Exploration de la scalabilité de LocFaults
Texte intégral
Figure
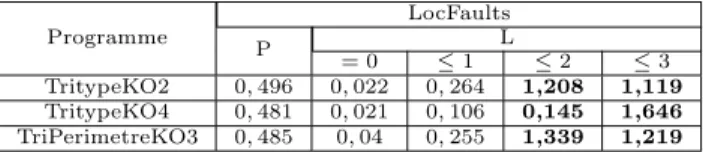
![Figure 7 – Le programme Minimum et son CFG nor- nor-mal (non d´epli´e). La postcondition est {∀ int k; (k ≥ 0 ∧ k < tab.length); tab[k] ≥ min}](https://thumb-eu.123doks.com/thumbv2/123doknet/7785560.259231/5.892.436.807.215.479/figure-programme-minimum-cfg-nor-epli-postcondition-length.webp)


Documents relatifs
La d´efinition des clauses unitaires peut ˆetre ´eten- due au cas des contraintes pseudo-bool´eennes. N´ean- moins, le terme unitaire est employ´e en r´ef´erence `a la
des algorithmes de reherhe loale dans e adre ave.. trois valeurs
Pour ceci, on ´ ecrira une fonction qui donnera une valeur approch´ ee de la plus grande valeur propre, une valeur approch´ ee d’un vecteur propre associ´ e et le nombre
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
APX or DAPX: the class of problems for which there exists a polynomial algorithm achieving standard or differential approximation ratio f ( | x | ) where function f is constant (it
Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale.. Toute copie ou impression de ce fichier doit contenir la présente mention
[r]
Celle-ci nous montre que compara- tivement `a la figure 8, le fait d’avoir consid´er´e une excitation moyenne fr´equence conduit `a ce que le terme η h coup occupe cette fois-ci
