DÉTERMINATION DU MODULE RÉVERSIBLE DES
MATÉRIAUX GRANULAIRES À L’AIDE DE L’ESSAI
PRESSIOMÉTRIQUE
Mémoire présenté
à la Faculté des études supérieures de l’Université Laval dans le cadre du programme de maîtrise en génie civil pour l’obtention du grade de maître ès sciences (M.Sc.)
DÉPARTEMENT DE GÉNIE CIVIL FACULTÉ DES SCIENCES ET DE GÉNIE
UNIVERSITÉ LAVAL QUÉBEC
2011
UNIVERSITÉ LAVAL
DÉPARTEMENT DE GÉNIE CIVIL,
OPTION GÉOTECHNIQUE
Ce mémoire intitulé:
DÉTERMINATION DU MODULE RÉVERSIBLE DES MATÉRIAUX GRANULAIRES À L’AIDE DE L’ESSAI PRESSIOMÉTRIQUE
présenté par: CIZA, Ferdinand
en vue de l’obtention du diplôme de: Maîtrise ès Sciences (M.Sc.) a été dûment accepté par le jury d’examen constitué de:
M. FORIERO, Adolfo, Ph.D., membre et directeur de recherche
M. LADANYI, Branko, Ing. (Zagreb), D. Sc. (Louvain), membre et professeur émérite à l’Université de Montréal
M. SILVESTRI, vincenzo, Ph.D (Mc Gill), membre et pofesseur titulaire à l’École Polytechnique de Montréal
Dédicace
À mes chers parents, qui m’ont fourni l’énergie nécessaire pour aller jusqu’au bout… Aux membres de ma famille : Rosemarie Ngenda, Fatima Chiza, Armel Chiza, Albert Chiza
REMERCIEMENTS
Les travaux présentés dans ce mémoire de thèse ont été réalisés dans le cadre du projet de recherche GE-004-09, au Complexe scientifique du ministère des Transports du Québec, direction du laboratoire des chaussées. Ils ont été rendus possibles grâce à l’Université Laval, à l’École Polytechnique de Montréal, au ministère des Transports du Québec et au MITACS qui ont apporté le soutien technique et surtout financier.
Mes premiers remerciements vont à Monsieur Adolfo Foriero, ing., Ph.D., professeur et mon directeur de mémoire, qui m’a accompagné tout au long de ma formation. Sa disponibilité et son soutien au cours de certains de mes moments difficiles ont été d’une grande qualité et d’un immense réconfort. Merci infiniment Monsieur Adolfo Foriero.
Je remercie aussi Monsieur Silvestri Vicenzo, ing., Ph.D. (McGill), actuellement professeur titulaire à l’École polytechnique de Montréal, pour ses conseils lors de l’acquisition du pressiomètre.
J’exprime toute ma gratitude à Madame Allison Howe, coordonnatrice administrative des stages au Québec, et à Monsieur Denis St-Laurent, ingénieur du service des chaussées, pour avoir fait un suivi sur toutes les facturations reliées à ce travail de recherche.
Je tiens aussi à dire un grand merci à Monsieur Félix Doucet, ingénieur du service des matériaux d’infrastructure, pour sa bonne humeur et sa disponibilité tout au long de ce travail.
Mes remerciements vont également à tous les membres du personnel du service des matériaux de chaussée pour leur accueil et / ou leur collaboration.
Un merci particulier à Madame Anne Laverdière et à Monsieur Bruno Auger du service des matériaux d’infrastructure, qui m’ont apporté tout le soutien technique nécessaire à la réalisation des essais.
Je ne saurais oublier de remercier toutes les personnes qui me sont chères pour l’aide, la confiance et le soutien dont elles ont fait preuve tout au long de ces deux années.
Cet ouvrage a été rendu possible grâce à Monsieur Jean-Christophe Vuillemard, professeur, département Sciences des aliments et nutrition, et à Monsieur Guy Doré, ing., PhD, professeur titulaire de la chaire industrielle du CRSNG i3C, département de génie civil, à l’Université Laval. Ils m’ont donné un encadrement scientifique et leur contribution m’a été d’une aide précieuse.
Je remercie sincèrement les membres du jury qui ont procédé à l’évaluation et à l’acceptation de mon mémoire ; leurs observations m’ont aidé à améliorer la qualité de mon travail.
Enfin, j’exprime ma dernière pensée aux professeurs et étudiants de l’Université Laval pour leur encouragement et leur support.
RÉSUMÉ
L’une des raisons de la dégradation prématurée des routes en Amérique du Nord serait les propriétés mécaniques inadéquates des matériaux. Devant le peu d’informations sur le comportement anisotrope des matériaux granulaires dans la littérature, le service des matériaux d’infrastructure du ministère des Transports du Québec a accepté de soutenir le projet (GE-004-09) qui porte sur la détermination du module réversible des matériaux granulaires utilisés pour construire les fondations des routes.
Les études montrent que le module réversible (MR) des sols de chaussée est un paramètre
essentiel pour le dimensionnement et l’analyse des chaussées revêtues d’enrobé. Selon la méthode de conception (AASHTO, 2002), les différentes couches de la structure de la chaussée sont choisies et dimensionnées de façon à ce que la couche d’infrastructure reste dans la limite des tolérances des déformations élastiques.
Afin de déterminer le MR, des essais triaxiaux et pressiométriques ont été effectués dans les
installations du ministère des Transports du Québec. Les essais pressiométriques ont été réalisés dans un moule compacteur, conçu spécialement pour effectuer les essais verticaux et horizontaux. Les résultats obtenus des essais pressiométriques diffèrent de ceux des essais triaxiaux (13 kg de matériau granulaire). Des valeurs obtenues à partir de l’essai pressiométrique sur un matériau représentatif de chaussée (72 kg) démontrent qu’il y a une évidence d’anisotropie stucturale dans la fondation et la sous-fondation. Il ressort que le rapport d’anisotropie (Er/Ez ) est à peu près égal à 15 %, ce qui concorde avec celui de
Tutumluer et al., (2003).
Finalement, l’essai pressiométrique est très prometteur car il permet non seulement la détermination de l’anisotropie, mais il permet à l’ingénieur de développer une confiance dans les résultats à cause de la forme de la courbe pression-volume.
ABSTRAT
One reason for the premature deterioration of roads in North America is inadequate mechanical properties of materials. Given the limited information on the anisotropic behavior of granular materials in the literature, the « Service des matériaux d’infrastructure du ministère des Transports du Québec » agreed to support the project (GE-004-09) which relates to the determination of resilient modulus of granular materials used to build the foundations of roads.
Studies show that the resilient modulus of pavement soils is a key parameter for the design and analysis of paved asphalt roads. According to the design method (AASHTO, 2002), the different layers of the pavement structure are dimensioned so that the infrastructure layer remains within tolerated limits of elastic deformations.
In order to determine the resilient modulus, triaxial and pressuremeter tests were performed in the facilities of the « Ministère des transports du Québec ». Pressuremeter tests were carried out in a mold compactor, designed specifically for vertical and horizontal testing. The results of pressuremeter tests differ from those (13 kg of granular material) of the triaxial tests. Values obtained from the pressuremeter tests on representative road material (72 kg), demonstrate the existence of structural anisotropy in the foundation and subgrade sections. It appears that the anisotropic ratio (Er/Ez) is roughly equal to 15%, which is
consistent with results obtained by Tutumluer et al., (2003).
Finally the pressuremeter test is very promising because, not only does it allows for the determination of anisotropy, but also allows the engineer to develop confidence in the results due to the shape of the pressure-volume curve.
