HAL Id: hal-02971446
https://hal.archives-ouvertes.fr/hal-02971446
Submitted on 19 Oct 2020HAL is a multi-disciplinary open access
archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Recherche architecturale : les influences de la robotique
de construction sur les formes architecturales
Jean-Marc Carlier, Olivier Piot, Vincent Brossy
To cite this version:
Jean-Marc Carlier, Olivier Piot, Vincent Brossy. Recherche architecturale : les influences de la robotique de construction sur les formes architecturales. [Rapport de recherche] 0745/91, Ecole d’architecture de Paris-Tolbiac; Ministère de l’équipement, du logement, des transports et de la mer / Bureau de la recherche architecturale (BRA). 1990. �hal-02971446�
Jean-Marc Carlier Olivier Piot Responsable scientifique: Vincent Brossy
RECHERCHE ARCHITECTURALE:
LES INFLUENCES
DE LA ROBOTIQUE DE CONSTRUCTION SUR LES FORMES ARCHITECTURALES
SOMMAIRE: 1. INTRODUCTION 2. LE ROBOT DE CONSTRUCTION 2.1. Le système mécanique 2.2. Le système de puissance 2.3. Le système perceptif 2.A. Le système de commande 2.5. L ’out i11 âge
2.6. Le système mobile
3. LA FORME ARCHITECTURALE
3.1. Les sytèmes constructifs
3.2. Les règles de conception architecturale
A. INFLUENCE DES PERFORMANCES D ’UN ROBOT DE CONSTUCTION SUR LES ELEMENTS GENERANT LA FORME ARCHITECTURALE
A.l. Le nombre de degres de liberté A.2. Le domaine d ’atteignabi1ité A.3. La charge maximale
A.A. Le choix de l ’énergie
A.5. La précision des mouvements A.6. La vitesse des mouvements
A.7. La perception de l ’environnement A.8. Le mode de programmation
A.9. La vitesse de calcul
A.10. L ’autonomie décisionnelle A.11. Les préhenseurs
A. 12. Les outils d ’assemblage A.13. Le mode de déplacement A.1A. Le mode de guidage A.15. Le poids
A.16. L ’encombrement
5. TABLEAU RECAPITULATIF
6. CONCLUSION
6.1. Cahier des charges pour la robot-compatibi1ité des systèmes constructifs
6.2. Quel style architectural générera la robotisation
BIBLIOGRAPHIE
INTRODUCTION
Lorsqu'on se rappelle "la politique du chemin de grue" qui symbolise toute la production de logements des années 55/65, on ne peut s'empêcher d'avoir un mouvement de recul lorsqu'émèrgent des process technologiques évoqués au travers de la robotisation du bâtiment.
Parallèlement à l'évolution des matériaux, le progrès des outils participant à la construction des édifices est souvent déterminant sur les textures, les complexités d'assemblages, les rapports de matériaux différents entre eux, la qualité des structures, la forme architecturale et son écriture.
Il suffit de songer, après des siècles de technique de travail de la matière par soustraction (gravure, taille, coupe, ...) lorsqu'apparaissent le métal et les techniques additives ( rivetage, soudure, fonderie, ...), à la modification de l'écriture spatiale : les assemblages d'angles peuvent devenir facilement encastrés ou articulés, les treillis (c'est à dire les structures où le vide intersticiel est dominant), remplacent les éléments strictement pleins, etc...
Le X X 0 siècle est particulièrement marqué par des grandes innovations technologiques appliquées à la construction.
- apparition des outils de préfabrication des bétons. - mise au point d'outils coffrant performants
- mise au point d’outils de levage et manutention productifs et adaptables aux différentes configuration de chantier.
- mise au point d'outils spécifiques suivant les corps d'état, allant dans le sens de la spécialisation des tâches.
- allègement et "professionalisation" de l’outillage de chantier. - séparation des conceptions process à l'usine et réalisation in situ. - etc...
Ces améliorations, sur ce siècle, des performances des différents outillages ne sont pourtant que l'affinage de concepts déjà existants à la fin du XIX0 siècle.
La forme architecturale suit une évolution lente, sans solution de continuité, notamment des progrès des systèmes constructifs.
On se souvient, à ce propos, des avancés réalisées par Perret, Hennebique, Eiffel, puis les propositions architecturales de le Corbusier appuyées sur "l'alibi constructif" de l'industrialisation du bâtiment.
Bien que l'idée de répétitivité, d'abaissement des coûts, de diminution de la peine tende à faire améliorer les process, le principe humain fondamental reste présent, mémoire évidente des traditions artisanales du bâtiment, ou, plus près, des mouvements "Arts and Craft" et "Werkbundt".
La façon humaine reste le sceau de la qualité, de l'interpretation ultime des conceptions du maître d'oeuvre sur le site de construction (Gaudi).
Au fur et à mesure que les concepts de processus de fabrication du bâtiment se précisent et que les entreprises générales de bâtiment pèsent de plus en plus sur le circuit de production de la construction, on voit se confirmer la tendance de "conception en fonction de l'outil".
Dans une attitude rationnaliste, analogique aux démarches industrielles qui lient la "forme de série" à l'outil qui la fabrique, certains architectes imaginent des principes de conception de l'espace construit en fonction des matériels que les entreprises mettent à leur disposition.
La forme architecturale devient non plus cohérente, mais asservie au process de fabrication du bâtiment. Ces phénomènes sont particulièrement évidents dans tous les secteurs où des coûts bas et une forte pression de demande sont présents : logement social, construction scolaires, locaux industriels, ...
L'autre attitude des concepteurs qui s'interrogent sur les nouvelles possibilités de constuction est d'utiliser non seulement l'outil de production de bâtiment lui-même, mais d'imaginer de réels transferts de technologie, venant de l'industrie et qu'il serait possible d’appliquer au bâtiment moyennant l'apparition de nouveaux "composants” de bâtiment.
Le coup d'envoie est donné par le Crystal Palace, bâtiment emblématique, où Paxton résoud par la série, l'industrialisation de composant, l'emploi du verre et de l'acier, son problème de réponse au programme et de rapidité d'exécution.
Par son utilisation de la fonderie, Guimard souligne les tendances qui émergent au travers du "catalogue des fontes croisées". Les grilles arborescentes du métropolitain démontrent comment, par l'utilisation d'un procédé de fabrication, réservé traditionnelement à la production de corps de poêle, la forme utile dépasse le lien à la fonction pour développer une esthétique autonome, nouvelle, cohérente dans son contexte.
L'architecture devient liée aux produits qui sont mis en œuvre. La conception de l'espace est liée à la conception du produit, et donc au process de fabrication industrielle.
Cette attitude globale de conception est une pierre apportée à la naissance du design, dans le sens large de conception.
A cause de ces constats historiques simples, on est forcément poussé à se questionner sur l'influence de cette nouvelle logique de production sur la forme architectural : non pas en forme de défiance vis à vis d'un procédé (qui risquerait de conduire les raisonnements de conception vers la banalité appauvrissante de formes stéréotypées, uniquement motivées par une logique de production restrictive), mais au contraire sur un plan positif de façon à imaginer de nouvelles notions :
- Le robot peut-il n'être qu'un outil plus perfectionné à priori ? Est-il au contraire un outil plus limité que la main d'œuvre humaine, même si le mythe d'une automatisation complète parait réduisant ?
- L'utilisation du robot sur le site topologique particulier du chantier entraîne-t-elle des contraintes de conception liées à de nouvelles définition géométriques de l'espace ?
- Qu'est-ce que la robocompatibilité d'un produit de bâtiment ?
La logique de conception, par analogie avec les expériences industrielles actuelles, risque de déboucher sur le design de nouveaux produits de bâtiments permettant la mise au point de robots plus "polyvalents".
Quelles nouvelles logiques de conception (CFAO) entre design du produit et architecture industrialisée risquent-elles d'apparaitre ?
Quel est le niveau d'interaction, ou de dépendance, entre process robotisés, produit robocompatible, espace ?
L’etude qui suit essaie de faire un point très systématique sur l'état des connaissances actuelles, par le listage des différentes contraintes de la robotique appliquées au sujet de la production de bâtiment.
De cet examen, où chacune des notions n'est qu'évoquée (les contenus détaillés ont été développés dans des travaux du CEAA Architecture + Design de l'Ecole d'Architecture Paris-Tolbiac), se dégagent des tendances pour la constitution d'un "cahier des charges" d'une forme architecturale robocompatible.
