QUANTIFICATION ET VISUALISATION DES
CONDITIONS AMBIANTES INTÉRIEURES
PAR THERMOGRAPHIE INFRAROUGE
Thèse
Frank Billy Djupkep Dizeu
Doctorat en génie électrique
Philosophiae Doctor (Ph.D.)
Québec, Canada
iii
Résumé
Le niveau de confort thermique est devenu un important critère à considérer durant la conception des habitations contemporaines. Dans certaines régions du monde, la ventilation naturelle ne permet pas de maintenir un environnement confortable à l'intérieur des habitations. On a recours aux systèmes de climatisation pour créer un microclimat intérieur artificiel confortable. Le microclimat intérieur est une combinaison de la température de l'air, de la vitesse de l'air, de l'humidité de l'air et de la température moyenne de rayonnement. Dans cette thèse, nous développons une instrumentation qui utilise la thermographie infrarouge pour mesurer et visualiser les paramètres du microclimat intérieur. Nous entamons nos investigations par la conception d'un capteur et procédons à la validation théorique de son modèle thermique. Ce capteur est l'élément intermédiaire qui permet de quantifier et de visualiser les paramètres du microclimat intérieur à l'aide d'une caméra infrarouge. La quantification de ces paramètres est possible après qu'un problème de transfert thermique inverse ait été résolu. La visualisation de ces paramètres est possible après que les coordonnées 3D d'un ensemble de capteurs disposés dans le champ de vision de la caméra aient été déterminées. Des outils de traitement d'images sont présentés et permettent la mesure précise de la température des capteurs et la localisation 3D de ces capteurs dans l'espace réel. Une validation expérimentale est finalement effectuée. Il en ressort que le système de mesure développé est précis, fiable, et robuste. Une caméra infrarouge et un ensemble de capteurs judicieusement disposés dans l'espace peuvent permettre de quantifier et de cartographier le microclimat intérieur.
v
Abstract
The level of thermal comfort has become an important criterion to consider during the design of contemporary buildings. In some parts of the world, natural ventilation is not adequate to maintain a comfortable indoor environment. Air conditioning systems are used in order to create a comfortable artificial indoor microclimate. The indoor microclimate is a combination of air temperature, air speed, humidity and mean radiant temperature. In this thesis, we develop a measuring system that uses infrared thermography to measure and visualize the parameters of the indoor microclimate. We begin our investigations by designing a sensor and we proceed to the theoretical validation of its thermal model. This sensor is the auxiliary element which allows the quantification and the visualization of the parameters of the indoor microclimate with an infrared camera. The quantification of these parameters is possible after that an inverse heat transfer problem has been solved. The visualization of these parameters is possible after that the 3D coordinates of a set of sensors placed in the field of view of the camera have been determined. Image processing tools are presented and allow the accurate measurement of sensors temperature and the 3D location of the sensors in real space. Finally, an experimental validation is realized. The results show that the system developed is accurate, reliable, and robust. An infrared camera and a set of sensors wisely arranged in space can be used to quantify and map the indoor microclimate.
vii
Table des matières
Résumé ... iii
Abstract ... v
Table des matières ... vii
Liste des tableaux ... ix
Liste des figures ... xi
Dédicaces ... xv
Remerciements ... xvii
Avant-propos ... xix
Introduction ... 1
Chapitre 1: Quantification des paramètres ambiants intérieurs : Instrumentation et validation théorique ... 11
