CONCEPTION DES REGLAGES
PAR DES LIAISONS COMPOSEES
parM. GABEr
Professeur L.T.E.,FRESNES, PARIS
Recherchons l'ensemble des solutions isostatiques. Toute étude statique de l'une des pièces isolée conduit à un problème de 6 équations et Ns inconnues statiques de liaison.
j=a
Ns = ~ nsi = nSl +ns2
+ ....
+ nsa j=1Si la solution est isostatique - les actions
mécanlques
de liaison sont donc calculables - le nombre d'équations est égal au nombre d'inconnues statiques. Soit:
Ns = 6
DESIGNATIONS TYPE nc ns
LIAISON
ROTULE LR 3 3
CROQUIS
inconnues statiques de liaison
2 4 LPG degrés de liberté LIAISON PIVOT GLISSANT LIAISON PLANE LPL 3 3 LIAISON L1NEIQUE ANNULAIRE LLA 4 2 LIAISON L1NEIQUE RECTILIGNE LLR 4 2 LIAISON PONCTUELLE LP 5 En constructions mécaniques on est fréquemment
amené à assembler des solides par l'intermédiaire de sur-faces simples obtenues sur machines-outils. Lors de l'usi-nage de ces surfaces, de nombreux défauts apparaissent, et, les assemblages réalisés ne correspondent aux modèles souhaités que dans un certain domaine de tolérances.
Il est intéressant de savoir s'il est possible de maîtriser la répartition des tolérances et d'orienter la conception des assemblages.
En faisant l'hypothèse que chaque surface est parfaite, on détermi ne laposition relative soit des surfaces, soit des éléments assemblés. La valeur des tolérances de position peut donc' conduire:
- soit au choix d'un usinage sur machine-outil parti-culière,
- soit à la modification de l'assemblage et l'utilisation d'éléments intermédiaires réglables.
C'est pourquoi, les notes qui suivent abordent l'étude des solutions permettant:
- une mise en position unique de deux éléments mécaniques assemblés par des liaisons simples et constituant une liaison composée,
- la définition des mouvements relatifs entre ces deux éléments mécaniques lorsqu'on libère successivement chaque liaison simple d'un degré de liberté.
Les domaines d'applications technologiques sont nom-breux: montages d'usinage, montages de composants optiques. C'est à ce dernier domaine qu'est emprunté l'exemple traité au chapitre 3.
1. INVENTAIRE DES SOLUTIONS
Recherchons l'ensemble des solutions isostatiques, non surabondantes et sans mouvement relatif entre deux éléments mécaniques (S) et (S) assemblés par a liaisons simples.
Rappelons d'abord quelques notions essentielles sur les liaisons mécaniques.
Les machlnes-outlls permettent d'engendrer des sur-faces géométriques simples. Elles sont:
le plan .
- le cylindre de révolution, - la sphère.
Il est possible de combiner ces surfaces, puis de les amener en contact, pour réaliser
lesassemblaqes
courants. En assemblant des pièces mécaniques deux à deux de manière qu'une, et une seule, surface d'une pièce soit en contact avec une, et une seule, surface de l'autre pièce, nous obtiendrons l'ensemble des liaisons dites simples.A1 c (1)
(2)
(3)
(4) (5)(6)
A1 b B A1 a 5 fig.2La loi fondamentale de la statique exprime l'équilbre de (S) par la relation:
Si le torseur général d'action directe sur (S) est: Notons qu'un paramétrage plus général pour le centre de la liaison ponctuelle ne changerait rien aux résultats de l'étude.
Isolons (5).
Les torseurs statiques associés aux liaisons simples sont respectivement: { bl lA1 =
{I
~~
1
~
l A1 { b 2 lA2 {ba}=
{ 1RQa/Rma 00 } A3 Rna 0 A3d'où les six équations fondamentales: Xl + X2 + Ria = X YI
+
Y2 + Rma = Y Zl + Z2 + Rna = Z 'Y2 Z2=
L-Rxi
na=
M -Y2 X2 + RXa ma=
Nqu'il faut compléter par la relation:
X2Q2 +Y2m2 +Z2n2
=
0 (7)C'est un système linéaire de
"1
équationsà 7 inconnues (Xl, Yi , Zr , X2, Y2, Z2, R). La valeur du déterminant de . la matrice associée au système linéaire est:2
li
=
-m2Y2XanaD'où son interprétation vectorielle:
li
=-(A1À2.~) [A1À2.(~
A1A3)]Notons que cette interprétation vectorienne est indé-pendante du paramétrage choisi, et, qu'elle permet d'en déduire les conditions d'isostaticité. En effet, si lesactions mécaniques inconnuessontcalculables(la liaison est isosta-tique) le déterminant est non nul.