0. LE
ROBOT
DE CONSTRUCTIONDé ( :i n i l 1 on de l’AFNOR du robot industriel:
Manipulateur (1) motorisé (2), automatique asservi en position
(3), reprogrammable (A), polyvalent (5), capable de
positionner et d ’orienter des matériaux, pièces, outils ou dispositifs spécialisés au cours de mouvements variables et programmés pour l ’exécution de tâches variées.
Dans l ’industrie, le produit est mobile par rapport au robot qui est à poste fixe. Dans la construction, au contraire, le produit (le bâtiment) est par définition immobile. C'est le robot qui se déplacé vers lui.
U n s y s t e m e r o b o t i q u e d e c o n s t r u c t i o n c o m p r e n d d o n c : a ) m a n i p u i a t e u r = > U n s y s t è m e m e c a n i q u e (2) m o t o r i s é = > U n s y s t è m e d e p u i s s a n c e (3 ) a u t o m a t i q u e a s s e r v i = > U n s y s t è m e d e p e r c e p t i o n ( M r e p r o g r a m m a b l e = > U n s y s t è m e d e c o m m a n d e ( ô t p o l y v a l e n t = > D e s o u t i 1 s (6) rn o b i 1 e = > U n s y s t e m e d e m o b i 1 i t ^ 2.1. LE SYSTEME MECANIQUE:
Il permet le déplacement et l ’orientation des composants ou des ou+ils, dans l ’espace. Tl se caractérisé par:
2.1.1. LES DEGRES DE LIBERTE
Bouger un objet requiert ju s q u ’à 6 mouvements: Pour le déplacer-, 3 translations : X-X '
Y-Y '
l-l '
Pour 1 ’o rien ter, 3 rotations : Roulis Tangage Lacet
Les degrés de liberté du robot: sont, parmi ces mouvements, ceux que le robot peut imposer aux
composants ou aux outils q u ’il manipule. Leur nombre théorique maximum est donc de 6, mais peut être réduit en fonction de la tâche à effectuer.
2.1.2. LA STRUCTURE MECANIQUE
Suivant les translations et les rotations
réalisables par la structure mécanique, celle-ci est dite:
Cartésienne (3 translations)
Cylindrique (2 translations + 1 rotation) Sphérique (1 translation + 2 rotations)
On note actuellement une prépondérance des robots a structure sphérique.
2.1.3. LE DOMAINE D 'ATTEIGNABILITE
Les mouvements de translation et de rotation de la structure mécanique sont nécessairement limites en
amplitude. Le domaine d ’atteigHabilite est
déterminé par les limites de cette amplitude. C ’est l ’ensemble des points de l'espace, pouvant être atteint par 1 ' extrémi té de la stru. "ure me c a n i q u e .
Dans le cas d'un robot a poste fixe . le domaine d’atteignabi 1 ite est un espace fini. Par contre, dans le cas d ’un robot mobile, cet espace e s t
etendu, voire infini. Cela est fonction de
l ’autonomie de déplacement dont jouit le robot.
2.2. LE SYSTEME DE PUISSANCE
Trois types d ’énergie forces et les cou p l e s
sont utilisés pour provoquer les n é c e s s a i r e s à l ’o b t e n t i o n des rotation des sont l ’énergie bobinés, ou les actionnent des mouvements de translation ou de
articulations du système mécanique. Ce électrique, qui actionne des moteurs énergies pneumatique ou hydraulique qui vérins.
actue11ement une L ’électricité prépondérante, des robots. occupe en fournissant de place l ’énergie à plus de 80Î, 2.3. LE SYSTEME PERCEPTIF
2.3.1. LES CAPTEURS PROPRIOCEPTIFS
Ils permettent la bonne exécution des mouvements du robot, en contrôlant de façon permanente les positions relatives des différentes parties de la structure mécanique.
2. 3. 1.1. LES CAPTEURS DE MOUVEMENTS RECTILINEAIRES Potentiomètres, transformateurs variables
2.3.1.2. LES CAPTEURS DE DEPLACEMENTS ANGULAIRES Potentiomètres, transformateurs variables
(synchros, resolveurs), codeurs optiques (incrémentaux, absolus)...
2.3.1.3. LES CAPTEURS DE VITESSE
Génératrices tachvmetriques à courant
continu ou alternatif, dynamos
t achvmétrique s . . .
2.3.2. LES CAPTEURS F.XTEROCEPTIFS
Ils fournissent des informations de presence, de proximité, de localisation, ou de configuration concernant l ’environnement du robot.
2.3.2.1. LES CAPTEURS TACTILS
Interrupteurs, butées, moustaches de
c h a t , palpeurs...
2.3.2. A. LES CAPTEURS MAGNETIQUES
2.3.2.2. LES CAPTEURS OPTIQUES
ou infra-rouges, caméras...
2.3.2.3. LES CAPTEURS ACOUSTIQUES
Emetteurs-récepteurs d ’ondes radios ou ultra-sonores...
2. A. LE SYSTEME DE COMMANDE
Il a pour fonction de générer les séquences des actions élémentaires à mettre en oeuvre pour' exécuter la tâche souhaitée, et de contrôler son exécution.
Il prend connaissance de la tâche programmée, traite les informations fournies par le système perceptif, et donne des consignes de mouvement à la structure mécanique.
2.4.1. LA PROGRAMMATION DES MOUVEMENTS
2.4. 1.1. LA PROGRAMMATION PAR APPRENTISSAGE
L ’extrémité active du robot est guidée par un opérateur humain (directement, par télécommande, ou par copie des mouvements d ’un bras svntaxeur). Les positions de la
structure mécanique sont alors
enregi strees.
2. 4. 1.2. LA PROGRAMMATION PAR LANGAGE
Elle est moins utilisée que la
précédente, car plus compliquée à
réaliser. Pourtant ses potentialités sont grandes: Programmation du robot pendant une tâche, programmation par définition mathématique d ’une trajectoire ou mime simplement d ’un objectif, prise en compte
des informations en provenance de
capteurs. . .
2.4.2. L ’EXECUTION DES MOUVEMENTS
Dans le cas d ’une programmation par apprentissage, les consignes de mouvement sont générées par une
simple relecture de l ’enregistrement initial.
Dans le cas d ’une programmation par langage les consignes sont le résultat de calculs effectués en temps réel, pour traiter les informations fournies par le système perceptif.
2.5. L ’OUTILLAGE
Pour raccourcir la durée des chantiers, la construction
du bâtiment fait de plus en plus appel à une
nréfabrication des composants. Sur le chantier. les
tâches à effectuer requièrent ainsi une qualification de moins en moins grande. Ce sont essentiellement des tâches de manutention, puis d ’assemblage.
Cette orientation de la construction vers la
j)réfabrication facilite sa robotisation. En effet, plus
les tâches sont simples et semblables, plus leur
robotisation est facile a réaliser.
Les robots de construction sont donc: des robots de montage, et non des robots de fabrication. Leur' travail
se décomposé essentiellement en deux taches: La
préhension des composants, et l ’assemblage des
composants .
Deux types d ’outils sont donc nécessaires: Des
préhenseurs et des outils d ’assemblage.
2.5.1. LES PREHENSEURS
Ventouses, expanseurs, électro-aimants, pinces,
préhenseurs fluidiques déformants, préhenseurs
mécaniques déformants...
2.5.2. LES OUTILS D ’ASSEMBLAGE
Visseuses, cloueuses, agrafeuses, soudeuses par points, pistolets a colle...
Dans l ’industrie manufacturière (automobile,
électronique, etc...)» les dimensions du produit
permettent sa mobilité. Le produit pouvant se déplacer vers l'outil, les robots industriels participant a sa fabrication peuvent donc être a poste fixe.
Dans la construction du bâtiment, le produit est, au contraire et par définition, immobile. Ses dimensions
sont importantes, et ne permettent pas l ’emploi de
robots à poste fixe. Ici, c ’est l ’outil qui doit se déplacer vers, dedans ou autour, du produit. Il est donc necessaire d ’adjoindre au système robotique habituel, uri
svstème de mobilité, caractérisé par:
2.6.1. LE MODE DE DEPLACEMENT
Base mobile montée sur roues, chenilles, pattes...
