Étude de l’interaction sol-structure au site instrumenté
de Garner Valley, Californie
Mémoire
Pierre Guillery
Maîtrise en génie civil
Maître ès sciences (M. Sc.)
Québec, Canada
II
Étude de l’interaction sol-structure au site instrumenté de Garner
Valley, Californie
Mémoire
Pierre Guillery
Sous la direction de :
Charles-Darwin Annan, directeur de recherche
Denis Leboeuf, codirecteur de recherche
III
Résumé
Le site de Garner Valley, Californie, est un site dont l’instrumentation est sismique, géotechnique et structurelle. Les enregistrements effectués sur la structure test du site permettent d’étudier l’interaction sol-structure. Il s’agit du phénomène qui différencie la réponse d’une structure réelle – reposant sur un sol flexible – et celle de la structure où la fondation est idéalisée comme rigide et reposant sur un sol également rigide.
Dans le but de mettre en œuvre l’analyse de l’interaction sol-structure sur le site de Garner Valley via la méthode des sous-structures, les paramètres géotechniques nécessaires à la constitution de la fonction d’impédance de la fondation sont étudiés par analyse paramétrique de la réponse d’une colonne de sol uni-axiale par modèle linéaire équivalent à partir des données sismiques et géotechniques de terrain.
La réduction de module de cisaillement G/Gmax et l’amortissement hystérétique du sol 𝛽𝑆 ainsi trouvés permettent en association aux données géométriques et géotechniques de constituer les équations des ressorts et amortisseurs qui sont utilisés en fonction d’impédance pour la constitution du modèle d’analyse par méthode des sous-structures. La taille réduite de la fondation permet l’hypothèse d’absence de rotation et torsion. Les ressorts sont alors implantés verticalement et horizontalement. L’analyse de l’interaction cinématique est effectuée : malgré la taille réduite de la fondation et les différences mineures entre Free Field Motion et Foundation Input Motion, les effets sont notoires avec une baisse de l’accélération maximale de la structure. La baisse majeure de l’accélération maximale de la structure calculée en prenant compte l’interaction sol-structure correspond aux données de terrain. Les effets typiques de l’interaction inertielle - allongement de la période et augmentation de l’amortissement - sont par ailleurs observés et comparés à des résultats théoriques.
IV
Abstract
The Garner Valley site in California is a seismic, geotechnical and structural instrumented site. The structural recordings on the test structure provides data for soil-structure interaction studies. Soil structure interaction is the phenomenon that differentiate the response of a structure based on an perfectly rigid foundation within a perfectly rigid soil, from the response of a structure in reality.
In order to analyse soil-structure interaction effects on the Garner Valley test structure, using the substructure analysis method, geotechnical and structural parameters which are necessary for the constitution of the foundation impedance function are analysed by a dynamic parametric analysis of the soil column under seismic load, using uniaxial linear equivalent model, from seismic and geotechnical in-situ data.
The shear modulus reduction and hysteretic damping of the soil are therefore found and can be used in combination with geometrical and geotechnical data to calculate the springs and dashpots equations, used as solutions for the foundation impedance function needed in the substructure approach. The small size of the foundation at Garner Valley allows the non-rotational and non-torsional foundation hypothesis. Springs and dashpots are then implemented in addition of the fixed base model, horizontally and vertically. Kinematic interaction is also studied, even though the foundation size is small and the difference between foundation input motion and free field motion are minimal, the use of foundation input motion as input reduces maximum acceleration on top of the structure. This reduction matches the in-situ levels of maximum acceleration when the foundation is flexible, using springs and dashpots. The results of inertial interaction, period lengthening and damping increase, are also noticed, and compared to theoretical results.
V
Table des matières
RÉSUMÉ ... III ABSTRACT ... IV TABLE DES MATIÈRES ... V LISTE DES TABLEAUX ... IX LISTE DES FIGURES ... XI LISTE DES SIGLES ... XV LISTE DES SYMBOLES ... XVII DÉDICACE ... XXI REMERCIEMENTS ... XXIII 1. INTRODUCTION ... 1 1.1 Mise en contexte ... 1 1.2 Problématique ... 3 1.3 Objectifs ... 4 1.4 Méthodologie ... 5 1.5 Organisation du mémoire ... 6 2. REVUE DE LITTÉRATURE ... 9
2.1 Interaction sol structure ... 9
2.2 Interaction inertielle et interaction cinématique ... 10
2.2.1 Interaction Inertielle ... 10
2.2.2 Interaction cinématique ... 11
2.3 Étude simple et effets principaux de l’interaction sol structure ... 11
2.4 Méthode de résolution ... 13
2.4.1 Méthode directe / globale... 14
2.4.2 Méthode des sous-structures ... 15
2.4.3 Méthodes non-linéaires ... 17
2.5 Conséquences de l’Interaction sol-structure ... 24
2.5.1 Paramètre influant sur l’allongement de la période et le facteur d’amortissement ... 24
2.5.2 Conséquence de l’allongement de la période et d’augmentation de l’amortissement... 27
2.6 Conclusion partielle ... 29
3. DESCRIPTION DU SITE INSTRUMENTÉ DE GARNER VALLEY ... 31
3.1 Objectif ... 31
3.2 Historique et localisation ... 31
3.3 Structure et instrumentation ... 33
3.4 Campagnes d’essai ... 35
3.5 Description géologique du site ... 36
3.6 Travaux d’investigations géotechniques ... 38
VI
3.6.2 Poids volumique ... 42
4. RÉPONSE DYNAMIQUE GÉOTECHNIQUE ... 43
4.1 Objectifs ... 43
4.2 Plan expérimental ... 43
4.3 Sélection d'évènements sismiques et traitement des données ... 46
4.4 Logiciel ProShake et modèle linéaire équivalent ... 49
4.5 Modèle de base et paramètres étudiés ... 53
4.5.1 Influence du niveau d’eau ... 54
4.5.2 Strain Ratio ... 55
4.5.3 Influence de l’outcrop (affleurement) ... 55
4.5.4 Différents profils Vs ... 56
4.5.5 Modèles d’atténuation G/Gmax et d’amortissement ... 57
4.5.6 Explicitation du modèle de base M1 ... 63
4.5.7 Récapitulatif des simulations de l’étude paramétrique ... 67
4.6 Résultats M1 à M12 ... 69
4.7 Analyse et discussions ... 78
4.8 Conclusion partielle ... 79
4.8.1 Résumé ... 79
4.8.2 Réduction de module et amortissement ... 80
5. RÉPONSE DYNAMIQUE DU SYSTÈME SOL-STRUCTURE ... 87
5.1 Objectifs ... 87
5.2 Méthodologie ... 88
5.2.1 Structure SFSI et instrumentation sur le site GVDA ... 88
5.2.2 Plan expérimental ... 91
5.3 Développement des ressorts et amortisseurs de fondation ... 94
5.3.1 Théorie ... 94
