HAL Id: hal-01718817
https://hal.archives-ouvertes.fr/hal-01718817
Submitted on 27 Feb 2018HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Proposition d’un modèle de connaissance à base d’agents
pour l’étude des rapports entre l’activité physique et
l’obésité infantile
Aziza Rabia, Zgaya Hayfa, Guinhouya Benjamin, Borgi Amel
To cite this version:
Aziza Rabia, Zgaya Hayfa, Guinhouya Benjamin, Borgi Amel. Proposition d’un modèle de con-naissance à base d’agents pour l’étude des rapports entre l’activité physique et l’obésité infantile. GISEH2012, 2012, Québec, Canada. �hal-01718817�
1
Proposition d’un modèle de connaissance à base d’agents pour l’étude des
rapports entre l’activité physique et l’obésité infantile
Aziza Rabia 1, Zgaya Hayfa 2, Guinhouya Benjamin 2, Borgi Amel 1,3
1 Laboratoire LIPAH - Faculté des Sciences de Tunis, Université de Tunis El-Manar - El-Manar 2092 Tunisie, e-mails : [email protected] – [email protected]
2 Laboratoire de Santé Publique - EA 2694 – Faculté d’Ingénierie et de Management de la Santé (ILIS), 42, rue Ambroise Paré 59120 – LOOS, e-mails : [email protected] – [email protected] 3 INSAT – Université de Carthage, Centre Urbain Nord BP 676 - 1080 Tunis Cedex
Résumé. Ce travail s’inscrit dans le cadre d’une recherche multidisciplinaire au croisement de l’épidémiologie et de l’informatique. Dans la première discipline, nous nous intéressons à l’effet de l’activité physique sur l’obésité infantile, qui représente un véritable problème mondial de santé publique. Avec l'augmentation constante de leur prédominance dans la population infantile, il semble aujourd'hui nécessaire de stimuler l'engagement des enfants dans une activité physique régulière. Par conséquent, de nombreux travaux ont tenté de comprendre les déterminants et les facteurs clés principaux de l'activité physique habituelle des enfants en surpoids/obésité. Nous pensons qu’une approche de simulation de la réalité permettrait une étude approfondie de l’évolution des comportements des enfants selon des facteurs dynamiques et interactifs de nature diverse. La deuxième discipline, qu’est l’informatique, nous permet de proposer un tel modèle de simulation, et ce grâce à l'approche multi-agent. Les systèmes multi-agents (SMA) s'appuient sur les caractéristiques observées du monde réel, et permettent une conception efficace, dynamique et flexible d'un environnement où des entités autonomes et rationnelles peuvent cohabiter, communiquer et évoluer.
Dans cet article, nous proposons une conception d’un SMA pour caractériser le comportement d’activité physique des enfants et l’environnement dans lequel ce comportement se déroule. Cette proposition servira de base pour simuler et tester des scénarii dans le but d’étudier l’impact de différents programmes d’activité physique sur le devenir pondéral des enfants.
Mots clés : obésité infantile, comportement, activité physique habituelle, système multi-agent, simulation.
1. Introduction
L’activité physique apparaît aujourd’hui comme un facteur essentiel dans la prévention et la lutte contre l'obésité pédiatrique [Patrick, 2007]. Nous nous penchons plus particulièrement sur l’effet de l’activité physique habituelle (Habitual Physical Activity : HPA) sur ce phénomène. L’objectif principal de nos travaux consiste à modéliser un système de simulation du comportement de l’enfant. Un tel système nous aidera à comprendre et analyser les facteurs contribuant à l’obésité infantile, en se concentrant sur l’HPA.
Notre choix s’est porté sur les systèmes multi-agents (SMA) qui permettent de fournir un modèle adapté pour simuler la réalité. Nous pouvons citer à titre d’exemple, les travaux de [Nguyen, 2005] qui a conçu et réalisé un simulateur multi-agent pour aider à l’étude et l’amélioration des nouvelles procédures de collaboration entre acteurs de la gestion du trafic aérien. Dans le domaine médical, citons l’exemple du SMA proposé par [Wang et
2 médecine.Nous nous proposons donc de concevoir un SMA qui simule l’enfant scolarisé au sein de son environnement.