2.6.2. LE MODE DE GUIDAGE
Guidage de la base mobile par cable inductif enterré dans le sol, par marques au sol. par-rails. par balisage du site de construction...
3. LA FORME ARCHITECTURALE
Quelle définition peut-on donner de lu forme architecturale?
En réponse à cette question complexe, nous nous proposons ici de répertorier- tout les éléments qui concourent à la génese de
la forme architecturale.
La génèse de la forme architecturale peut s ’expliquer comme une composition de SYSTEMES CONSTRUCTIFS (ou "systèmes architecturaux") suivant un certain nombre de REGLES DE CONCEPTION ARCHITECTURALE.
3.1. LES SYSTEMES CONSTRUCTIFS
Un System- c o n s t r u c t i f peut erre caractérisé par:
Un ensemble de COMPOSANTS archi1 ecturaux combinables.
Une ou plusieurs techniques d 'ASSEMBLAGES.
Un SUPPORT GEOMETRIQUE de disposition des composants.
3.1.1. LES SYSTEMES DE STRUCTURE
3.1.:.l. LES COMPOSANTS DE STRUCTURE
Briques, parpaings. panneaux verticaux
préfabriqués, poteau;, poutres, consoles,
éléments de plancher modulaire,
charpentes préfabriquées, éléments de
structure tridimentionne11e , tirants,
éléments de contreventernents...
3 . 1 .1 .2. LES ASSEMBLAGES
Jointoiement au mortier, scellement,
boulonnage, rivetage, soudure, clavetage, emboîtement tenon-mortaise, chevillage...
3. 1.1. 3. LE SUPPORT GEOMETRIQUE
référence ACC option 1 ou 2 , voûte,
coupole, doubles courbures inverses,
structures plissées...
2. LES SYSTEMES D ’ENVELOPPE
3.1.2.1. LES COMPOSANTS D ’ENVELOPPE
Bardages, plaques ondulées, panneaux,
tuiles, ardoises, bardeaux bitumineux,
percements, vitrages, éléments isolants rapport é s . . .
3. 1.2. 2. LES ASSEMBLAGES
B o u 1onnage, vissage. clouage, collage, accrochage, agrapnage.••
3. 1.2. 3. LE SUPPORT GEOMETRIQUE
Calepinage, trame de façade, peine de toiture, voûte, coupole, double courbure inverse...
.3. LES SYSTEMES DE CIRCULATION VERTICALE
3.1.3.1. LES COMPOSANTS DE CIRCULATION VERTICALE Eléments préfabriqués b ’es ca i ie r . ri ' a s c e n s e u r- . d'escalier r o u 1 a n t . d ^ monte-charge...
3. 1.3. 2. LES ASSEMBLAGES
Boulonnage, vissage, scellement,
soudure...
3. 1.3. 3. LE SUPPORT GEOMETRIQUE
Hélico'ide, balancement, pente, étages. . .
.é. LES SYSTEMES DE PARTITION DES ESPACES
3.1.4.1. LES COMPOSANTS DE PARTITION DES ESPACES Briques platrieres, carreaux de plâtre, cloisons modulaires préfabriquées, portes
d ’intérieur...
3.1.4.2. LES ASSEMBLAGES
Collage au mortier adhésif, vissage,
clouage. . .
3.1.4.3. LE SUPPORT GEOMETRIQUE
Plan des espaces intérieurs, modulable
ou non, sous-trame de la trame de
structure...
3.1.5. LES SYSTEMES DE CIRCULATION DES FLUIDES
3.1.5.1. LES COMPOSANTS DES RESEAUX DES FLUIDES
Cables électriques, tuyaux, gaines,
conduits d'aération ou de fumée...
3.1.5. 2. LES ASSEMBLAGES
Connexion électrique par broches ou
barrettes, soudure, brasage, collage,
raccord vissé, instantané, à collets...
3.1.5. 3. LE SUPPORT GEOMETRIQUE
Reseaux guidés: par le tramage de la
structure, de l ’enveloppe ou des
partitions intérieures...
3.1.6. LES SYSTEMES DE COMMANDE
3.1.6.1. LES COMPOSANTS DE COMMANDE
Interrupteurs, disjoncteurs électriques, robinets, poignées de portes et fenêtres, vérous, manivelles de volets roulants...
3.1.6.2. LES ASSEMBLAGES
Boulonnage, vissage...
3.1.6.3. LE SUPPORT GEOMETRIQUE
Intégration de certaines commandes aux trames mural es...
.1.7. LES SYSTEMES D ’EQUIPEMENT
3. 1.7.1. LES COMPOSANTS D ’EQUIPEMENT
Luminaires, meubles chauffe-eau, chaudières, cheminées, ventilations climatiseurs, compteurs... sanitaires, radiateurs, mécaniques, 3.1.7.2. LES ASSEMBLAGES
vissage, boulonnage, scellement,
raccordement au réseau. . .
3. 1.7.3. LE SUPPORT GEOMETRIQUE
Intégration de certains équipement;-.. en particulier d ’éclairage. d ’aération, de climatisation ou de chauffage, aux trames murales ou de sol...
3.1.8. LES SYSTEMES D ’ORNEMENTATION-F IN ITI ON
3. 1.0.1. LES COMPOSANTS D ’ORNEMENTAT I ON-1 IVITION Parquets, carrelages, dalles de m o q u e 11 e . de plastique ou de polystyrène . papiers peints, moulures...
3. 1.8. 2. LES ASSEMBLAGES
Collage, clouage, agraphage. . .
3. 1.0. 3. LE SUPPORT GEOMETRIQUE
Sous-trame de la trame de conception
générale, composition géométrique...
LES REGLES DE CONCEPTION ARCHITECTURALE
3.2.1. LA REGLEMENTATION
Règlementation urbaine du POS, réglementât ion
technique des D T U , règlements de sécurité
3.2.2. LE PROGRAMME FONCTIONNEL
Implantation du bâtiment. fonctions et surfaces des espaces, organigramme...
3.2.3. LES IMPERATIFS ECONOMIQUES
Coûts d ’étude, de construction, de fonctionnement,
de maintenance, plus-values immobilières
programmées...
3.2.A. L ’EXPRESSION STYLISTIQUE
Ordres architecturaux, tracés régulateurs,
références culturelles, vocabulaire stylistique, proportions, échelle, morphologie...
4. INFLUENCE DES PERFORMANCES D ’UN ROBOT DE CONSTRUCTION SUR LES ELEMENTS GENERANT LA FORME ARCHITECTURALE
Le robot de construction est un outil complexe, compose de plusieurs systèmes technologiques, listés au chapitre 2.
La forme architecturale a une génèse complexe, composée de multiples éléments, listés au chapitre 3.
Dans ce chapitre A, l ’étude de l ’influence de la robotique de construction sur la forme architecturale, sera donc une etude
de l ’influence des performances de chaque système
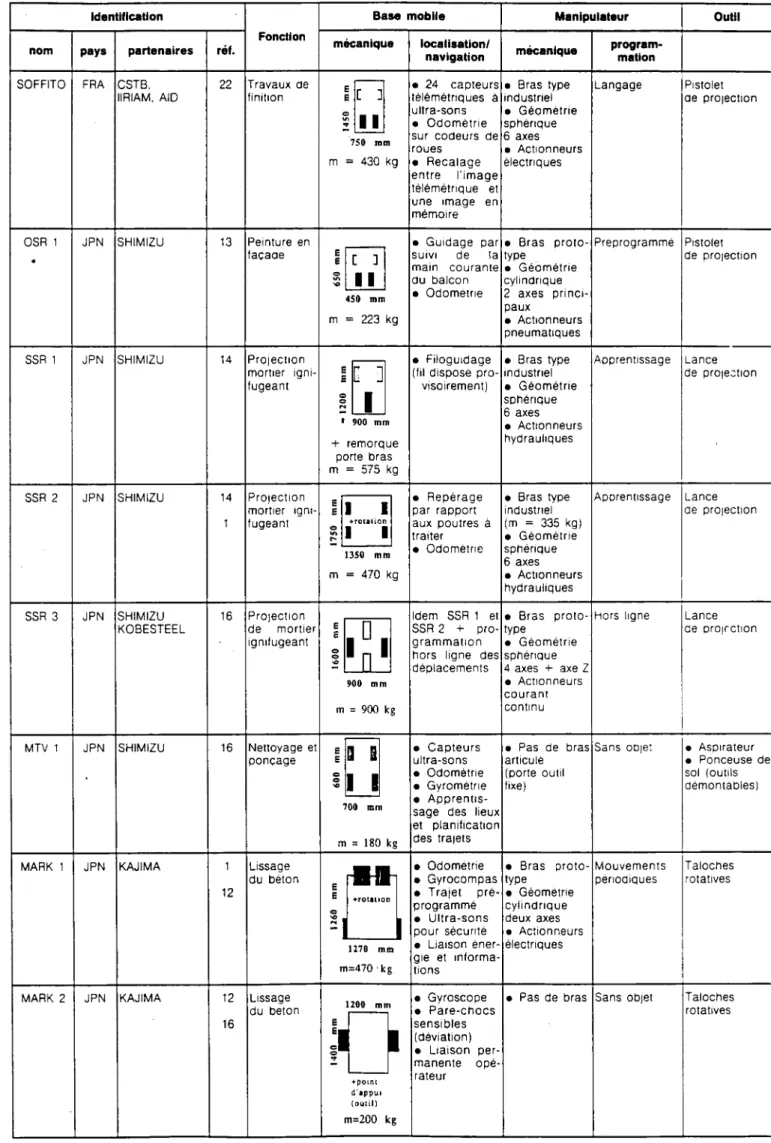
DEGRES DE LIBERTE:
Robot mobile Autovacc, de nettoyage des locaux. Robot à deux degrés de liberté, une translation et une rotation, dans le plan horizontal.