Analysons et interprétons ces conditions:
--~ .
GD A 1A2.a2=/= 0
Les vecteurs A1A2 et
~
ne doivent pas être perpendiculai-res. Sur les schémas de la figure 2, on montre:- le cas hyperstatique d'ordre 1 (figure a), - deux cas isostatiques (figures b et cl.
A2
~
A2l0
\
\~i
----Limitons nous àl'étude des liaisons composées de trois liaisons simples. Nous en traiterons un exemple dans le paragraphe suivant:
a = 3 => nSl + nS2 + nsa = 6 avec 1~nsi~4
Cela conduit aux solutions ci-dessous:
fig. 1 4+ 1 + 1 - LPG + LP + LP
!
L R + L L R + LPLR+LLA+LP 3+2+1- LPL+LLR+LP LPL+LLA+LPj
L LA + LLA+ LLA LLA+ LLA+ LLR 2+2+2- LLA+LLR+LLR LLR + LLR + LLR Nous avons donc9solutions possibles.Maintenant, il appartient de préciser la position relative des liaisons simples (ou conditions d'isostaticité) pour af· firmer que la liaison composée soit réellement isostatique. Ceci ne peut se déterminer qu'en traitant complètement l'étude statique et en interprétant les résultats. C'est un des buts du paragraphe suivant.
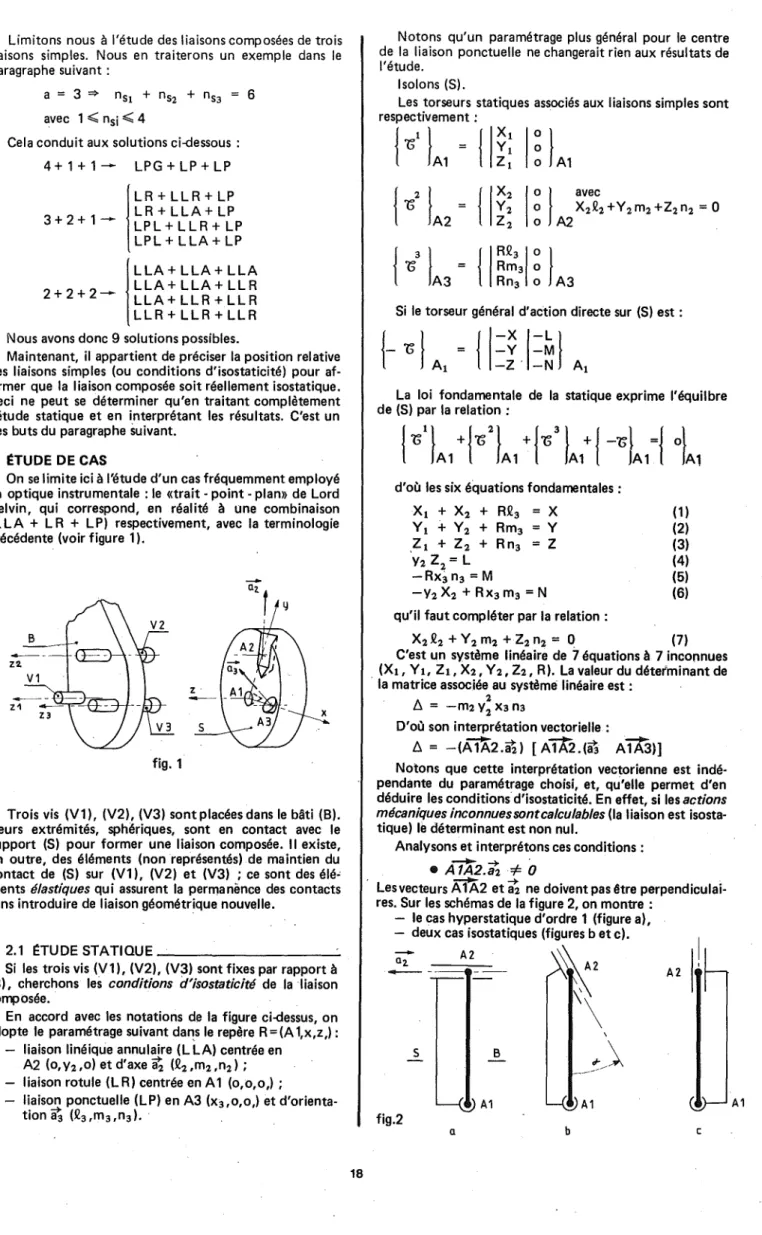
Trois vis (V1), (V2), (V3) sont placées dans le bâti (8). Leurs extrémités, sphériques, sont en contact avec le support (S) pour former une liaison composée. Il existe, en outre, des éléments (non représentés) de maintien du contact de (S) sur (V1), (V2) et (V3) ; ce sont des élé-ments élastiques qui assurent la permanènce des contacts sans introduire de liaison géométrique nouvelle.