1.1. Choix de conception ... 11
1.2. Modélisation ... 13
1.2.1. Modèle thermique du capteur ... 14
1.2.2. Capteur recouvert d'une couche de peinture de grande émissivité ... 17
1.2.3. Validation numérique du modèle thermique ... 17
1.2.3.1. Capteur sans couche émissive ... 18
1.2.3.2. Capteur avec couche émissive ... 19
1.3. Détermination des paramètres ambiants ... 20
1.3.1. Vitesse de l'air Vair ... 20
1.3.2. Température moyenne de rayonnement Trad ... 21
1.3.3. Température de l'air Tair ... 22
1.3.4. Estimation des paramètres ... 23
1.3.4.1. Position du problème ... 23
1.3.4.2. Unicité de la solution de notre problème d'estimation de paramètres ... 24
1.3.4.3. Algorithme des métriques variables ... 25
1.4. Expérience numérique ... 26
1.4.1. Preuve de l'unicité de la solution ... 27
1.4.2. Influence du niveau de bruit sur la robustesse de l'estimation du vecteur de paramètre Θ ... 29
1.4.3. Influence de la différence T T0− eq sur l'estimation du vecteur de paramètresΘ ... 30
1.4.4. Influence de la durée des mesures sur l'estimation du vecteur de paramètresΘ ... 31
1.4.5. Précision atteinte sur la mesure de la TMR et de la température de l'air ... 33
Chapitre 2: Mesure de la température par une caméra infrarouge, détection et localisation 3D des capteurs ... 35
2.1. Principe de la vision infrarouge ... 35
2.1.1. Pouvoir radiatif des corps ... 35
2.1.2. Mesure de la température par une caméra infrarouge ... 37
viii
2.1.4. Mesure de l'émissivité d'un corps ... 39
2.2. Détection des capteurs par transformation de Hough ... 41
2.3. Mesure sans erreurs de la température des capteurs ... 45
2.4. Coordonnées 3D des capteurs ... 46
2.4.1. Calibrage géométrique d'une caméra ... 47
2.4.2. Calibrage géométrique d'une paire de caméras stéréoscopiques ... 50
2.5. Transformation de l'espace ... 52
2.5.1. Transformation de l'espace à l'aide de l'unité pan-tilt ... 53
2.5.2. Transformation de l'espace par traitement d'image ... 55
2.5.3. Rotation et Translation d'un ensemble de points 3D ... 56
2.6. Reconstruction 3D du grillage de mesure ... 56
2.6.1. Balayage du grillage de mesure ... 57
2.6.2. Identification des points correspondants ... 57
2.6.3. Coordonnées 3D de tous les capteurs dans le repère commun ... 59
Chapitre 3: Quantification des paramètres ambiants intérieurs : Validation expérimentale ... 63
3.1. Système d'acquisition ... 64
3.1.1. Présentation générale ... 64
3.1.2. Rapport signal sur bruit de la caméra IR ... 65
3.2. Validation expérimentale du modèle théorique du capteur ... 66
3.3. Validation expérimentale de la mesure de la vitesse ... 68
3.3.1. Calibrage du capteur ... 68
3.3.2. Distribution spatiale de la vitesse de l'air ... 70
3.3.2.1. Distribution de la vitesse de l'air dans le plan médian d'un diffuseur mural ... 71
3.3.2.2. Distribution de la vitesse de l'air dans le plan médian d'un ventilateur d'air chaud ... 74
3.4. Validation expérimentale de la mesure de la température ... 76
3.4.1. Validation locale ... 76
3.4.1.1. Dispositif expérimental ... 77
3.4.1.2. Validation pour le cas de la lampe chauffante ... 78
3.4.1.3. Validation pour le cas de la surface chauffante ... 81
3.4.2. Distribution 2D de la température ... 84
3.4.2.1. Cas du diffuseur mural d'air froid ... 84
3.4.2.1.1. Stratification de l'air ambiant ... 84
3.4.2.1.2. Distribution de la température de l'air ... 86
3.4.2.2. Cas du ventilateur d'air chaud ... 88
3.5. Vitesse et température de l'air autour d'un diffuseur d'air par le plancher ... 91
3.5.1. Reconstruction 3D du grillage de mesure ... 91
3.5.2. Résultats ... 92
Conclusion générale ... 95
Bibliographie ... 101
ix
Liste des tableaux
Tableau 1: Données utilisées pour la validation numérique. ... 18 Tableau 2: Caractéristiques thermo-physiques du capteur ... 67 Tableau 3: Paramètres de l'expérience pour la validation pour le cas de la lampe chauffante.