La section suivante présente les SMA et les possibilités de raffinement de nos recherches qui accompagnent l’adoption de cette modélisation. Ensuite, nous parlons de l’importance de l’HPA dans la prévention du surpoids ou de l’obésité infantile. Enfin, avant de conclure, nous exposons l'architecture multi-agent de notre système ainsi que les comportements de chaque agent et les divers types d'interaction dans l'environnement global.
2. SMA
En informatique, les SMA sont à l’intersection de plusieurs domaines : l’intelligence artificielle, le génie logiciel, les systèmes distribués, etc. Leurs applications continuent à se multiplier dans différents secteurs. Récemment, cette technologie a reçu une attention croissante des communautés scientifiques de mathématique, physique, ingénierie et études sociales [Anderson et al., 2006, Liu et al., 2009, Liu et al., 2010].
Un SMA est un ensemble d'entités autonomes et interactives, appelées agents, qui évoluent au sein d'un environnement qu'ils perçoivent (partiellement ou totalement) et sur lequel ils agissent [Ferber, 1999]. Ces agents peuvent être dotés de comportements rationnels intelligents leur permettant de raisonner dans le but de cohabiter ou de résoudre un problème spécifique. Ce comportement est défini par les informations que l’agent possède, le(s) but(s) qu’il poursuit, et les moyens mis à sa disposition [Herbert, 1947]. Une caractéristique fondamentale d’un SMA est sa capacité à prendre des décisions et gérer les conséquences de ces décisions dans un environnement complexe et dynamique [Visser et al., 2011]. Cette modélisation permet de simuler un monde réel flexible et dynamique, un monde qui change au delà du contrôle des agents qui y sont actifs [Helleboogh et al., 2006]. Les SMA classiques peuvent être enrichis par différentes approches qui permettraient d’améliorer le modèle de simulation que nous proposons dans cet article. Ainsi les agents peuvent être dotés de croyances, désirs et intentions, ce sont les agents BDI (Belief-Desire-Intention). Nous les présentons en premier. Le deuxième point concerne l’intégration de l’apprentissage artificiel dans un SMA, et le troisième celui de la prise en compte de l’imprécision et de l’incertitude grâce à la logique floue.
2.1. Agent BDI
Une bonne partie des applications SMA ont pour objectif de simuler l’être humain. De nombreux facteurs cognitifs déterminent le comportement d’une personne, de ce fait, les approches classiques des SMA s’avèrent insuffisantes pour une telle simulation. L’une des approches les plus connues qui permettent d’enrichir les « agents » classique est le modèle BDI (Belief-Desire-Intention). Cette approche construit l’agent (qui représente la personne) autour d’un cœur composé de trois ensembles essentiels. Le premier est l’ensemble des perceptions de l’agent (de son environnement) : c’est l’ensemble de croyances (Beliefs). Ces perceptions ne sont pas forcément correctes ou complètes et peuvent changer au cours du temps. De plus, comme tout individu, un agent peut avoir des motivations, ils sont groupés dans le deuxième ensemble, celui des désirs (Desires). Ils représentent aussi les différents buts que l’agent pourrait vouloir atteindre. [Russell et al., 2003]. L’agent peut avoir une panoplie de désirs, sauf qu’à un moment donné, il choisit d’en réaliser un. Ce choix transforme ce désir en Intention, et déclenche l’exécution d’un plan d’actions.
Le modèle de simulation d’enfants scolarisés dans leur environnement, que nous présentons dans cet article, repose sur des approches SMA classiques. Nous envisageons par la suite d’enrichir les agents (représentant des personnes) du système en les transformant en agents BDI.
3 2.2. SMA et apprentissage artificiel incrémental
Notre conception de base sera aussi complétée et enrichie par l’intégration de méthodes d’apprentissage artificiel incrémental (Incremental Learning). Le concept de base étant qu’un agent peut se rappeler des plans qu’il a déjà adoptés et du résultat d’exécution (réussite ou échec). Il a donc sa propre bibliothèque de contextes d’application des plans à partir desquels il pourrait appliquer des techniques d’apprentissage. L’objectif est d’en tirer des règles qui lui serviront dans le choix d’adoption de tel ou tel plan [Cornuéjols et al., 2003, Guerra et al., 2007, Witten et al., 2011]. De plus, une approche d’apprentissage collaboratif est possible. Cette dernière permet de gagner en précision et en justesse dans le choix des plans à exécuter et de la prise de décision.