4.1. INFLUENCE DU NOMBRE DE DEGRES DE LIBERTE
Le nombre de degrés de liberté du robot influe sur les
possibilités de déplacement (3 translations) et de
positionnement (3 rotations) de l ’outil ou du composant q u ’il manipule dans l ’espace.
Performances actuelles:
Les robots industriels actuels peuvent être conçus avec autant de degrés de liberté que leur utilisation en
nécessite. Un grand nombre des robots commercialisés
actuellement possèdent ju s q u ’à 6 degrés de liberté. Aucun obstacle technique ne s ’oppose à la conception de tels robots .
4.1.1. INFLUENCE DU NOMBRE DE TRANSLATIONS
Les 3 translations permettent au robot de déplacer l ’outil ou le composant manipulé, respectivement suivant 3 directions orthogonales.
Robot à 1 translation:
Le déplacement de l ’outil ou du composant est limité à une droite.
Robot à 2 translations:
Le déplacement de l ’outil ou du composant est limité à un plan. C ’est le cas, par exemple, d ’un robot pour poncer le sol, ou d ’un robot pour poser du carrelage. Mais la finition du sol est la seule opération de construction limitée au plan, en l ’occurrence celui du sol.
Robot à 3 translations:
Le déplacement de l ’outil ou du composant est possible dans l’espace. Ces 3 translations sont
DEGRES DE LIBERTE:
Robot mobile Shimizu de lissage des dalles béton. Robot à trois degrés de liberté, deux
dans le plan horizontal.
indispensables pour réaliser la quasi-totalité des opérations de construction.
4.1.2. INFLUENCE DU NOMBRE DE ROTATIONS
Les 3 rotations permettent au robot d ’orienter l ’outil ou le composant manipulé, respectivement autour de 3 axes orthogonaux.
Robot à 1 rotation:
Il ne peut réaliser que des angles ou de simples courbures paralelles au plan de la rotation. Une
rotation autour d ’un axe vertical permet de
réaliser des murs (à angles ou courbes), des escaliers tournants... Une rotation autour d ’un axe horizontal permet de réaliser une couverture simple (à 1 ou plusieurs pentes, ou voûtée...).
Robot à 2 ou 3 rotations:
Il peut réaliser toutes les géométries, dont des
doubles courbures (coupoles, paraboloïdes
hyperbo1iques...).
La quasi-tota1ité des supports géométriques utilisés en architecture requière l ’emploi d ’un robot de construction à 6 degrés de liberté.
Performances futures:
Pour cette performance du système mécanique, il n ’y a plus de nouveau progrès à attendre de la robotique.
DOMAINE D ’ATTEIGNABILITE:
4.2. INFLUENCE DU DOMAINE D ’ATTEIGNABILITE
Le domaine d ’atteignabi1ité du système manipulateur du robot. etendu par l’utilisation d ’un système mobile, détermine la surface et le volume maximum du batiment pouvant s ’inscrire à l ’intérieur. Il influe donc sur
l ’échelle du projet, et sa programmation.
Performances actuelles:
Atteignabi1ité horizontale:
Grâce à un système mobile, le domaine d ’atteignabilité horizontal, peu’ etre etendu le long d ’une ligne: Robot monté sur- c: h a r r i o t ou sur portique, guide par des rails.
On aboutit alors a des projets linéaires, dont le
déroulement de la construction s ’apparente aux "chemins de grue" des année? 60. Il peut également être etendu en
plan: Robot monte sur plateforme mobile a direction
libre. Il devient alors possible de réaliser des projets aux surfaces étendues (cf. 4.13. mode de déplacement). Le domaine d ’atteignabilité horizontal du robot, influence donc le plan du projet architectural.
Atteignabilite verticale des plafonds:
Elle détermine la hauteur maximum de plafond, ou il e
couverture. réalisable par le robot. Les robots
actuellement commercialisés, même montes sur une
plateforme mobile, ne permettent pas de réaliser des espaces très hauts comme des halls publics, des salles de sport, de spectacle...
A t t e i g n a b i l i t e v e r t i c a l e des étages:
Elle détermine la possiblite pour le robot de construire
des étages. Plusieurs moyens sont envisageables pour
permettre au robot de construction d ’atteindre l ’étage supérieur: Soit en franchissant un escalier a l’aide de chenilles, soit en s ’y hissant par un moyen mécanique de
type monte-charge ou autre (cf. A.13. mode de déplacement).
Toutefois, le domaine d ’atteignabi1ité du robot mobile se trouve limité par ses capacités d ’autonomie énergétique et décisionnelle (cf A.A.2. autonomie énergétique, A.11. autonomie décisionnelle et A.1A. mode de guidage).
Influence sur le composant:
Un robot mobile dont le déplacement est limite aux
espaces intérieurs du bâtiment peut très difficilement intervenir sur l ’extérieur. Les interventions sur la façade telles que les finitions diverses, les poses d ’éléments d ’ornementation, de joints d ’étanchéité. de soutières , de luminaires., etc..., devenant impossibles,
il est donc necessaire de concevoir des composants -t des assemblages intégrant déjà les fonctions d'étanchéité extérieure, d'écoulement des eaux pluviales, d éclairage extérieur... Le problème est le meme pour' un robot mobile sur portique construisant le bâtiment par 1 'extérieur, et ne pouvant pas atteindre l'intérieur.
Influence sur la morphologie:
Le type de structure mécanique du robot (cartésienne,
cvlindrique, spherique ■ ajoute aux possibilité- de
déplacement du système mobile (linéaire. en plan,
vertical), déterminent le volume du domaine
d ’atteignabilité. Celui-ci peut adopter diverses
configurations (para 1 e 11epipédique, sphérique. torique, cylindrique...), pouvant avoir une influence sur Ici morphologie du bâtiment:
Si l'architecte cherche a optimiser l ’occupation de ce domaine d ’atteignabi1ite par du volume habitable.
Si l ’architecte recherche la mise en évidence d ’une correspondance entre l ’outil et la forme générée, entre les mouvements du robot (sa "chorégraphié") et la
morphologie architecturale.
Performances futures:
De meilleures performances sont à attendre dans le
domaine de l ’atteignabilité horizontale, et verticale des
étages, grâce au développement de nouveaux systèmes
mobiles, notamment à pattes, et de leur autonomie
énergétique et décisionelle. Des progrès seront plus difficiles a obtenir en ce qui concerne l ’atteignabilité verticale des plafonds.
4.3. INFLUENCE DE LA CHARGE MAXIMALE
Performances actuelles:
Les robots industriels commercialisés actuellement ont une charge maximale égale, en moyenne, au dixième de leur poids. Ces robots étant à poste fixe, peu d ’efforts ont été déployé pour réduire cette proportion charge maximale / poids du robot. De plus, ces robots sont conçus pour manipuler des composants industriels plus légers que des composants architecturaux courants tels que les éléments en béton préfabriqué, les pièces d ’ossature en acier, les
plaques de verre, etc... Il existe donc actuellement une forte inadéquation entre la faible charge maximale des robots industriels et le poids de composants couramment utilisés dans la construction.