5.3.2 Développement des ressorts et amortisseurs ... 96
5.4 Modélisation SAP2000 ... 103
5.4.1 Considérations structurelles ... 103
5.4.2 Contraintes et conditions aux limites ... 103
5.4.3 Implantations et distribution des ressorts et amortisseurs ... 105
5.5 Résultats T1 à T4 et observations ... 107 5.5.1 Simulation T1 ... 107 5.5.2 Simulation T4 ... 109 5.5.3 Simulation T2 ... 111 5.5.4 Simulation T3 ... 112 5.6 Analyse et discussion ... 114 5.6.1 Interaction Inertielle ... 114 5.6.2 Interaction cinématique ... 120 5.6.3 Analyses spectrales ... 122 5.7 Extension de l’étude ... 125
5.7.1 Implantation de raideurs rotationnelles ... 125
VII
5.8 Incertitudes et conclusion partielle ... 129
6. CONCLUSION... 133
6.1 Résumé ... 133
6.2 Recommandations et travaux futurs ... 134
RÉFÉRENCES ... 137
ANNEXES ... 145
ANNEXE I : STRATIGRAPHIE GÉOLOGIQUE DU SITE DE GVDA ... 147
ANNEXE II : CALCULS DES VALEURS VS PAR LES RÉSULTATS DES SPT ... 153
ANNEXE III : RÉSULTATS DES ANALYSES PROSHAKE ... 155
IX
Liste des tableaux
Tableau 3-1: Liste des capteurs géotechniques sur le site de GVDA (adapté de Yin et al.,
2016) ... 34
Tableau 3-2 : Valeurs (N1)60 ... 41
Tableau 3-3 : Valeurs des masses volumiques totales au site de GVDA (adapté de Steidl et al, 1998) ... 42
Tableau 3-4 : Valeurs standards de poids volumique (communications de D. Leboeuf, 2016) ... 42
Tableau 4-1 : Séismes notoires de la base de données NEES ... 46
Tableau 4-2 : Caractéristiques des séismes A et B ... 48
Tableau 4-3 : Modèle de base M1 ProShake ... 64
Tableau 4-4 : Courbe de réduction de module pour le modèle de base M1 - en référence à Seed et Idriss (1970) pour le modèle et à Seed et al. (1986) pour les résultats de Stokoe et Darendeli (1998) ... 65
Tableau 4-5 : Damping curve pour le modèle de base M1 - en référence à Seed et Idriss (1970) pour le modèle de Seed et al. (1986) pour les résultats de Stokoe et Darendeli (1998) ... 66
Tableau 4-6 : Tableau récapitulatif des différentes simulations ... 67
Tableau 4-7 : Modèle M1 : caractéristiques de la réponse EW ... 72
Tableau 4-8 : Modèle M1 : caractéristiques de la réponse NS ... 72
Tableau 4-9 : Comparaison des résultats des analyses ProShake - EW ... 74
Tableau 4-10 : Comparaison des résultats des analyses ProShake - NS... 75
Tableau 4-11 : Classification des sites selon ASCE-2010 ... 83
Tableau 4-12 : Valeurs standards de réduction de module par ASCE (ASCE, 2010) et FEMA (FEMA, 2009) - (NEHRP, 2012) ... 84
Tableau 5-1 : Liste complète des capteurs de la structure SFSI (NEES, 2004) ... 91
Tableau 5-2 : Plan expérimental ... 92
Tableau 5-3 : Paramètres de calcul ... 98
Tableau 5-4 : Raideur statique Kj - équations ... 99
Tableau 5-5 : Équations de calcul des coefficients dynamiques α𝑗 ... 100
Tableau 5-6 : Résultats des calculs de raideur dynamique de la fondation ... 101
Tableau 5-7 : Équations de calcul de l'amortissement radiatif ... 101
Tableau 5-8 : Résultats des calculs de raideur dynamique de la fondation ... 102
Tableau 5-9 : Résultats des simulations - accélérations maximales ... 115
Tableau 5-10 : Écarts des accélérations maximales des simulations SAP par rapport aux maxima de T0 ... 115
Tableau 5-11 : Écarts des maxima entre input FFM et input FIM ... 120
Tableau 5-12 : Extension de l'étude ... 125
Tableau 5-13 : T3bis - raideurs statiques rotationnelles ... 126
Tableau 5-14 : T3bis - coefficients dynamiques rotationnels ... 126
Tableau 5-15 : T3bis - amortissement radiatif rotationnel ... 127
XI
Liste des figures
Figure 1-1 : Méthodologie de l'étude ... 6
Figure 2-1 : Principe de l'interaction-sol-structure (Pecker, 2008) ... 10
Figure 2-2 : Illustration schématique des effets de la prise en compte de l'interaction sol-structure (adapté NEHRP, 2012) ... 11
Figure 2-3 : Illustration de la méthode globale (NEHRP, 2012) ... 14
Figure 2-4 : Illustration schématique de la méthode des sous-structures (NEHRP, 2012) 16 Figure 2-5 : Élément BNWF (NEHRP, 2012) ... 17
Figure 2-6 : Ressort type du modèle (Gajan et al., 2008) ... 18
Figure 2-7 : Modèle OpenSees BNWF pour un bâtiment (B) de 4 étages (Gajan et al., 2008) ... 20
Figure 2-8 : Illustration du fonctionnement d'un macroélément pour le Contact Interface Model (CIM) (NEHRP, 2012)... 21
Figure 2-9 : CIM a) longueur critique de contact et moment ultime b) modèle d’interface de contact pour un chargement cyclique en moment (NEHRP, 2012) ... 22
Figure 2-10 : Modèle OpenSees CIM pour un bâtiment de 4 étages (NEHRP, 2012) ... 23
Figure 2-11 : Comparaison des allongements de période et d'amortissement en fonction de paramètres influant (Mylonakis et Gazetas, 2000) ... 26
Figure 2-12 : Comparaison d'un spectre de réponse typique et de spectres de réponse réels ... 28
Figure 2-13 : Réduction des contraintes de cisaillement avec les effets de l'interaction sol-structure - NEHRP-97 ... 28
Figure 2-14 : Effets de l'interaction sol structure - généralités (Kramer et Stewart, 2004). 29 Figure 3-1 : Géolocalisation du site de Garner Valley (tiré de Gogle Earth) ... 31
Figure 3-2 : Localisation du site GVDA dans le sud de la Californie sur une cartographie du risque sismique pour 10% d’augmentation du PGA (g) (Steidl et al., 2004) ... 32
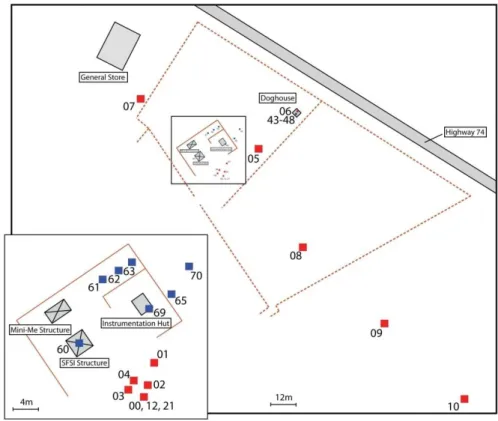
Figure 3-3 : Instrumentation du site de Garner Valley Downhole Array – GVDA (adapté de Yin et al., 2016) ... 34
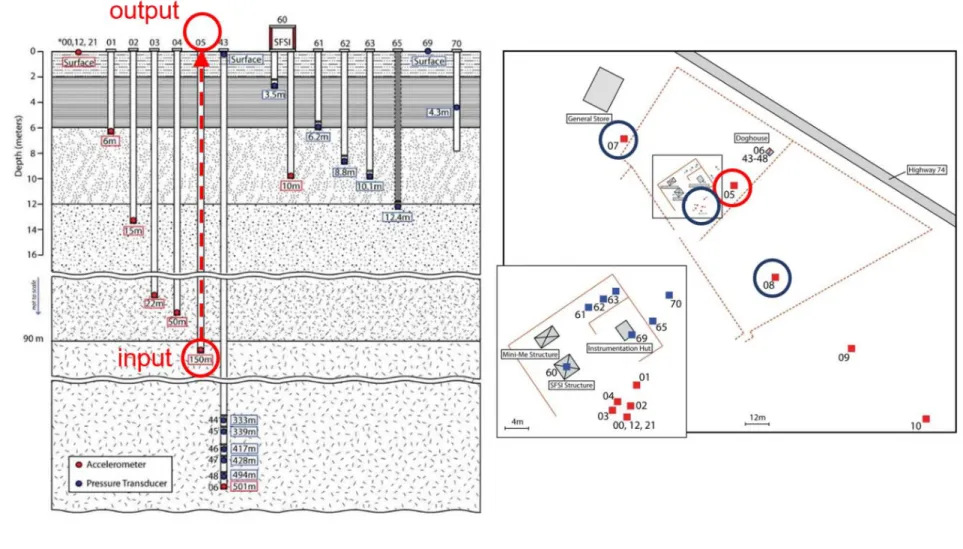
Figure 3-4 : Coupe stratigraphique des capteurs géotechniques présents (disponible sur www.nees.ucsb.edu/files/facilities/gvda/ - dernièrement consulté en octobre 2016) ... 35
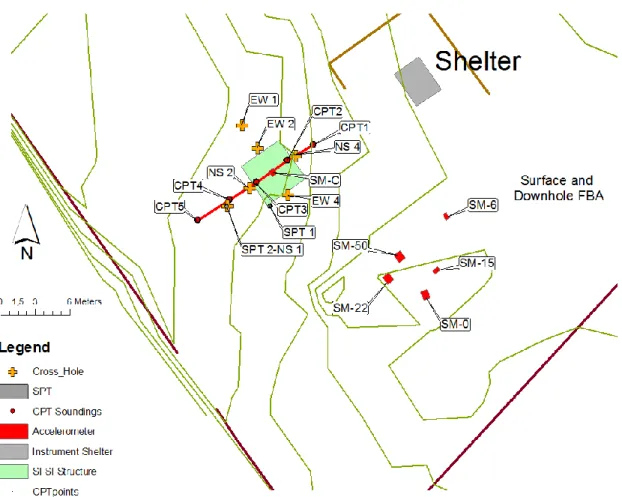
Figure 3-5 : Plan du site de GVDA mentionnant la localisation des campagnes d'essai (Star et al., 2015) ... 37
Figure 3-6 : Plan du site de GVDA mentionnant la localisation des campagnes d'essai (ArcGIS) ... 37
Figure 3-7 : Profil de Vs sur le site de GVDA ... 39
Figure 3-8 : (N1)60 en fonction de la profondeur sur SPT1 ... 40
Figure 3-9 : Vs calculé et Vs des données de terrain ... 41
Figure 4-1 : Plan expérimental pour l'étude de la réponse dynamique géotechnique du site de GVDA ... 43
Figure 4-2 : Méthodologie de l'étude de la réponse dynamique géotechnique de GVDA . 45 Figure 4-3 : Accélération dans l’axe Nord-Sud, capteur 00 en cm/s2 Séisme A ... 47
XII
Figure 4-4 : Accélération NS capteur 00 en cm/s2 Séisme B ... 47
Figure 4-5 : Comportement hystérétique du sol sous un cycle de chargement-déchargement ... 50
Figure 4-6 : Exemple d'itération pour l'analyse en modèle linéaire équivalent (Hashash et al. 2010) ... 53
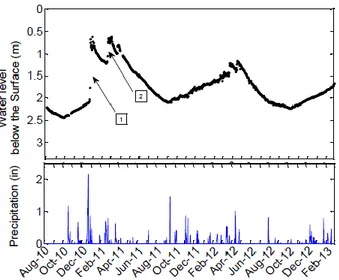
Figure 4-7 : Niveau d'eau et précipitations entre aout 2010 et février 2013 sur le site de GVDA ... 54
Figure 4-8 : Bedrock motion et outcrop motion (Kramer, 1996) ... 56