Table des matières
REMERCIEMENTS ... i RÉSUMÉ ... iii ABSTRAT ... iv 1 INTRODUCTION ... 1 1.1 Mise en contexte ... 1 1.2 Problématique et objectifs ... 2 1.3 Méthodologie ... 42 ÉTAT DES CONNAISSANCES... 5
2.1 Généralités ... 5
2.2 Éléments constitutifs de la chaussée ... 6
2.3 Anisotropie des matériaux routiers et leurs origines ... 7
2.4 Comportement des matériaux granulaires ... 8
2.5 Comportement anisotrope des matériaux routiers ... 8
2.6 Caractérisation du sol d’infrastructure ... 9
2.7 Définition du module réversible ... 10
2.8 Facteurs influençant le module réversible ... 11
2.8.1 Effet de la contrainte ... 11
2.8.2 Effet de la densité ... 13
2.8.3 Effet de la granulométrie ... 14
2.8.4 Effet de la teneur en eau ... 15
2.9 Façons d’évaluer le module réversible ... 17
2.10 Origine et développement de l’essai pressiométrique ... 18
3 PROGRAMME EXPÉRIMENTAL ... 22
3.1 Origines et sources des matériaux ... 22
3.2 Description des essais triaxiaux et paramètres visés ... 25
3.3 Préparation de l’échantillon ... 29
3.4 Compactage de l’échantillon ... 29
3.5 Démoulage de l’échantillon ... 29
3.6 Mesurage de l’échantillon ... 30
3.7 Installation des capteurs de déplacement ... 30
3.8 Installation de la chambre de confinement ... 31
3.9 Caractéristiques de l’échantillon ... 31
3.10 Mode opératoire de l’essai triaxial ... 32
3.10.1 Conditionnement de l’échantillon ... 32
3.10.2 Caractérisation du module réversible ... 33
3.10.3 Caractérisation à la teneur en eau initiale ... 33
3.10.4 Caractérisation à la teneur en eau saturée ... 33
3.10.5 Caractérisation à la teneur en eau drainée ... 34
3.11 Calcul et expression des résultats ... 35
3.11.1 Détermination du MR et du Vr ... 35
3.12 Modélisation non linéaire de MR et Vr ... 37
3.13 Rapport d’essai triaxial ... 39
3.14 Description des essais pressiométriques et paramètres visés ... 45
3.15 Utilisation du moule fabriqué à l’Université Laval ... 48
3.15.1 Phase A : Compaction et prise de mesure pour l’essai radial ... 49
3.15.2 Phase B : Compaction et prise de mesure pour l’essai axial ... 52
3.16 Préparation de l’échantillon pour le compactage ... 53
3.17 Compactage ... 57
3.18 Opérations de remplissage initial du pressiomètre ... 58
3.19 Opérations d’étalonnage ... 61
3.20 Réalisation des essais pressiométriques ... 65
3.21 Caractéristiques de l’échantillon ... 68
3.22 Démoulage de l’échantillon ... 68
3.23 Calcul des résultats ... 68
4 ANALYSE ET INTERPRÉTATION DES RÉSULTATS ... 69
4.1 Validation des résultats avec la variation du coefficient de Poisson ... 89
5 DISCUSSION, CONCLUSION ET RECOMMANDATIONS ... 101
BIBLIOGRAPHIE ... 103
ANNEXES ... 106
ANNEXE 1 : Préparation de l’échantillon (MG-20-001-10) ... 107
ANNEXE 2: Caractéristiques de l’échantillon (MG-20-001-10) ... 108
ANNEXE 3 : Préparation de l’échantillon (MG-112-002-10) ... 109
ANNEXE 4 : Caractéristiques de l’échantillon (MG-112-002-10) ... 110
ANNEXE 5 : Préparation de l’échantillon (MG-20-003-10) ... 111
ANNEXE 6 : Caractéristiques de l’échantillon (MG-20-003-10) ... 112
ANNEXE 7 : Préparation de l’échantillon (MG-20-004-10) ... 113
ANNEXE 8 : Caractéristiques de l’échantillon (MG-20-004-10) ... 114
ANNEXE 9 : Préparation de l’échantillon (MG-20-005-10) ... 115
ANNEXE 10 : Caractéristiques de l’échantillon (MG-20-005-10) ... 116
ANNEXE 11 : Préparation de l’échantillon (MG-20-006-10) ... 117
ANNEXE 12 : Préparation de l’échantillon (MG-20-006-10) ... 118
ANNEXE 13 : Compaction essai vertical (vue générale) ... 119
ANNEXE 14 : Compaction essai vertical (vue en coupe) ... 119
ANNEXE 15 : Mesure avec couvercle (vue générale) ... 120
ANNEXE 16 : Mesure avec couvercle (vue en coupe) ... 120
ANNEXE 17 : Mesure avec rallonge (vue générale) ... 121
ANNEXE 18 : Mesure avec rallonge essai vertical (vue en coupe) ... 121
ANNEXE 19 : Compaction essai horizontal (vue générale) ... 122
ANNEXE 20: Compaction essai horizontal (vue en coupe) ... 122
ANNEXE 21 : Mesure avec couvercle (vue générale) ... 123
ANNEXE 22 : Mesure avec couvercle (vue en coupe) ... 123
ANNEXE 23 : Mesure avec rallonge (vue générale) ... 124
ANNEXE 24 : Mesure avec rallonge (vue en coupe) ... 124
ANNEXE 25 : Plaque de base ... 125
ANNEXE 27 : Bouchon de côté pour essai vertical B ... 125
ANNEXE 28 : Chambre de compaction ... 126
ANNEXE 29 : Tube vertical ... 126
ANNEXE 30 : Guide du tube ... 127
ANNEXE 31: Capuchon de blocage ... 127
ANNEXE 32 : Chasse-tube ... 127
ANNEXE 33 : Couvercle d’essai ... 128
ANNEXE 34 : Rallonge de chambre ... 128
ANNEXE 35 : Disque de répartition troué ... 128
ANNEXE 36 : Bouchon C ... 129
ANNEXE 37 : Bouchon de côté pour essai horizontal D ... 129
ANNEXE 38 : Tube horizontal ... 129
ANNEXE 39 : Bouchon du couvercle E ... 129
ANNEXE 40 : Disque de répartition non troué ... 130
Liste des tableaux
Tableau 1: Origine et source des échantillons ... 23
Tableau 2: Densité et absorption (%) ... 24
Tableau 3: Granulométrie, % passant ... 24
Tableau 4: Courbes granulométriques ... 25
Tableau 5: Résultat de l’essai triaxial # MG-001-10 ... 39
Tableau 6: Résultat de l’essai triaxial # MG-002-10 ... 40
Tableau 7: Résultat de l’essai triaxial # MG-003-10 ... 41
Tableau 8: Résultat de l’essai triaxial # MG-004-10 ... 42
Tableau 9: Résultat de l’essai triaxial # MG-005-10 ... 43
Tableau 10: Résultat de l’essai triaxial # MG-008-10 ... 44
Tableau 11: Préparation de l’échantillon ... 54
Tableau 12: Caractéristiques de l’échantillon ... 55
Tableau 13 : Perte de volume ... 62
Tableau 14: Résistance de la membrane ... 64
Tableau 15: Présentation des résultats ... 88
Tableau 16: Validation des résultats (MG 112-00-10) ... 89
Tableau 17 : Validation des résultats (MG-003-10) ... 90
Tableau 18: Validation des résultats (MG-004-10) ... 91
Tableau 19: validation des résultats (MG-005-10) ... 92
Tableau 20 : validation des résultats (MG-005-10) ... 93
Tableau 21: Valeurs typiques d’un sable isotrope ... 94
Tableau 22: MG-001-10(MR versus Ez) ... 95 Tableau 23: MG 112-002-10) (MR versus Ez) ... 96 Tableau 24: MG 20-003-10) (MR versus Ez) ... 97 Tableau 25: MG 20-004-10) (MR versus Ez) ... 98 Tableau 26: MG 20-005-10) (MR versus Ez) ... 99 Tableau 27 : MG 20-005-10) (MR versus Ez) ... 100
Liste des figures
Figure 1: Matériau granulaire de diamètre maximum 20 mm (Source : MTQ) ... 1
Figure 2: Dimensionnement d’une chaussée ... 3
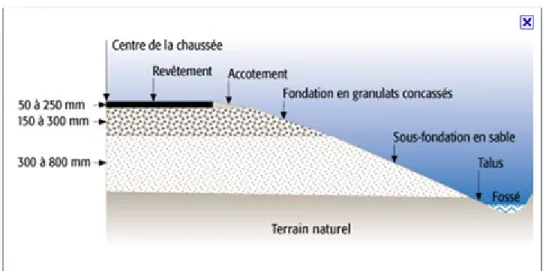
Figure 3: Éléments constitutifs de la chaussée (Source : MTQ) ... 6
Figure 4 : a) Efforts de compaction et b) Charges de trafic (Source : MTQ) ... 7
Figure 5: Conditions axisymétriques de l’anisotropie ... 9
Figure 6: Définition du module réversible ... 11
Figure 7: Contraintes appliquées à l’échantillon (tiré de Robert et al., 2002) ... 12
Figure 8 : Contraintes au passage d’une roue (tiré de Lekarp et coll., 2000) ... 13
Figure 9: Influence de la densité sèche sur le MR (d’après Li et Selig, 1994) ... 14
Figure 10: Valeurs de MR vs agrégats à différentes gradations (Tian et coll., 1998) ... 15