4.3. 1. INFLUENCE DE LA CHARGE VERTICALE (composant)
La charge verticale détermine le poids maximum du composant manipulable par le robot. Connaissant la configuration du composant et la densité du ou des matériaux le constituant, on en déduit alors ses dimensions maximums. Puis, si l ’on rapporte les dimensions de ce composant, aux dimensions de l ’ouvrage à réaliser, on obtient le nombre de
composants nécessaires, et donc également le
nombre d ’assemblages.
Les composants les plus affectés par cette
limitation de poids sont les composants volumineux (poteaux, poutres, panneaux...) et constitués de matériaux denses (béton, acier, verre...). Ils
appartiennent aux systèmes constructifs de
structure, d ’enveloppe, de circulation verticale ou d ’équipement.
Pour devenir manipulables par le robot, ces
composants devront, soit perdre du poids en
RECHERCHE DE MEILLEURES PERFORMANCES POIDS/RESISTANCE DES STRUCTURES ARCHITECTURALES:
des efforts appliqués, soit être constitués de
matériaux plus légers, soit être divisés en
composants plus petits.
A.3.2. INFLUENCE DE LA CHARGE HORIZONTALE (prise au vent)
La prise au vent est un problème affectant
principalement les panneaux d ’enveloppe; la pose
des panneaux de partition intérieure pouvant,
elle, se faire à l ’abri du vent, une fois
l ’enveloppe réalisée.
La charge horizontale influe sur les dimensions des surfaces du composant opposées au vent, et sur son design, dont on recherchera éventuellement un meilleur aérodynamisme.
La charge maximale, tant horizontale que verticale, tend donc à réduire les dimensions de certains composants architecturaux, notamment de structure. Le problème se pose alors de pouvoir réaliser des ouvrages importants avec de petits éléments.
Ce problème nous entraîne alors soit vers une limitation de l ’échelle des projets, soit vers la recherche de
structures architecturales toujours plus performantes
dans leur rapport poids / résistance. On tombe alors, ici, dans un domaine de recherche propre aux architectes du courant "High-Tech", tels que Norman Foster, Renzo Piano ou Michael Hopkins. Ces architectes nous ont prouvé combien cette recherche pouvait avoir d ’influence sur la morphologie architecturale.
Le franchissement de portées importantes avec de petits éléments, est un exemple de problème pouvant entraîner
l ’architecte vers la conception de morphologies
particulières, telles que des voûtes, des coupoles, ou des structures tridimentionne11 es , qui sont loin d ’être neutres esthétiquement.
RECHERCHE DE MEILLEURES PERFORMANCES POIDS/RESISTANCE DES STRUCTURES ARCHITECTURALES:
Performances futures:
Trois voies de recherche peuvent être empruntées pour
parvenir à une meilleure adéquation entre la charge
maximale du robot et le poids des composants
architecturaux :
Recherche d ’un meilleur rapport charge maximale / poids du robot (système mobile compris). Un rapport de l/6ème peut être un objectif raisonnable à • moyen terme, notamment grâce à l ’emploi de matériaux plus performants dans les systèmes mécaniques et de puissance (cf. A.15. poids du robot). On sera toutefois encore bien loin des performances humaines égales à 1/3, voire 1/2.
Recherche d ’un meilleur rapport poids / performance de
certains composants de construction, notamment par
l ’utilisation de nouveaux matériaux.
Recherche sur la synchronisation des robots permettant leur "entraide" pour soulever de lourdes charges (cf. A.6.2. précision de la vitesse).
A.A. INFLUENCE DE L ’ENERGIE CHOISIE
Le choix de l ’énergie, électrique, pneumatique ou
hydraulique, par la technologie q u ’il implique, a une
très grande influence sur la précision, le poids,
l’encombrement et le coût (cf. respectivement A.5.,
A.15., A.16. et A.17.), ainsi que sur le rapport
puissance / poids et les possiblités d ’autonomie
énergétique du robot qui en résulte.
Electr. Pneu. Hydrau.
Précision Poids Encombrement Coûts Puissance/poids Autonomie A . A . 1 . INFLUENCE DU Performances
Le faible rapport puissance / poids du robot implique de réaliser des structures légères avec un robot de construction lourd.
D ’où la contrainte pour les fondations de la structure légère, d ’être surdimentionnées pour pouvoir supporter le poids important du robot pendant la seule duree du chantier. Contrainte qui se répercute bien-sûr également sur le coût du bâtiment .
Performances futures:
Un meilleur rapport puissance / poids permettra la construction de structures plus robustes avec un robot plus léger.
RAPPORT PUISSANCE / POIDS DU ROBOT
A terme, cette amélioration du rapport puissance /
poids, donnera au robot la possibilité de
manipuler des pièces, notamment d'ossature et de circulation verticale, d ’une inertie telle, que
l ’ouvrage réalisé sera assez résistant pour
supporter son poids. Ainsi, deviendra-t-il
possible pour le robot, à l ’instar de l ’homme, de construire des bâtiments à étages.
A.A.2. INFLUENCE DE L ’AUTONOMIE ENERGETIQUE
Rendre le robot autonome, c ’est-à-dire
physiquement indépendant de la source d ’énergie, permettra au robot d ’acquérir la mobilité, et par
la d ’accroître son domaine d ’atteignabilité.
Performances actuelles:
Trois possibilités sont envisageables pour
réaliser cette autonomie:
Par l ’installation d ’une liaison souple (sorte de
cordon ombilical) acheminant l ’énergie
(électrique, hydraulique nu pneumatique) entre la source d ’énergie et le robot mobile. Le domaine d ’ atteignabi1ité du robot mobile est alors limite par la longueur possible de ce cordon. De plus, ce cordon peut être une entrave aux mouvements du robot.
Par l ’utilisation du réseau électrique du bâtiment pour alimenter le robot en énergie. En même temps q u ’il en réaliserait l’extension, le robot mobile pourrait à tout moment se raccorder à ce reseau, pour s ’y alimenter en énergie. Cela nécessiterait de prévoir l ’emplacement de prises pour répondre
aux besoins prévisibles du robot pendant la
construct i o n .
plateforme mobile du robot. Le ravitaillement de ces batteries pourrait se faire soit par un retour du robot à sa base, soit par un branchement du robot sur le réseau électrique du bâtiment, comme proposé ci-dessus. Toutefois, ce ravitaillement entraînerait une perte de temps, donc une baisse du rendement du robot. De plus, le poids du robot se trouverait grandement accru par les batteries.
Performances futures:
Des batteries beaucoup plus légères sont
annoncées, notamment par les constructeurs
automobiles suite â leurs recherches sur les
4.5. INFLUENCE DE LA PRECISION DES MOUVEMENTS
Au cours du travail du robot de construction, trois phases requièrent de la précision dans les mouvements: la préhension du composant dans le stock, sa manipulation et son assemblage.
Préhension du composant:
Le composant doit être pris à un point précis, tel que, lorsqu’il se trouve manipulé dans l ’espace par le robot, le composant conserve un maximum d ’équilibre. Lorsque le robot connait les coordonnées spatiales de ce point, soit il est assez précis pour y mener seul le préhenseur, soit il est nécessaire de l ’aider, de le guider, en équipant le composant d ’un repère formel. Ce repère qui peut être une prise mâle, femelle, conique, etc..., sera reconnu
par le préhenseur comme étant le point précis de
préhension. Cette adaptation formelle serait une
nouvelle contrainte à prendre en compte dans le design du c ompo s a n t .
Manipulation du composant:
Le manque de précision du robot peut rendre impossible la
manipulation de composants fragiles, tels que des
vitrages. La précision des mouvements du robot oriente donc le design de certains composants vers la recherche d ’une plus ou moins grande résistance aux chocs.
Assemblage du composant:
La précision des mouvements du robot va déterminer de
quelle minutie le robot est capable en matière
d ’assemblage. Les assemblages électriques (raccords
fil-domino...) ou de plomberie (raccords mâle-femelle...) seront certainement impossibles à réaliser avec un robot
de construction conçu pour des assemblages
majoritairement moins minutieux, de structure,
--- -—
W U
rzx.-^
PRECISION DES MOUVEMENTS:
Robot de lissage Laser-Screed S 240, grâce à intégrée dans son bras téléscopique, nivelle et précision de l ’ordre du millimètre.