Figure 4-9 : Profil Vs et zones de transition à préciser ... 57
Figure 4-10 : Courbe de réduction de module - via essai à la colonne résonnante pour des spécimens de sol de GVDA à différentes profondeurs (Stokoe et Darendeli, 1998) ... 59
Figure 4-11 : Courbe de réduction de module - via essai de torsion pour des spécimens de sol de GVDA à différentes profondeurs (Stokoe et Darendeli, 1998) ... 59
Figure 4-12 : Courbe de réduction de module – GVDA(3,5m) [croix] par rapport à Seed et Idriss (1970) [vert : lower – rouge average] ... 60
Figure 4-13 : Courbe d'amortissement – GVDA (3,5m) [croix] – par rapport à Seed et Idriss (1970) [vert : lower – rouge average] ... 61
Figure 4-14 : Courbe d’amortissement - via essai à la colonne résonnante pour des spécimens de sol de GVDA à différentes profondeurs (Stokoe et Darendeli, 1998) ... 62
Figure 4-15 : Courbe d’amortissement - via essai de torsion pour des spécimens de sol de GVDA à différentes profondeurs (Stokoe et Darendeli, 1998) ... 62
Figure 4-16 : Variation des profils Vs ... 68
Figure 4-17 : Modèle M1 Response Spectrum EW - 5% ... 69
Figure 4-18 : Modèle M1 Spectre de Réponse NS - 5% ... 69
Figure 4-19 : Modèle M1 Spectre de Fourrier – EW ... 70
Figure 4-20 : Modèle M1 Spectre de Fourrier – NS ... 70
Figure 4-21 : Modèle M1 Accélérogramme EW ... 71
Figure 4-22 : Modèle M1 Accélérogramme NS ... 71
Figure 4-23 : Modèle M3 - Spectre de Fourrier EW ... 73
Figure 4-24 : Modèle M3 - Accelerogramme EW ... 73
Figure 4-25 : Modèle M12 – spectre de réponse EW ... 77
Figure 4-26 : Modèle M12 - spectre de réponse NS ... 77
Figure 4-27 : Modèle M12 - accélérogramme EW ... 78
Figure 4-28 : Modèle M12 - accélérogramme NS ... 78
Figure 4-29 : Output 1 : réduction de module EW ... 80
Figure 4-30 : Output 1 : réduction de module NS ... 81
Figure 4-31 : Output 2 : amortissement hystérétique EW ... 81
Figure 4-32 : Output 2 : amortissement hystérétique (%) NS en fonction de la profondeur (m) ... 82
Figure 4-33 : Carte de design USGS pour le site GVDA ... 83
Figure 4-34 : Valeur G/Gmax en fonction de la profondeur... 85
XIII
Figure 5-2 : Plan et élévation de la structure SFSI sur le site de GVDA (Tileylioglu et al.
2011) ... 89
Figure 5-3 : Instrumentation de la structure SFSI sur GVDA (NEES, 2004) ... 90
Figure 5-4 : Schéma d'une fondation superficielle (Tileylioglu, 2011) ... 93
Figure 5-5 : Semelles des fondations – schéma ... 98
Figure 5-6 : Modélisation de la structure sur SAP2000 ... 104
Figure 5-7 : Éléments LINK aux joints de la dalle inférieure (dalle flexible) ... 106
Figure 5-8 : T1 – accélération NS (cm/s2) en fonction du temps (s) ... 107
Figure 5-9 : T1 – accélération EW (cm/s2) en fonction du temps (s) ... 108
Figure 5-10 : T4 – accélération NS (cm/s2) en fonction du temps (s)... 109
Figure 5-11 : T4 – accélération EW (cm/s2) en fonction du temps (s) ... 110
Figure 5-12 : T2 – accélération EW (cm/s2) en fonction du temps (s) ... 111
Figure 5-13 : T2 – accélération NS (cm/s2) en fonction du temps (s)... 112
Figure 5-14 : T3 – accélération NS (cm/s2) en fonction du temps (s)... 113
Figure 5-15 : T3 – accélération EW (cm/s2) en fonction du temps (s) ... 114
Figure 5-16 : Amortissement de la fondation (adapté de Tileylioglu, 2011) ... 117
Figure 5-17 : Tracé des relations entre allongement de la période et amortissement de la fondation (adapté de FEMA, 2009) ... 119
Figure 5-18 : Fonction de transfert H ... 121
Figure 5-19 : Spectres de Fourier - EW et NS - T0 et T3 ... 122
Figure 5-20 : Spectres de Fourier - EW et NS – dalle supérieure - T0 / T1 ... 123
Figure 5-21 : Spectres de réponse - EW et NS - dalle supérieure - T0 / T1 / T3 ... 124
Figure 5-22 : Tracé des relations entre allongement de la période et amortissement de la fondation – T3bis (adapté de FEMA, 2009) ... 129
XV
Liste des sigles
ASCE American Society of Civil Engineering
ATC Applied Technology Council
BNWF Beam on Non-linear Winkler Foundation
CEISCE Centre d’Études Interuniversitaires des Structures sous Charges Extrêmes
CIM Contact Interface Model
CNRC Conseil National de Recherches Canada
CPT Cone Penetration Test
EW East West
FEMA Federal Emergency Management Agency
FFM Free Field Motion
FIM Foundation Input Motion
GVDA Garner Valley Downhole Array
ISS Interaction-sol-structure
NEES Network for Earthquake Engineering Simulation
NEHRP National Earthquake Hazards Reduction Program
NS North South
PGA Peak Ground Acceleration
SASW Spectral analysis of Surface Waves
SFSI Soil Foundation Structure Interaction (structure test de GVDA)
SPT Standard Penetration Test
UCSB University of California San Barbara
USNRC United States Nuclear Regulatory Commission
ZT1 Zone de Transition 1
XVII
Liste des symboles
1 𝜎⁄ Paramètre sans dimension « structure-to-soil stiffness »
𝑎0 Paramètre fréquentiel sans dimension
𝛼𝑗 Paramètre de modification dynamique
𝐴𝑐𝑦𝑐𝑙𝑒 Aire du cycle d’hystérésis
𝐵 Demi-largeur de la fondation
𝛽𝑖 Amortissement de la structure
𝛽0 Amortissement avec SSI
𝛽𝑟 Amortissement radiatif
𝛽𝑓 Amortissement de la fondation
𝛽𝑠 Amortissement hystérétique
𝑐 Coefficient d’amortissement
𝐶𝑁 Coefficient correcteur de surcharge
𝑒 Enfouissement 𝐸𝑒𝑓𝑓 Énergie efficace 𝐸𝑚 Énergie 𝜂 Coefficient dynamique 𝐹 Force appliquée 𝐺 Module de cisaillement
𝐺𝑚𝑎𝑥 Module de cisaillement maximal
𝐺𝑠𝑒𝑐 Module de cisaillement sécant
𝑔 Constante de gravité
𝛾𝑒𝑓𝑓 Déformation efficace
𝛾𝑚𝑎𝑥 Déformation maximale
XVIII
ℎ Hauteur
𝐻 Fonction de transfert cinématique
𝐼𝑜 Fonction de Bessel – ordre 0
𝐼1 Fonction de Bessel – ordre 1
𝑘 Raideur globale
𝑘𝑗 Fonction d’impédance de la fondation suivant l’axe j
𝑘𝑗 Raideur dynamique de la fondation selon l’axe j
𝑘𝑗𝑗 Raideur dynamique de la fondation autour de l’axe j 𝐾𝑗 Raideur statique de la fondation selon l’axe j
𝐾𝑗𝑗 Raideur statique de la fondation autour de l’axe j
𝜅𝑎 Paramètre sans dimension pour le calcul de fonction de transfert
𝐿 Demi-longueur de la fondation
𝑚 Masse
𝑀 Magnitude
𝑁1(60) Valeur normalisée de résistance à la pénétration
𝑁𝑚 Résistance à la pénétration (mesure)
𝜐 Coefficient de Poisson
𝜔 Pulsation
𝜔𝑛 Pulsation naturelle
𝜓 Fonction du module de Poisson
𝑟 Rayon ou rayon équivalent
𝑅𝛾 Ratio de déformation
𝜌 Masse volumique
𝑆𝐷𝑆 Paramètre d’accélération spectrale
𝜎𝑣′ Contrainte effective du sol
𝑇 Période de la structure, ISS pas pris en compte
XIX
𝑉 Cisaillement à la base
𝑉𝑠 Vitesse des ondes de cisaillement
𝑉𝑠,𝑚𝑜𝑦 Valeur moyenne de la vitesse des ondes de cisaillement
𝑧 Profondeur
XXI
Dédicace
XXIII
Remerciements
La présente étude n’aurait pas été possible sans l’appui de personnes et organismes clés. Je souhaite leur adresser ici toute ma gratitude pour leur bienveillance pendant la réalisation de ce travail.