2.3. SMA et logique floue
Pour vivre dans son environnement, un agent utilise plusieurs processus tels que le processus de raisonnement, de communication, d’apprentissage etc. Tous ces processus, en plus de l’environnement lui-même, peuvent avoir un aspect dynamique incertain et imprécis. Ces aspects sont particulièrement importants dans la simulation de personnes (qui sont dans notre cas des enfants ou parents). Une modélisation SMA efficace, pouvant simuler le réel, doit ainsi passer par une prise en compte de l’imprécis et de l’incertain. La logique floue qui permet de représenter et de traiter des connaissances imparfaites apporte des réponses à cette question. Cette approche se base sur la théorie des sous ensembles flous qui est une théorie mathématique dont l'objectif principal est la modélisation des notions vagues et incertaines de l’environnement naturel [Zadeh, 1965, Bouchon-Meunier, 1995]. Dans notre étude, il serait intéressant d’intégrer la logique floue à notre SMA pour la modélisation des incertitudes de l’environnement, et celle des processus de nos agents ; par exemple, pour la modélisation des croyances des agents.
3. Activité physique et obésité infantile
L'engagement dans une activité physique régulière apparaît comme un facteur important pour la prévention du surpoids/obésité [Steinbeck, 2001]. Avec l'augmentation constante de sa prévalence dans la population infantile, il semble aujourd'hui nécessaire de stimuler l'engagement des enfants dans une activité physique régulière. Ainsi, l'étude des facteurs qui influencent le HPA est très importante. Par conséquent, de nombreux travaux ont tenté de comprendre les déterminants et les facteurs clé principaux du HPA en vue de les analyser correctement, en particulier pour les enfants en surpoids et obèses.
A cette fin, des études de terrain, des enquêtes et études statistiques sont spécialement menées et exploitées [Hawkins et Law, 2006, Guinhouya et al., 2010, Guinhouya, 2012]. Ces études se basent essentiellement sur la collecte de données en population. Toutefois, il faut reconnaître aux enquêtes épidémiologiques certaines limites en termes d’échantillonnage (représentativité), de lourdeur de mise en place (difficultés à constituer et à suivre les cohortes pour l’examen de la séquence temporelle exposition-événement) et de coût. Pour les maladies chroniques non communicables comme l’obésité, il faut également tenir compte d’une contrainte supplémentaire, celle du temps de latence entre l’exposition (inactivité physique) et le développement de la surcharge pondérale.
Dans ce contexte, la technologie SMA semble être adaptée pour représenter virtuellement ce cadre de vie de l’enfant ainsi que les caractéristiques de son comportement d’activité physique susceptibles d’induire une prise de poids. Dans cette perspective, il deviendrait possible de générer et de tester différents scénarii devant permettre d’une part de mieux étudier le rôle causal de l’inactivité physique dans l’obésité infantile, et d’autre part, de proposer et d’anticiper les effets de programmes d’activité physique alternatifs, avant leur mise en
4 œuvre réelle possible. L’utilisation des SMA peut donc constituer un nouvel outil d’aide à la décision des politiques publiques de santé. Malgré cela, cette technologie a très peu été utilisée en épidémiologie. Parmi les travaux émergents, nous pouvons citer l’étude de [Auchincloss et al, 2011] dans laquelle un système à base d’agents a été implémenté afin d’étudier le rôle des facteurs économiques dans une alimentation saine. Citons aussi les travaux de [Roche et al., 2011] qui ont modélisé un SMA pour simuler l'évolution d’agents pathogènes, et ont pris comme exemple les virus grippaux.
Toutefois, à notre connaissance l’approche SMA n’a jamais été utilisée dans des relations complexes entre l’activité physique et l’obésité infantile. L’approche par les SMA nous permettra d’envisager une analyse approfondie du comportement des enfants dans différents cadres de vie en tenant compte des différents facteurs dynamiques et interactifs qui influencent l’activité physique.
