UNIVERSITÉ DE
SHERBROOKE
Faculté de génie
Génie électrique et génie informatique
CAPTURE ORBITALE MARTIENNE
À L’AIDE DE LA TRAÎNÉE AÉRODYNAMIQUE
Mémoire de maîtrise es sciences appliquées
Spécialité : génie électrique
J/an-François HAMEL
Published Héritage Branch
395 Wellington Street Ottawa ON K1A 0N4 Canada
Your file Votre référence ISBN: 978-0-494-18961-0 Our file Notre référence ISBN: 978-0-494-18961-0 Direction du Patrimoine de l'édition 395, rue Wellington Ottawa ON K1A 0N4 Canada NOTICE:
The author has granted a non- exclusive license allowing Library and Archives Canada to reproduce, publish, archive, preserve, conserve, communicate to the public by
télécommunication or on the Internet, loan, distribute and sell theses
worldwide, for commercial or non- commercial purposes, in microform, paper, electronic and/or any other formats.
AVIS:
L'auteur a accordé une licence non exclusive permettant à la Bibliothèque et Archives Canada de reproduire, publier, archiver,
sauvegarder, conserver, transmettre au public par télécommunication ou par l'Internet, prêter, distribuer et vendre des thèses partout dans le monde, à des fins commerciales ou autres, sur support microforme, papier, électronique et/ou autres formats.
The author retains copyright ownership and moral rights in this thesis. Neither the thesis nor substantial extracts from it may be printed or otherwise reproduced without the author's permission.
L'auteur conserve la propriété du droit d'auteur et des droits moraux qui protège cette thèse. Ni la thèse ni des extraits substantiels de celle-ci ne doivent être imprimés ou autrement reproduits sans son autorisation.
In compliance with the Canadian Privacy Act some supporting forms may have been removed from this thesis.
While these forms may be included in the document page count,
their removal does not represent any loss of content from the thesis.
Conformément à la loi canadienne sur la protection de la vie privée, quelques formulaires secondaires ont été enlevés de cette thèse. Bien que ces formulaires aient inclus dans la pagination, il n'y aura aucun contenu manquant.
RESUME
Une des stratégies envisagées perm ettant de dim inuer la masse des véhicules d'explo ration planétaire est u n processus appelé « aérocapture ». Afin d'effectuer une mise en orbite, cette technique utilise la tramée générée par le passage à grande vitesse d u véhi cule à travers l'atm osphère pour lui faire perdre suffisamment d'énergie p our l'am ener dans les conditions orbitales souhaitées en sortie de l'atm osphère, plutôt que d'utiliser des propulseurs traditionnels. Cependant, dans le cadre de l'exploration m artienne, notre m auvaise connaissance de l'atm osphère de Mars et sa grande variabilité rendent l'utilisa tion de cette technique particulièrement risquée.
U n des algorithmes de guidage et de contrôle capables d'effectuer ce genre de m ission est le prédicteur-correcteur analytique. Toutefois cet algorithme nécessite une robustesse ac crue aux incertitudes des conditions d'entrée et de l'environnem ent martien. Ainsi, deux modifications au prédicteur-correcteur analytique sont proposées afin de rendre cet algo rithm e plus robuste.
La première modification consiste à adapter en tem ps réel la vitesse de transition entre la phase d'entrée et de sortie en fonction de la dérivée d u gain d'énergie. L'algorithme p eu t alors adapter la vitesse de transition en fonction de la dispersion p ar rapport à une trajectoire de référence. Il est dém ontré que cette modification augm ente de façon très si gnificative la robustesse aux incertitudes sur les conditions initiales. La deuxième m odi fication proposée perm et l'adaptation d u modèle embarqué de l'atm osphère à partir des données recueillies pendant la descente. L'algorithme évalue un modèle de l'atm osphère compatible avec les hypothèses posées dans le guidage du prédicteur-correcteur analy tique. Les résultats de sim ulation m ontrent que cette modification perm et d'augm enter la précision de l'algorithme. Il est finalement dém ontré que d'im planter en m êm e tem ps ces deux modifications entraîne une synergie qui perm et d'augm enter la robustesse de l'algorithm e tout en améliorant sa précision.
REMERCIEMENTS
Tout d'abord, je tiens à remercier m on directeur de recherche, Jean de Lafontaine, pour son soutien technique et pour avoir guidé mes recherches de façon si éclairée.
Je remercie aussi le CRSNG et l'Agence spatiale canadienne pour avoir financièrement appuyé ce projet de recherche.
Finalement, des remerciements tout particuliers vont à tous les m embres d u SIgMA sans qui ce projet de recherche ne m 'aurait pas été aussi enrichissant.
TABLE DES MATIÈRES
1 INTRODUCTION 1 2 ÉTAT DE L'ART 3 2.1 Le prédicteur-correcteur analytique ... 7 2.1.1 Phase de c a p t u r e ... 9 2.1.2 Phase de s o r t i e ... 10 2.1.3 Correction de l'inclinaison de l 'o r b i t e ... 12 2.2 Le contrôleur d 'é n e rg ie ... 12 2.3 Le prédicteur-correcteur n u m é r i q u e ... 16 2.3.1 Optimisation de la loi de c o m m a n d e ... 17 2.3.2 Intégration n u m é riq u e ... 19 2.4 Le contrôleur m i x t e ... 202.5 Le contrôleur de conditions term in a les... 22
2.5.1 Contrôleur o p tim a l... 23
2.5.2 Loi de co m m an d e... 24
2.6 Com paraison des alg o rith m e s... 25
2.7 M odélisation de l'a é ro c a p tu re ... 26
2.7.1 Modélisation de la d y n a m iq u e ... 26
2.7.2 Modélisation de l'environnem ent m a rtie n ... 29
2.7.3 Modélisation d u v é h ic u le ... 30
2.8 C o n c lu sio n ... 30
3 PROBLÉMATIQUE 33 3.1 Objectifs d u p ro je t... 33
I MODÉLISATION DE L'AÉROCAPTURE
35
4 DYNAMIQUE DE L'AÉROCAPTURE 37
4.1 Définition des repères ...39
4.1.1 Repère inertiel centré sur M a r s ...39
4.1.2 Repère o r b ita l... 39 4.1.3 Repère d u v e n t ... 40 4.1.4 Repère d u v é h ic u le ... 41 4.2 Définition des f o r c e s ... 42 4.2.1 Forces a é ro d y n a m iq u e s ... 42 4.2.2 G ra v ité ... 45
4.3 Dynam ique o rb ita le ... 45
4.4 Dynam ique de l'angle d'inclinaison ...46
4.5 C o n clu sio n ... 46
5 MODÉLISATION DE L'ENVIRONNEMENT MARTIEN 49 5.1 Modèle atm osphérique s im p lif ié ... 49
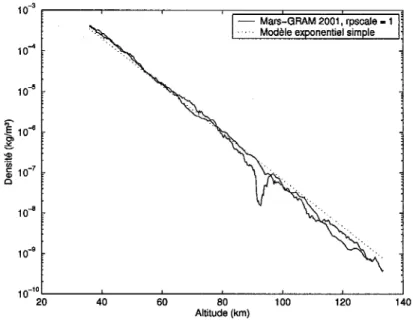
5.2 Mars-GRAM 2001 ... 49
5.3 C o n clu sio n ... 52
II AUGMENTATION DE L' AD APTATIVITÉ DU APC
53
6 ADAPTATION DE LA VITESSE DE TRANSITION 55 6.1 Impact de la modification de la vitesse de tr a n s itio n ... . 556.2 Algorithme d 'a d a p ta tio n ... 59
6.3 Validation conceptuelle... 61
6.4 C o n c lu sio n ... 63
7 ESTIMATION DU MODÈLE ATMOSPHÉRIQUE 65 7.1 Estimation de hs par convergence lo c a le ... 65
TABLE DES MATIÈRES vii
7.2 Régression l i n é a i r e ... 66
7.3 Estimation de hs p ar intégration de la d e n s ité ... 67
7.4 C o n c lu sio n ... 71
III SIMULATIONS
75
8 CONDITIONS DE SIMULATIONS 77 8.1 E n v iro n n e m e n t... 78 8.2 Caractéristiques d u v é h ic u le ... 78 8.3 États initiaux ... 79 8.4 N a v ig a tio n ... 80 8.5 G uidage et c o n trô le ... 818.6 Dynam ique de rotation d u véhicule ...82