Figure 11: Variation du MR vs teneur en eau (tiré de Khoury, 2004) ... 16
Figure 12: MR vs degré de saturation (tiré de Wolfe et Butalia, 2004) ... 17
Figure 13: Principe de l’essai pressiométrique (Phuong Thao Nguyen Pham, 2008) ... 20
Figure 14 (a) et (b) : Correction de la membrane et du volume (Phuong, 2008) ... 20
Figure 15: Courbe pressiométrique corrigée (Phuong Thao Nguyen Pham, 2008) ... 21
Figure 16: Équipements utilisés pour la détermination du comportement mécanique des matériaux granulaires ... 26
Figure 17: Contrainte déviatorique (Source : Huang, 1993) ... 27
Figure 18: Installation des capteurs de déplacement et du capteur de succion matricielle (Source : Félix Doucet, 2007) ... 28
Figure 19: Charge déviatorique répétée appliquée et ... 36
Figure 20: Module réversible en fonction de la contrainte totale ... 38
Figure 21: Pressiomètre (Ménard) ... 45
Figure 22: Sonde introduite dans le forage préalable (déformations axiales) ... 46
Figure 23: Sonde introduite dans le forage préalable (déformations radiales) ... 47
Figure 24: Moule fabriqué à l’Université Laval ... 48
Figure 25 : Chambre de compaction ... 49
Figure 26: Surface égalisée du matériau compacté ... 51
Figure 27: Matériau humidifié ... 56
Figure 28 : Compaction pour l’essai vertical (déformations radiales) ... 57
Figure 29 : Remplissage initial du pressiomètre (Ménard) ... 60
Figure 30 : Déroulement de l’essai pressiométrique ... 65
Figure 31 : Caractéristiques du sol ... 66
Figure 32 : Courbe corrigée ... 67
Figure 33: Résultats de l’essai radial #1 ... 69
Figure 34: Courbe corrigée de l’essai radial # 1 ... 70
Figure 35: Résultats de l’essai horizontal #1(déformations axiales) ... 72
Figure 36: Module réversible axial #1 ... 73
Figure 37: Résultats de l’essai radial # 2 ... 74
Figure 38: Courbe corrigée de l’essai radial # 2 ... 75
Figure 39: Résultats de l’essai axial # 2 ... 76
Figure 41: Résultats de l’essai radial # 3 ... 78
Figure 42: Courbe corrigée de l’essai radial # 3 ... 79
Figure 43: Résultats de l’essai axial # 3 ... 80
Figure 44: Courbe corrigée de l’essai axial # 3 ... 81
Figure 45: Résultats de l’essai radial # 4 ... 82
Figure 46: Courbe corrigée de l’essai radial # 4 ... 83
Figure 47: Résultats de l’essai axial # 4 ... 84
Figure 48: Courbe corrigée de l’essai axial # 4 ... 85
Figure 49: Courbe corrigée de l’essai axial # 5 ... 86
1 INTRODUCTION
1.1 Mise en contexte
Étant donné le peu d’informations dans la littérature sur le comportement anisotrope des matériaux granulaires non liés, le service des matériaux d’infrastructure du ministère des Transports du Québec (MTQ) a accepté de soutenir le présent projet qui porte sur la détermination du module réversible des matériaux granulaires d’un diamètre maximum de 20 mm (MG-20) (figure 1), utilisés pour construire les fondations des routes.
Figure 1: Matériau granulaire de diamètre maximum 20 mm (Source : MTQ)
En effet, le module réversible (MR) est largement accepté comme paramètre isotrope et
comme la meilleure mesure des propriétés mécaniques des sols et des matériaux routiers. L’évaluation du MR au MTQ se réalise dans une cellule triaxiale à chargement cyclique.
Cette méthode d’essai permet, en laboratoire, de représenter très fidèlement l’état de contrainte et les conditions de sollicitation des matériaux routiers, mais l’essai dure longtemps (3 à 5 jours) et l’équipement est coûteux (plus ou moins 150 000 $).
En considérant la complexité de l’essai triaxial et le coût des équipements requis pour déterminer le MR de façon fiable, le projet de recherche proposé repose sur l’utilisation de
l’essai pressiométrique à cause de ses avantages variés. Son équipement coûte à peu près quarante mille dollars, facile à transporter et l’essai est rapide (6 ou 7 minutes). La qualité de l’essai est évaluée à partir de la courbe pression-volume. Par conséquent, l’ingénieur peut se fier aux résultats. Les modules mesurés à partir de l’essai peuvent être considérés comme les paramètres de base du sol de chaussée puisque, à travers l’utilisation de la théorie élastique multicouche par exemple, ils sont bien adaptés à l’étude de la performance de la chaussée. Cependant, nous devons tenir compte du fait que chaque couche est isotrope. L’essai peut s’effectuer avant, pendant ou après la construction de la chaussée. C’est pourquoi il peut être utilisé pour l’évaluation des chaussées existantes aussi bien que pour la conception des nouvelles chaussées.
Bref, l’essai est économique et peut être réalisé dans tous les types de sols à condition de bien choisir la technique de mise en place de la sonde.
1.2 Problématique et objectifs
L’une des raisons de la détérioration prématurée des routes en Amérique du Nord, ce sont les propriétés inadéquates des matériaux. Pour simplifier la conception, les chaussées sont dimensionnées avec l’hypothèse que les matériaux sont homogènes et isotropes alors que dans la réalité ils ne le sont pas. Selon Tutumluer et al. (2003), les couches des chaussées ont une rigidité verticale supérieure à la rigidité horizontale (Eh = 15%Ev). Les
conséquences du dimensionnement basé sur les modèles de comportement isotrope sont les déformations à la surface de la fondation et de la sous-fondation.
En effet, selon Seyhan et al. (2005), les déformations calculées avec des modèles anisotropes sont supérieures à celles calculées avec des modèles isotropes.
Donc, l’hypothèse des matériaux granulaires isotropes conduit à sous-dimensionner les chaussées flexibles et à surévaluer le nombre d’applications de charge que la chaussée peut supporter (voir figure 2).
Figure 2: Dimensionnement d’une chaussée
Généralement, la cause la plus cruciale est l’absence dans la littérature d’une étude approfondie sur le comportement anisotrope des matériaux granulaires d’un diamètre maximum de 20 mm (MG-20), très utilisés pour construire les fondations des routes.
L’objectif principal de la recherche est de déterminer le rapport d’anisotropie dans la fondation et la sous-fondation plutôt que dans le sol d’infrastructure.
Les objectifs spécifiques de l’étude sont :
Utiliser les équipements usuels des essais pressiométriques verticaux et horizontaux afin de déterminer le module réversible anisotrope des matériaux granulaires de type MG-20.
Interpréter les résultats.
1.3 Méthodologie
La réalisation de ce projet comporte cinq chapitres.
Le premier chapitre ou l’introduction, permet d’apprécier le contexte, la pertinence et l’importance de la recherche envisagée au ministère des Transports du Québec. Il s’agit de la détermination du module réversible anisotrope des matériaux granulaires, utilisés pour construire les fondations et les sous-fondations des routes. En effet, les études montrent que le module réversible des sols de chaussées est un paramètre essentiel pour le dimensionnement et l’analyse des chaussées revêtues d’enrobé. L’introduction comporte ainsi la description des objectifs à atteindre, des équipements et de la méthodologie utilisés pour l’évaluation structurale des chaussées.