... 78 Tableau 4: Résultats de la mesure de la TMR pour le cas de la lampe chauffante ... 81 Tableau 5: Paramètres de l'expérience pour la validation dans le cas de la surface
chauffante ... 82 Tableau 6: Résultats de la mesure de la TMR pour le cas de la surface chauffante ... 84
xi
Liste des figures
Figure 0.1: Visualisation de la température de l'air. (a) Cas d'un diffuseur vertical d'air. (b) cas d'un diffuseur de plafond (Sandberg, 2007). ... 7 Figure 1.1: Tête de mesure des paramètres ambiants. (a) La tête de mesure utilisée. (b)
Dispositif de visualisation (Pretto et al., 2009). ... 12 Figure 1.2: Le grillage de mesure ... 14 Figure 1.3: Modèle thermique du capteur. (a) Cas d'une sphère ; (b) Cas d'un disque ... 15 Figure 1.4: Géométrie utilisée pour la validation numérique du modèle thermique du
capteur. (a) : Capteur sans couche émissive. (b) : Capteur avec couche émissive ... 18 Figure 1.5: Validation numérique pour un capteur d'épaisseur1m m (R1=5mm,R2 =6mm). (a):
22
air rad
T =T = °C. (b): Tair =30°C T; rad =22°C. (c): Tair =22°C T; rad =30°C ... 18 Figure 1.6: Différence entre la température extérieure et la température intérieure pour un
capteur d'épaisseur1m m(R1=5mm,R2=6mm). (a): Tair =Trad =22°C. (b):
30 ; 22
air rad
T = °C T = °C. (c): Tair =22°C T; rad =30°C... 19
Figure 1.7: Validation numérique pour un capteur avec couche émissive
(R1=5mm,R2 =6mm,R3=6.1mm). (a): Tair =Trad =22°C. (b): Tair =30 ;°Trad =22°C. (c):
22 ; 30
air rad
T = °T = °C ... 19
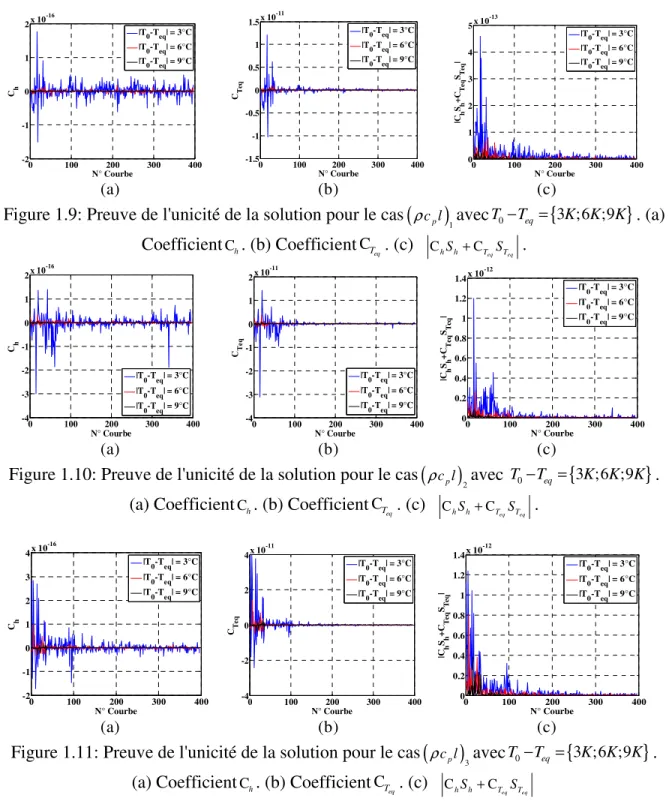