8.7 C o n clu sio n ... 83
9 RÉSULTATS DES SIMULATIONS 85 9.1 Prédicteur-correcteur analytique o r i g i n a l ... 85
9.2 A daptation de l'altitude d 'é c h e lle ... 86
9.3 A daptation de la vitesse de t r a n s i t i o n ... 86
9.4 A daptation de la vitesse de transition et de hs ... 86
9.5 Conclusion . ... 87
10 ANALYSE DES RÉSULTATS 89 10.1 Im pact de l'adaptation de la vitesse de tra n s itio n ...89
10.2 Im pact de l'adaptation de l'altitude d 'é c h e lle ...92
10.3 Impact de l'adaptation de la vitesse de transition et de ha ...93
10.4 Com paraison d u tem ps de c a l c u l ... 93
IV CONCLUSION ET PERSPECTIVES
97
11 CONCLUSION 99
V ANNEXES
103
A PARAMÈTRES DE MARS-GRAM 105
B RÉSULTATS DES SIMULATIONS 107
B.l Prédicteur-correcteur analytique o r i g i n a l ... 108
B.2 A daptation de l'altitude d 'é c h e lle ... 116
B.3 A daptation de la vitesse de t r a n s i t i o n ... 124
B.4 A daptation de la vitesse de transition et de hs ... 132
LISTE DES FIGURES
2.1 Phases typiques de la capture orbitale aérodynam ique... 4
2.2 Définition de l'angle d'inclinaison de l'orbite... 5
2.3 Classification des algorithmes d'aérocapture... 6
2.4 Définition de l'angle d'inclinaison d u véhicule... 8
2.5 Correction de l'inclinaison de l'orbite i pour une trajectoire typique en fonc tion de la vitesse inertielle... 13
2.6 Structure de la loi de guidage pour le prédicteur-correcteur num érique. . . 17
2.7 Structure de la loi de guidage pour le contrôleur mixte ...21
2.8 Correction de l'orbite d u véhicule en sortie de l'atm osphère avec deux im pulsions... 28
4.1 Diagramme de corps libre d u véhicule... 37
4.2 Définition de l'angle d'inclinaison (j) en fonction de L, f et Vr... 38
4.3 Définition d u repère 1... 39
4.4 Définition d u repère 0... 40
4.5 Définition du repère W...41
4.6 Définition du repère B... 42
4.7 Définition des caractéristiques elliptiques de Mars...44
4.8 Schéma-bloc de la m odélisation de la dynamique de l'angle d'inclinaison d u véhicule... 47
4.9 Schéma-bloc de la modélisation dynam ique... 47
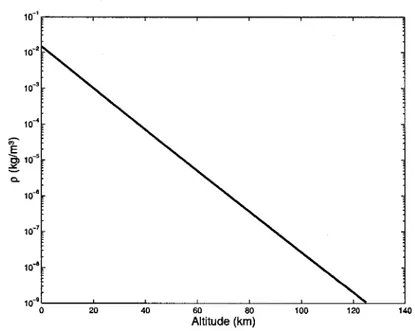
5.1 Densité en fonction de l'altitude pour le modèle exponentiel sim ple... 50
5.2 Densité en fonction de l'altitude pour Mars-GRAM 2001, rpscale = 0...51
5.3 Densité en fonction de l'altitude pour Mars-GRAM 2001, rpscale = 1...51
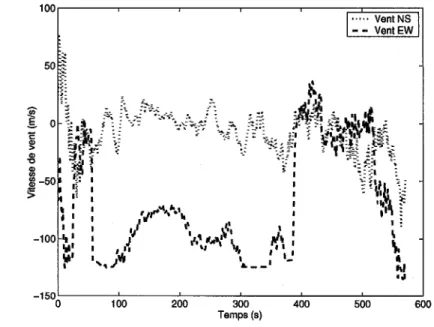
5.4 Composantes du vent p our une trajectoire d'aérocapture typique fourmes par Mars-GRAM 2001 avec rpscale — 1...52
6.1 Robustesse d u prédicteur-correcteur analytique à la variation de l'angle de vol initial... 57
6.2 Corridor d u prédicteur-correcteur analytique en fonction de la vitesse de
transition... 57
6.3 Schéma-bloc de l'algorithm e d'adaptation de la vitesse de transition...60
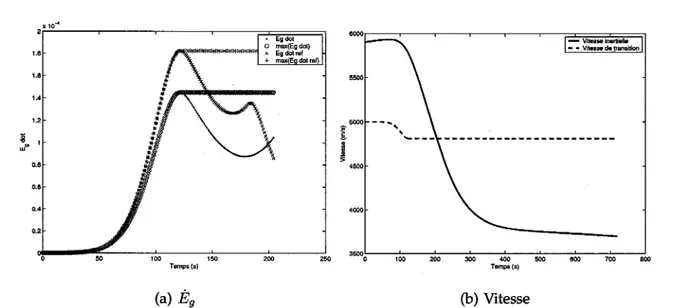
6.4 Èg et Tyrans en fonction du tem ps pour u n angle de vol initial inférieur aux conditions nominales (FPAini = —10.6°)... 62
6.5 Èg et V^ans en fonction du tem ps pour u n angle de vol initial supérieur aux conditions nominales (FPAini = —10.3°)... 62
6.6 Robustesse d u prédicteur-correcteur analytique modifié aux variations de l'angle de vol initial... 63
7.1 Estimation par convergence locale de l'altitude d'échelle pour des profils avec hs qui varie linéairement... 67
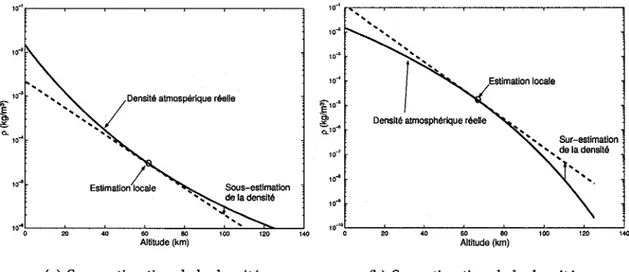
7.2 Profil de densité atm osphérique pour u n modèle exponentiel simple avec hs variable... 70
7.3 Estimation de l'altitude d'échelle p ar intégration et altitude d'échelle locale en fonction de l'altitude... 70
7.4 Estimation d u facteur d'échelle p our une trajectoire typique... 72
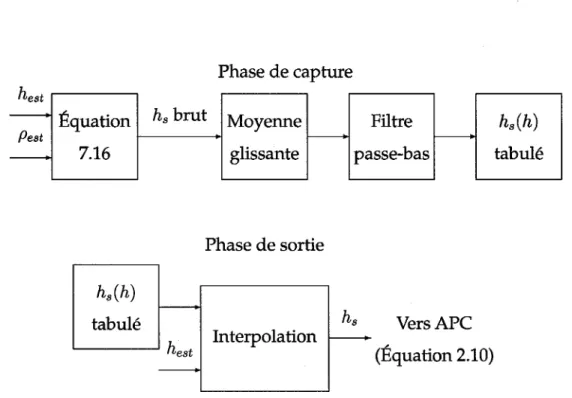
7.5 Schéma-bloc de l'algorithm e d'estim ation de l'altitude d'échelle... 72
8.1 Représentation schématique d u sim u la te u r...84
10.1 Robustesse d u prédicteur-correcteur analytique original et avec adaptation de la vitesse de transition à la variation de l'angle de vol initial... 91
10.2 Robustesse d u prédicteur-correcteur analytique original et avec adaptation de la vitesse de transition à la variation de la vitesse initiale...91
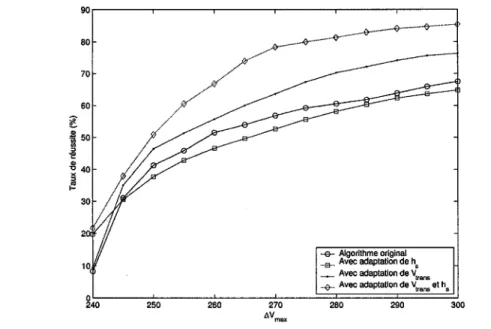
10.3 Taux de réussite en fonction du utilisé comme critère de réussite pour les quatre algorithm es... 92
10.4 Robustesse d u prédicteur-correcteur analytique original et avec adaptation de la vitesse de transition et de l'altitude d'échelle à la variation de l'angle de vol initial...94
10.5 Robustesse d u prédicteur-correcteur analytique original et avec adaptation de la vitesse de transition et de l'altitude d'échelle à la variation de la vi tesse initiale... 94
B.l Robustesse du prédicteur-correcteur analytique à la variation de l'angle de vol initial... 108
B.2 Robustesse d u prédicteur-correcteur analytique à la variation de la vitesse initiale... 109
LISTE DES FIGURES xi
B.3 Robustesse d u prédicteur-correcteur analytique à la variation d u facteur de perturbations... 110 B.4 Robustesse d u prédicteur-correcteur analytique à la variation de la masse. .111 B .5 Robustesse d u prédicteur-correcteur analytique à la variation d u coefficient
de portance...112 B.6 Robustesse d u prédicteur-correcteur analytique à la variation d u coefficient
de traînée...113 B.7 Robustesse du prédicteur-correcteur analytique à la variation d u bruit sur
la portance...114 B.8 Robustesse du prédicteur-correcteur analytique à la variation d u bruit sur
la traînée... 115 B.9 Robustesse d u prédicteur-correcteur analytique avec adaptation de l'alti
tude d'échelle à la variation de l'angle de vol initial... 116 B.10 Robustesse d u prédicteur-correcteur analytique avec adaptation de l'alti
tude d'échelle à la variation de la vitesse initiale... 117 B .ll Robustesse d u prédicteur-correcteur analytique avec adaptation de l'alti
tude d'échelle à la variation d u facteur de perturbations... 118 B.12 Robustesse du prédicteur-correcteur analytique avec adaptation de l'alti
tude d'échelle à la variation de la m asse... 119 B.13 Robustesse du prédicteur-correcteur analytique avec adaptation de l'alti
tude d'échelle à la variation du coefficient de portance... 120 B.14 Robustesse d u prédicteur-correcteur analytique avec adaptation de l'alti
tude d'échelle à la variation d u coefficient de traînée... 121 B.15 Robustesse du prédicteur-correcteur analytique avec adaptation de l'alti
tude d'échelle à la variation d u bruit sur la portance... 122 B.16 Robustesse d u prédicteur-correcteur analytique avec adaptation de l'alti
tude d'échelle à la variation du bruit sur la traînée... 123 B.17 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition à la variation de l'angle de vol initial... 124 B.18 Robustesse du prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition à la variation de la vitesse initiale... 125 B.19 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi
B.20 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi tesse de transition à la variation de la masse. . ...127 B.21 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition à la variation d u coefficient de portance...128 B.22 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition à la variation d u coefficient de traînée... 129 B.23 Robustesse du prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition à la variation du bruit sur la portance...130 B.24 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition à la variation d u bruit sur la traînée... 131 B.25 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition et de l'altitude d'échelle à la variation de l'angle de vol initial... 132 B.26 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition et de l'altitude d'échelle à la variation de la vitesse initiale. 133 B.27 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition et de l'altitude d'échelle à la variation d u facteur de per turbations... 134 B.28 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition et de l'altitude d'échelle à la variation de la m asse 135 B.29 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition et de l'altitude d'échelle à la variation d u coefficient de portance...136 B.30 Robustesse du prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition et de l'altitude d'échelle à la variation d u coefficient de traînée... 137 B.31 Robustesse d u prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition et de l'altitude d'échelle à la variation d u bruit sur la portance...138 B.32 Robustesse du prédicteur-correcteur analytique avec adaptation de la vi
tesse de transition et de l'altitude d'échelle à la variation du bruit sur la traînée... 139
LISTE DES TABLEAUX
2.1 Tableau comparatif des algorithmes a c tu e ls ...26 6.1 Corridor admissible en fonction de la vitesse de transition po u r le APC . . . 58 7.1 Com paraison des algorithmes d'estim ation de l'altitude d'échelle... 73 8.1 Valeur nominale et variabilité des param ètres d'environnem ent en sim ula
tion. Variabilités en valeurs absolues... 79 8.2 Valeur nominale et variabilité des caractéristiques d u véhicule en simulation. 79 8.3 Valeur nominale et variabilité des param ètres initiaux de la trajectoire en
sim ulation . ... 80 8.4 Bruit de mesure des états et de l'accélération... 80 8.5 Paramètres d u contrôleur en sim ulation... 82 8.6 Saturation des actionneurs et gains du contrôleur de l'angle d'inclinaison. . 83 10.1 Com paraison d u tem ps de calcul requis pour chaque algorithm e... 95 A .l Paramètres de Mars-GRAM 2001... 105
CHAPITRE 1
INTRODUCTION
A u cours des prochaines décennies, de nombreuses missions d'exploration planétaire de vraient nous perm ettre d 'en apprendre un peu plus sur le système solaire qui nous en toure. Cependant, le nombre de ces missions est limité par leur coût élevé et de nom breux efforts sont investis afin de dim inuer le coût de l'exploration planétaire. Ce coût étant gé néralem ent proportionnel à la masse du véhicule spatial requis po u r la m ission et la masse des véhicules spatiaux étant limitée par la capacité des lanceurs, minim iser la masse du véhicule lui-même et celle du propergol requis perm et de maximiser la masse de la charge utile pouvant être transportée. La rentabilité scientifique des missions d'explorations s'en trouve alors d 'au tan t augmentée.
Le propergol transporté par u n véhicule spatial dans une mission d'exploration planétaire est, dans la plu p art des cas, essentiellement utilisé pour freiner le véhicule, afin de le faire passer d 'u n e trajectoire héliocentrique vers une orbite centrée sur le corps céleste d 'in té rêt. Dans le cas où l'on désire placer en orbite u n véhicule spatial autour d 'u n corps céleste possédant une atmosphère, il est possible d'utiliser la traînée aérodynam ique générée par le passage d u véhicule à haute vitesse à travers l'atm osphère p our freiner le véhicule et assurer sa mise en orbite, processus appelé « aérocapture ». L'utilisation du propergol dans ce cas se limite donc à des corrections d'orbite en sortie de l'atm osphère, ce qui peut dim inuer de façon très significative la masse de propergol requise po u r le succès de la mission. L'application de cette technique pourrait être particulièrement rentable dans le cadre de l'exploration martienne, vu la densité relativement élevée de l'atm osphère de la planète rouge.
Cette technique n'est cependant pas sans risques. La grande variabilité de l'atm osphère martienne, la piètre connaissance que nous avons de cette atm osphère et des erreurs de navigation peuvent engendrer l'écrasem ent d u véhicule sur la planète, la désintégration
d u véhicule suite à des charges therm iques ou aérodynam iques trop im portantes ou une sortie précoce d u véhicule de l'atm osphère. D'ailleurs, le niveau de risque a jusqu'à m ain tenant toujours été jugé trop im portant pour que cette technologie soit utilisée en mission. Le développem ent d'algorithm es de comm ande fiables et robustes capables de compléter une m ission utilisant l'aérocapture avec u n niveau de risque réduit est donc essentiel. Ces algorithm es se doivent de plus d'être pleinem ent autonomes, puisque le délai de commu nication avec Mars (de l'ordre de 15 à 20 minutes) empêche toute rétroaction provenant de la Terre pendant l'aérocapture.
Le présent projet de recherche traite donc de m éthodes p our dim inuer le risque des m is sions utilisant l'aérocapture en m ettant au point des algorithmes de contrôle et de gui dage plus perform ants que ce qui a été développé jusqu'à maintenant. Ce mémoire traite d 'abord de l'état de l'art dans le domaine en présentant les algorithmes et les outils de m odélisation déjà disponibles. Cette recherche bibliographique amènera ensuite à définir la problém atique à résoudre et les objectifs d u projet.
Les chapitres suivants présentent les contributions apportées dans ce projet, soit d'abord la m odélisation d u problème, utilisée afin d'évaluer les performances des algorithmes existants et de leurs améliorations, présentée dans la première partie. La deuxième partie présente ensuite ces améliorations et la troisième partie présente et analyse les sim ula tions effectuées afin de valider les modifications proposées. Le mémoire term ine finale m ent p ar une discussion des contributions apportées et des perspectives po u r des travaux futurs.
CHAPITRE 2
ÉTAT DE L’ART
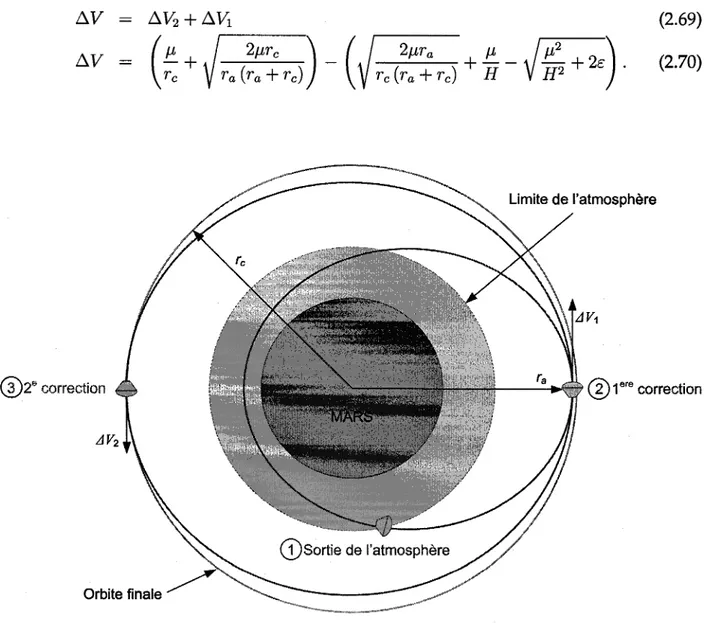
Le b u t principal d'une m anoeuvre d'aérocapture consiste à placer u n véhicule avec un faible rapport portance sur traînée (sans ailes ou surfaces de contrôle) dans des conditions de sortie de l'atm osphère désirées en fonction des conditions d'entrée dans l'atm osphère. Ces conditions de sortie doivent être optimisées afin de minimiser l'im pulsion requise en sortie de l'atm osphère pour am ener l'orbite d u véhicule vers les spécifications orbitales de la mission. Typiquement, une séquence complète d'aérocapture peut être représentée en cinq phases, telles que présentées à la figure 2.1. Ces cinq phases sont :