Dans ce contexte, et en s'appuyant sur les caractéristiques observées du monde réel, l'approche multi-agent permet une conception efficace, dynamique et flexible d'un tel environnement où des entités autonomes et rationnelles (représentant les enfants et leurs parents dans leur entourage) peuvent cohabiter, communiquer et évoluer.
4. Le modèle proposé
Dans leur environnement, les agents interagissent selon les rôles qui leur sont attribués dans le système et en accord avec un ensemble de règles définissant le type d'organisation [Mandiau et al., 1999]. Les rôles d'un agent dans une organisation caractérisent son comportement sachant qu'un agent peut avoir plusieurs comportements. Dans cet article, nous proposons les éléments de base de notre SMA à savoir : les agents du système, leurs caractéristiques et leurs relations, l’environnement dans lequel ils évoluent, ainsi qu’une vue sur les comportements et les interactions possibles entre agents.
4.1. Agents
En se basant sur un environnement ouvert et dynamique, le système multi-agent que nous proposons est composé de N agents. Soit A = {A1, ..., An} l'ensemble de tous les agents du système à l’instant (t). Dans notre système, un agent représente une personne, appelée Person-Agent : un enfant s'il a moins de 18 ans et un adulte sinon. Nous adoptons la notation UML [Roques, 2007] pour représenter l'aspect statique des SMA dans un diagramme de classes représenté par la Figure 1. Cette dernière présente deux aspects : les caractéristiques des agents et celles de leurs relations. Ces deux aspects
sont expliqués dans ce qui suit. Figure 1. Le diagramme de classe des Person-Agent Caractéristiques. Une caractéristique est représentée par un champ (ou attribut) dans une classe. Une personne (enfant ou adulte) se caractérise par six attributs principaux :
Id : l'identifiant unique de la personne dans le système ;
HPA – Habitual Physical Activity : l'activité physique habituelle qui caractérise l'activité physique réalisée
par la personne. Il s'agit de la variable cible de notre étude. Elle sera évaluée selon, non seulement toutes les autres caractéristiques, mais aussi tous les comportements et interactions possibles de l’agent considéré dans son environnement ;
5
PF – Psychological Factors : facteurs psychologiques, y compris de nombreux paramètres tels que la
sécurité perçue, le plaisir ou le stade trans-théorique (trans-theoretical stage). Il serait probablement intéressant d’intégrer ces facteurs dans le cœur BDI de l’agent ;
BPF – Biological and Physiological Factors : facteurs biologiques et physiologiques, y compris de
nombreux paramètres comme l'âge, le sexe ou la maturité ;
PFF – Physical Fitness Factors : facteurs de conditionnement physique, y compris de nombreux
paramètres tels que l'aptitude aérobie ou la force musculaire ;
SS – Social Status : la condition sociale qui correspond à la classe défavorisée, moyenne ou favorisée.
Nous ne détaillerons pas les paramètres des caractéristiques dans le présent article, mais ils font partie des travaux en cours. Ceci est un aspect nécessaire à notre étude, car, toutes les caractéristiques influencent le HPA, et s’influencent mutuellement, vu qu'elles sont liées.
Sachant qu'une caractéristique peut dépendre de plusieurs paramètres, l'accès au paramètre (α) à partir d'une caractéristique (X) est comme suit : (X.α). Une septième caractéristique qui ne caractérise que l'adulte doit être prise en compte : PS – Professional Status : le statut professionnel. Pour distinguer entre un adulte et un enfant en tenant compte des caractéristiques communes, nous avons adopté le concept d'héritage orienté-objet "est un" représenté par l'opérateur de spécialisation, noté par une flèche (Figure 1) : l'adulte est une personne qui a un PS avec (BPF.age >= 18) et un enfant est une personne qui a (BPF.age < 18) et sans PS.
Relations. Dans notre système, nous avons identifié deux types de relations. La relation «friend of» ou « ami de » qui est une relation réflexive : une personne (enfant ou adulte) peut être ami avec une autre personne; et la relation binaire «child of» ou « fils de » entre un enfant et un adulte.