1’informatique lisse avec une
Ces composants devront donc subir des adaptations
formelles rendant leurs assemblages compatibles avec
l ’imprécision du robot. Ces adaptations formelles
pourront consister en une reconception des systèmes de connexion, notamment des fluides, avec une utilisation
fréquente de biseautages, cônes, chanfreins, jeux,
etc..., destinés à récupérer, lors des assemblages,
l ’imprécision du robot.
Si dans les tâches de second-oeuvre, la précision du robot risque d ’être inférieure à celle de l ’électricien, du plombier ou du peintre, cette même précision peut. en revanche. apporter au gros-oeuvre une meilleure qualité de réalisation des assemblages.
Performances actuelles:
La précision des robots actuels va de quelques microns, a plusieurs millimètres. En général, l ’augmentation de la charge maximale s ’accompagne d ’une diminution de la
précision. Ainsi, des robots assez puissants pour
soulever de lourds composants de structure ou
d ’e n \ e 1o p p e , ne seraient-ils pas assez précis pour assembler des composants d ' é 1 eetricite ou de plomberie, et inversement.
Performances futures:
Peut-être le développement de robots capables d'allier puissance et précision...
A.6. INFLUENCE DE LA VITESSE DES MOUVEMENTS
A.6.1. INFLUENCE DE LA RAPIDITE D ’EXECUTION DES TACHES
Nombreux sont les robots industriels actuels dont la vitesse des mouvements est bien supérieure aux possibilités humaines. De plus, cette vitesse peut rester constante, sans nécessiter aucune période de repos .
La rapidité d ’exécution des taches est, avec la puissance et le coût du robot, un des principaux
paramètres qui permettront à la robotique de
construction de devenir concurrentielle par
rapport a la main d ’oeuvre.
A. 6.2. INFLUENCE DE LA PRECISION DE LA VITESSE
La précision de la vitesse des mouvements influe
sur les possibilités de synchronisation des
robots. Elle va ainsi déterminer la possibilité pour plusieurs robots de travailler en même temps, à une même tâche, telle que, par exemple, la manipulation d'un composant lourd.
Performances actuelles:
Actuellement, la synchronisation des mouvements de plusieurs robots est difficilement réalisable. En effet, chaque mouvement exécuté par un robot est le résultat de plusieurs mouvements approximatifs successifs, sans cesse corrigés par des capteurs proprioceptif s , j u s q u ’à l ’obtention du résultat programmé. Ces allers et retours entre le système de puissance et les capteurs sont d ’une durée aléatoire. Ainsi, un robot peut-il être au milieu d ’un mouvement, quand un autre l ’a déjà terminé.
Il est donc, pour l ’heure, difficilement
envisageable de faire travailler ensemble et à une même tâche plusieurs robots.
Utiliser un robot préhenseur pour maintenir le composant en position, pendant q u ’un autre réalise
l'assemblage (clouage, vissage...) étant
difficile, il est donc préférable de recourir à
des assemblages sans outils, tels que des
clipsages, collages, emboîtements mâle-femelle...
Performances futures:
La synchronisation des robots aura pour principale conséquence de permettre l ’emploi de composants plus lourds et plus grands, pouvant être manipulés
par plusieurs robots. Cela permettra la
construction avec moins de composants, et donc moins d ’assemblages, de structures plus robustes. Ces structures plus résistantes supporteront plus aisément le poids des robots, et donc autoriseront la réalisation par ces robots, de bâtiments a étages. D ’où, finalement, une influence sur les
morphologies architecturales et les programmes
4.7. INFLUENCE DE LA CAPACITE DE PERCEPTION DE L ’ENVIRONNEMENT
4.7.1. INFLUENCE DU MODE DE REPERAGE DES COMPOSANTS
Le robot doit être capable de repérer dans le stock, le composant à prendre. Plusieurs modes de repérage peuvent être envisagés:
Le robot connait les coordonnées exactes du
composant dans le stock:
Il n ’a pas besoin de capteur extéroceptif pour repérer le composant. Mais, ceci n ’est réalisable que si le stock est organisé et positionné de façon très précise sur le chantier, et pendant toute la durée du chantier.
Le robot ne connait pas les coordonnées exactes du composant dans le stock:
Il utilise des capteurs extéroceptifs pour repérer le composant. Le composant peut se signaler aux capteurs par un repère formel (capteur tactil), graphique (capteur de vision), métallique (capteur magnétique), etc... L ’apposition d ’un tel repère sur le composant est alors une nouvelle contrainte à prendre en compte dans son design. De plus, l’organisation et le positionnement du stock sur le chantier peuvent être moins précis.
4.7.2. INFLUENCE DU MODE DE REPERAGE DE L ’ENVIRONNEMENT
Le robot doit en permanence pouvoir connaître sa
position sur le site, et également celle du
composant ou de l ’outil q u ’il manipule.
Constamment cette position est comparée avec
celle prévue par la programmation du robot. Puis s ’en suivent d ’éventuelles corrections.
Divers procédés sensoriels peuvent aider le robot à connaître sa position. Les plus simples, les
PERCEPTION DE L ’ENVIRONNEMENT:
Robot mobile de peinture Soffito du C.S.T.B., se repère grâce à une ceinture d ’émetteurs-récepteurs d ’ondes ultra-sonores
Ce).
Mais pour pouvoir réfléchir les ondes sous toutes leurs
déterminer sa proximité avec un élément du site.
D ’autres, plus complexes, sont basés sur le
principe d ’une prise de mesures angulaires, ou de distance, suivie d ’opérations de triangulation:
Sur le robot: Capteur magnétique Emetteurs-récepteurs d ’ultra-sons Caméra tournante Récepteur d ’émissions lasers ou infra-rouges Antenne réceptrice Sur le site: Circuit métallique intégré au sol
Texture murale propre à réfléchir les ondes
Balisage graphique
Emetteurs tournants dans un environnement sans poussière
Emetteurs d ’ondes radios
Le site de construction doit donc être aménagé d ’une façon très fine, très propre et très précise avant le début des travaux.
Certains de ces systèmes sensoriels, optiques,
tactils ou accoustiques, peuvent également
permettre de détecter des obstacles accidentels sur le site.
A.8. INFLUENCE DU MODE DE PROGRAMMATION
Performances actuelles:
La programmation par apprentissage:
Les tâches sont exprimées au robot par une manipulation du robot lui-même, ou d ’un syntaxeur, par l'homme.
Dans l ’industrie, la programmation des robots s ’effectue en grande majorité par apprentissage, car elle est simple dans son principe. Mais, elle est longue et fastidieuse.
Cette programmation par apprentissage n ’est donc rentable que si l ’investissement nécessaire en temps est ensuite amortit par une grande répétitivité des tâches. Cette répétitivité peut se situer a differents niveaux, suivant le nombre de tâches q u ’elle concerne. En robotique de construction, cette répétitivité peut se situer, soit au
niveau constructif (répétition d'un même principe
constructif, comme l ’empilement de briques ou la
juxtaposition de carreaux de fa'ience), soit au niveau spatial (répétition d ’un même espace, comme au sein d ’un hôpital ou d ’un immeuble de bureaux), soit au niveau urbain (répétition d ’un même bâtiment, comme la maison individuelle). De plus, ce type de programmation par apprentissage ne permet pas l ’usage de capteurs ou la coordination de plusieurs robots.
La programmation par langage:
Les tâches sont exprimées au robot par un langage
symbolique, énonçant sous forme codée quelles
articulations doivent bouger, a quel moment, suivant quelle vitesse ou amplitude.
Ce mode de programmation est plus compliqué, mais plus rapide. Les tâches n ’ont plus pour obligation d ’être
répétitives, mais peuvent, au contraire, être très
variées. Ce qui peut se traduire par également plus de variété au niveau constructif, spatial et urbain.
Performances futures:
La programmation avec simulation:
Les tâches sont exprimées au robot par l ’utilisation d ’un système de CAO simulant graphiquement sur écran les mouvements du robot .