1. L'approche
2. L'entrée dans l'atm osphère 3. Les m anoeuvres d'aérocapture 4. La sortie de l'atm osphère
5. Les propulsions p our corrections finales de l'orbite.
Les conditions désirées à la sortie de l'atm osphère se résum ent généralement à u n rayon à l'apoapside ra (distance maximale entre le véhicule et le centre de la planète) et à u n angle d'inclinaison de l'orbite (figure 2.2) qui doivent respecter certaines spécifications. Ces spécifications doivent être calculées afin de minimiser l'im pulsion (A V) nécessaire po u r ram ener le véhicule vers son orbite finale, définie par la mission d u véhicule.
Le respect des conditions de sortie s'effectue en contrôlant l'altitude d u véhicule. Une tra jectoire à travers une altitude plus faible, où l'atm opshère est plus dense, entraînera une plus grande perte d'énergie. À l'inverse, une trajectoire en plus haute atm osphère occa sionnera moins de perte d'énergie, donc une énergie orbitale plus im portante en sortie de l'atmosphère.
1 - Approche ' X Limite de l’atmosphère 2 / Entrée atmosphérique 3 - Capture i aérodynamique MARS 4 - Sortie de 'atmosphère 5 - Propulsions pour corrections
Rayon d’orbite final désiré
Figure 2.1 - Phases typiques de la capture orbitale aérodynamique. Inspiré de [Ro et Queen, 1998].
5
orbite
c
»
Figure 2.2 - Définition de l'angle d'inclinaison de l'orbite. - Le prédicteur-correcteur analytique (Analytical Predictor-Corrector ou APC), - Le contrôleur d'énergie (Energy Controller ou EC),
- Le prédicteur-correcteur num érique (Numerical Predictor-Corrector ou NPC), - Le contrôleur de conditions term inales (Terminal Point Controller ou TPC), - Le contrôleur mixte (Blended-Control ou BC).
Tel que présenté à la figure 2.3, ces m éthodes peuvent être classées essentiellement en deux grandes familles, soit les algorithmes d u type prédicteur-correcteur et les algo rithm es avec trajectoire prédéfinie.
Les algorithmes d u type prédicteur-correcteur anticipent en tem ps réel les conditions de sortie d u véhicule pendant son passage dans l'atm opshère et adaptent conséquem ment les lois de guidage et de contrôle afin de minimiser l'erreur entre les conditions de sortie prédites et les conditions de sortie désirées. Ce type d'algorithm e regroupe deux classes, soit les algorithmes analytiques et les algorithmes numériques.
Dans le cas des algorithmes analytiques, certaines hypothèses sont utilisées p our obtenir des équations analytiques fournissant la prédiction des conditions de sortie. Ce type d 'al gorithm e présente l'avantage d'être précis, puisqu'il s'adapte en tem ps réel. Il est aussi peu gourm and en term es de charge de calcul puisque seules des relations analytiques explicites sont à résoudre pour prédire les conditions de sortie. Toutefois, la robustesse de ce genre d'algorithm es est moyenne, suite aux hypothèses qui doivent inévitablem ent être posées.
Prédicteurs-correcteurs Analytiques APC EC ^ Précis Simple El Robustesse moyenne Numériques NPC [El Complexe E3 Peu précis El Robustesse faible Trajectoire prédéfinie
r>
Simple Robuste El Peu précisFigure 2.3 - Classification des algorithmes d'aérocapture.
Les prédicteurs-correcteurs num ériques, quant à eux, anticipent les conditions de sortie num ériquem ent, en sim ulant à bord la partie restante de la trajectoire. Ces algorithmes présentent l'inconvénient d'être très lourds en calcul. Par conséquence, le nombre d 'itéra tions qu'il est possible de réaliser pendant la m anoeuvre d'aérocapture est limité. Comme le nom bre d'itérations est faible et que le tem ps de réponse est conséquemment im por tant, ce genre d'algorithm e s'avère peu précis et peu robuste.
En plus des algorithmes du type prédicteur-correcteur, on retrouve les algorithmes avec trajectoire prédéfinie. Ce genre d'algorithm e utilise une trajectoire jugée optimale, définie
a priori, qui devrait minimiser l'im pulsion requise afin de corriger l'orbite en sortie. Le vé hicule tente alors de coller à cette trajectoire autant que possible. Les algorithmes à trajec toire prédéfinie présentent l'avantage d'être peu exigeants en calcul, puisque la trajectoire de référence est tabulée avant le lancement. Il s'agit aussi d 'u n type d'algorithm e robuste, puisque la trajectoire de référence perm et facilement au véhicule de converger vers des conditions près des conditions optimales. Cependant, comme cette m éthode n 'est nulle m ent adaptative, toute erreur entre le modèle utilisé pour générer la trajectoire de réfé rence et les conditions réelles se répercute directement sur les conditions terminales. Par
2.1. LE PRÉDICTEUR-CORRECTEUR ANALYTIQ U E 7
conséquence, ce genre d'algorithm e peut s'avérer imprécis dans des conditions réelles. Toutes ces techniques, mis à p art le contrôleur mixte, n'utilisent que l'angle d'inclinai son 0 du véhicule comme param ètre de commande. L'angle d'inclinaison d u véhicule est l'angle que fait que le vecteur portance d u véhicule avec le plan qui contient la verticale et la vitesse relative du véhicule (figure 2.4). Cet angle définit l'orientation d u véhicule par rapport à sa vitesse relative Vr. Il est cependant im portant de ne pas confondre l'angle
d'inclinaison d u véhicule 0 avec l'inclinaison de l'orbite i, qui est plutôt une caractéris tique de l'orbite.
Com m ander 0 perm et donc d'orienter la portance L du véhicule. La composante de la portance dans la direction verticale (direction définie par le poids W ) a u n im pact sur la vitesse verticale d u véhicule, ce qui perm et d'avoir le contrôle sur l'altitude d u véhi cule. Comme les conditions atm osphériques sont fonction de l'altitude d u véhicule, la grandeur de la traînée D est donc influencée par l'angle d'inclinaison.
La m éthode d u contrôleur mixte est légèrement différente des autres m éthodes puis qu'elle considère aussi l'angle d'attaque a comme param ètre de contrôle. Faire varier cet angle perm et de m oduler la grandeur de la portance et de la traînée sim ultaném ent pour une même vitesse relative.
La présente section présente donc tout d'abord plus en détail l'essentiel d u contenu de chacun de ces cinq algorithmes. De plus, comme ces algorithmes et leurs améliorations devront être validés en simulation, une étude des outils disponibles pour simuler ce genre de trajectoire est aussi présentée.
2.1 Le prédicteur-correcteur analytique
Le prédicteur-correcteur analytique est tout d'abord présenté dans [Cerimele et Gamble, 1985] et dans [Gamble et coll., 1988] dans le cadre de la mission Aeroassist Flight Expe- riment. Cette mission avait pour objectif la validation de l'aérocapture po u r effectuer un transfert d'orbite autour de la Terre. Le prédicteur-correcteur analytique a ensuite été
ap-\
Figure 2.4 - Définition de l'angle d'inclinaison du véhicule.
pliqué au contexte m artien dans [Bryant et coll., 1998] p our la mission Mars 2001 puis finalem ent dans [Masciarelli et coll., 2000] et [Perot et coll., 2001] dans le cadre de la m is sion Mars Sample Return.
Cet algorithm e prédit analytiquem ent les conditions de sortie pendant la m anoeuvre d'aérocapture. Cette prédiction est alors comparée avec les conditions désirées po u r ainsi corriger la loi de guidage actuelle afin de faire tendre les prédictions vers les conditions désirées. Cet algorithme contient deux phases, soit la capture (capture phase) et la sortie
(exit phase). Ces phases perm ettent d'atteindre la spécification sur le rayon à l'apoapside en sortie. Cependant, il est possible que certaines missions nécessitent aussi une spéci fication sur l'angle d'inclinaison de l'orbite. L'angle d'inclinaison de l'orbite est l'angle que fait l'orbite d u véhicule avec le plan équatorial de la planète, à ne pas confondre avec l'angle d'inclinaison d u véhicule, qui est l'angle que le véhicule a autour d 'u n axe paral lèle à sa vitesse. Une modification à l'algorithm e est donc aussi présentée afin de tenir compte de spécifications sur l'inclinaison de l'orbite. Le développem ent de la technique présenté dans cette section est tiré en grande partie de [Perot et coll., 2001].