4.2. Environnement
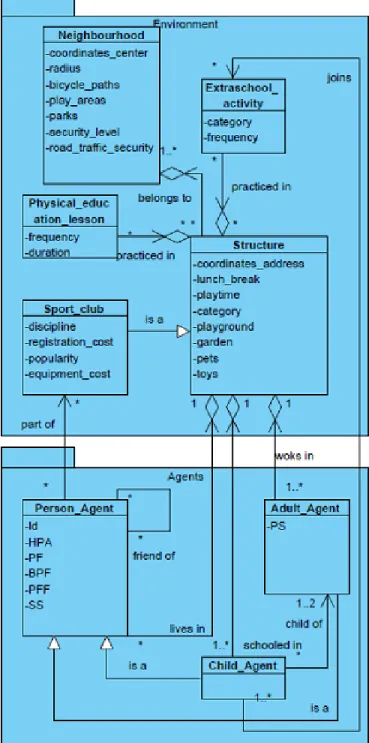
Une personne vit dans un environnement de politiques sociales et de législation nationale. Ceci est l’environnement global qui influence les facteurs prédisposant du HPA [Hawkins et Law, 2006]. Ce cadre intègre la communauté et les caractéristiques sociales qui à leur tour, comprennent la communauté et les caractéristiques sociales de la famille et la maison. A partir de ces observations du monde réel et si nous supposons que nous nous concentrons sur les enquêtes HPA, nous remarquons que l'environnement des enfants est composé de : sa famille, ses amis, les parents de ses amis, les amis de ses parents, ses enseignants (et tous ceux qui travaillent dans son école), son quartier et son club de sport dans le cas échéant. L'environnement humain (parents, parents d'amis, enseignants, etc.) est composé de deux types de Person-Agent pouvant être liés : enfants (Child_Person-Agent) et adultes (Adult-Person-Agent) (§ 4.1). Il reste maintenant à examiner, ce que nous appelons, l'environnement structurel. Ce dernier est composé de : la maison, l'école, le centre de loisir, le club de sport et le quartier (Figure 2).
Quartier (Neighbourhood). Nous représentons un quartier par les caractéristiques suivantes : center : les coordonnées géographiques du centre (latitude, longitude), length of the bicycle path : la longueur de la piste cyclable, exprimée en kilomètres, surface of play areas : la surface des espaces de jeux, exprimée en kilomètres carrés, surface of parks : la surface des parcs, exprimée en kilomètres carrés, security level : le niveau de sécurité du quartier, road traffic security : le niveau de sécurité routière.
Un quartier est composé de nombreux types de structures : maisons, écoles, clubs sportifs, etc. sachant qu'une structure peut appartenir à plusieurs quartiers et que les quartiers peuvent se chevaucher.
Structure. Comme mentionné ci-dessus, une structure représente un bâtiment qui regroupe un ensemble de personnes comme une maison, une école ou un club de sport. Afin de prendre en compte leurs caractéristiques communes, nous avons conçu la classe Structure, qui comprend toutes les fonctions possibles d'une structure :
6
coordinates adress : les coordonnées géographiques de la structure, lunch break : la pause déjeuner,
exprimée en minutes, playtime : le temps de jeu, exprimé en minutes, category : la catégorie de la structure (école, maison, appartement, club de sport), playground : terrain de jeux exprimé en kilomètres carrés, garden : jardin exprimé en kilomètres carrés, pets : le nombre d'animaux de compagnie de la structure, toys : le nombre de types de jouets dans la structure.
Parfois, les parents choisissent de solariser leurs enfants à la maison. C'est pourquoi, en particulier pour ce cas, nous n'avons pas utilisé le concept d'héritage pour distinguer entre une maison et une classe d'école par la spécialisation. Mais à chaque fois que nous voulons ajouter une école, une maison, ou une maison-école à l’environnement, le système instancie simplement une instance de la nouvelle structure à partir de la classe correspondante.
Toutefois, nous avons spécifié une classe Sport_club (Figure 2), car il possède des caractéristiques particulières par rapport à une maison ou une école :
Discipline : la discipline sportive, Registration cost : le coût d'inscription, Popularity : la popularité
de la discipline, exprimée par un pourcentage,
equipment cost : le coût de l'équipement
nécessaire pour pratiquer la discipline.