Ces systèmes de CAO robotiques, modélisant les mouvements du robot, pourraient à l ’avenir être couplés avec les systèmes de CAO architecturale, modélisant, eux, la forme architecturale sous forme d ’un assemblage des composants archit ecturaux.
La programmation implicite:
Les taches sont exprimées au robot en termes d ’objectifs, sans détailler- les mouvements intermédiaires.
Il s'appuiera sur des outils d ’intelligence artificielle
qui, à partir de leur connaissance des composants
(geometrie, poids...) et de ! 'environnement (exploitation
des résultats issus de capteurs), définiront
implicitement les mouvements a réaliser pour atteindre les objectifs voulus. Ce mode de nrogrammation sera, pour l ’homme, d ’une utilisation extrêmement simple et rapide. Ce qui augmentera les possibilités et la compétitivité de la robotique de construction.
4.9. INFLUENCE DE LA VITESSE DE CALCUL
Une augmentation de la vitesse d ’interprétation des données fournis par les capteurs, diminue la durée de réalisation des tâches. Elle permet également au robot de réaliser des tâches plus complexes, demandant une multitude de contrôles, et dans des conditions plus
difficiles (faible éclairage...).
La vitesse de calcul a donc une influence directe sur le rendement du robot, et par là, sur l ’économie du projet.
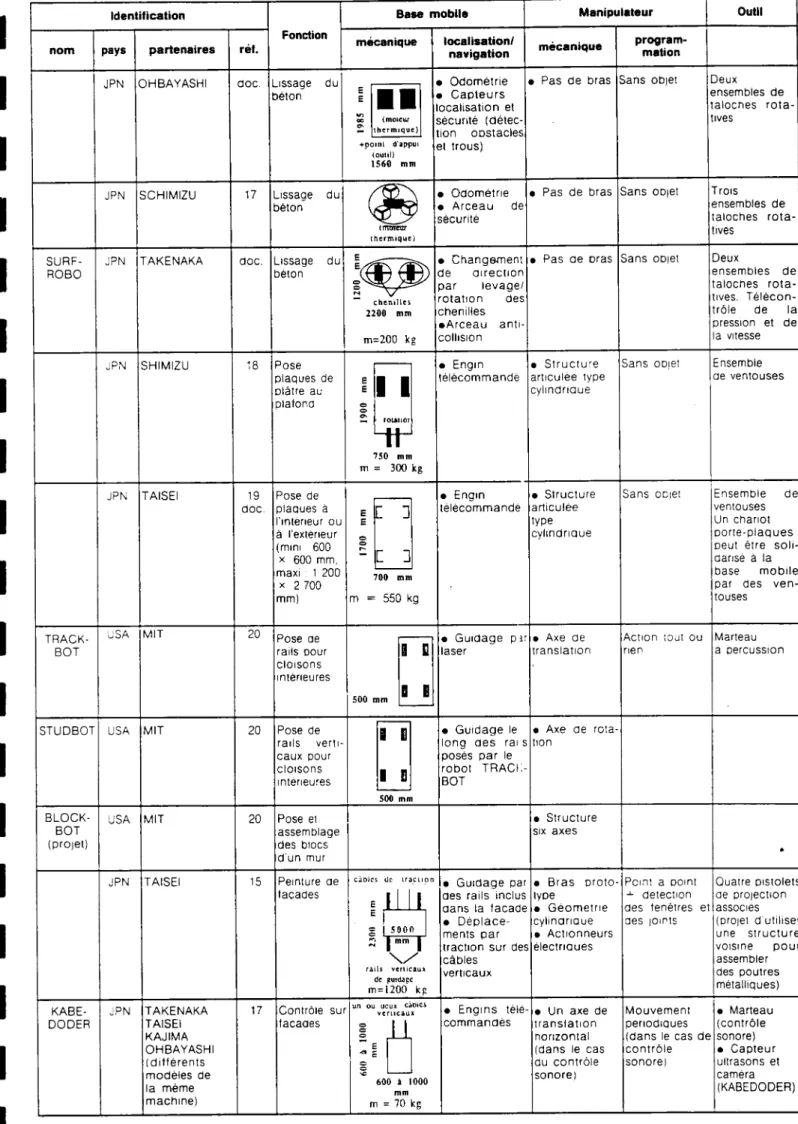
AUTONOMIE DECISIONELLE: Robot Mighty
composants de pour cet engin
Hand de Kajima, permet de mettre en place des façade. Mais peut-on vraiment parler de robot de chantier, qui manifestement est téle-opéré ?
A. 10. INFLUENCE DE L ’AUTONOMIE DECISIONNELLE (I.A.)
Performances actuelles:
Actuellement, les robots sont doublement dépendants au niveau décisionnel.
La première dépendance est d ’ordre physique: Le robot est en permanence relié à l ’armoire de commande par un
cordon ombilical, qui permet la transmission des
commandes, le dialogue homme-machine, les contrôles. En effet, de part son poids et son encombrement, l ’armoire peut difficilement être transportée sur la base mobile.
La deuxième dépendance est d ’ordre intellectuelle: Le robot. est incapable de réagir seul, sans assistance humaine, face à des situations inattendues, c ’est-à-dire pour lesquelles il n ’a pas été programmé.
Performances futures:
Une miniaturisation de l ’armoire de commande permettra à
celle-ci d ’être embarquée sur la base mobile. Ou
peut-être verra-t-on se développer des procédés
d'émission-réception de données et d'ordres par liaison radio.
En ce qui concerne l ’autonomie intellectuelle,
l ’intelligence artificielle devrait, dans un horizon a
moyen terme (5 à 10 ans) apporter de grandes
a mé 1i orat ions:
L ’intelligence artificielle facilitera le dialogue
homme-machine en permettant aux deux partenaires de raisonner au même niveau conceptuel. Elle pourra servir à résoudre des problèmes nouveaux, auxquels les systèmes traditionnels n ’apportent pas directement de réponse. En particulier, l ’intelligence artificielle, permettra au robot, dans le cas de situations inattendues, de se reprogrammer tout seul. Elle permettra alors de réaliser
des économies en assistance humaine.
Les techniques d ’intelligence artificielle apporteront également plus d ’autonomie aux robots par rapport à leur environnement. Ceci pour le plus grand profit des robots mobiles qui, dotés d ’un raisonnement, pourront arriver à leur but, sans que leur navigation ou un itinéraire
doive-t-être préprogrammé. Sachant se déplacer dans
n ’importe quel environnement, ils n ’influenceront donc plus le dessin des plans.
A. 11. INFLUENCE DES PREHENSEURS
Performances actuelles:
Plusieurs systèmes de préhension, ayant chacun des
performances très différentes, peuvent être utilisés.
Les ventouses :
C ’est un système peu puissant. Les composants doivent donc être relativement légers. Les composants peuvent être d ’un matériau et d ’une forme quelconque. Seul, le
point de préhension, ne doit pas être porreux. Au
maximum, comme le bois ou le carton qui peuvent e+re
pris par des ventouses a turbine, encore moins
puissantes. Le point de préhension doit également
présenter une surface dépoussiérée, plane et lisse; une
rogusité trop importante risquant d ’user trop
rapidement la ventouse en plastique ou caoutchouc. b- contact avec la pièce est doux, rendant possible la prise de composants fragiles, comme des vitrages.
Les électro-aimants:
Ils sont beaucoup plus puissants que les ventouses, er permettent donc de soulever des charges importantes. Ij -permettent de manipuler des composants de forme: ^ t matériaux quelconques. Seul, le point de préhension doit être en un matériau ferro-magnétique. Les risques de
chocs ou de glissements lors de la préhension, rendent leur utilisation limitée à des composants ne craignant ni les chocs, ni les rayures.
Les pinces:
Elles ne s ’adaptent pas à toutes les dimensions, ni toutes les morphologies d ’objets, ce qui peut être un inconvénient dans le domaine de la construction où les composants sont de tailles et des formes très variées. Toutefois, les pinces ont pour avantage de permettre une
PREHENSION :
"Robot" de pose de plaques de plâtre de Taisei, équipé de ventouses pour la préhension, et pour la jonction de sa base mobile avec le chariot magasin.
prise précise. Le coiposant devra avoir un coefficient, de frottement suffisant, pour ne pas glisser entre les pinces. En outre, plus le composant est lourd, plus sa résistance a la dureté doit être grande. En effet, pour être soulevé, un composant lourd nécessite un fort serrage de la pince, auquel le matériau doit opposer une résistance a la dureté suffisante.