Mes premiers remerciements vont d’abord à mon directeur de recherche, C.D. Annan, professeur à l’Université Laval. Disponible pour écouter mes questions et être bon instructeur durant ces deux années de maitrise, son expertise en ingénierie sismique et en structure ont été particulièrement formatrices.
Je tiens également à remercier D. Lebœuf, codirecteur de recherche, professeur à l’Université Laval. Complétant efficacement les compétences structurelles de Charles-Darwin par les siennes en géotechnique sismique. J’ai particulièrement apprécié sa bonne humeur durant tout ce parcours.
C’est avec une attention particulière que j’aimerai remercier le Centre d’Étude Interuniversitaire des structures Sous Charges Extrême (CEISCE), regroupement majeur de chercheurs en structure, pour leur confiance et leur soutien financier.
Il me parait également légitime de marquer ma reconnaissance envers mon école d’origine en France, Arts et Métiers ParisTech, qui forme jusqu’ici au Québec, une communauté forte et soudée. L’enseignement diversifié en ingénierie que j’ai pu y acquérir m’ont toujours bénéficié, et me permet de commencer dans la vie active avec un solide bagage.
Je remercie par ailleurs tous les habitants temporaires et permanents du 888, ainsi que les visiteurs habituels, pour leur soutien et les moments joviaux de deux années québécoises. J’ajouterai une pensée sportive pour Diane et les heures sous l’eau ; ainsi qu’un sourire pour Guillaume.
Et pour finir, je souhaite tout particulièrement exprimer ma gratitude envers mes parents et ma famille, pour leur appui inconditionnel, et leur encouragement chaleureux dans les choix que j’ai été amené faire jusqu’ici.
1
1. Introduction
1.1 Mise en contexte
La grande majorité des dimensionnements et des analyses de structures sont faites avec l’hypothèse que ces structures sont fixes au niveau de la fondation, que ce soit en translation ou en rotation. Or ces structures, lorsqu’elles sont excitées par des ondes sismiques, génèrent des forces d’inertie qui vont à leur tour développer des forces de cisaillement et des moments dans le système de fondation. Le cas idéal, celui qui est utilisé dans la plupart des modèles de base de dimensionnement de structure, consiste à considérer le sol et la fondation parfaitement rigides, leur raideur est infinie. Cependant, ce cas idéal ne représente pas la réalité, le sol et la fondation ont une certaine raideur, et les forces de cisaillement et les moments engendrés par les ondes sismiques créent des déplacements et rotations au niveau de la fondation. Il y a interaction entre les trois entités du système : le sol, la structure et la fondation. Il s’agit de l’interaction sol-structure.
Le terme « Interaction sol-structure » apparait en premier dans le début des années 1960 avec la conception des premières centrales nucléaires. (Tyapin, 2012). Pour des systèmes de structures très flexibles, les déplacements et rotations qui sont induits pour la fondation peuvent être considérées comme très petites comparées aux déplacements et rotations engendrées directement des ondes sur la structure. Elles peuvent alors être négligées. Mais pour des structures raides, les déformations de la fondation peuvent engendrer un apport significatif de flexibilité dans le système, et l’interaction sol-structure ne peut plus être négligée.
Il est nécessaire de prendre en compte ces déformations puisqu’elles influent directement sur la caractérisation des propriétés dynamiques du système, comme le mode fondamental de vibration et le facteur d’amortissement. En effet, les conséquences principales de la prise en compte de l’interaction sol-structure est l’allongement de la période et l’augmentation de l’amortissement, qui apparaissent par le biais ses deux composantes : l’interaction inertielle et l’interaction cinématique.
L’effet est ainsi mentionné dans la plupart des guides et normes de construction : « American Society of Civil Engineering » ASCE/SEI 7-10 (ASCE, 2010), « Federal Emergency Management Agency » FEMA 440 (FEMA, 2005), FEMA P-750 (FEMA, 2009),
2
ainsi que dans le Code Canadien sur le calcul de ponts routiers (CAN-CSA S6 F14) ou encore dans le Code National du Bâtiment du Canada (CNRC, 2005).
Pourtant dans les faits, l’interaction sol-structure est très peu utilisée ni appliquée, sauf pour les projets d’envergure. En effet dans la plupart des cas de séismes, un allongement de la période et une augmentation de l’amortissement sont synonymes de baisse de la demande en cisaillement à la base (base shear demand). L’interaction sol-structure serait alors dans ce cas-là conservatrice, et ne pas la prendre en compte permet d’acquérir une marge de sécurité supplémentaire.
Toutefois, des cas de séismes ont prouvé le contraire. En effet les effets « bénéfiques » de l’interaction sol-structure, liés à l’allongement de la période et l’augmentation de l’amortissement, sont générés à partir d’un spectre de réponse « type », préconisé dans les codes. Mais certains séismes, tels que Bucarest (1977), Mexico (1985), ou encore Kobe (1995), ont des spectres bien spécifiques, ne suivant pas le spectre type. Les effets de l’interaction sol-structure se sont pour ces cas-là alors avérés néfastes : la demande en cisaillement a été augmentée, et les dimensionnements des structures n’ont pas suffis. Il s’agit là de la pratique la plus courante : considérer une base fixe, et donc ne pas prendre en compte l’interaction sol-structure. C’est la méthode la plus simple, et comme dit plus haut elle permet, généralement, d’obtenir une marge de sécurité – qui n’existe pas toujours. La deuxième option est l’utilisation d’une analyse directe, dite méthode globale. Il s’agit d’une modélisation de tout le système {sol, structure et fondation}, sur un logiciel d’analyse avancée par éléments finis. Cette méthode complexe et difficile à mettre en œuvre n’est pas souvent utilisée. La troisième option est l’utilisation d’une analyse par méthode des sous-structures, où les deux composantes de l’interaction sol-structure sont séparées : l’interaction inertielle et l’interaction cinématique. Elle est plus simple d’utilisation, et se base sur des données géotechniques dans le but de calculer la fonction d’impédance de la fondation par le biais des calculs d’amortisseurs et ressorts utilisés pour représenter la flexibilité de la fondation face au sol.
3
1.2 Problématique
L'interaction sol-structure est un phénomène complexe dans l'analyse de la réponse d'une structure sous sollicitations sismiques. Le phénomène, même s'il n'est pas souvent pris en compte dans les dimensionnements de structures classiques, a fait l'objet de beaucoup d'études depuis les années 1960. En effet les enjeux peuvent être :
Économiques : les dimensionnements peuvent être réduits puisque la demande en cisaillement peut être diminuée en prenant en compte les effets de l'interaction sol-structure.
Sécuritaires : ces mêmes dimensionnements peuvent devoir être repris dans certains cas et certains environnements puisque les dimensionnements peuvent s'avérer insuffisants.
Plusieurs modèles théoriques ont donc été développés pour prédire les effets d’allongement de période et d’augmentation de l’amortissement de l'interaction sol-structure. Les premiers modèles analytiques, qui utilisent des structures à un degré de liberté, pour le calcul de l'amortissement et de période de fondations circulaires sont présentés par Bielak (1975), Veletsos et Nair (1975), Roesset (1980) Wolf (1985). Ces modèles comptent parmi les plus courants pour la prise en compte du phénomène. La forme de géométrie circulaire a historiquement dominé les modèles de solutions. Pourtant cette forme de géométrie circulaire pour les fondations ne représente pas la géométrie de la plupart des bâtiments (Givens 2013). C’est pourquoi il y a eu des extensions de ces modèles pour les appliquer à des formes de géométrie rectangulaire, et d’autres géométries plus communes dans la construction. Pais et Kausel (1988) aboutissent aussi à un modèle d’équations représentant la fonction d’impédance de fondations rectangulaires de surface et enterrées.