Un club de sport est une structure par spécialisation.
Composition possible d’une structure : Une structure peut être composée de leçons d'éducation physique et/ou d’activités extrascolaires (surtout quand il s'agit d'une école). Ceci est exprimé par le concept d’agrégation orientée-objet représenté par un losange, comme illustré dans la Figure 2 :
physical education lessons : leçons d'éducation
physique, caractérisées par : frequency : le nombre de leçons par semaine, et duration : durée;
extra-school activities : activités extrascolaires
caractérisées par : category : la catégorie de l'activité et frequency : le nombre de leçons par année.
Par défaut, un enfant ne participe pas à une activité extrascolaire, nous ajoutons donc un lien entre les classes Child et Extra_school_activity (Figure 2). La Figure 2 représente le diagramme de classe global SMA, mais il ne représente que l'aspect statique du système. L'aspect dynamique d'un SMA nécessite des approches avancées avec plusieurs étapes techniques. La première étape consiste à préciser le rôle de chaque agent du système pour identifier ses comportements possibles. Nous la décrivons dans la section qui suit.
7 4.3. Aspect dynamique du SMA : comportements et interactions
Dans cette section, nous définissons les différents rôles possibles d'un agent selon qu’il s’agisse d'un adulte ou d’un enfant (tableau I) sachant que pour un rôle, un agent peut avoir plusieurs comportements. Par exemple, un enfant a le rôle d'un ami par rapport à un autre enfant. Son comportement peut changer si l’autre enfant est (d'une manière non exclusive) : un voisin, un camarade de classe, un frère / sœur, le fils / la fille des amis des parents, etc. Tous ces comportements sont à développer sous forme de plusieurs types de protocoles
d'interactions SMA Table I. Les rôles des agents par rapport (%) aux autres agents du système
4.4. Initialisation du modèle SMA
Dans la plupart des SMA, les agents ont un ou plusieurs comportements bien définis dès le démarrage du système. Ce comportement peut bien sûr s’adapter à l’environnement au cours du temps, mais c’est à la personne qui développe/configure le système de définir le point de départ. Nous envisageons d’alimenter le comportement de nos agents avec des règles extraites à partir de bases de données (qui sont déjà en place) provenant de diverses enquêtes et études de terrains. Ces règles seront extraites en appliquant des techniques d’apprentissage [Cornuéjols et Miclet, 2003, Witten et al., 2011].
La question de l’initialisation des agents se pose également pour les aspects descriptifs (statiques). Par exemple, à chaque fois que le système crée un agent représentant une personne, il attribue une valeur par défaut pour chaque paramètre défini. Cette valeur peut être générée à partir d'un algorithme de comportement intégré qui prend en compte les interactions possibles entre toutes les caractéristiques définies. Cette partie du système sera également développée dans les travaux futurs. Dans cet article nous nous sommes concentrés sur l'aspect conceptuel du niveau macroscoscopique du système.
5. Conclusion et travaux futurs
Dans cet article nous avons présenté une proposition d’un système multi-agent (SMA) pouvant simuler l'environnement des enfants afin d'estimer leur activité physique habituelle (HPA). L'architecture proposée prend en compte toutes les caractéristiques de l'enfant, son comportement, le comportement de ceux qui l'entourent et l'aspect structurel de l'environnement qui a lui aussi un impact important. Cette étude sera ultérieurement améliorée en enrichissant le modèle SMA proposé par des notions et des approches issues de l’intelligence artificielle. Nous envisageons en particulier de développer le niveau microscopique du système et notamment de :
- Utiliser des techniques d’apprentissage et de traitement de données pour extraire les règles régissant le comportement de nos agents à partir des données provenant d’études épidémiologiques ;
- Rapprocher le comportement des agents de la réalité en intégrant le modèle BDI ;
- Employer la représentation et le traitement flous afin d’exprimer l’incertitude des perceptions de l’agent (vis-à-vis de lui même, des autres agents, ou de son environnement). L’intégration des techniques floues dans le processus de raisonnement et de prise de décision de l’agent serait également intéressante ;
- Renforcer l’autonomie de nos agents et la justesse de leurs décisions en leur permettant d’apprendre de leurs anciennes expériences, de partager leurs connaissances, et de collaborer afin de cohabiter et/ou de résoudre leurs problèmes (apprentissage incrémental).