2• .:TUDE DECAS
On se limite ici à l'étude d'un cas fréquemment employé en optique instrumentale: le «trait - point -plan»de Lord Kelvin, qui correspond, en réalité à une combinaison (L LA + L R + LP) respectivement, avec la terminologie précédente (voir figure 1).
2.1 ËTUDESTATIQUE _
Si les trois vis (V1), (V2), (V3) sont fixes par rapportà (8), cherchons les conditions d'isostaticité de la liaison
cormosée,
En accord avec les notations de la figure ci-dessus, on adopte le paramétrage suivant dans le repère R
=(A 1,x,z,) :
- liaison Iinéique annulaire (L LA) centrée en A2 (0, Y2'O) et d'axe
ai
(Q2,m2 ,n2) ; - liaison rotule (LR) centrée en A1 (0,0,0,) ;- liaison ponctuelle (LP) en A3 (xa,o,o,) et d'orienta-tion~ (Qa,ma,na). .
Il y a deux surfaces qui jouent le même rôle et empê-chent les mouvements:
- de~nslation suivant A 1A2 si
it3
est parallèle à A1A2,- de ro\?tion autour de A1z si
it3
n'est pas parallèle àA1A2.Remarque: .
L'interprétation technologique du déterminant est très intéressante pour orienter la cotation des dessins de défi-nition. Les conditions d'isostaticité indiquent les toléran-ces de positions relatives qui requièrent
-une
précision élevée; les autresétant-toujours
satisfaites dans le doma ine des usinages courants. Par exemple, les cosinus directeursQ2, ns ,Q3,ms ,n'intervenant pas dans la valeur du déter-minant, peuvent être pris quelconques.
v=JlITl u
=Àl
T1 w=VIT1 a = Y2 ~ = VITl -V3T3 X3 Àl Tl - À2 T2 1= Y2Par analogie, on peut assimiler les déplacements des centres de liaison à des incertitudes de réalisation - ou tolérances dimensionnelles des composants -, ce qui permet de déterminer la position d'une pièce par rapport à un référentiel (montage d'usinage par exemple), et d'orienter le choix des appuis.
Soient les torseurs cinématiques caractérisant: - le mouvement global de (S)par rapport à (B) :
{bt1 ={I
~
1:
lA1 .- le mouvement relatif de la liaison (1) seule:
{b4
fAl={I~:li~~~}
'YI T1vl A1- le mouvement relatif de la liaison (2) seule: {b
2
}
={I~:
1
~2++T;~2}
A2 'Y2 0 +T2v2 A2
- le mouvement relatif de la liaison (3) seule:
{b 3
}
={
1
~: I~:
:
i::}
A3 'Y3 0 +T3v3 A3
En identifiant le torseur cinématique définissant le mouvement global à chaque torseur cinématique carac-térisant les mouvements relatifs de chaque liaison simple, on obtient les équations de comptabilité cinématique. Elles sont: u=T1Àl (1)
v
=T1Jll (2) W=T,lVl (3) u - Y2 1 = T2À2 (4)v
=V2
+
T2Jl2 (5) w+Y2a=T2v2 (6) u = U3 + T3À3 (7) v + X3 1 = V3 +T3Jl3 (8)w -
X3~=T3v3 (9)a, ~,1, u, v et w sont les inconnues cinématiques du problème, et, V2, U3 et V3 des inconnues cinématiques auxiliaires.
Discussion:
.- Certains paramètres n'interviennent pas:1l2,f.l3, À3. Les tolérances de positions relatives associéesà ces para-mètres seront donc très larges.