Figure 1.8: Corrélations entre le CTCC et la vitesse de l'air ... 21 Figure 1.9: Preuve de l'unicité de la solution pour le cas
(
ρc lp)
1avecT T0− eq={
3 ;6 ;9K K K}
. (a)CoefficientCh. (b) CoefficientC eq
T . (c) ChSh+CTeqSTeq . ... 28 Figure 1.10: Preuve de l'unicité de la solution pour le cas
(
)
2
p
c l
ρ avec T T0− eq=
{
3 ;6 ;9K K K}
.(a) CoefficientCh. (b) CoefficientCTeq. (c) ChSh+CTeqSTeq . ... 28
Figure 1.11: Preuve de l'unicité de la solution pour le cas
(
)
3
p
c l
ρ avecT T0− eq=
{
3 ;6 ;9K K K}
.(a) CoefficientCh. (b) CoefficientCTeq. (c) ChSh+CTeqSTeq ... 28
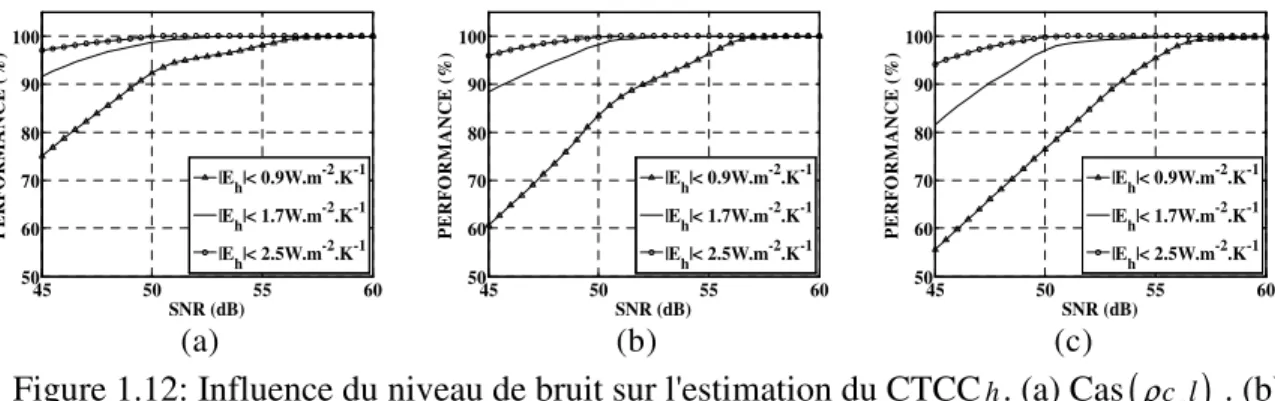
Figure 1.12: Influence du niveau de bruit sur l'estimation du CTCCh. (a) Cas
(
)
1 p c l ρ . (b) Cas
(
)
2 p c l ρ . (c) Cas(
)
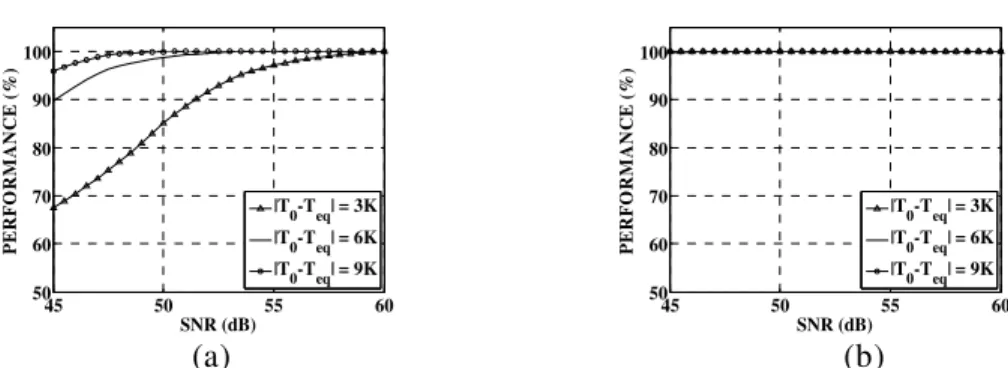
3 p c l ρ ... 29Figure 1.13: Influence du niveau de bruit sur l'estimation de la température d'équilibreTeq . 30
Figure 1.14: Influence de la différenceT T0− eqsur l'estimation du vecteur de paramètresΘ
pour le cas
(
)
1
p
c l
ρ . ... 31
Figure 1.15: Influence de la durée des mesures sur l'estimation du CTCCh. (a) Cas
(
)
1
p
c l
ρ .
(b) Cas
(
ρc lp)
2. (c) Cas(
ρc lp)
3 ... 32 Figure 1.16: influence de la durée des mesures sur l'estimation de la températured'équilibreTeq. (a) Cas
(
ρc lp)
1. (b) Cas(
ρc lp)
2. (c) Cas(
ρc lp)
3 ... 32 Figure 1.17: Précision sur la mesure de la TMR : Influence deh1et deTrad-Tair . (a)- 3
rad air
xii
Figure 1.18: Précision sur la mesure de la température de l'air : Influence deh1et deTrad-Tair .