8
6. Références
Anderson, B. D. O., C. YU, B. Fidan et J. M. Hendrickx (2006). Control and information architectures for formations. IEEE conference on Control Applications, 1127-1138,
Auchincloss, A. H., R. L. Riolo, D. G. Brown, J. Cook et A. V. Diez Roux (2011). An agent-Based Model of Income Inequalities in Diet in the Cntext of Residential Segregation. American Journal of Preventive Medecine, 40(3), 303-311.
Bouchon-Meunier, B. (1995). La logique floue et ses applications. Ed. Addisson-Wesley. Cornuéjols, T. et L. Miclet (2003). Apprentissage artificiel, concepts et algorithmes. Ed. Eyrolles.
Ferber, J. (1999). Multi-Agent System: An Introduction to Distributed Artificial Intelligence. Addison Wesley, London.
Guerra, H. A., H. G. Ortiz et R. W. A. Luna (2007). Jason smiles: Incremental BDI MAS Learning. Mexican
International Conference on Artificial Intelligence - Special Session, 6, 61-70.
Guinhouya, B. C., G. K. Apété et H. Hubert (2010). News about the determinants of the habitual physical activity (HPA) of children: Update and implications for care and prevention options in pediatrics overweight/obesity. Revue d’Epidémiologie et de Santé Publique, 58, 49-58.
Guinhouya, B. C (2012). Implication of physical activity correlates to the prevention of childhood obesity.
Paediatric and Perinatal Epidemiology (sous presse)
Hawkins, S. S. et C. Law (2006). A review of risk factors overweight in preschool children: A policy perspective. International Journal of Pediatric Obesity, 1, 195-209.
Helleboogh, A., G. Vizzari, A. Uhrmacher et F. Michel (2006). Modeling dynamic environments in multi-agent Simulation. Autonomous Agents and Multi-Agent Systems, 14(1), 87-116.
Herbert, S (1947). Administrative Behavior. New York, NY : Macmillan.
Liu, X., T. Chen et W. Lu (2009). Consenssus problem in directed networks of multi-agents via nonlinear protocols. Physics Letters A, 373, 3122-3127.
Liu, H., G. Xie et L. Wang (2010). Necessary and sufficient conditions for solving consensus problems for double-integrators dynamics via sampled control. International Journal of Robust and Nonlinear Control, 20, 1706-1722.
Mandiau, R., E. G. L. Strugeon et G. Agimont (1999). Study of the influence of organizational structure of the efficiency of a multi-agent system. Networking and Information Systems Journal, 2, 153-179.
Nguyen, D. M. (2005). Vers la conception participative de simulations sociales : Application à la gestion du trafic aérien. Rapport de thèse. Université de Paris 6.
Patrick, L., (2007). Activités physiques et santé. Editions Ellipses, Paris.
Roche, B., J. M. Drake et P. Rohani (2011). An agent-based model to study the epidemiogical and evolutionary dynamics of Influenza viruses. BMC Bioformatics, 12, 87.
Roques, P. (2007). UML 2 - Modéliser une application Web. Eyrolles.
Russell, J. Stuart et P. Norvig (2003). Artificial Intelligence: A Modern Approach. Prentice Hall, 3ème edition. Steinbeck, K. S. (2001). The importance of physical activity in the prevention of overweight and obesity in childhood: a review and an opinion. Obesity Reviews, 2, 117-130.
Visser, S., J. Thangarajah et J. Harland (2011). Reasoning About Preferences in BDI Agent Systems. The 10th
International Conference on Autonomous Agents and Multiagent Systems, 3. 1139-1140.
Wang, K. L., N. E. Reed et D. S. Vincent (2010). A Multi-Agent Simulation of Kidney Function or Medical Education. Multi-Agent Systems for Healthcare Simulation and Modeling: Applications for System Improvement. IGI Global. 178-194.
Witten, I.H., E. Frank et A. Hall (2011). Data mining: Practical machine learning tools and techniques. Morgan Kaufmann, 3ème édition.