Using spherical moments for visual servoing from a special target with unique projection center cameras
Texte intégral
Figure
Documents relatifs
[19] de Flores R, La Joie R, Landeau B, Perrotin A, M´ezenge F, de La Sayette V, Eustache F, Desgranges B, Ch´etelat G (2015) Effects of age and Alzheimer’s disease on
In this paper we show how to modify a large class of evolution strategies (ES’s) for unconstrained optimization to rigorously achieve a form of global convergence, meaning
insects form a “modality-independent internal representations of object shapes”, an
- Automatic Mesh-point Clustering Near a Boundary in Grid Generation with Elliptic Partial Differential Equations, J. and
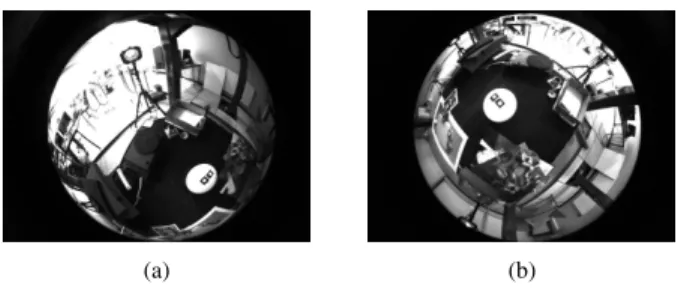
We demonstrate with a real experiment the accuracy of the visual odometry obtained using the spherical image processing and the improvement with respect to the use of a
2014 Dans la méthode de projection par des rotations finies, on doit calculer des fonctions des angles pour les normalisations et pour tout opérateur étudié.. Leur
En transportant l’action de G sur Q au moyen des projections st´er´eographiques de pˆole N ou de pˆole S sur le plan E on obtient, dans le cas o`u ζ = 1, une action hamiltonienne
The second option uses affine invariants and requires extracting and tracking two points, but ensure higher performances since it allows convergence for huge motion (exceptional for