Le chapitre 2 présente une synthèse de l’information pertinente sur le comportement anisotrope des matériaux granulaires et les différents paramètres de conception, plus particulièrement sur le module élastique réversible. Une brève description des principes des essais effectués lors de l’étude y est également faite. Cette évaluation de l’état des connaissances a été orientée sur l’anisotropie structurale, due à l’orientation préférentielle des particules pendant le déversement des matériaux et aux efforts de compaction.
Le chapitre 3 définit le programme expérimental du projet. Il présente une identification de six sites couvrant une gamme de sols de chaussées, utilisés pour construire la fondation et/ou la sous-fondation. On y trouve les paramètres visés, le type d’instrumentation utilisée ainsi que la description des essais réalisés. Au MTQ, un rapport d’essai triaxial a été produit pour chacune des teneurs en eau, ce qui nous a servi de référence pour la préparation de l’essai pressiométrique.
Le chapitre 4 présente l’analyse détaillée ainsi que de l’interprétation des résultats portant sur l’évaluation de l’anisotropie structurale. La validation a été faite en utilisant les bases de données provenant de la littérature.
Le dernier chapitre présente une brève discussion sur les essais triaxiaux et préssiométriques dans la détermination du module réversible, la conclusion et les recommandations.
2 ÉTAT DES CONNAISSANCES
2.1 Généralités
Les routes sont des axes de communication nécessaires au développement économique et social d’une région et de sa population. Elles permettent le transport des marchandises et le déplacement des personnes, assurent l’occupation du territoire ainsi que l’exploitation des ressources. Le dimensionnement d’un tel ouvrage consiste à déterminer la nature et l’épaisseur des couches qui le constituent afin qu’il puisse résister aux agressions variables et complexes auxquelles il sera soumis tout au long de sa vie utile, le climat et le trafic étant les plus importantes. Plus spécifiquement, au Québec, les variations climatiques importantes, comme les hivers rigoureux, les étés chauds, une grande quantité de précipitations, entraînent des détériorations diverses, notamment la fissuration thermique, le soulèvement différentiel en période de gel, l’orniérage et la diminution de la capacité structurale en période de dégel, ce qui accélère l’évolution de la fissuration de fatigue.
La sous-fondation assure la distribution des charges sur le sol support de façon à maintenir les déformations à ce niveau dans les limites admissibles. Elle empêche aussi la contamination des couches supérieures et assure le drainage de la fondation. La sous-fondation protège également la structure des effets de l’eau et du gel.
2.2 Éléments constitutifs de la chaussée
Une chaussée est en général constituée, de haut en bas, d’une couche de revêtement, d’une couche de fondation, d’une couche de sous-fondation et d’une couche de sol d’infrastructure compacté (figure 2). Les couches de fondation et de sous-fondation sont utilisées sous une chaussée souple principalement pour augmenter la capacité portante de la chaussée et permettre ainsi une meilleure distribution des charges. Dans les régions froides et humides, comme dans la province de Québec, les couches de fondation et de sous-fondation peuvent aussi procurer un drainage et offrir une protection supplémentaire contre le gel. Retenons que la chaussée est un système multicouche où chacun des éléments joue un rôle important. C’est une structure en apparence simple, mais un ouvrage linéaire de grande envergure. Il s’agit d’une interaction très complexe avec son environnement et plus spécifiquement avec le trafic et le climat.
En conclusion, les méthodes modernes de dimensionnement des chaussées exigent une bonne connaissance des propriétés mécaniques des matériaux et une étude approfondie du comportement de ces matériaux.
2.3 Anisotropie des matériaux routiers et leurs origines
Nous distinguons deux types d’anisotropie des sols (figure 4): l’anisotropie structurale ou inhérente de la fondation et de la sous-fondation, due à l’orientation préférentielle des particules pendant le déversement et aux efforts de compaction; et l’anisotropie induite produite, due aux charges de trafic et/ou cycles de gel et dégel, la durée de vie de la route.
Figure 4 : a) Efforts de compaction et b) Charges de trafic (Source : MTQ)
Dans le cas des matériaux granulaires non liés, l’anisotropie inhérente ou de structure est due à la fois aux effets de la gravité et aux efforts de compactage. En compactant les matériaux, nous obtenons un confinement vertical différent du confinement horizontal. L’anisotropie induite est due aux charges de trafic et éventuellement aux effets des cycles de gel et dégel.
2.4 Comportement des matériaux granulaires
Les matériaux granulaires non liés démontrent un comportement élasto-plastique relativement complexe lorsqu’ils sont soumis à des cycles de charge répétés, tels que la circulation et le trafic (Lekarp et al, 2000).
L’ampleur de la déformation élastique dépend de la rigidité élastique, tandis que la proportion de déformation permanente est directement reliée à la différence entre la contrainte appliquée et la contrainte de rupture qui a la propriété de croître après plusieurs cycles d’application de charges (Lambert et al., 2006). En d’autres mots, la rigidité d’un matériau détermine sa capacité à répartir les charges.
2.5 Comportement anisotrope des matériaux routiers
Les couches de chaussée en matériaux granulaires non liés ont une isotropie transversale. Pour décrire complètement le comportement d’un matériau anisotrope, nous avons besoin de 21 constantes élastiques (Love, 1927). Pour l’anisotropie transversale, nous n’avons besoin que de 5 constantes qui sont Ez, Ex, vxx, vzx et vzz. La première lettre dans les
indices doubles désigne la direction de chargement tandis que la seconde lettre désigne la direction de mesure.
En laboratoire, nous pouvons déterminer les 5 paramètres élastiques à partir des essais conventionnels. Graham et Houlsby (1983) ont suggéré cette méthode dans la résolution des problèmes sur l’anisotropie structurale prépondérante, qui est de nature transversale.
Les conditions axisymétriques (figure 5) de l’anisotropie sont représentées par les équations d’élasticité suivantes : (équation 1) 1 2 (1 ) rz z Z r z r zr rr r z r E E E E
Par superposition: (v
rz/vzr) = (Er/Ez) (équation 2)
Figure 5: Conditions axisymétriques de l’anisotropie
2.6 Caractérisation du sol d’infrastructure
La connaissance du module réversible est importante pour calculer les contraintes, les déformations ou les déflexions dans chacune des couches de la chaussée. En effet, le Guide de conception de l’AASHTO (1993) suggère l’utilisation du module réversible d’infrastructure (MR) pour la conception des structures des chaussées.
Étant une mesure des propriétés élastiques, le MR peut être déterminé directement par des
essais en laboratoire. Donc, la caractérisation du sol d’infrastructure est importante pour les étapes de dimensionnement des chaussées.
2.7 Définition du module réversible
Dans l’analyse de conception des chaussées, le MR est un paramètre essentiel au
dimensionnement. C’est ainsi que le module de chaque couche associé à son épaisseur permet de définir une structure multicouche pour laquelle il est possible de modéliser le comportement contrainte-déformation sous charge. Le MR est le rapport entre la contrainte
déviatorique ζd appliquée et la déformation élastique réversible ou récupérable εr,
1 3 ( ) d R r r M = 2G (1+v) où (équation 3) G = module de cisaillement, v = coefficient de Poisson, ζd = contrainte déviatorique (ζ1- ζ3),
ζ1 = contrainte majeure principale,
ζ3 = contrainte mineure principale, et
εr = déformation élastique réversible ou récupérable.
Ce comportement est montré à la figure 6 et indique que dans la plupart des cas les matériaux granulaires des chaussées ne sont pas purement élastiques et exposent un comportement élastoplastique. Cela signifie qu’ils sont en partie élastiques sous une charge statique mais éprouvent une certaine déformation permanente ou récupérable, laquelle est incluse dans la mesure du MR. Pour cela, on pourrait la considérer élastique si la charge de
répétition était assez petite comparée à sa capacité ; autrement, la structure de sol serait endommagée.
Figure 6: Définition du module réversible
2.8 Facteurs influençant le module réversible
Le MR des matériaux granulaires est influencé par différents facteurs. Dans cette étude, les
effets de la contrainte, de la densité, de la granulométrie et de la teneur en eau seront pris en considération.
2.8.1 Effet de la contrainte
Les contraintes effectives ont été définies en 1943 par Terzaghi. Celui-ci a déterminé que les contraintes en un point quelconque d’une section à travers un échantillon de sol peuvent être calculées à partir des contraintes principales σ1, σ2 et σ3 qui agissent en ce point.