- En tenant compte des hypothèses précédentes: Ài ~ 1 ; Jli
-e
1 ; Ti ~ 1 ; vi ~ 1 ; Y2 ~ 1 ; X3 ~ 1 Les ÀiTi et JliTi sont donc du deuxième ordre devant les Ài, Jli, Ti et peuvent être négligées si ceux-ci sont en plus petits devant a et~. D'où les possibilités de réglages d'un tel mécanisme:La résolution du système d'équations conduità la solu-tion suivante: V2T2 - VITl fig. 3
-:
.~ 1 1 1 A1 2.2 IËTUDE CINIËMATIQUE _On suppose le support(S) correctement réalisé et satisfaisant les conditions d'isostaticité précédentes.
On trouve simultanément les 3 vis (Vl), (V2), et (V3) ; ce qui provoque des translations Tl, T2 et T3 sur leurs axes respectifs Atzr , A2z2 et .A3Z3. Ces trois axes ne sont pas parallèles à l'axe Alz de la référence (à cause des imperfections d'usinage) et ils ont pour cosinus directeurs
(h, Jll, vd, (À2,Jl2, V2) et (À3,Jl3, V3) respectivement. Les Ài, Jli, vi représentent les tolérances de position relati-ves, et, les Ài et Jli sont petits devant l'unité, et les vi pro-ches de l'unité.
L'étude qui suit permet de déterminer la position de (S) par rapport à (B) dans le cas defaibles déplacements T1, T2 et T3. C'est donc la recherche des possibilités de réglages d'un tel mécanisme ..
Le cas hyperstatique nous précise que pour réaliser l'assemblage, il faut que la dimension A1A2 sur les pièces (S) et (B) soit la même (hyperstatique d'ordre 1 =>une condition géométrique à satisfaire).
L'assemblage est toujours possible si a est différent de 90°.La réalisation est alors isostatique.
Lorsque l'on chercheàeffectuer des mouvements entre (S) et (B), cas des réglages en optique instrumentale, c'est la représentation de la figure c (a = 0) qui est la plus employée. Nous y reviendrons dans le chapitre suivant.
- - -+ - - - - -+
-• (A 1A2,a3,A 1A3) =A1A2. (a3 A1A3)=f:O Les vecteurs A1À2,
t3
et AïA3
ne doivent pas être situés dans un même plan.Si cette expression littérale était nulle, elle traduirait une surabondance de contacts. En effet, si
t3
est contenu dans le plan A 1A2A3, on obtient le cas schématisé, figure 3.fig.7
fig.5
A1: LR ;A2,A3,A4:LP.
3. EXEMPLE D'UNE RI:ALlSATION
On propose ma intenant une solution industrielle per-mettant trois mouvements indépendants de rotation. Cette réalisation tient compte des remarques précédentes. Afin de bien situer l'environnement technologique, nous présenterons succlntement un appareil de laboratoire de très haute précision: l'astrolabe DANJON.
3.1 PRËSENTATION DE L'ASTROLABE DANJON
(ou astrolabe impersonnel) _
L'astrolabe impersonnel est représenté en figure 6: Décrivons sommairement son fonctionnement. Supposons qu'une étoile se trouve dans le plan de la figure, à 30 de-grés de la verticale. Sa lumière tombe normalement sur la base supérieure du prisme puis elle se réfléchit norma-lement sur la face inférieure. Les rayons émergents sont horizontaux. Un second faisceau lumineux peut pénétrer lui aussi dans le prismè, mais par sa face inférieure, après s'être réfléchi sur la surface d'un bain de mercure. Lors-qu'ils émergent du prisme, les rayons de ce second faisceau sont parallèles à ceux du premier, c'est-à-dire horizontaux. Dans la lunette horizontale qui reçoit les deux faisceaux, on voit une seule image de l'étoile, ou plutôtdeux images .exactement superposées.
Mais l'astre ne reste .pas immobile; il estentraînépar le mouvement diurne et la coïncidence de ses images ne se maintient pas. L'une d'elles monte dans le champ tandis que l'autre descend; elles se croisent à l'instant précis ou l'étoile passe à 30 degrés du zénith, l'observation consis-tant à enregistrer l'insconsis-tant. de cette coïncidence sur un chronographe. Si l'on a fait au moins trois observations de ce genre dans des azimuts différents, on peut en déduire à la fois le temps (c'est-à-dire la correction de l'horloge). et la latitude. .