2.1. LE PRÉDICTEUR-CORRECTEUR ANALYTIQ U E 9
2.1.1 Phase de capture
Au cours de la première phase, la phase de capture, l'algorithm e fait tendre la décélération d u véhicule vers une décélération de référence dref. Cette décélération est calculée afin de perm ettre u n vol à l'équilibre (accélération radiale nulle) tout en étant dans une zone de manoeuvrabilité. En supposant u n modèle aérodynam ique simple :
L = qSCL (2.1)
D = qSCD (2.2)
où L est la grandeur de la portance d u véhicule, D la grandeur de la traînée, q la pression dynam ique de l'écoulement, S la surface frontale du véhicule, Cl le coefficient de por
tance du véhicule et Cd le coefficient de traînée. En supposant u n angle entre la vitesse
d u véhicule et l'horizontale petit, l'accélération radiale du véhicule est définie comme : dVr V 2 , L cosfi
j T = 9 + - (2.3)
dt r m
où g est l'accélération gravitationnelle locale, m la masse d u véhicule, V la vitesse iner- tielle d u véhicule et r la distance entre le centre de la planète et le centre de masse du véhicule. L'angle d'inclinaison (f>eq perm ettant le vol à l'équilibre est ainsi donné par :
m ( P 2\
cos</,»« = c^ s (s - t J - (2-4)
La pression dynam ique qref requise pour m aintenir le véhicule à l'équilibre devient alors :
1 m ( V 2\ m ( P 2\
W = cos (peqCLS \ g r ) = K 7T~5 9CLS \ --- • r J (2.5)
K est un facteur perm ettant de déterm iner à quel point le vecteur de portance sera utilisé pour m aintenir le véhicule dans un vol à l'équilibre. Plus K est élevé, plus cos 0 devra être petit po u r m aintenir le véhicule dans cette condition d'équilibre, ce qui laisse au véhicule une plus grande plage de manoeuvrabilité. Pour la valeur m inimale K = 1, toute la portance est requise afin de conserver le véhicule à l'équilibre. Une valeur typique est
K = 1.5, ce qui représente 0 « 45°.
La décélération de référence dref engendrée lorsque le véhicule est soumis à qref est ainsi :
.CD ( V2
L'angle d'inclinaison comm andé 4>cmd au cours de cette phase est défini autour de <peq,
mais fait tendre la perte d'altitude h, vers 0 et fait tendre la décélération m esurée d vers la décélération de référence :
COS (ftona = cos (f)eq - G h 1^4- Gd ^ ref^j (2.7)
où Gh! et Gd sont des gains à ajuster. Cette phase se déroule à partir de l'entrée dans l'at m osphère jusqu'à une vitesse de transition Vtrans définissant la transition vers la deuxième phase, soit la phase de sortie.
2.1.2 Phase de sortie
A u cours de la deuxième phase, la vitesse de montée du véhicule est contrôlée afin de faire tendre le rayon à l'apoapside estimé de l'orbite d u véhicule en sortie de l'atm osphère vers la valeur désirée. O n asservit le véhicule vers une vitesse de m ontée href qui devrait am ener le véhicule à avoir les conditions de sortie voulues. Ainsi, (j>cmd est défini par :
COS (frcmd = cos 4>eq - Gh2 ^ (2.8)
avec Gh2 comme gain à ajuster. Le calcul de href suppose u n profil de densité atm osphé rique p(h) de la forme :
p{h) = pQe Ê (2.9)
où po est une densité de référence et hs une altitude d'échelle. En supposant que le vé hicule suit href, u n calcul analytique perm et de prédire quelle serait la vitesse Vexu à la sortie de l'atm osphère et quelle serait la vitesse VdeSired requise à la sortie de l'atm osphère afin d'atteindre le rayon à l'apoapside ra désiré en sortie.
Pour y arriver, une estimation de la perte de vitesse AVaero due à la traînée (sans consi dérer l'effet de la gravité) est requise, en posant un profil de densité exponentiel et une vitesse de montée constante jusqu'à la sortie :
A V a e r o = ~ n \ • ( 2 . 1 0 )
1 href
2.1. LE PRÉDICTEUR-CORRECTEUR ANALYTIQ U E 11
Il est ensuite possible d'estim er la vitesse à la sortie de l'atm osphère V^u en ajoutant la perte de vitesse due à la gravité pour une planète de potentiel gravitationnel sphérique :
Vexit = A / V 2 + 2(1 ( — - - ) + AKero (2.11)
\Texit r j
où rexu est le rayon à la sortie de l'atm ophère, r le rayon actuel, n la constante gravita tionnelle de la planète et V la vitesse inertielle actuelle. L'estimation la vitesse radiale à la sortie de l'atm osphère VTexii est obtenue en supposant une accélération radiale constante égale à (VgXit/ r exit - 9exit) où gexit est l'estim ation de l'accélération gravitationnelle en sor tie de l'atm osphère. Cette accélération correspond à l'accélération radiale du véhicule en l'absence d'atm osphère. Cette hypothèse devient donc valide à m esure que le véhi cule s'approche de la sortie de l'atm osphère et évolue dans une atm osphère de m oins en moins dense. Ainsi, la vitesse radiale à la sortie devient :
Vr„t, = ,/ftîe, - 2 - - # - ) (r - ra lt). (2.1 2)
\ ' e x it l ex it /
À partir de cette valeur, l'application d u théorème de la conservation de la quantité de m ouvem ent angulaire orbitale et de la conservation de la quantité d'énergie perm et d 'o b tenir quelle serait la vitesse désirée Vdesired qui perm ettrait d'atteindre ra :
Vdesired —
\
r 2 / 1 Vr2 I PW.'t.T +2(1 a• |Vl2 1 M /V» ( ' ex it \ 1 a 1 ^ 13) î -r 2exitCes résultats perm ettent de calculer une valeur de référence corrigée href[k + 1] p ar la
m éthode de N ewton-Raphson à partir de la valeur actuelle href[k] :
(2-14)
$href
Les dérivées partielles sont données par :
SVexi, AV* dhref hsd d V d e s ir e d h r e f d h r e f V ( i Tl *desired l 2 ^e x it (2.15) (2.16)
La vitesse de m ontée de référence ainsi calculée devrait amener le véhicule vers le rayon à l'apoapside visé en sortie, calculé afin de minimiser l'im pulsion requise p our atteindre l'orbite de la mission. Cependant, si on désire aussi respecter une spécification sur l'in clinaison de l'orbite, on doit tenir compte d 'u n autre param ètre, soit le signe de l'angle d'inclinaison d u véhicule.
2.1.3 Correction de l'inclinaison de l'orbite
Pour le contrôle de l'inclinaison de l'orbite, on considère découplées la dynam ique dans le plan orbital et la dynam ique latérale. Le contrôle latéral s'effectue en inversant périodi quem ent le signe de ÿcmd (manoeuvre comm uném ent appelée roll-reversal maneuver). On conserve alors la même composante de portance dans le plan orbital, mais on p eu t contrô ler la dynam ique latérale avec la direction de L. Cette m anoeuvre est utilisée afin de res treindre l'inclinaison de l'orbite à l'intérieur d 'u n e certaine plage de tolérance Aiauowabie autour de l'angle d'inclinaison visé iref :
AiallOWable(l^) = Hiax [Aîmin, Aîmjn + ü (V Vmin)] (2.17)
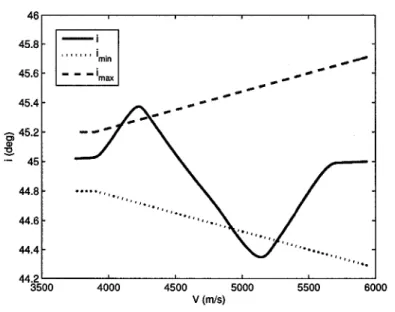
où la pente a, la spécification en fin de trajectoire Aimin et la vitesse p our l'atteinte des spécifications V^n sont définies a priori. Un exemple de contrôle de l'inclinaison de l'orbite p o u r une trajectoire typique est présenté à la figure 2.5. Sur cette figure, on peut voir l'effet de l'inversion périodique d u signe de lorsque l'inclinaison de l'orbite d u véhicule traverse la tolérance définie en fonction de la vitesse. Le véhicule doit être à l'intérieur de la zone de tolérance en fin de trajectoire, à faible vitesse.