Même si de nombreux modèles, historiquement développés pour fondations circulaires, puis pour des fondations rectangulaires, existent, ils restent avant tout analytiques et théoriques.
Aussi, la majorité des connaissances sur les SSI est-elle basée sur ces modèles analytiques. Il y a donc un manque de données expérimentales, de terrain, permettant de valider les modèles. (Tileylioglu et al. 2011). Des études ont eu pour but de valider les modèles théoriques avec des évaluations expérimentales des effets de l’ISS. Des investigations en laboratoire ont été faites (Richart et Whitman 1967 : Dobry et al. 1986 ;
4
Nii, 1987 ; Gazetas et Stokoe 1991 ; Gadre et Dobry 1998 ; Gajan et Kutter, 2008). Ces investigations ont permis de mieux comprendre l’ISS, mais il s’agit là d’expérimentations en laboratoire, qui ne peuvent pas simuler complètement les conditions de terrain, et donc représenter complètement le phénomène.
Ainsi, des études sur site ont été effectuées. Lin et Jennings (1984) et Crouse et al. (1990) ont étudié les fonctions d’impédance pour des structures tests avec des fondations de petite taille (< 3m). Luco et al. (1988) Wong et al. (1988) et de Barros et Luco (1995) ont étudié le phénomène pour de plus fondations circulaires et rectangulaires de plus grandes dimensions (jusqu’à 25m). Ces études ont généralement donné une adéquation correcte avec les prédictions analytiques (Kramer et Stewart, 2004). Toutefois, beaucoup de ces études de terrain ont des limites, dues au manque de technologie (capteurs de qualité moyenne, système d’acquisition de données) et les incertitudes dues au site.
L'étude du site instrumenté de Garner Valley s'inscrit dans le prolongement de ces études de terrain sur site instrumenté pour la caractérisation de l'interaction sol-structure.
Le site de Garner Valley est un site instrumenté, situé dans le sud de la Californie à 35 km de la faille de San Andreas et 7 km de la faille de San Jacinto. Il est financé par la Commission de réglementation nucléaire des États-Unis (United States Nuclear Regulatory Commission - USNRC) et géré par l’Université de Californie à Santa Barbara (UCSB). Le site est un site complet : il comprend l’instrumentation géotechnique de son environnement, ainsi que l’instrumentation de la structure test qui y est implantée. Le tout est complété par l’acquisition des données sismiques des évènements de la région. Le site permet donc, grâce à son instrumentation, une étude complète du phénomène de l’interaction sol-structure.
Les modèles et analyses de l'interaction sol-structure étant historiquement théoriques et manquent de validation sur des données de terrain, l'étude du site instrumenté de Garner Valley permet-elle d'améliorer la compréhension du phénomène?
1.3 Objectifs
Il a donc été vu que l’interaction sol-structure est un phénomène complexe. Des méthodes existent pour l’étudier, mais elles ne sont pas utilisées dans la pratique car trop complexes,
5
et pas forcément adaptées à la réalité des analyses de dimensionnement et design des structures.
Le but de cette étude est d’implanter une méthode simple d’analyse de l’interaction sol-structure par la méthode indirecte, dite des sous-sol-structures, en utilisant les données de terrain pour détermination des paramètres de l’analyse, et vérification du modèle.
Les objectifs sont donc les suivants :
- Étude géologique du site de Garner Valley - Proposer un modèle géotechnique du site
- Valider les paramètres nécessaires à la constitution du modèle simplifié d’interaction sol-structure
- Utilisation des données sismiques, structurelles et géotechniques in situ pour la constitution d’un modèle intégré du site ; en utilisant un logiciel commercial répandu.
1.4 Méthodologie
L’étude de la réponse dynamique du site de Garner Valley, qui correspond à l’étude de la réponse d’un modèle de sol pour en valider les paramètres permet de conclure sur l’utilisation des paramètres nécessaires à l’étude dynamique de la réponse structurelle et donc de l’interaction sol-structure. La figure 1-1 schématise la méthodologie de l’étude. Le traitement des données de terrain et des données sismiques ont pour but la constitution d’un modèle stratigraphique du sol sur le site. Une étude paramétrique permet de conclure sur le modèle dont la réponse sismique est la plus satisfaisante vis-à-vis des données de terrain qui existent et des enregistrements sismiques. Il est alors possible d’utiliser les paramètres géotechniques de ce modèle validé pour procéder à l’étude de l’interaction sol-structure en tant que telle. Cette deuxième partie de l’analyse veut permettre de modéliser l’interaction sol-structure par la méthode des sous-structures : et notamment par l’implantation de ressorts et amortisseurs dans l’interface sol-structure pour modéliser la fonction d’impédance de la fondation. Les rôles des données d’entrées y sont étudiés : différences entre « foundation input motion » (FIM) et « free-field motion » (FFM). Les données de terrain et les enregistrements sismiques pourront là aussi permettre une comparaison des modèles avec ce qui se passe réellement sur le site.
6
1.5 Organisation du mémoire
Le premier chapitre de ce mémoire est constitué de cette présente introduction. Elle inclue le contexte, qui a été développés, ainsi que la problématique et les objectifs de recherche. Le deuxième chapitre de ce mémoire permet de s’attarder sur l’explication détaillée du phénomène d’interaction sol-structure. Cette revue de littérature explicite le phénomène, les différences entre interaction inertielle et interaction cinématique et présente une étude rapide du phénomène sur une structure à un degré de liberté pour en expliciter les conséquences majeures de l’interaction : allongement de la période et augmentation de l’amortissement.
Figure 1-1 : Méthodologie de l'étude
Les méthodes d’analyse de l’interaction sol-structure sont ensuite détaillées : méthode directe, méthode des sous-structures, et méthodes hybrides non-linéaires. Ce chapitre se conclut par les conséquences de l’interaction et les paramètres majeurs.
Le troisième chapitre de ce mémoire est constitué de la description du site instrumenté de Garner Valley. Y sont explicités l’historique et la localisation du site, ainsi que la description
7
des différentes campagnes d’essai et la localisation des capteurs. C’est toute la géologie du site qui est expliquée.
La réponse dynamique géotechnique constitue le quatrième chapitre du mémoire. La sélection des évènements et le traitement des données sont expliqués, ainsi que le logiciel utilisé et le modèle linéaire équivalent qui est la base de toute l’analyse géotechnique ici. Le plan expérimental liste les paramètres qui ont été étudiés pour obtenir la meilleure adéquation entre la réponse du modèle et la réponse réelle des données du site de terrain. Les résultats sont ensuite décrits et discutés.
Enfin, le chapitre 5 décrit l’analyse de la réponse dynamique de la structure du site de Garner Valley. La constitution du modèle est expliquée et notamment le calcul des ressorts et amortisseurs, basé sur les données de la partie 4. Le plan expérimental y est expliqué : différence entre Foundation Input Motion (FIM) et Free Field motion (FFM), ainsi que fondation fixe ou flexible. Les résultats de l’analyse y sont expliqués et discutés, pour savoir si ou non la méthode simplifiée des sous-structures est applicable à un logiciel commercial et répandu d’analyse structure.
La conclusion constitue le dernier chapitre de ce mémoire, qui résume les travaux développés ici et propose des suggestions de travaux futurs.
9
2. Revue de Littérature
La réponse d’une structure subissant un séisme est affectée à trois ensembles : la structure, la fondation et le sol situé autour et sous la fondation. Ces trois ensembles sont liés et interagissent entre eux. L’analyse de l’Interaction Sol Structure (ISS) consiste en l’évaluation collective des trois ensembles en un seul système. Cette analyse nécessite l’étude du comportement du sol, et l’étude dynamique de la structure (Davidovici, 1999)
2.1 Interaction sol structure
L’interaction Sol-Structure peut schématiquement être expliquée comme suit (Galy, 2013): - Une faille sismique génère une onde qui se propage dans le sol, et notamment dans
le rock
- Cette onde est modifiée, durant sa remontée en surface, en amplitude et en fréquence, par le fait de traverser plusieurs strates de couches, par les problématiques de réflexion, de réfraction et de diffraction (propriétés mécaniques des sols traversés et géométrie)
- En surface, la vibration du sol engendre une vibration de la structure [instant t] - La vibration de la structure – générée par la vibration du sol - génère à son tour des
vibrations dans le sol, et modifie –en fréquence, amplitude et durée - l’onde vibratoire qui arrive à l’instant t+1 au niveau du système de fondation.
- La vibration du sol, ainsi modifiée par la structure en vibration, continue de solliciter la structure et modifie ses vibrations et donc la vibration du sol. Ainsi de suite. - La figure 2-1, extraite de Pecker (2008) permet d’illustrer le phénomène.