Les expanseurs :
Leur utilisation est assez contraignante. Ils ne peuvent s ’adapter q u ’à des composants présentant des trous
circulaires ayant des parois au coefficient de
frottement suffisant.
Dans le domaine du bâtiment, les composants sont de formes. dimensions, et matériaux très varie.-,. beux solutions peuvent être envisagées, pour permettre leur préhension par un seul robot:
Soit rendre tous ces composants compatibles avec un seul
préhenseur. Ce préhenseur imposera au design des
composants des contraintes trec fortes. parfois même contradictoires avec les contrainte-, d ’usage.
Soit equiper le robot d ’un système de changement
automatique de préhenseur, le porteur étant équipé d'une partie standard sur laquelle viennent s ’adapter les différents préhenseurs.
Performances futures:
On recherchera des systèmes de préhension plus
universels. compatibles avec tout matériau, forme ou dimens ion.
Les préhenseurs fluidiques déformants:
Ce sont des sortes de membranes constituées d ’une
composants les mêmes contraintes que les ventouses plus grandes, à une exception près: Ces préhenseurs ont le grand avantage de pouvoir s ’adapter à des zones de préhension non planes, permettant ainsi la préhension de composants aux formes complexes, totalement arrondies par exemple.
Les préhenseurs mécaniques déformants:
Ces préhenseurs cherchent à acquérir les capacités de préhension universelle de la main de l ’homme. Ils s ’inspirent de ses articulations, en multipliant les rotations pour pouvoir envelopper la forme à saisir. Ils s'inspirent de sa peau, et multipliant les capteurs miniaturisés dans l ’épaisseur d ’une peau artificielle.
Ces deux système de préhension plus universels, seront moins contraignant pour le design du composant, et
auront donc une moindre influence sur la forme
architectural e .
Influence du poids du préhenseur:
Il faut tenir compte du fait que le poids du préhenseur est i n d u dans la charge transportable par 1*- porteur, entrainant une diminution de la charge nette admissible. Les électro-aimants, en particulier, sont relativement 1ourds.
A.12. INFLUENCE DES OUTILS D ’ASSEMBLAGE
On part en effet du principe que le robot de
construction est un outil n ’effectuant que des tâches de montage des composants, et aucune tâche de fabrication,
ni de transformation de ces composants (cf. 2.5.
l’outillage). Ce sont donc uniquement des outils
d ’a s s emb1 â g e .
Performances actuelles:
Les outils d ’assemblage actuellement utilisés dans la construction peuvent facilement être manipulés par un
robot. Déjà dans l'industrie, existent des robots
sachant manier' la pince à souder. la visseus^ oc ]e pistolet a colle.
La construction utilise plusieurs types d ’assemblage, et donc autant d ’outils. Pour simplifier la conception du robot, leur nombre doit être limité au minimum. Ce qui
influencerait fortement le design des composants.
Toutefois, il serait illusoire de vouloir parvenir à l ’utilisation d'une seule technique d'assemblage pour tous i e s composants de la construction. Comme pour les préhenseurs, il est donc necessaire d'équiper le robot, d ’un système de changement automatique d'outil.
Performances futures:
Pour simplifier encore la tâche assemblage, peut-être mettra-t-on au point des assemblages ne nécessitant pas
l ’emploi d ’outil, tels que des clipsages ou des
A. 13. INFLUENCE DU MODE DE DEPLACEMENT
A. 13.1. INFLUENCE DU MODE DE DEPLACEMENT HORIZONTAL
Performances actuelles:
Plusieurs domaines d ’activité emploient
actuellement des robots mobiles de manutention, de nettoyage des lieux publics, d ’entretien des conduits, d ’intervention en milieu hostile comme le nucléaire... Deux systèmes de mobilité sont utilisés, à roues ou à chenilles.
Les systèmes à roues:
Leur conception technique est relativement
simple, mais ils imposent à l ’environnement
quelques contraintes. En particulier, les
changements de direction nécessitent des espaces libres importants, qui devront être prévus lors de la conception des plans. De plus, le sol doit
être parfaitement plan, propre et avoir un
coefficient de frottement adapté au bandage des r o u e s .
Les systèmes à chenilles:
Leur conception technique est plus complexe, mais ils sont beaucoup moins contraignants pour l ’environnement. Ils ont l ’avantage de pouvoir tourner sur eux-mêmes, donc dans des espaces
réduits. De plus, ils peuvent évoluer sans
effort sur des terrains accidentés.
Performances futures:
Les robots à pattes:
Outre le fait q u ’ils sont parfaitement adaptés
MODE DE DEPLACEMENT VERTICAL:
Construction de la Hong-Kong and Shanghai Bank de Norman Foster. Les grues, perchées au sommet de la tour, se déplacent verticalement grâce à des vérins. Ces vérins, tout comme des pattes, prennent appui sur la structure pour hausser la grue,
A . 1 3.2
princ ipa1 avantage de pouvoir sou 1ever de
1ourdes charges (robot + préhenseur +
composant ) le domaine
. Ce qui sera un atout de la construction.
important dans
INFLUENCE DU MODE DE DEPLACEMENT VERTICAL
Performances actuelles:
Les robots à chenilles peuvent monter et
descendre des escaliers en toute stabilité. Leur utilisation peut toutefois avoir une influence
sur l ’inclinaison de l ’escalier.
Performances futures:
Les robots a pattes (voir ci-dessus) seront bien adaptés au franchissement des escaliers.
On peut également imaginer de nouveaux concepts de déplacement vertical du robot, liés a de nouveaux concepts de construction. Le mode de
déplacement. vertical des grues pendant la
construction de la tour de Norman Foster, à Hong-Kong, peut, par exemple. être une piste
4.14. INFLUENCE DU MODE DE GUIDAGE
Performances actuelles: Le guidage
Les robots mobiles employés actuellement dans
l ’industrie ne sont jamais totalement autonomes dans
leurs déplacements. Leur mobilité reste limitée au
circuit d ’un rail ou d ’un fil magnétique.
Les robots filoguidés:
Ils suivent des chemins complexes, matérialisés par des cables inductifs enterrés dans le sol.
Cette technique de guidage est fiable et bon marché, mais son usage reste limité à des tâches sans facteur d ’incertitude, dans un environnement structuré et a des opérations simples.
Sa transposition de l ’atelier industriel, au chantier de construction passe par une nécessaire et rigoureuse organisation du site de construction. Le tracé au sol des circuits doit permettrent au robot une circulation
compatible avec le plan du bâtiment, et une
atteignabi1ité de tous les points de la construction.
Les robots sur rails:
Ils ont des cheminements beaucoup plus rigides que les robots filoguidés. Car les changements de direction, en particulier, nécessitent des rayons de courbure plus
importants. Mais les rails peuvent être posés
directement sur des fondations. La réalisation d ’un plancher lourd, qui aurait uniquement servi a supporter le poids du robot, n ’est alors plus nécessaire. C ’est le robot lui-même qui peut assurer la pose d ’un plancher léger entre les rails.
Performances futures: L'autonomie
L ’autonomie de déplacement du robot sera facilitée par le développement de systèmes sensoriels permettant au
robot de connaître sa position dans le plan ou dans l’espace, et non plus seulement le long d ’un fil ou de rails (cf. A.7.2. mode de repérage de 1 ’environnement ).
Le système de commande d ’un robot autonome, par rapport à celui d ’un robot guidé, nécessitera en plus une modélisation de l ’environnement et une stratégie de navigation.
Modélisation de l ’environnement:
L ’objectif serait de constituer une base de connaissance qui serait embarquée sur un robot et que celui-ci mettrait lui-même à jour en fonction de son expérience
sur le chantier de construction.
Stratégie de navigation:
C ’est-à-dire la capacité du robot de réagir dans tout les cas de figure imprévus q u ’il va rencontrer'. Ceci impose une programmation très spécifique. Or, la plupart de ces programmations nécessitent des temps de calcul incompatibles avec la contrainte de rapidité de réaction du robot. Des etudes. basées sur la compilation du
langage, sont en cours pour pallier cet inconvénient.
Un tel système de commande imposera beaucoup moins, et voire pas du tout, de contraintes sur les éléments générant la forme architecturale des édifices.