Cette façon de gérer l'inclinaison de l'orbite fait aussi partie de d'autres algorithmes d'aé- rocapture, dont entre autres le contrôleur d'énergie.
2.2
Le contrôleur d'énergie
La deuxième m éthode, le contrôleur d'énergie, est présentée dans [Gamble et coll., 1988] dans le contexte de la mission Aeroassist Flight Experiment. Elle a ensuite été appliquée au
2.2. LE CONTRÔLEUR D'ÉNERGIE 13 45.8 min 45.6 45.4 • s 45.2 44.1 44.6 44.4 44.2 3500 4000 4500 5000 5500 6000 V (m/s)
Figure 2.5 - Correction de l'inclinaison de l'orbite i pour une trajectoire typique en fonc tion de la vitesse inertielle.
contexte m artien dans [Rousseau, 2001] po u r la mission Mars Sample Return. Le dévelop pem ent de l'algorithm e présenté ici est tiré en grande partie de [Rousseau, 2001].
Cette technique repose sur une valeur Eg appelée gain d'énergie (Energy Gain). Elle est définie comme :
E = E0e - f E°dt + EC& = Eg(t) (2.18)
où E est l'énergie orbitale totale du véhicule et Ec est l'énergie visée à la sortie de l'at mosphère. D urant le passage en basse atmosphère, où a lieu la majeure partie de la perte d'énergie, Rousseau conclut que l'évolution de Eg p eu t être considérée comme linéaire, de sorte que le gain Eg peut être approximé par :
Eg = Ego + Êgt (2.19)
(voir section 2.1.2), il est possible d'obtenir une relation donnant h et h à. partir de E g : h = hsA = f ( E g, È g) (2.20) = g(Ea, É„) (2.21) h = hs
£° + 't ) + (1+24 |B
_ E n E A _ V J9 A — Eg - + — ^ 1 + 2— ) (2.22) B-Une fois la zone de haute pression dynam ique et de haute perte d'énergie terminée, le gain d'énergie tend vers une valeur constante. Ainsi, en posant que le gain à la sortie
Egex est approxim ativem ent égal au gain actuel E g(t), il est possible de calculer le para m ètre de comm ande È9c requis p our atteindre le rayon à l'apoapside désiré en sortie de l'atm osphère :
È ,‘ = ~2 ( y 1 + _ 1 1 <2-24)
/>« = - 4 + 24 iy»0 ( E + ~ )\ (V* / (2.25)
' e x ex \ ' a /
où hex est l'accélération en altitude prédite à la sortie de l'atm osphère et rex le rayon en sortie de l'atmosphère.
Le calcul d u gain d'énergie nécessite aussi l'énergie orbitale visée E c. Le calcul de E c se fait en supposant que le rayon au périapside rp actuel est identique au rayon au périapside en sortie. Le calcul d u rayon au périapside suppose une orbite képlérienne (orbite sans perturbations, uniquem ent soumise à la gravité) à partir de la position actuelle. Avec ce résultat, il est possible d'obtenir E c :
Ec = — (2. 26)
ra + rp
Ces résultats sont utilisés afin de calculer une vitesse de montée de comm ande hc et une décélération de comm ande dc, comme dans le cas d u prédicteur-correcteur analytique.
2.2. LE CONTRÔLEUR D'ÉNERGIE 15
Ces valeurs sont utilisées pour calculer l'angle d'inclinaison comm andé 4>cmd '•
cos (frcmd, — cos <f>c ~j~ G ^^h hc^ H- Gd (fi fie) • (2.27)
Cependant, dans ce cas-ci, l'angle d'inclinaison de commande ç iw est défini autour d 'u n angle d'inclinaison de référence </>c, calculé afin d'am ener le véhicule vers E c en sortie de l'atm osphère :
m (■■ V 2 u \
cos0c = + (2.28)
hc = g(Et ,È t .). (2.29)
De la même façon, hc est aussi calculé afin d'atteindre les conditions énergétiques dési rées :
hc = f(E„, 4 „ ) . (2.30)
La décélération de comm ande dc est quant à elle définie à partir de E9c :
Egc — EgCQ + Ègct (2.31)
dc = E9°(Ev ~ Ec\ (2.32)
La valeur de Eg est u n choix de conception qui a u n impact sur la robustesse et la pré cision de l'algorithme. Une valeur plus élevée augmente la robustesse, mais dim inue la précision de l'algorithme. En pratique, une borne inférieure et une borne supérieure de
E9c sont imposées. En effet, en début et en fin de trajectoire, l'hypothèse de l'évolution li néaire d u gain d'énergie ne tient plus et la valeur de E gc doit être bornée afin d'em pêcher sa divergence.
La correction de l'inclinaison de l'orbite pour le contrôleur d'énergie s'effectue exacte m ent de la m ême façon que pour le prédicteur-correcteur analytique (voir section 2.1.3). Finalement, dans sa présentation de l'algorithm e, Rousseau propose aussi une m éthode d'estim ation d u modèle atm osphérique en utilisant u n modèle exponentiel simple, de la forme :
—(h—h(\)
En effet, en utilisant le logarithme de ce modèle, on obtient une droite :
ln p = —- (h — ho) 4- ln p0 ■£=>• y = fnx + b. (2.34)
flg
En utilisant l'ensemble des valeur de p et de h estimées, on peut identifier le m eilleur
Po et le meilleur h s au sens des m oindres carrés en effectuant une régression linéaire sur
l'ensem ble des valeurs de densité et d'altitude estimées à chaque itération d u contrôleur. En conclusion, cet algorithme ressemble au prédicteur-correcteur analytique en ce sens qu'il définit des valeurs d'angle d'inclinaison, de vitesse de montée et de décélération de référence qui sont adaptées en fonction de prédictions analytiques des conditions de sortie. Le contrôleur d'énergie utilise cependant les conditions énergétiques d u véhicule p o u r effectuer ses prédictions, alors que le prédicteur-correcteur analytique se base plutôt sur la grandeur des composantes de la vitesse d u véhicule. Il existe cependant u n autre type de prédicteur-correcteur, qui utilise plutôt une prédiction num érique des conditions de sortie.
2.3 Le prédicteur-correcteur numérique
Une version simple d u prédicteur-correcteur num érique est tout d'abord présentée dans [Gamble et coll., 1988] dans le cadre de la mission Aeroassist Flight Experiment. Des ver sions ont ensuite été mises au point p our l'entrée atm osphérique terrestre ([Kaluzhskikh et Sikharulidze, 2000]) et l'entrée atm osphérique m artienne ([Powell, 1998]). Cette tech nique a finalement été adaptée à l'aérocapture m artienne dans [Berges et coll., 2001] pour la m ission Mars Sample Return.
Cet algorithme estime en tem ps réel les conditions à la sortie de l'atm osphère en suppo sant que les param ètres de comm ande dem eurent constants jusqu'en sortie. Cependant, dans ce cas, c'est une loi de commande q u'on suppose constante pour le reste de la trajec toire. Cette loi de comm ande (voir figure 2.6) dicte l'angle d'inclinaison de référence 4>o et les m om ents v\ et 1/2 où s'effectuent l'inversion de signe de 4>cmd, requis pour le contrôle
2.3. LE PRÉDICTEUR-CORRECTEUR NUMÉRIQUE 17
Inclinaison (®and)
exit actuel
Figure 2.6 - Structure de la loi de guidage pour le prédicteur-correcteur num érique. Ces moments ne sont pas définis en termes de tem ps, mais plutôt en term es de perte de vitesse u(t). La variable indépendante u(t) est définie comme :
D
v (t) = / —dt. (2.35)
J o m
L'utilisation de cette variable indépendante perm et, entre autres, de naturellem ent ré duire le pas d'intégration dans les régions où la perte de vitesse est im portante et de l'augm enter là où il n 'y a pratiquem ent plus de perte de vitesse. La loi de comm ande
<j)ciy) est donc définie par trois param ètres :
0c(i/) = f(00; Vu V2), V G \yactu el > ^ exit] (2.36)
et s'applique à partir de la perte de vitesse actuelle uactuei jusqu'à la perte de vitesse uexit
à la sortie. Le profil de la loi de comm ande peut tenir compte d 'u n e m odélisation de la réponse dynam ique de l'angle d'inclinaison d u véhicule, en im posant une saturation sur
<p et 0. Cette loi de comm ande est optimisée pendant les m anoeuvres d'aérocapture afin d'am ener le véhicule vers les param ètres orbitaux souhaités.
2.3.1 Optimisation de la loi de commande
1. Prédiction d u rayon à l'apoapside ra et de l'inclinaison de l'orbite i avec la loi de comm ande actuelle (voir section 2.1.2).