La figure 7 montre les contraintes appliquées à l’échantillon lors de l’essai triaxial, où les contraintes ζ2 et ζ3 sont égales et la contrainte ζ1 est la somme de la contrainte de
confinement ζ3 et de la contrainte déviatorique ζd. Ce sont les contraintes principales
Figure 7: Contraintes appliquées à l’échantillon (tiré de Robert et al., 2002)
Dans ce contexte, les matériaux de chaussée sont formés de grains solides, d’eau et d’air et leur comportement mécanique est non linéaire, complexe et il dépend des contraintes appliquées. Il est connu que les matériaux granulaires fins, en particulier, présentent une dilatance qui est attribuée au mouvement des particules ayant tendance à se retourner selon l’action des contraintes induites au matériau. Cet effet de pression limite augmente la rigidité du MR des couches granulaires. Autrement dit, l’effet de l’état de contrainte est le
facteur qui a la plus grande influence sur le MR des matériaux granulaires.
Lekarp et coll. (2000) ont démontré dans leurs recherches que le MR a une tendance à
augmenter significativement avec l’augmentation de la pression de confinement et de la somme des contraintes principales. De plus, au passage d’une roue sur une chaussée, l’axe des contraintes majeure (1) et mineure (3) subit une rotation et la contrainte de
cisaillement est renversée. La figure 8 représente ce phénomène de la rotation des contraintes.
Figure 8 : Contraintes au passage d’une roue (tiré de Lekarp et coll., 2000)
2.8.2 Effet de la densité
Les normes pour réaliser cet essai de densité en laboratoire sont : AASHTO T99 (Proctor Standard), T180 (Proctor Modifié), ASTM D698 (Proctor Standard) et D1557 (Proctor Modifié). Les échantillons sont compactés, à l’aide d’un marteau, à une énergie normalisée en différentes couches dans un moule. La densité du compactage dépend du nombre de couches, du poids du marteau, de la hauteur de baisse et du nombre de coups.
Les résultats des recherches de Barksdale et Itani (1989) ont démontré que le MR augmente
significativement avec une augmentation de la densité à faibles contraintes. Par contre, à fortes contraintes, cet effet est beaucoup moins prononcé.
Selon la figure 9, il est possible de visualiser le rôle important joué par l’eau à l’intérieur de la structure d’une chaussée et dans la relation entre le MR et la densité sèche. Ainsi, si
l’augmentation de l’eau est faible, le MR et la densité sèche augmentent. Par contre, une
teneur en eau élevée a pour effet que le MR et la densité sèche tendent à diminuer.
Figure 9: Influence de la densité sèche sur le MR (d’après Li et Selig, 1994)
2.8.3 Effet de la granulométrie
Deux systèmes de classification des sols sont utilisés dans la pratique courante du génie civil : le système unifié de classification des sols (USCS) et le système de l’American
Association of State Highway and Transportation Officials (AASHTO). Le système de
classification des sols a pour principe de classer les sols à grains grossiers suivant leur granulométrie et les sols à grains fins suivant leur comportement plastique (Holtz et coll, 1991). La granulométrie ou la distribution de particules dans un sol est une caractéristique descriptive et essentielle. Elle est mesurée en laboratoire au moyen de deux essais (AASHTO T 88, ASTM D 422) : une analyse de tamisage mécanique pour le sable et la fraction plus grossière et un essai d’hydromètre pour l’argile. Dans cette étude, nous traitons seulement les sols à grains grossiers.
Figure 10: Valeurs de MR vs agrégats à différentes gradations (Tian et coll., 1998)
Tian et coll. (1998) ont réalisé une étude comparative entre le MR et les valeurs de trois
différentes gradations spécifiques pour les sols d’Oklahoma. La figure 10 démontre que les valeurs MR ont une tendance à augmenter avec la contrainte totale. L’augmentation du MR
est plus forte pour une gradation grossière que pour une plus fine, ces variations se situant entre 41 % et 129 %.
2.8.4 Effet de la teneur en eau
La teneur en eau d’un matériau granulaire a une influence significative sur sa résistance et sur son comportement mécanique. Les recherches effectuées ont montré que la rigidité du matériau dépend de son degré de saturation et qu’elle atteint sa valeur maximale si la teneur en eau est égale à l’Optimum Proctor. Un fort degré de saturation et une faible perméabilité produisent une augmentation de la pression interstitielle et engendrent une diminution de la rigidité du matériau ou du MR. Khoury et Zaman (2004) ont étudié la relation du module
réversible et de la teneur en eau pour les sols d’Oklahoma. Ils ont entrepris une série d’essais où les échantillons ont été compactés à une teneur en eau de -4 %, et après avoir été mouillés à +4 %, ils ont trouvé une diminution d’environ 60 % du MR. Dans un second
temps, les échantillons ont été compactés à une teneur en eau de +4 % et ensuite séchés pour atteindre une teneur en eau de -4 %. Les résultats ont montré une augmentation du MR
d'environ 400 % (figure 11).
De plus, Wolfe et Butalia (2004) ont observé une diminution du MR de près de 70 MPA
entre un sol à l’état saturé et un sol à l’état sec. La figure 12 présente la mesure typique du MR d'un sol d’infrastructure argileux avec une teneur en eau différente en fonction des
conditions de saturation.
Figure 12: MR vs degré de saturation (tiré de Wolfe et Butalia, 2004)
2.9 Façons d’évaluer le module réversible
L’évaluation du MR, au MTQ, se réalise dans une cellule à chargement cyclique. Le
principe de cette méthode d’essai consiste à appliquer sur une éprouvette cylindrique (150 mm de diamètre et 300 mm de hauteur) une contrainte de confinement ζ3 et une contrainte
déviatorique répétée ζd ; ensuite, les déformations axiale (ε1) et radiale (ε3r) réversibles sont
mesurées. L’essai triaxial en laboratoire permet de représenter très fidèlement l’état de contrainte et les conditions de sollicitation des matériaux routiers.
Dans l’étude du comportement des matériaux de chaussées, nous avons utilisé l’essai pressiométrique à cause de ses avantages.
2.10 Origine et développement de l’essai pressiométrique
Les premiers essais d’expansion cylindrique dans les sols ont été effectués en Allemagne par Kögler, en 1934, dans le but de mesurer un module de déformation du sol. En raison de la technologie de l’époque, l’appareil n’était pas opérationnel. De plus, l’inventeur n’a pas su interpréter correctement les résultats et l’appareil a été immédiatement abandonné.
En 1956, un jeune ingénieur français, Louis Ménard, a repris la technique d’essai de Kögler en adjoignant des cellules de garde à la sonde de mesure, créant ainsi le pressiomètre. Il a ajouté deux cellules de garde à la cellule de mesure centrale, évitant l’expansion de celle-ci vers le forage et la rendant ainsi interprétable. L’appareil est devenu rapidement opérationnel en raison du progrès de la technologie : cellules constituées de caoutchouc admettant de grandes déformations et surtout invention de tubulures de plastique semi-rigides rendant possible la réalisation d’essais en profondeur. Mais l’apport de Louis Ménard a surtout consisté à définir les caractéristiques des sols et à mettre au point des règles d’interprétation pour le dimensionnement des fondations en utilisant ces paramètres.
Il y a cependant un domaine d’utilisation de l’essai d’expansion cylindrique qui n’a reçu jusqu’à maintenant que peu de développement. Il s’agit de la détermination des propriétés élémentaires des sols. Les difficultés sont de deux ordres :
sur le plan théorique, l’interprétation de l’essai est complexe, comme l’ont montré les travaux de Bishop, Hill et Mott, et plus récemment les études de Ladanyi, Salençon et Vésic (1977), de Ladanyi, B. and Foriero, A. (1998), et Silvestri, V. (2001) ;
sur le plan pratique, le sol au contact de la sonde se trouve remanié par les mises en place traditionnelles : forage préalable ou refoulement.
Ces limitations ont conduit à la conception d’un nouvel appareillage : le pressiomètre autoforeur.
De nos jours, l’essai pressiométrique est utilisé par plusieurs entreprises dans le monde, surtout en France, pour définir le module réversible, calculer les pressions de rupture des fondations superficielles et déterminer les tassements.