L’interaction sol structure correspond ainsi à la différence entre la réponse d’une structure réelle (reposant donc sur un sol flexible) et celle de la structure avec une fondation rigide idéalisée sur un sol lui-même rigide. En effet, puisque le milieu sur lequel repose la structure n’est pas complètement rigide, plusieurs effets combinés provoquent une altération du comportement de l’ensemble : la présence même d’une fondation avec une certaine géométrie, modifiant ainsi les propriétés du milieu de propagation des ondes, le couplage mécanique qui existe entre le sol et la structure et les effets dus à la dissipation énergétique par amortissement hystérétique et radiatif.
10
Figure 2-1 : Principe de l'interaction-sol-structure (Pecker, 2008)
2.2 Interaction inertielle et interaction cinématique
L’analyse du phénomène d’interaction sol structure évalue donc la réponse globale de la structure, de la fondation et du sol sous-jacent et autour de la fondation, face aux ondes sismiques en champ libre (free-field motion FFM). Le terme champ libre fait référence aux mouvements qui ne sont pas affectés par les vibrations de la structure, ou l’atténuation des ondes autour de la fondation, et donc situés « loin » de la structure en question.
Les effets de l’ISS sont catégorisés en deux : les effets de l’interaction inertielle et les effets de l’interaction cinématique. Ces deux interactions sont distinctes, mais agissent conjointement dans leurs effets. Ces deux notions apparaissent en premier avec Robert V. Whitman (Kausel, 2010) dans ses travaux sur l’ISS en 1975.
2.2.1 Interaction Inertielle
L’interaction inertielle est directement liée à la raideur de la fondation et à son amortissement. En effet, l’inertie développée par la structure excitée engendre à la base des contraintes de cisaillement, de moment et de torsion. Stewart et al. (1999) expliquent que ces contraintes génèrent à leur tour des déplacements et des rotations au niveau de
11
l’interface entre le sol et la fondation. Ces déplacements et rotations sont possibles par la flexibilité dans le système fondation et sol. Ceci engendre une plus grande flexibilité de la structure, et – la plupart du temps – une augmentation de la période de la structure. Par ailleurs, il y a également dissipation d’énergie par amortissement radiatif et amortissement hystérétique du sol. L’amortissement global de la structure en est augmenté.
2.2.2 Interaction cinématique
Concernant l’interaction cinématique, la présence d’une fondation rigide sur ou dans le sol peut avoir pour effet la modification du mouvement de la fondation (foundation input motion FIM) par rapport au mouvement en champs libre (free-field motion FFM), de par les effets des ondes incohérentes, de l’orientation des ondes, ou de l’enterrement de la fondation. (Stewart et al. 1999).
2.3 Étude simple et effets principaux de l’interaction sol
structure
Il s’agit là de construire un modèle équivalent à un degré de liberté pour comprendre le phénomène et les effets qui s’en suivent. La figure 2-2 est alors construite :
Figure 2-2 : Illustration schématique des effets de la prise en compte de l'interaction sol-structure (adapté NEHRP, 2012)
Dans ce modèle simplifié de structure à un degré de liberté, de raideur k, une masse m repose sur une base fixe, dans le cas de gauche. Il est alors aisé de montrer que Δ = 𝐹 𝑘⁄ .
12
Dès lors, il vient les caractéristiques du système : la pulsation propre 𝜔 = √𝑘 𝑚⁄ , et donc la période de vibration du modèle à base fixe : 𝑇 = 2𝜋 𝜔 = 2𝜋√𝑚 √𝑘⁄ ⁄ . Ainsi :
𝑇2= (2𝜋)2 𝑚
𝐹 Δ⁄ = (2𝜋)2 𝑚Δ
𝐹 (2.1)
En considérant le même système, mais cette fois-ci en intégrant les effets de la flexibilité du sol, par rapport à la rigidité de la fondation. Cette flexibilité est représentée par trois ressorts : verticalement (kz), horizontalement (kx) et en rotation (ky = kθ). La prise en compte de ces éléments permet d’écrire l’équation de déflexion de la masse m : Δ̃ = 𝐹 𝑘⁄ + 𝑢𝑓+ ℎ𝜃. C’est à dire :
Δ̃ = 𝐹 𝑘⁄ + 𝐹 𝑘⁄ 𝑥+ ℎ × 𝐹ℎ 𝑘 𝜃
⁄ (2.2)
La période du système en prenant en compte sa flexibilité devient donc :
𝑇̃2= (2𝜋)2𝑚 (1 𝑘+ 1 𝑘𝑥+ 1 𝑘𝜃) (2.3)
En combinant les deux expressions du de la période, en base fixe et en base flexible, il est aisé d’arriver à la formulation suivante (Veletsos et Meek, 1974) :
𝑇̃ 𝑇= √1 + 𝑘 𝑘𝑥+ 𝑘ℎ² 𝑘𝜃 (2.4)
Concernant l’amortissement, il vient la relation suivante :
𝛽0= 𝛽𝑓+ 𝛽𝑖
(𝑇̃ 𝑇⁄ )𝑛 (2.5)
Où 𝛽0 est l’amortissement du système complet avec interaction sol-structure ; 𝛽𝑓 est l’amortissement de la fondation (foundation damping) ; et 𝛽𝑖 est l’amortissement de la structure sur base fixe (généralement pris comme étant égal à 5% pour les structures conventionnelles). Il faut noter que l’amortissement de la fondation 𝛽𝑓 représente les
13
contributions de l’interaction sol-structure : contributions du comportement hystérésis du sol (amortissement hystérétique𝛽𝑠) et absorption d’énergie sous la forme d’ondes depuis la fondation (amortissement radiatif 𝛽𝑟). L’exposant n au dénominateur est égal à 3 pour un amortissement visqueux linéaire et à 2 dans les cas contraires. (Givens, 2013)
Ces deux équations permettent de comprendre les deux effets principaux de l’interaction sol structure : l’allongement de la période et l’augmentation de l’amortissement du système.
2.4 Méthode de résolution
Les méthodes qui existent pour évaluer les effets de l’interaction cinématique et de l’interaction inertielle sont les suivantes : la méthode directe et la méthode des sous-structures. Dans la méthode directe, le sol et la structure sont décrits dans un même modèle et le problème est analysé d’un seul tenant. Dans la méthode des sous-structures, la question de l’ISS est résolue en utilisant les résultats d’analyses pour plusieurs sous-systèmes, qui une fois combinée entre eux fournissent la solution finale du système global. (Johnson, 2003 ; Pecker, 2008 ; Stewart et al. 1999).
Il faut préciser que la méthode des sous-structures n’est applicable que pour des analyses dans le domaine linéaire. Aussi, les analyses non linéaires ne sont faisables que par la méthode globale. Toutefois, dans le cadre d’études simples, la méthode des sous-structures peut être utilisée pour des systèmes faiblement non linéaire (Mylonakis et al., 1997).
Pour simplifier le problème d’ISS, et donc réduire le temps de calcul, certains modèles sont en 2D. Bien que cette simplification soit pratique, elle est potentiellement inadéquate pour plusieurs raisons (Wolf et Song, 2002) : l’amortissement radiatif peut être surestimé, la surface de contact dans les modèles 3D peut être supérieure à celle des modèles 3D ce qui peut engendrer une surestimation de l’amortissement radiatif global, et enfin la modélisation 2D peut sous-estimer la rigidité.
L’analyse peut être faite dans le domaine fréquentiel ou dans le domaine temporel. Le domaine fréquentiel permet de mieux rendre compte de l’amortissement radiatif et des conditions de frontières, mais ne permet de travailler que dans le domaine linéaire. Le domaine temporel permet de travailler dans la phase plastique, mais les imprécisions quant
14
à l’amortissement modal mènent à des conceptions parfois trop conservatrices (Ostadan et al., 2004).
2.4.1 Méthode directe / globale
L’avantage de la méthode globale est le fait de faire l’intégralité de l’analyse en une seule étape. Cette méthodologie permet de rendre compte des non-linéarités, contrairement à la méthode des sous-structures (qui utilise le principe de superposition pour les systèmes linéaires). Il faut toutefois faire attention à ne pas appliquer les forces sismiques aux masses des fondations. (Wilson, 2002).
Figure 2-3 : Illustration de la méthode globale (NEHRP, 2012)
Les travaux de Jérémic et al. (2009a) permettent de distinguer plusieurs sous-catégories :
a) Méthode de la rigidité de la fondation : utilisation de ressorts et amortisseurs non linéaires représentent le comportement du sol dans un logiciel par calcul éléments finis. Le calcul des propriétés des ressorts se fait en se reportant aux équations de Gazetas (1991), ou Pais et Kausel (1988), ou pas un modèle Éléments Finis pour le sol. ETABS (CSI, 2015) et SAP2000 (CSI, 2015).