2. Si la prédiction ne rem plit pas les spécifications, correction de la loi de comm ande afin d'atteindre les spécifications.
Dans le cas où une correction est requise, deux param ètres supplémentaires sont considé rés :
1. Ae, qui modifie le m om ent de l'inversion de signe de 4>cmci
2. A(3, qui modifie la valeur de l'angle d'inclinaison du véhicule de référence 0O.
La loi de comm ande devient alors :
0c(i/) — f{4>o + vi + Ae, v2). (2.37)
Pour déterm iner Ae et A/?, il faut calculer trois trajectoires :
1. U n rayon à l'apoapside rao et une inclinaison d'orbite i0 en considérant la loi de
com m ande actuelle :
M " ) = f(<f>0,^1, ^ )
2. Un rayon à l'apoapside rai et une inclinaison d'orbite i\ en considérant u n incrément
8j3 de (j)o :
M v ) = f(<l>0 + ^ , U l , V 2 )
3. Un rayon à l'apoapside ra2 et une inclinaison d'orbite i2 en considérant u n incrément
Se de vi :
M u) = }{<!>o,vi + ôe,v2).
La prédiction des conditions se fait en intégrant num ériquem enent la dynam ique d u vé hicule jusqu'en sortie pour ces 3 trajectoires.
2.3. LE PRÉDICTEUR-CORRECTEUR NUMÉRIQUE 19
Avec ces valeurs, il est possible d'approxim er les dérivées partielles de ra et i par rapport
à. P et e : dra d p dra de di dp di de rai ~ rap SP ra2 - rao 8e h — io s p *2 — *o ôe (2.38) (2.39) (2.40) (2.41)
Pour calculer les corrections A P et Ae à apporter à la loi de commande, il ne reste qu'à résoudre le système : r dra dra d p de di di . d p de . A p Ae + (2.42)
L'optimisation de la loi de commande se poursuit jusqu'à ce que r a et i prédits en sortie respectent les spécifications.
2.3.2 Intégration numérique
Pour prédire les conditions en sortie, le modèle dynam ique d u véhicule p ar rapport à la variable indépendante u est requis. Il peut être défini comme :
d f dt^-> — = — V (2.43) du du dV _ dt_ du du dV dt _ = — a (2.44) avec : dt _ m du D (2.45)
L'accélération a est donnée par la somme des accélérations aérodynam iques et de l'accé lération gravitationnelle locale g :
-> - D L a /’\
a = g H 1---. (2.46)
Dans la résolution d u système, il faut cependant considérer u n pas d'intégration variable en fin d'intégration. En effet, il est possible qu'à l'approche de la sortie de l'atm osphère, la densité devienne si faible qu'il soit impossible d'obtenir une perte de vitesse corres pondant au pas d'intégration. La perte maximale de vitesse qu'il est possible d'obtenir avec l'atm osphère restant est approximée, et la plus petite des deux valeurs (en valeur absolue) est utilisée comme pas d'intégration. Cette perte de vitesse minimale peut être approximée comme :
A*/min = --- ^ --- (2.47)
1
Vr Dha
/ïmax = \Jh? - 2 h (h - hexit). (2.48)
U n des avantages de cette m éthode est qu'elle p eu t tenir compte d 'u n modèle com plexe de gravité, d'atm osphère ou de la dynam ique de l'angle d'inclinaison d u véhi cule. Cependant, m ettre en place u n modèle plus complexe n'im plique pas nécessaire m ent une augm entation des performances. En effet, la faiblesse de cet algorithm e est déjà sa lourde charge de calcul, qui réduit le nom bre d'itérations qu'il est possible de réaliser pendant une m anoeuvre d'aérocapture. Même avec des représentations très sim plifiées de la réalité, cet algorithme dem eure très peu perform ant comparativem ent aux autres prédicteurs-correcteurs, qui utilisent une prédiction analytique. Les prédicteurs- correcteurs num ériques pourraient cependant être appliqués dans le cadre de scénarios de m ission légèrement différents, comme dans le cas du contrôleur mixte.
2.4 Le contrôleur mixte
Contrairem ent aux m éthodes présentées précédemment, le contrôleur mixte considère à la fois <p et l'angle d'attaque comme param ètres de contrôle. L'angle d'attaque a est défini comme l'angle de rotation d u véhicule autour d 'u n vecteur norm al à la vitesse et la portance d u véhicule. La m éthode est présentée dans [Jits, 2000], dans le contexte d 'u n e m ission m artienne habitée. Cette technique est basée sur le contrôleur d u type
prédicteur-2.4. LE CONTRÔLEUR MIXTE 21
correcteur num érique présenté dans [Powell et Braun, 1993], où seulem ent 4> est considéré comme param ètre de contrôle. Cette m éthode se rapproche donc d u prédicteur-correcteur num érique, mais diffère dans la structure de la loi de commande proposée.
Dans ce cas-ci, la loi de commande contient 4 paires de valeurs 0 et a et trois intervalles de tem ps entre chacune des paires. Ainsi les quatre paires d'angles sont appliquées suc cessivement séparées par trois intervalles de tem ps dictés par la loi de com m ande (voir figure 2.7). De plus, comme cet algorithme a été développé dans l'optique d 'u n e m ission habitée, l'algorithm e limite l'accélération maximale d u véhicule (max g-load).
500 1.3E+05 n 70 -i 1.2E+05 400 65 1.1E+05 300 1.0E+05 60 200 9.0E+04 100 E 7.0E+Û4 -« 50 .g 6.0E+04 CD (5 -100 5.0E+04 4 5 -4.0E+Q4 •200 b an k an g le alpha altitude 3.0E+04 •300 2.0E+04 3 5 -•400 1.0E+04 -O.OE+OO J 3 0 J -500 400 350 260 300 50 100 150 200 0 tim e, se c
(b) Bank angle and an g le of attack modulation
Figure 2.7 - Structure de la loi de guidage pour le contrôleur mixte. Tiré de [Jits, 2000].
Le guidage consiste à optim iser ces 11 param ètres (4 paires d'angles et 3 intervalles de temps) afin de faire tendre les conditions en sortie vers les conditions désirées et de m ini miser la quantité de propergol requise pour corriger l'orbite. L'algorithme cherche donc à minimiser une fonction de coût F (u) qui représente l'im pulsion requise pour circulariser l'orbite et corriger l'inclinaison de l'orbite en fonction des param ètres de com m ande u.
L'optimisation se fait en considérant des contraintes sur le rayon à l'apoapside, l'éner gie totale orbitale et l'inclinaison de l'orbite en sortie de l'atm osphère et sur une altitude minimale à respecter. Les quatre paires d'angles de commande correspondent à une dis crétisation de l'aérocapture en quatre parties, soit :
1. L'entrée atmosphérique. L'algorithme tente de converger vers une solution.
2. La zone de pression dynam ique maximale. On doit limiter à ce point-ci l'accéléra tion maximale.
3. La phase d'altitude constante. L'algorithme cherche à dissiper l'énergie mécanique d u véhicule.
4. La phase de sortie. L'algorithme se concentre sur le rayon à l'apoapside en sortie et sur l'inclinaison finale de l'orbite.
Dans l'éventualité où l'algorithm e ne peut converger vers une solution acceptable (qui entraînerait l'écrasem ent ou des conditions hyperboliques en sortie par exemple), des règles heuristiques afin de corriger les param ètres sont prévues.
Cet algorithm e semble potentiellemt plus robuste que le prédicteur-correcteur num érique présenté plus tôt, principalem ent à cause de la m anoeuvrabilité accrue d u véhicule dans ce scénario de mission. Cependant, la complexité de l'algorithm e n'est pas diminuée. D'ailleurs, selon [Jits, 2000], des simulations complètes d u contrôleur mixte nécessiterait environ 15 m inutes de tem ps de calcul sur u n processeur à 1 GHz pour une durée de vol d'environ 350 s. L'algorithme nécessiterait donc d'être grandem ent simplifié avant d'être utilisable sur u n contrôleur embarqué utilisant la technologie actuelle.
2.5 Le contrôleur de conditions terminales
La cinquième m éthode, le contrôleur de conditions terminales, a été développée po u r l'aérocapture m artienne dans [Ro et Queen, 1998], puis a été appliquée à la mission Mars Sample Retum dans [Perot et coll., 2001]. Elle se dém arque des autres m éthodes puisqu'elle utilise une trajectoire de référence définie a priori. La technique se limite donc à la concep tion d 'u n contrôleur optim al qui ram ène le véhicule vers cette trajectoire de référence. Le développem ent de la m éthode présentée ici est tiré principalement de [Perot et coll., 2001]. La théorie générale du contrôle optim al sous-jacente à cette m éthode est tirée de [Bryson et Ho, 1975].