Le principe de l’essai (figure 13) consiste :
- à dilater radialement dans le sol une sonde cylindrique en appliquant progressivement une pression uniforme sur la paroi du forage ;
- à mesurer l’expansion de la sonde en fonction de la pression appliquée ; et
- à déterminer la relation entre la pression sur le sol et le déplacement de la paroi de la sonde.
Figure 13: Principe de l’essai pressiométrique (Phuong Thao Nguyen Pham, 2008)
Avant d’effectuer un essai, il faut étalonner la sonde. L’étalonnage à l’air libre a pour objectif de déterminer la résistance propre de la membrane de la sonde (figure 14a). L’étalonnage dans un tube rigide est nécessaire afin de déterminer la perte de volume injecté due à la dilatation des tubulures et aux connections (figure 14b).
Figure 14 (a) et (b) : Correction de la membrane et du volume (Phuong, 2008) La pression et le volume corrigés sont déterminés avec
Vcorrigée = Vlue – (a.p), où
γeau =poids volumique de l’eau injecté, égalà 10 kN/m3,
h = hauteur entre la sonde et le CPV,
f (V lue) = pression corrigée, déterminée par l’étalonnage de la sonde à l’air libre,
a = coefficient de compressibilité, déterminé par l’étalonnage dans un tube rigide.
La courbe corrigée (figure 15) est constituée d’une succession de segments de pente mi , mE
est la valeur mi la plus faible, dont les limites sont les points (mE, pE, et VE’, pE’).
Cette courbe se divise en trois phases principales :
Phase I = phase de mise en contact de la paroi de la sonde avec le sol ; Phase II = phase pseudo-élastique ;
Phase III = phase de grands déplacements.
La phase pseudo-élastique est la courbe pressiométrique dont l’ensemble des segments consécutifs ont une pente inférieure ou égale à β fois la pente mE, avec
β = 1+ δp x + , où (équation 4)
δp = erreur sur la mesure de pression, égale à 1/100,
δV = erreur sur la mesure du volume de liquide injecté : 3 cm3.
Le module pressiométrique Ménard EM est déterminé dans la plage pseudo-élastique, en
considérant le sol en élasticité linéaire, en déformation plane avec
. (équation 5) Un module pressiométrique GM est également déduit de EM , soit
, où (équation 6) Vs est le volume de la cellule de l’ordre de 535 cm3.
3 PROGRAMME EXPÉRIMENTAL
3.1 Origines et sources des matériaux
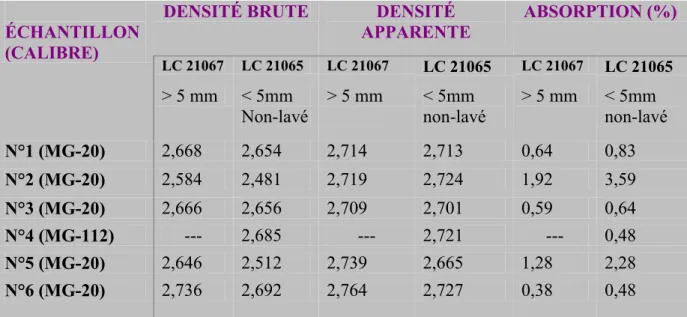
Les essais ont été réalisés sur des matériaux granulaires de type MG-20 de sol de chaussée, les échantillons provenant de six sites et couvrant une gamme étendue de sols représentatifs du contexte géologique québécois, comme l’indique le tableau 1. Trois sources sont des matériaux concassés (particules anguleuses et surfaces rugueuses) et trois autres sont des graviers naturels (particules arrondies et surface lisse). La compilation des résultats des essais de base pour chaque source est indiquée au tableau 2. Le tableau 3 présente la granulométrie de chacun des matériaux utilisés. Le tableau 4 montre que la courbe granulométrique d’un des six matériaux est hors de la limite du fuseau granulométrique de spécification du MTQ.
ÉCHANTILLON (CALIBRE) PROVENANCE (MUNICIPALITÉ)
N° 1 : 433397 (MG-20, pierre concassée)
Pavage Laurentien (Rimouski)
N°2 : 434852 (MG-112, gravier naturel)
Lafarge Canada (St-Gabriel-de-Brandon) N°3 : 433398 (MG-20, gravier naturel)
B. Jacques Dumont (Notre-Dame-du-Lac)
N°4 : 434853 (MG-20, pierre concassée)
Demix Laval (Laval) N°5 : 434851 (MG-20, gravier naturel)
Lafarge Canada (St-Gabriel-de-Brandon)
N°6 :434854 (MG-20, pierre concassée)
Sable L.G. (St-Hippolyte)
ÉCHANTILLON (CALIBRE)
DENSITÉ BRUTE DENSITÉ
APPARENTE ABSORPTION (%) LC 21067 LC 21065 LC 21067 LC 21065 LC 21067 LC 21065 > 5 mm < 5mm Non-lavé > 5 mm < 5mm non-lavé > 5 mm < 5mm non-lavé N°1 (MG-20) 2,668 2,654 2,714 2,713 0,64 0,83 N°2 (MG-20) 2,584 2,481 2,719 2,724 1,92 3,59 N°3 (MG-20) 2,666 2,656 2,709 2,701 0,59 0,64 N°4 (MG-112) --- 2,685 --- 2,721 --- 0,48 N°5 (MG-20) 2,646 2,512 2,739 2,665 1,28 2,28 N°6 (MG-20) 2,736 2,692 2,764 2,727 0,38 0,48
Tableau 2: Densité et absorption (%)
Granulométrie, % passant Tamis (mm) N°1 (MG-20) (MG-20) N°2 (MG-20) N°3 (MG-112) N°4 (MG-20) N°5 (MG-20) N°6 56 --- --- --- --- --- --- 40 --- --- --- --- --- --- 31,5 100 100 100 --- 100 100 28 --- --- --- --- --- --- 20 83 99 87 --- 94 91 14 60 93 65 --- 81 69 10 44 82 50 100 66 51 6,3 --- 66 37 98 50 38 5 21 57 33 96 44 34 2,5 12 39 24 87 30 26 1,25 8 22 19 75 19 20 0,63 6 12 15 53 13 15 0,315 5 8 12 25 9 11 0,16 4 6 8 8 7 8 0,08 2,9 4,8 4,6 1,8 5,2 5,1 0 0 0 0 0 0 0
Tableau 4: Courbes granulométriques
3.2 Description des essais triaxiaux et paramètres visés
En ce qui concerne la mesure directe, cette étude tient compte, pour la détermination du MR
en laboratoire, de la procédure LC-22-400 du ministère des Transports du Québec, selon laquelle ont été réalisés les essais de la base de données.
En 2004, le ministère des Transports du Québec a développé une méthode d’essai pour la caractérisation du MR des matériaux granulaires et, en 2007, une nouvelle version l’a
remplacée. Cette méthode d’essai permet de prendre en compte l’effet de la teneur en eau. Elle est basée sur la norme américaine AASHTO T307-99 « Standard Test Method for
Determining the Resilient Modulus of Soils and Aggregate Materials » et sur la norme européenne NF EN 13286-7 « Mélanges avec et sans liant hydraulique – Méthodes d’essai triaxial sous charge cyclique pour mélanges sans liant hydraulique ».
Un échantillon de matériau granulaire est compacté à l’aide d’un marteau vibrant. L’échantillon est conditionné et le module réversible est déterminé à l’aide d’un équipement triaxial à chargement déviatorique répété, comme le montre la figure 16.
Figure 16: Équipements utilisés pour la détermination du comportement mécanique des matériaux granulaires
La contrainte de confinement ζ3 est appliquée de manière statique alors que la contrainte
déviatorique ζd l’est de manière répétée selon une forme de chargement « haversine »,
comme le montre la figure 17.
La déformation axiale réversible est mesurée à l’aide de deux capteurs de déplacement axiaux installés sur l’échantillon et la déformation radiale réversible est mesurée à l’aide d’un capteur de déplacement radial ceinturant l’échantillon (voir figure 18).