Notons que pour cette première catégorie, les travaux de Jeremic et al. (2009a) classent cette méthode dans la méthode directe, mais c’est une question de choix de point de vue. Le NIST Report (NEHRP, 2012) classe cette méthode comme une
15
méthode indirecte, puisque la structure est séparée du sol par la représentation des ressorts, qui n’existent pas réellement. Le problème général de l’interaction sol-structure est donc scindé en deux, entre le sol et la sol-structure. Nous choisissons donc de la classer dans la catégorie des méthodes des sous-structures, telles que décrites dans la suite.
b) Méthode PY pour les fondations profondes
c) Modèle 3D : méthode globale permettant d’obtenir les forces structurelles et pour le sol. La modélisation est conséquente et les temps de calcul sont très importants. Mais cette technique permet de résoudre tous les problèmes et d’étudier des structures à géométries complexes. Il faut avoir une attention particulière sur la taille de la représentation du sol par rapport à la structure, et placer des conditions de frontière aux bords du modèle pour éviter les problèmes de réflexion des ondes sismiques. Les logiciels peuvent être par exemple PLAXIS 3D (Plaxis, 2012) et ABAQUS (Dassault Systèmes, 2016), ou encore OpenSees (OpenSees, 2011). La figure 2-3 illustre un exemple de modélisation globale.
2.4.2 Méthode des sous-structures
La méthode des sous-structures se distingue de la méthode directe car elle scinde le système ISS en différents systèmes. Elle est donc limitée au domaine linéaire, puisqu’elle utilise le théorème de superposition. Les solutions sont calculées pour le sol et pour la structure, puis les conditions de compatibilités à l'interface sont appliquées.
L’approche par sous-structures a donné naissance à des méthodes de calcul d’ISS simplifiées et appliquées dans les recommandations, ATC-40 (ATC, 1996), FEMA 273 (FEMA, 1997), FEMA P-750/2009 (FEMA, 2009) et d’autres codes ASCE/SEI 7-10 (ASCE, 2010).
Les étapes sont les suivantes, et sont illustrées dans la figure suivante :
a) Détermination du mouvement d’une fondation rigide sans masse soumise à la sollicitation sismique. Il s’agit en fait de ‘interaction cinématique, puisqu’on y détermine la Fondation Input Motion. (à différencier du mouvement en champ libre dit Free-Field Motion FFM)
16
b) Détermination de la matrice d’impédance de la fondation. Cette étape traduit les effets de ‘interaction inertielle.
c) Calcul de la réponse dynamique de la structure.
La figure 2-4 illustre les étapes de modélisation par méthode des sous-structures et l’utilisation des ressorts et amortisseurs que nous serons amenés à calculer.
Figure 2-4 : Illustration schématique de la méthode des sous-structures (NEHRP, 2012)
Il faut noter que la première étape peut parfois être négligée quand on travaille avec une fondation superficielle et que la structure est soumise à une onde qui se propage uniquement de façon verticale. (ie. l’interaction cinématique est nulle). Concernant la deuxième étape, le calcul peut être évité et il est possible de se référer à des fonctions d’impédances publiées dans la littérature, ou d’utiliser l’approximation à une fondation circulaire. (Stewart et al. 1999).
17
2.4.3 Méthodes non-linéaires
Il a donc été vu que deux méthodologies générales existaient : la méthode globale, précise, mais longue et couteuse en calculs, et la méthodologie des sous-structures. Celle-ci n’est utilisable que pour un comportement linéaire car il s’agit d’une application du théorème de superposition. Il existe alors des méthodes d’analyse, indirectes, mais non linéaires : l’analyse par Beam-On-Nonlinear-Winkler-Foundation (BNWF) et le Contact Interface Model.
2.5.3.1 Beam-On-Nonlinear-Winkler-Foundation
Le modèle BNWF est implanté dans OpenSees (OpenSees, 2011).
Figure 2-5 : Élément BNWF (NEHRP, 2012)
Son fonctionnement consiste en l’utilisation d’éléments « beam-column », qui permettent de rendre compte du comportement de la semelle de la fondation superficielle avec des éléments de sols, sans longueur, indépendants, représentant le comportement sol-semelle. Le modèle est développé pour des analyses en dimension 2 seulement. Ainsi, les éléments beam-column, de dimension 1, utilisé pour la semelle ont trois degrés de liberté par nœuds : horizontal, vertical et rotation. Des ressorts unidimensionnels sont utilisés pour simuler le comportement contrainte verticale-déplacement (q-z), le comportement contrainte horizontale passive – déplacement (p-x), et le comportement contraint de cisaillement – glissement, à la base de la semelle (t-x). Le moment est pris en compte par la distribution de ces ressorts le long de la base de la semelle. (Gajan et al. 2008)
18
Figure 2-6 : Ressort type du modèle (Gajan et al., 2008)
Les modèles mathématiques des ressorts non linéaires q-z, p-x et t-x sont adaptés de modèles pour les fondations en piles, par Boulanger et al. (1999). Les matériaux décrivant les ressorts captent le comportement élastique du champ libre et le comportement des déplacements permanents du champ proche (Comportement plastique). Cf. figure 2-6.
Les comportements des ressorts p-x, t-x et q-z fonctionnent de la même manière. La courbe contrainte-déformation qui leur correspond, pour décrire le comportement du sol, est donc séparée en deux parties : une partie linéaire et une non-linéaire. La partie linéaire se comporte en suivant la loi suivante, où kz est la raideur initiale :
𝑞 = 𝑘𝑧𝑠 (2.6)
Dans cette équation, q représente la force du ressort, et s sa déformation. La limite supérieure de la zone linéaire est définie par q0. Il s’agit d’une fraction de la charge ultime
qult :
𝑞0= 𝐶𝑟𝑞𝑢𝑙𝑡 (2.7)
Où Cr est un paramètre directement défini dans OpenSees (OpenSees, 2011), lié au modèle de matériau et que l’utilisateur ne renseigne pas. La partie non linéaire de la courbe de contrainte-déformation est décrite de la manière suivante :
19 𝑞 = 𝑞𝑢𝑙𝑡− (𝑞𝑢𝑙𝑡− 𝑞0) [ 𝑐. 𝑠50 𝑐. 𝑠50+ |𝑠 − 𝑠0|] 𝑛 𝑝𝑜𝑢𝑟 |𝑠| > 𝑠0 (2.8)
Le paramètre s50 est le déplacement du ressort quand 50% de la charge ultime est consommée, s0 est le déplacement à la charge q0 et les paramètres c et n sont des paramètres qui contrôlent la forme de la courbe de comportement contrainte-déformation en domaine plastique.
Les paramètres d’entrée, renseignés par l’utilisateur sont des renseignements caractéristiques des propriétés physiques et géométriques, provenant de tests géotechniques, comme il l’a été vu dans les premières parties de ce rapport. Ces renseignements permettent notamment l’obtention des paramètres qult (capacité de
chargement) et raideur élastique kz.
- Le type de sol (sable ou argile, renseignement de l’angle de frottement et de la cohésion)
- Capacité de chargement (verticalement et latéralement), par le renseignement des dimensions de la semelle, son enfouissement, poids volumique, cohésion et angle de frottement.
- Raideur latérale et verticale. Elles peuvent être entrées manuellement ou calculées. Dans ce cas-là il faut renseigner le module de cisaillement G et le coefficient de Poisson 𝜐.
La nécessité de renseigner, dans le code, les données suivantes peut par ailleurs représenter un frein à l’utilisation de ce modèle.
- Amortissement radiatif cz. Le coefficient de l’amortisseur est considéré comme un paramètre physique, Ce paramètre varie avec la raideur du sol, la forme de la semelle, son ratio et l’enfouissement.
- Capacité en tension TP : ce coefficient représente la force maximale de succion que peut contenir le sol dans la direction verticale. (Cette capacité varie entre 0-0.10)
- Distribution et amplitude de la raideur dans la direction verticale : deux paramètres sont nécessaires pour tenir compte de la distribution de la raideur verticale le long de la semelle : Le « stiffness intensity ratio » Rk=k(extrémité)/k(milieu), et le « end
20
length ratio » Re=L(extrémité)/2L. L(extrémité) est défini comme la longueur à laquelle la raideur est augmentée.
Il faut ajouter les deux séries de paramètres suivants qui sont importants dans le déroulement de la modélisation :
- L’espacement des ressorts verticaux S. Ce paramètre est entré dans le modèle comme étant une fraction de la demi-longueur L de la semelle : S=le/L où le est l’espacement non normalisé des ressorts. Un nombre minimum de 25 ressorts sur la longueur de la semelle est conseillé.
- Les paramètres de forme (Cr, c et n) sont des paramètres qui sont intégrés dans le code des matériaux, dans OpenSees (OpenSees, 2011). Les valeurs recommandées dépendent du type de sol.
La figure 2-7 suivante montre un exemple de modélisation d’un bâtiment de 4 étages. Sont utilisés 60 éléments beam-column, connectés à des ressorts (sol) sans longueur. Il n’y a pas de ressorts p-x car les semelles ne sont pas enfouies. Les 61 ressorts verticaux sont espacés par 2% delà longueur totale. La zone d’extrémité est estimée à 15% de la longueur de la semelle. La raideur y est multipliée par un facteur Rk=3.
