods. Reviews in Fisheries Science & Aquaculture 24, 160–177 (2016).
Vašek, M. et al. Longitudinal and Vertical Spatial Gradients in the Distribution of Fish within a Canyon-shaped Reservoir. International Review of Hydrobiology 89, 352–362 (2004).
Table des illustrations
Figure 1 : Configuration du HARLE v2 ... 7
Figure 2 : Comparaison entre trajectoires théoriques (noir) d’un triangle de 100 m de côté, sans point d'étape, et de plusieurs répliquas de trajectoires effectuées par le HARLE (v1, ancien GPS), en sens horaires (bleu) et antihoraires (rouge), le 13/04/2018. ... 11
Figure 3: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire en rouge et horaire en bleu) par le HARLE (v1, ancien GPS), le 13/04/2018, pour une trajectoire théorique triangulaire de 100 m de côté, sans point d'étape... 11
Figure 4 : Comparaison entre trajectoires théoriques (noir) d’un triangle de 100 m de côté, sans point d'étape, et de plusieurs répliquas de trajectoires effectuées par le HARLE, en sens horaires (rouge, bleu et violet) et antihoraires (vert), le 11/10/2019, le 02/06/2020 et le 11/06/2020. ... 12
Figure 5: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire en vert et horaire en rouge, bleu et violet) par le HARLE, le 11/10/2019, le 02/06/2020 et le 11/06/2020, pour une trajectoire théorique triangulaire de 100 m de côté, sans point d'étape. ... 12
Figure 6 : Comparaison entre trajectoires théoriques (noir) d’un triangle de 100 m de côté, avec 1 point d'étape, et de plusieurs répliquas de trajectoires effectuées par le HARLE, en sens horaires (vert et bleu) et antihoraires (rouge), le 11/06/2020. ... 13
Figure 7: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire en rouge et horaire en vert et bleu) par le HARLE, le 11/06/2020, pour une trajectoire théorique triangulaire de 100 m de côté, sans point d'étape. ... 13
Figure 8: Comparaison entre trajectoires théoriques (noir) d’un triangle de 100 m de côté, avec 2 points d'étape, et de plusieurs répliquas de trajectoires effectuées par le HARLE, en sens horaires (bleu) et antihoraires (rouge), le 24/06/2020. ... 14
Figure 9: Histogramme des écarts entre trajectoire théorique et trajectoires effectuées (sens antihoraire en rouge et horaire en bleu) par le HARLE, le 11/06/2020, pour une trajectoire théorique triangulaire de 100 m de côté, avec 2 points d'étapes. ... 14
Figure 10: Comparaison entre trajectoire théorique (noir) du trajet Rhône projeté sur le Léman, sans point d'étape, et des trajectoires effectuées par le HARLE, le 02/07/2020 (rouge) et le 08/07/2020 (bleu). ... 15
Figure 11: Histogramme des écarts entre trajectoire théorique du trajet du Rhône sur le Léman et trajectoires effectuées par le HARLE, le 02/07/2020 (rouge) et le 08/07/2020. ... 15
Figure 12: Echantillonnage de la zone de surface par un transducteur horizontal. ... 17
Figure 13: Configuration du test de l'angle du transducteur, vu de profil ... 18
Figure 14: Configuration du test de l'angle du transducteur, vu de haut... 18
Figure 15: Relation distance au transducteur/TS (Target Strength) pour chaque tracking de la bille, pour une bille à 50 cm et un transducteur monté avec un angle de 0°. La ligne noire correspond au TS théorique de la bille à 120 kHz. ... 20
Figure 16: Position des trackings de la bille sur l'échogramme du transducteur horizontal, pour une bille à 50 cm et un transducteur monté avec un angle de 0° ... 20
Figure 17: Relation distance au transducteur/TS (Target Strength) pour chaque tracking de la bille, pour une bille à 50 cm et un transducteur monté avec un angle de 3.5°. La ligne noire correspond au TS théorique de la bille à 120 kHz. ... 21
Figure 18:Position des trackings de la bille sur l'échogramme du transducteur horizontale, pour une bille à 50 cm et un transducteur monté avec un angle de 3.5° ... 21
Figure 19 : Acquisition sur la retenue de Chancy-Pougny ... 24
Figure 20: Procédure d'extractions des bancs sur le lac du Bourget par « écho-intégration » (moyenne de la réponse acoustique par cellule de 0.5m sur deux pings). Les structures acoustiques continues de plus de 12 cellules (i.e. Echotraces) au-dessus d’un seuil de -62 dB sont ensuite extraites. ... 25
Table des tableaux
Tableau 1: Écart moyen/médian/maximum, réel (en m) et relatif (par rapport à la longueur d'un côté du trajet, entre parenthèse) pour chaque combinaison longueur de trajet/nombre de point d'étape. Pour la
projection du trajet sur le Rhône, la longueur moyenne d'une section du trajet est de ~75 m. ... 10
Tableau 2 : Conditions météorologiques lors du test du 13/04/2018 (ancien GPS) ... 11
Tableau 3 : Conditions météorologiques lors des tests du 11/10/2019, 02/06/2020 et 11/06/2020 ... 12
Tableau 4: Conditions météorologiques lors des tests du 11/06/2020 ... 13
Tableau 5 : Conditions météorologiques lors des tests du 24/06/2020 ... 14
Tableau 6: Conditions météorologiques lors des tests du 02/07/2020 et du 08/07/2020. ... 15
Tableau 7 : Distance théorique de l'écho de surface en fonction de l’angle d’orientation du transducteur, pour un transducteur de 7° d’angle d’ouverture situé à 40 cm sous la surface. ... 19
Tableau 8: Configurations des écho-sondeurs ... 24
Tableau 9: Listes des paramètres extrait pour l'analyse. ... 26
Tableau 10 : Matrice de confusion du modèle de discrimination arbres/bancs en mode bande étroite, en parenthèse le nombre d’individus pour chaque occurrence... 26
Tableau 11 : Matrice de confusion du modèle de discrimination arbres/bancs en mode FM, avec en parenthèse le nombre d’individus pour chaque occurrence... 26
Organisme : INRAE UMR CARRTEL Adresse : 75 av. de Corzent, 74203, Thonon
Numéro de téléphone : 0450267800 Site web : www.thonon.inrae.fr