Figure 18: Installation des capteurs de déplacement et du capteur de succion matricielle (Source : Félix Doucet, 2007)
Le module réversible est déterminé à différents états de contrainte et de teneurs en eau afin de modéliser la relation non linéaire du module réversible en fonction de l’état de contrainte et d’évaluer l’influence du degré de saturation.
Cet équipement n’est utilisé que pour la méthode de chargement radial constant. Le capteur de force est placé à l’intérieur de la cellule triaxiale en contact direct avec l’embase supérieure de l’éprouvette. Les capteurs de déformations linéaires sont de type LVDT. La sensibilité de ces capteurs permet de mesurer les déformations plus petites que 0,001 %.
Les résultats sont enregistrés à 0,02 seconde d’intervalle grâce à l’acquisition automatique des données.
3.3 Préparation de l’échantillon
Une masse de 13 kg de matériau granulaire écrêté au tamis de 31,5 mm est reconstituée sur la portion retenue sur le tamis 5 mm ; elle est humidifiée à une teneur en eau initiale de 2 % supérieure à l’absorption des granulats. Le matériau est déposé dans un contenant étanche au moins 16 heures avant le compactage de l’échantillon.
3.4 Compactage de l’échantillon
Un échantillon de matériau granulaire de 150 mm (+ ou - 1 mm) de diamètre sur 300 mm (+ ou - 10 mm) de hauteur est compacté en sept couches uniformes à l’aide d’un marteau vibrant, dans le moule en acier inoxydable, sur le plateau de chargement inférieur recouvert d’un géotextile non tissé et de deux papiers filtres. Chaque couche est vibrée pendant 30 secondes. L’échantillon compacté est pesé avec le moule, le plateau de chargement, le géotextile et les papiers filtres ; il faut en soustraire la masse pour connaître la masse humide de l’échantillon. La teneur initiale en eau de l’échantillon est déterminée à partir du matériau humidifié qui n’a pas été utilisé pour le compactage.
3.5 Démoulage de l’échantillon
L’échantillon doit être démoulé, sans être endommagé, en séparant le moule en deux parties. Le plateau de chargement supérieur est installé au sommet de l’échantillon sur deux papiers filtres humides et un géotextile non tissé. Le centre des plateaux de chargement doit être aligné sur l’axe de chargement et l’échantillon. L’échantillon est recouvert de deux
membranes, la première de 0,6 mm d’épaisseur et la deuxième de 0,3 mm d’épaisseur, fixées aux plateaux de chargement avec de la graisse de silicone et des joints toriques.
3.6 Mesurage de l’échantillon
La hauteur de l’échantillon est mesurée en quatre points à 900, y compris les plateaux de
chargement, les géotextiles et les papiers filtres ; il faut en soustraire l’épaisseur. L’épaisseur des géotextiles a tendance à diminuer sous le poids des plateaux de chargement et de l’échantillon. L’écart entre les hauteurs ne devrait pas dépasser 0,5 mm afin de s’assurer du parallélisme des faces inférieure et supérieure de l’échantillon. Le diamètre de l’échantillon est mesuré en trois points, à 75, 150 et 225 mm, avec les membranes, dont il faut soustraire deux fois l’épaisseur. L’épaisseur des membranes étirées est généralement inférieure à celle prescrite par le fabricant. L’écart entre les diamètres ne devrait pas dépasser 0,5 mm.
3.7 Installation des capteurs de déplacement
Un capteur de déplacement radial est installé sur un câble ceinturant le centre de l’échantillon. Le câble est glissé à l’intérieur de plusieurs points d’appui uniformément répartis autour de l’échantillon et il est maintenu sous tension par des élastiques. Les points d’appui doivent avoir une surface tout juste suffisante pour ne pas poinçonner l’échantillon. Deux capteurs de déplacement axiaux sont installés à 1800, sur les 200 mm centraux de l’échantillon, à l’aide de supports légers. Les supports sont en deux sections demi-circulaires maintenues appuyées sur l’échantillon par des élastiques.
3.8 Installation de la chambre de confinement
L’intérieur des plateaux de chargement est relié à des circuits de drainage indépendants. L’échantillon est recouvert d’une chambre de confinement étanche qui est placée sous la presse hydraulique, alignée sur l’axe de chargement. L’étanchéité de l’échantillon est vérifiée en appliquant une pression de confinement de 20 kPa et en s’assurant qu’il n’y a pas d’infiltration d’air dans l’échantillon. Pour ce faire, les tuyaux de drainage sont plongés dans un récipient d’eau et si des bulles d’air sont détectées, l’étanchéité des membranes doit être corrigée.
3.9 Caractéristiques de l’échantillon
La masse volumique humide (ρ), la masse volumique sèche (ρd), l’indice des vides (e) et le
degré de saturation (Sr) sont déterminés avec les équations suivantes :
ρ = 4 M / π d2 h, (équation 7)
ρd = ρ / (1 + ω), (équation 8)
e = (Gs ρw / ρd ) – 1, et (équation 9)
Sr = ((ω – Abs) Gs ) / e, où (équation 10)
ρ = masse volumique humide de l’échantillon (kg / m3),
ρd = masse volumique sèche de l’échantillon (kg / m3),
ρw = masse volumique humide de l’eau (1000 kg / m3),
Sr = degré de saturation de l’échantillon (%), ω = teneur en eau de l’échantillon (%), Abs = absorption des granulats (%), e = indice des vides de l’échantillon, Gs = densité brute des granulats, d = diamètre de l’échantillon (m), h = hauteur de l’échantillon (m), et
3.10 Mode opératoire de l’essai triaxial
L’échantillon est conditionné par 10 000 cycles de chargement et le Er de l’échantillon est
déterminé à 15 états de contrainte à l’aide d’un équipement triaxial à chargement répété asservi. La ζ3 est appliquée de manière statique, alors que 10 % de ζd l’est de manière
statique (ζdo) et 90 % de manière répétée (ζdr), selon une forme de chargement
« haversine ».
Le MR de l’échantillon est déterminé à trois teneurs en eau distinctes : teneur en eau initiale
de compactage, teneur en eau proche de la saturation et teneur en eau obtenue après le drainage gravitaire de l’échantillon. Le drainage dans l’échantillon est ouvert pendant les essais.
3.10.1 Conditionnement de l’échantillon
Le conditionnement se fait selon la méthode LC 22-400 du MTQ. L’échantillon est conditionné par 10 000 cycles de chargement, avec un ζ3 de 105 kPa et un ζd de 105 kPa.
Le temps de chargement est de 0,1 sec, suivi d’un temps de repos de 0,9 sec. Les variations des déformations permanentes et réversibles doivent être inférieures à 5 με par cycle à la fin du conditionnement pour déterminer le MR ; sinon, le conditionnement doit se poursuivre
pour 10 000 cycles additionnels. Si les déformations permanentes et réversibles ne sont pas stables après le deuxième conditionnement, l’essai ne peut pas être effectué. La cellule triaxiale est pesée avant et après le conditionnement afin de s’assurer que la teneur en eau est constante.
3.10.2 Caractérisation du module réversible
L’échantillon est d’abord caractérisé à l’état initial (teneur en eau initiale), puis à l’état saturé (échantillon saturé) et enfin à l’état drainé (échantillon complètement drainé). La teneur en eau initiale correspond à l’absorption de 2 %.
3.10.3 Caractérisation à la teneur en eau initiale
Le MR de l’échantillon est déterminé à la teneur en eau initiale aux 15 états de contrainte.
Le temps de chargement est de 1 seconde, suivi d’un temps de repos de 1 seconde et chaque ζd est appliqué pour 60 cycles. La cellule triaxiale est pesée après la caractérisation du MR
afin de s’assurer que la teneur en eau est constante.
3.10.4 Caractérisation à la teneur en eau saturée
L’échantillon est saturé par le plateau de chargement inférieur et l’air est évacué par le plateau de chargement supérieur. La cellule triaxiale est installée sur une balance et une pression de confinement de 20 kPa est appliquée en tout temps. Un capteur de pression interstitielle est branché au plateau de chargement inférieur (voir figure 18).