Pour rendre
I'lnstrument
impersonnel et pour assurer une bonne définition optique de la coïncidence, l'astrolabe ,est complété par un prisme biréfringent deWOLL~STON.Ce dernier est réalisé par un assemblage de 3 prismes de cristal de roche, taillés dans le cristal suivant certaines orientations (figure 7). Ce prisme, dont les faces termina-les sont cependant parallètermina-les, a la curieuse propriété de dédoubler un rayon lumineux naturel en deux rayons polarisés faisant entre eux
.un
certain angle. Plaçons-leau
foyer de l'instrument, sur un chariotmicromét~ique pe~
mettant de lui donner un mouvement de translation longi-tudinal parallèlement à l'axe de la lunette. Supposons le
plan
d~dédoublement
des rayons lumineux vertical, etsoient A et Bles deux images d'une même étoile, telles T2 -T1 u -=1= 0 Z
i
a=
yz 1 T1 -T3 v-=l=O {3=
X3A1: LR;A2,A3, A4:LP",
fig.
4
Si l'on remarque que deux liaisons ponctuellesfo~":,ent une llalsonllnélque annulaire, on retombe sur la liaison initiale trait-point-plan légèrement modifiée (voir figure 5).
Remarques:
a) Sur cet exemple de ·liaison composée de trois liaisons simples: rotule (ns=3)
Iinéique annulaire (ns= 2) ponctuelle (ns= 1)
on se rend compte que la difficulté d'obtention de
régla-ges indépendantsvie~t.: . '
- en premier, de la liaison rotule, car Tl agit dans lestrois directions (doncT1doit être nulle),
en second, de la liaison linéique annulaire car T2 agit dans deux directions (d'oùleschoix deÀzetyz). Ces liaisons ont un degré statique supérieuràun. Ce qui permet de dire que la liaison ponctuelle est supérieure à toutes les autres liaison~ simples ~ans ce domaine car elle n'agit que dans une direction suivant la normale au plan. D'où
lil
possibilité de choisir la direction de réglage au moment de la conception.On raisonnera de même dans le cas d'un montsa« d'usinage.b) En prenant appui sur les remarques précédentes, si l'on désire obtenir trois mouvements de réglage indépendant, il faut nécessairement trois liaisons ponctuelles. Pour compléter la liaison composée, Ns
=
6, llfaut
y adjoindre une quatrième liaison simple: une liaison rotule. . La figure4 donne une solution qui permet trois solutions indépendantes autour des axes A1x, Aly et A 1z :'Y
#
0 w = T1On voit qu'il est possible d'avoir deux mouvements de . réglages indépendants si T1
=0, soit:
T2 T3
a = - et {3 =
-yz X3
Si l'on tient compte des imperfections, en réalité on obtient:
u
=
v=
w=
0 car T1=
0vzT2 V3T3 ÀzT2
a= { 3 = - - - , 'Y=
yz
X3yz
Si l'on désire toujours un réglage indépendant sur
a,
il est absolument nécessaire de choisir Àz le plus petit possible (au niveau de la conception et de la réalisation).
qu'on les verrait si le wollaston n'existait pas (figure 8) ; chacune d'elle est dédoublée, l'image A étant remplacée par les images C et D, l'image Bpar E et F.En réglant convenablement la position du wollaston, on peut amener les images D et E à coïncider, et cette coïncidence peut être maintenue aussi longtemps qu'il est nécessaire par un déplacement continu du chariot micrométrique. La vis qui l'entraîne porte une roue de contacts reliéeà un chronographe, lequel enregistre automatiquement et
jrnperscnnellerrent le mouvement du prisme biréfringent. fig. 8
o
i
j 1 figure 6 Coupe d'ensemble de l'astrolabe DANJON 5 23 - - i r - - - j213.2 SOUS-ENSEMBLE PRISME _ La figure 9 ci-dessous représente très schématiquement une partie de l'astrolabe.
Coupe BB
figure 9
Détail schématique de l'astrolabe Ëchelle 0,15
Coupe Oy
La rigueur des phénomènes observés par l'astrolabe nécessite une position rigoureuse des composants opti-ques dans le corps (1) de l'appareil. En conséquence, l'objectif est réglé au montage, et, la mise en position du prisme est faite au début de la manipulation par les boutons (3), (4) et (5).
Un choix judicieux des liaisons mécaniques en A, B et C permet des mouvements de réglages fins entre (2) et (1), le prisme (6) étant lié rigidementà (2). Pour éviter les efforts parasites et un réglage- trop long, les boutons de commande (3), (4) et (5) sont munis d'un dispositif qui limite le nombre de tours à 4, 4 et 20 respectivement. La figure 10 représente la réalisation de la liaison entre le corps (1) et le support du prisme (2).
Coupe CC
2
Coupe AA
figure