21
2.5.3.2 Contact Interface Model
Ce modèle décrit le comportement d’un unique élément placé à l’interface entre une fondation rigide et le sol en champ libre pour représenter la flexibilité et la dissipation d’énergie qui est associée à l’interaction sol-structure.
Numériquement parlant, le macroélément est directement placé à l’interface entre la semelle et le sol, remplaçant la fondation rigide et le sol aux alentours. Quand les déplacements incrémentaux sont donnés en entrée au macroélément, il retourne en sortie les charges incrémentales correspondantes et vice versa. Le fonctionnement est résumé dans la figure 2-8 suivante.
Figure 2-8 : Illustration du fonctionnement d'un macroélément pour le Contact Interface Model (CIM) (NEHRP, 2012)
Afin d’obtenir les relations qui régissent le modèle, qui sont obtenues en recherchant la géométrie des interstices et contacts de l’interface sol-fondation, la modélisation CIM fournit des relations non linéaires entre les chargements cycliques et les déplacements du système sol-fondation pendant un chargement cyclique combiné (vertical, cisaillement et moment).
Le contact entre la fondation et le sol est recherché par la modélisation CIM en utilisant un paramètre appelé « critical contact area ratio » A/Ac où A est la surface de la semelle et Ac la surface de la semelle devant être en contact avec le sol pour pouvoir supporter les charges verticales et de cisaillement. Ce ratio peut être considéré comme une version alternative du facteur de sécurité par apport à la capacité de portance. Pour un mur de cisaillement en dimension 2, chargé dans le plan du mur, ce ratio vaut 2L/Lc, tel qu’illustré dans la figure 2-9 suivante. (Gajan, 2008)
22
Figure 2-9 : CIM a) longueur critique de contact et moment ultime b) modèle d’interface de contact pour un chargement cyclique en moment (NEHRP, 2012)
Quand la rotation augmente, la longueur de contact de la semelle atteint sa valeur minimale Lc et, en supposant que la distribution de pression est uniforme dans cette zone, la réaction du sol a lieu à la valeur maximale d’excentricité : emax=(L-Lc)/2.
Dans la figure suivante, la position de la fondation est suivie par rapport à la surface du sol d’en dessous, qui est poussée au maximum jusqu’à soil_max quand il y a chargement, et déchargée jusqu’à soil_min. Il n’y a aucune contrainte de transfert entre le sol et la fondation dans la zone sans contact.
La méthode CIM nécessite sept paramètres d’entrée pour rendre compte des principales caractéristiques du comportement de fondations superficielles sous chargement cyclique (capacité de chargement, dégradation de la raideur, dissipation d’énergie, déformations permanentes) :
- Charge verticale ultime Qult - Longueur 2L de la semelle - Raideur verticale initiale Kv - Raideur horizontale initiale Kh
a)
23
- Limite élastique de rotation θelastic : définis comme la valeur maximale de l’amplitude de rotation sans aucun tassement de la fondation. Ordre de grandeur : 0,001 radians (Gajan et al., 2008)
- Rebound ratio Rv : facteur empirique qui rend compte du rebondissement élastique et gonflement du sol dans l’interstice sous une semelle de fondation soulevée. C’est le quotient du déplacement de soulèvement de sol par le tassement total du sol. Il affecte la longueur de la zone de transition entre l’interstice et la zone de contact. La valeur par défaut est 0,1. Quand elle augmente, le tassement de la fondation diminue et améliore la convergence des calculs dans la plupart des cas.
- Footing node space DL : ce paramètre spécifie la distance entre chaque nœud de la semelle, créé par le modèle. Ce paramètre est défini par l’utilisateur et entre en jeu dans la stabilité et la précision du modèle, ainsi que dans le temps de calcul nécessaire. La valeur type est de 1,0% de la demi-longueur L de la semelle pour des facteurs de sécurité de 2, jusqu’à 0,1% pour les structures avec un facteur de sécurité plus élevé FS=40 par exemple).
Figure 2-10 : Modèle OpenSees CIM pour un bâtiment de 4 étages (NEHRP, 2012)
La figure 2-10 est la représentation du modèle CIM, toujours sur le programme OpenSees, et toujours pour le même bâtiment (A) de 4 étages. La structure est développée de la même manière que pour le modèle BNWF (modèle en dimension-2 à 3 degrés de liberté, masse ponctuelle rattachée à chaque nœud, connecté par éléments beam-column). Le modèle de contact à l’interface est connecté au niveau de l’interface sol-semelle. Les nœuds 1 et 2
24
représentant l’interface semelle-sol sont connectés par une section sans épaisseur. Le nœud 1 est fixe.
Le modèle BNWF est apprécié pour sa simplicité et ses capacités de prédiction sur de nombreux problèmes variés. Pourtant il comporte des limites. En effet les capacités verticales et latérales de la fondation ne sont pas couplées. Donc quand la capacité verticale, ou en moment est modifiée, il n’y a pas d’influence sur la capacité en cisaillement. C’est pour cela que le modèle CIM à un avantage par rapport au modèle BNWF là-dessus. En effet la méthode CIM permet le couplage entre les capacités verticales, en cisaillement et en moment.
Par ailleurs, puisque les ressorts dans le modèle BNWF sont de dimension 1, ils ne répondent qu’aux sollicitations qui leur sont parallèles, ignorant les chargements dans l’autre direction. De même, les ressorts verticaux sont indépendants les uns des autres : la réponse de l’un ne va pas influencer la réponse de l’autre.
2.5 Conséquences de l’Interaction sol-structure
Il a donc été vu dans la partie 2.3 que les deux principaux effets de l’Interaction Sol Structure sont l’allongement de la période et l’augmentation de l’amortissement.
2.5.1 Paramètre influant sur l’allongement de la période et le facteur
d’amortissement
Tout d’abord, et de manière générale, il est établi que l’interaction sol-structure n’a que peu d’effets sur la réponse de structures flexibles et/ou légères fondées sur des sols raides. Au contraire, les effets peuvent être plus importants pour les structures raides et/ou raides supportées par des sols relativement mous.
Plus précisément, le premier paramètre est le « structure-to-soil ratio », qui s’exprime de la manière suivante :
1 𝜎=
ℎ
𝑉𝑠𝑇 (2.9)
Le terme VSreprésente la vitesse des ondes de cisaillement dans le sol, h est la hauteur de
25
à 2, et l’allongement de période 𝑇̃ 𝑇⁄ et l’amortissement y sont sensibles, comme le montre la figure 2-11. Plus le facteur 1 𝜎⁄ est élevé, plus l’allongement de la période et l’amortissement de la fondation sont élevés.
Les travaux empiriques de Stewart et al. (1999b) illustrent ces faits en montrant que pour une structure raide (T = 0,1s) de forme cylindrique (h = 14,3m et r = 4,9m) reposant sur un sol mou (Vs = 85m/s), c’est-à-dire pour un 1 𝜎⁄ de 1,5 (très élevé), l’allongement de période est de 𝑇̃ 𝑇 = 4⁄ et le facteur d’amortissement 𝛽0= 30%. Ceci est à comparer avec une structure flexible (T = 0,8-1,0s), dont la base de la structure (h=6,7m, ru=21,6m) est isolée fondée sur du rock (Vs = 300m/s), donnant un 1 𝜎⁄ de 0,02-0,03, pour un allongement de période 𝑇̃ 𝑇 = 1⁄ et un amortissement de 𝛽0= 0%. L’influence du « structure to soil stiffness ratio » est donc claire ici, pour deux situations différentes. Il s’agit là du paramètre le plus influant par rapport aux effets de l’interaction sol structure.
Un deuxième paramètre est le ratio de masse « structure to mass ratio », exprimé de la manière suivante pour les fondations circulaires :
𝛾𝑐 = 𝑚
𝜌𝜋𝑟𝑢2ℎ (2.10)
Et de la manière suivante pour les fondations de géométrie rectangulaire :
𝛾
𝑟=
𝑚
𝜌
𝑠4𝐵𝐿ℎ (2.11)Pour des structures conventionnelles, il a été déterminé que 𝛾 ≈ 0,1 − 0,2. Il est recommandé la valeur de 0,15 dans les travaux de Veletsos et Meek (1974). De même, l’allongement de période 𝑇̃ 𝑇⁄ y est sensible, ainsi que l’amortissement 𝛽0, bien que son effet soit modeste (par ailleurs, il a été vu dans l’équation de 𝑇̃ 𝑇⁄ que la masse n’intervenait pas). Le troisième paramètre est le « embedment ratio » e/r qui compare les fondations de surface (e/r=0) aux fondations totalement enfouies (e/r=1). Les résultats empiriques ne fournissent pas assez de corrélations entre eux pour valider l’influence de ce paramètre.