2.5. LE CONTRÔLEUR DE CONDITIONS TERMINALES 23
2.5.1 Contrôleur optimal
Dans cette m éthode, une trajectoire de référence définie en term es d 'altitude h, de vitesse
V et d'angle de vol 7 de référence est utilisée. En considérant que cos 0 est le param ètre
de comm ande u, la dynam ique dans le plan orbital du système peut être définie avec h,
V et 7 comme variables d'état :
h V sin 7 X = V - f( x ,u ) = - ^ - 5 sin7 7 Lu _ m V + ( j ~ $ ) cos^ (2.49)
Le critère de performance choisi afin d'optim iser le contrôleur est l'im pulsion A V requise afin de circulariser à la bonne altitude l'orbite du véhicule en sortie de l'atm osphère. Ce critère de performance est donc seulement fonction des variables d'état en sortie de l'at m osphère, au tem ps tf :
AV = <p(x (tf ) ) . (2.50)
La conception du contrôleur consiste à calculer u n vecteur de coefficients d'influence À = [Xh,Xv , A7]t . Ces variables adjointes m odulent l'im portance accordée à chaque para mètre en fonction d u tem ps afin de minimiser AV . Pour simplifier le calcul des variables adjointes, elles sont définies telles que :
ÀT
H tf)
dx (2.51)
(2.52)
Avec ce vecteur, la relation entre une variation ÔAV du critère de performance et une déviation Sx des variables d 'état et une déviation ôu de la comm ande par rapport à la trajectoire de référence peut être établie :
/
tf d f
Le système d'équations à résoudre afin d'obtenir les valeurs des variables adjointes en fonction d u tem ps devient :
Ày 0 — sin 7* D* m hs 2 D* L*u* y* cos 7* + ' mhsV r *
L*u* cos 7* g cos 7*
mV* —V* cos 7* g cos 7* mV* V* 0 0 V* sin 7* g sin 7* L* mV* Xh \ v A*y 'A;/ (2.54)
où l'indice « * » indique les conditions de référence. À partir des conditions aux frontières de l'équation 2.52 et du système de l'équation 2.54, il est possible d'obtenir p ar intégration (inverse) les valeurs de Àh{t), Xv (t), À7(t) et Xu(t). Ces valeurs sont requises par la loi de com m ande de l'algorithme.
2.5.2 Loi de commande
L'équation 2.53 perm et de conclure que pour conserver SAV nul, la variation de com m ande Su à appliquer doit être :
A h(t)ôh(t) + A v(t)ôv(t) + X7(t)S7(t)
A; (2.55)
Il est cependant pertinent de remplacer h et 7 par des valeurs plus faciles à m esurer en
vol, soit la décélération d due à la traînée et la variation d'altitude h : A d(t)Sd(t) + A v (t)ôv(t) + Su = Sd = Su A„ mhs Xh D* A iy (2.56) (2.57) (2.58) h V* cos 7*
Finalement, la loi de comm ande peut être définie en utilisant l'énergie m assique s plutôt que le tem ps t comme variable indépendante.
KXd(e) ( D { e ) D*(e)'
COS (ficm d — COS (!)
K X v (e)
Xu (s) m m
2.6. COM PARAISON DES ALGORITHMES 25
L'énergie m assique est en effet plus représentative de la situation d u véhicule dans sa tra jectoire puisque deux trajectoires ayant des échelles de tem ps différentes peuvent arriver aux mêmes conditions en sortie. Le facteur K est u n facteur de « surcontrôle » ajouté afin de compenser pour des conditions qui seraient loin de la position de référence ou p our des incertitudes rencontrées. Ce facteur demeure dans ce cas le seul param ètre à ajuster afin d'optim iser le compromis précision/robustesse d u contrôleur.
La correction de l'inclinaison de l'orbite p our le contrôleur de conditions term inales est ici aussi considérée découplée de la dynam ique longitudinale, comme dans le cas des prédicteurs-correcteurs analytiques. Les corrections s'effectuent en inversant le signe de l'angle d'inclinaison d u véhicule de commande (voir section 2.1.3).
2.6 Comparaison des algorithmes
On retrouve dans [Rousseau et coll., 2002] une comparaison exhaustive d u prédicteur- correcteur analytique, du contrôleur d'énergie, du prédicteur-correcteur num érique et du contrôleur de conditions terminales dans le contexte de différents scénarios de m ission d'exploration martienne. Le contrôleur mixte n 'a pas été comparé dans le cadre de cette étude, puisqu'il a été mis au point pour u n scénario de mission différent. Les caractéris tiques suivantes des algorithmes ont été évaluées :
- robustesse, - précision,
- charges therm iques et mécaniques sur le véhicule, - complexité.
Les résultats de cette étude sont présentés au tableau 2.1. Les conclusions de l'étude sont que le prédicteur-correcteur num érique n'est pas u n candidat de choix. La charge de cal cul trop im portante limite le nombre d'itérations qu'il est possible de réaliser pendant la trajectoire. Une amélioration de l'algorithm e nécessiterait une hausse d u niveau de com plexité, sans toutefois garantir de meilleures performances. Pour les trois autres, de façon générale, le contrôleur de conditions terminales est le plus robuste alors que le
prédicteur-correcteur analytique et le contrôleur d'énergie seraient plus précis.
TABLEAU 2.1 - Com paraison d u prédicteur-correcteur analytique, d u contrôleur d'éner gie, d u prédicteur-correcteur num érique et d u contrôleur de conditions terminales.
A lgorithm e Robustesse Précision Charges Complexité
APC Moyen Bon Bon Moyen
EC Moyen Bon Moyen Moyen
NPC Mauvais Mauvais Mauvais Mauvais
TPC Bon Moyen Moyen Bon
Les algorithmes analytiques (le prédicteur-correcteur analytique et le contrôleur d'éner gie) présentent u n excellent potentiel en exigeant moins de calcul. Par le fait même, ils offrent une plus grande précision puisque leur tem ps d'itération est beaucoup plus court. Il serait donc pertinent de rendre ces algorithmes plus robustes.
2.7
M odélisation de l'aérocapture
Comme ces algorithmes et les améliorations apportées devront être validées en sim ula tion, une recherche des différents outils disponibles pour simuler une m anoeuvre d'aéro- capture est requise. Trois aspects sont plus particulièrement requis, soit la dynam ique de vol d u véhicule, u n modèle de Mars et de son atmosphère et finalement une représenta tion des actionneurs et des capteurs d u véhicule.
2.7.1 Modélisation de la dynamique
Plusieurs ouvrages, dont [de Lafontaine, 2004], présentent la dynam ique orbitale en 3 di m ensions d 'u n e masse ponctuelle avec perturbations. La dynam ique orbitale d u véhicule en trois dimensions peut être décrite p ar six états :
- r : distance entre le véhicule et le centre de la planète (m), - Vr : vitesse radiale d u véhicule (m /s),
2.7. M ODÉLISATION DE L'AÉROCAPTURE 27
- un : vitesse angulaire orbitale du véhicule (s-1), - i : inclinaison de l'orbite (rad),
- ü : ascension droite d u noeud ascendant (rad), - u : argum ent de latitude (rad).
Dans u n repère orbital, tel que défini dans [de Lafontaine, 2004], la dynam ique orbitale d u véhicule est donnée par :
II •s- (2.60) Vr = r u l + g + fr (2.61) —2uinVr f t Un = + r r (2.62) (*) = cos u fn ru n (2.63) ù = 1 sin" / „ ru n siiiï (2.64) ù = ujn — Ù cos i. (2.65)
où les termes f r, f t et f n représentent les forces de perturbations. Ces term es pourront servir à m odéliser l'effet des forces aérodynam iques sur le véhicule.
Dans [Ro et Queen, 1998], on retrouve les équations définissant les conditions d'orbite d u véhicule, une fois l'aérocapture terminée. À la sortie de l'atm osphère, il est possible d'estim er le rayon à l'apoapside de l'orbite en supposant une orbite képlérienne (sans perturbations orbitales) à partir de ce point, tel que présenté dans [Ro et Queen, 1998]. Le rayon à l'apoapside ra/ l'énergie m assique e et la quantité de m ouvem ent angulaire H
caractéristiques de l'orbite résultant de l'aérocapture sont calculés à partir de la vitesse inertielle totale V et de la composante tangentielle de la vitesse Vt à la sortie :
H 2
Va = (2.66)
/x - y V2 + 2sH 2
H = rVt (2.67)
![Figure 2.7 - Structure de la loi de guidage pour le contrôleur mixte. Tiré de [Jits, 2000].](https://thumb-eu.123doks.com/thumbv2/123doknet/2793220.65814/37.915.256.717.386.692/figure-structure-loi-guidage-contrôleur-mixte-tiré-jits.webp)