Les étapes suivantes sont effectuées pour saturer l’échantillon :
- une pression interstitielle négative d’environ – 50 kPa est appliquée par le plateau supérieur en fermant l’entrée d’eau par le plateau inférieur ;
- une pression d’eau de 10 kPa est appliquée au plateau inférieur et l’ouverture est ajustée de manière à saturer l’échantillon à un taux de 10 g/min, mesuré à l’aide de la balance, tout en conservant une pression interstitielle négative de – 50 kPa par le plateau supérieur ;
- lorsque l’eau commence à s’écouler par le plateau supérieur, la sortie d’eau est fermée et la saturation est poursuivie à 10g/min jusqu’à ce que la pression interstitielle devienne positive ;
- la sortie d’eau par le plateau supérieur est ouverte lorsque la pression devient positive et que les bulles d’air sont évacuées ;
- lorsque l’écoulement des bulles d’air est terminé, le plateau inférieur est fermé et une pression de confinement de 150 kPa est appliquée pour évacuer l’eau du plateau supérieur ;
- le plateau inférieur est branché à un récipient dont le niveau d’eau est égal au centre de l’échantillon ; les deux plateaux de chargement sont ouverts et le niveau d’eau dans l’échantillon est laissé équilibré pendant une heure.
Pour effectuer l’essai, le plateau de chargement et le drainage supérieur doivent être exempts d’eau et le plateau de chargement et le drainage inférieur doivent être exempts d’air. Le MR est déterminé selon la méthode employée pour la caractérisation à la teneur en
eau initiale décrite à 2.10.3. La cellule triaxiale est pesée avant et après la saturation ainsi qu’après la caractérisation du MR. La teneur en eau avant la caractérisation du MR est
considérée comme la teneur en eau saturée (ωsat) telle qu’elle est déterminée avec
l’équation suivante :
ωsat = ωi + 100 (Δmw / ρd V), où (équation 11) ωsat = teneur en eau saturée de l’échantillon (%),
ωi = teneur en eau initiale de l’échantillon (%), Δmw = masse d’eau ajoutée à l’échantillon (kg), et V = volume de l’échantillon (m3).
3.10.5 Caractérisation à la teneur en eau drainée
L’échantillon est drainé, par gravité, par le plateau de chargement inférieur et l’air est amené par le plateau de chargement supérieur. Lorsque le drainage est terminé, les plateaux de chargement et les tuyaux de drainage doivent être exempts d’eau.
Le MR est déterminé selon la méthode employée pour la caractérisation à la teneur en eau
initiale, décrite à 2.10.3.
La cellule triaxiale est pesée après le drainage et après la caractérisation du MR. La teneur
en eau avant la caractérisation de Er est considérée comme la teneur en eau drainée ωdr,
telle qu’elle est déterminée avec l’équation ci-dessous.
ω dr = ωsat + 100 (Δmw / ρd V). (équation 12)
3.10.6 Démontage de l’échantillon
La hauteur finale de l’échantillon est mesurée en quatre points à 900, y compris les plateaux de chargement, les géotextiles et les papiers filtres, dont il faut soustraire l’épaisseur. Le diamètre final de l’échantillon est mesuré en trois points, à 75, 150 et 225 mm, avec les membranes ; il faut en soustraire deux fois l’épaisseur. La hauteur finale et le diamètre final de l’échantillon ne devraient pas varier de plus de 0,5 mm des mesures initiales.
La teneur en eau de l’échantillon complet doit être déterminée afin de confirmer les teneurs en eau qui sont définies à partir de la masse de l’équipement triaxial pendant la saturation et le drainage de l’échantillon.
3.11 Calcul et expression des résultats
3.11.1 Détermination du M
Ret du V
rLe module réversible est le rapport entre ζdr et ε1r, tel qu’il est présenté à l’équation 13, et le
Vr est le rapport entre ε3r et ε1r, tel qu’il est présenté à l’équation 14. Le calcul de ζd, ε1r et
ε3r est effectué au moyen des équations 15, 16 et 17. Les paramètres utilisés pour le calcul
MR = (σdr) / (ε1r), (équation 13)
Vr = - (ε3r / ε1r), où (équation 14)
MR = module réversible (kPa),
Vr = coefficient de Poisson réversible,
ζdr = contrainte déviatorique répétée (kPa),
ε1r = déformation axiale réversible (m/m) et
ε3r = déformation radiale réversible (m/m).
Figure 19: Charge déviatorique répétée appliquée et déplacements réversibles (axial et radial)
σd = (4 Pd) / (π d2), (équation 15) ε1r = Δh / h, (équation 16) ε3r = Δc / π d (équation17)
Où Pd = charge axiale déviatorique (kN),
d = diamètre de l’échantillon (m), Δh = déplacement axial réversible (m),
h = hauteur pour la mesure de Δh (200 mm) (m), et Δc = variation de circonférence réversible (m).
3.12 Modélisation non linéaire de M
Ret V
rLe comportement non linéaire du MR est modélisé en fonction de la contrainte totale θ et de
la contrainte de cisaillement octahédrique ηoct, selon les modèles présentés aux équations 18
Figure 20: Module réversible en fonction de la contrainte totale
La valeur moyenne et l’écart type de Vr sont également calculés sans tenir compte de l’état
de contrainte pour chaque teneur en eau.
MR = a + bθ + cτoct , (équation 18)
MR = , où (équation 19)
MR = module réversible (MPa),
θ = contrainte totale (ζd + 3ζ3) (kPa),
τoct = contrainte de cisaillement octahédrique ((√2/3) ζd) (kPa),
pa = contrainte de normalisation (100 kPa),
a, b, c = paramètres de régression, et
3.13 Rapport d’essai triaxial
L’identification du matériau granulaire, les caractéristiques de l’échantillon, l’analyse des résultats et la modélisation des résultats sont présentées aux tableaux 5 à 10. Ce rapport a été produit pour chacune des teneurs en eau et nous a servi de référence pour l’essai pressiométrique.
3.14 Description des essais pressiométriques et paramètres visés
Le pressiomètre comprend deux parties :
le dispositif de mesure, tel qu’il est montré à la figure 21, restant à la surface du sol, composé d’un contrôleur pression-volume. Il est également constitué d’un volumètre et d’un manomètre permettant la lecture des pressions d’eau et de gaz dans le circuit ainsi que d’un tube gradué servant à mesurer la variation du volume pendant l’essai.
la sonde (figures 22 et 23), introduite dans le forage au bout d’un train de tiges, constituée d’une armature cylindrique recouverte d’une enveloppe en caoutchouc. Elle mesure 32,5 mm de diamètre. La sonde est insérée dans un trou de 33 mm de diamètre et des tests sont effectués tous les 335 mm de profondeur. Une courbe d’essai est obtenue à chaque intervalle de profondeur et un module réversible est déterminé à partir de chaque courbe d’essai.
Figure 23: Sonde introduite dans le forage préalable (déformations radiales)
Du fait que, lors de l’expansion d’une cavité cylindrique, les conditions aux limites sont contrôlées et bien définies, l’interprétation de l’essai devrait s’avérer relativement simple. Cependant, dans la plupart des théories, il est admis que la cavité peut être réalisée sans remaniement du sol au voisinage du forage. Cela ne correspond pas à la réalité, même dans le cas du pressiomètre autoforeur.
Pour minimiser les erreurs, nous avons conçu un moule inoxydable, fabriqué à l’Université Laval, destiné au compactage et aux essais verticaux ou horizontaux (figure 24).
Le dispositif est doté de trois roulements à billes sur trois arbres reliés à un moyeu central. Ce dernier est libre de rotation mais bloqué verticalement. Le guide rotatif sert à centrer verticalement le tube en acier. Le bouchon du fond, situé sur la plaque de base, est encastré.
3.15 Utilisation du moule fabriqué à l’Université Laval
3.15.1 Phase A : Compaction et prise de mesure pour l’essai radial
1) Installer les 4 pattes sur la plaque de base et serrer un écrou par patte en dessous de la plaque de base (voir ANNEXE 13 et 14)
2) Placer le bouchon A (voir ANNEXE 22) en dessous de la plaque de base et visser les 4 vis à tête angulaire fournies
3) Mettre en place les 2 bouchons de côté (voir ANNEXE 23) sur la chambre de compaction (figure 25) et visser les 8 petits boulons fournis en insérant une rondelle par boulon (4 boulons par bouchon)