(a)Trad-Tair =3K. (b)Trad-Tair =6K. (c) Trad-Tair =9K ... 33
Figure 2.1: Émittance du corps noir 36
Figure 2.2: Énergies reçues par la caméra IR (Ohman, 1981). ... 37
Figure 2.3: Exemple de courbe de calibrage radiométrique d'une caméra infrarouge ... 39
Figure 2.4: Caractérisation d'un cercle par transformation de Hough. (a) Cercle dans l'espace cartésien. (b) Accumulateur dans l'espace des paramètres. (c) Représentation du cercle dans l'espace des paramètres. ... 43
Figure 2.5: Caractérisation d'un cercle par transformation de Hough dynamique. (a) Cercle dans l'espace cartésien. (b) Accumulateur dans l'espace des paramètres. (c) Représentation du cercle dans l'espace des paramètres. ... 44
Figure 2.6: Détection des cercles de différents rayons dans une image RGB. (a) Image originale. (b) Contours de l'image. (c) Cercles détectés (rayon : 9, 11, 14 et 26 pixels) ... 45
Figure 2.7: Détection des capteurs dans l'image RGB. (a) Image originale. (b) Contours de l'image. (c) Capteurs détectés ... 45
Figure 2.8: Détection de capteurs dans l'image IR. (a) Image originale. (b) Contours de l'image. (c) Capteurs détectés ... 45
Figure 2.9: Choix de la distance caméra-grillage de mesure lors de la mesure de la température du capteur. (a) Cas idéal. (b) bon compromis. (c) Cas à éviter ... 46
Figure 2.10: Modèle sténopé d'une caméra. (a) Projection d'un point 3D dans le plan image. (b) Synoptique de la projection 3D-2D effectuée par une caméra. ... 47
Figure 2.11: Cible de calibrage de la caméra. (a) Image RGB. (b) Image IR ... 50
Figure 2.12: Calibrage d'une paire de caméras stéréoscopiques. (a) Projection 3D-2D. (b) Orientations spatiales des cibles de calibrage. (c) Paire d'images stéréoscopiques. .... 51
Figure 2.13: Unité pan-tilt. (a) Vue d'ensemble. (b) Rotation ''pan'' d'angleϑ . (c) rotation ''tilt'' d'angle ϕ . ... 53
Figure 2.14: Acquisition des données pour l'estimation der etp rt ... 55
Figure 2.15: Synoptique de la reconstruction 3D du grillage de mesure ... 57
Figure 2.16: Balayage progressif du grillage de mesure par la paire de caméras. ... 57
Figure 2.17: Points correspondants entre deux images. (a) correspondances initiales ; (b) correspondances après RANSAC. ... 59
Figure 2.18: Transformation rigide entre plusieurs positions de la caméra ... 60
Figure 2.19: Reconstruction 3D du grillage de mesure. (a) Ensemble des vues partielles. (b) Coordonnées 3D des capteurs ... 61
Figure 3.1: Système d'acquisition. (a) Les éléments constitutifs. (b) Rotations de l'unité ''Pan-Tilt''. (c) Balayage du grillage de mesure .64
Figure 3.2: Signaux thermiques donnés par la caméra IR durant la mesure du rapport signal sur bruit. ... 66
Figure 3.3: Caractéristiques physique du capteur. (a) Dimension. (b) Capteurs réels (avec et sans couche émissive ... 67 Figure 3.4 : Courbes expérimentales typiques. (a) Comparaison entre la température
expérimentale et la température estimée. (b) Erreur d'estimation. (c) Température du capteur pour quelques valeurs du CTCC avec Teq constante (Teq∈
[
23.55;23.92]
°C). (d)xiii Température du capteur pour quelques valeurs de la température d'équilibre pour une vitesse d'air constante (h
[
41.47 42; .60]
W m K/ 2/∈ )... 68 Figure 3.5: Dispositif de calibrage du capteur ; (a) Synoptique du dispositif expérimental.
(b) dispositif expérimental. (c) Mesure de la vitesse par l'anémomètre. ... 69 Figure 3.6: Courbe de calibrage. (a) Données expérimentales et interpolation. (b)
Comparaison avec d'autres corrélations. ... 69 Figure 3.7: Gabarits de référence en ventilation non isotherme. (a) Ventilation par le
plafond ; (b) Ventilation par le sol ... 71 Figure 3.8: Diffuseur mural d'air froid. (a) Position du diffuseur. (b) Position du grillage de mesure. ... 71 Figure 3.9: Diffuseur mural d'air froid : Distribution de la vitesse. (a) Vitesse
d'entréeVair1=1.25 /m s. (b) Vitesse d'entréeVair2 =1.95 /m s. (c) Vitesse
d'entréeVair3=2.80 /m s. ... 72
Figure 3.10: Diffuseur mural d'air froid : Essai de cartographie de la vitesse. (a) Vitesse d'entréeVair1=1.25 /m s. (b) Vitesse d'entréeVair2 =1.95 /m s. (c) Vitesse
d'entréeVair3=2.80 /m s. ... 72
Figure 3.11: Diffuseur mural d'air froid : Profil horizontal de la vitesse. (a) Hauteur de10cm. (b) Hauteur de50cm. (c) Hauteur de90cm. ... 73 Figure 3.12: Diffuseur mural d'air froid : Profil vertical de la vitesse. (a) Largeur de−25cm.
(b) Largeur de0cm. (c) Largeur de25cm. ... 73 Figure 3.13: Ventilateur d'air chaud. (a) Le ventilateur circulaire. (b) Synoptique du
dispositif de mesure. (c) Dispositif expérimental ... 74 Figure 3.14: Ventilateur d'air chaud : Distribution de la vitesse. (a) Vitesse
d'entréeVair1=0.3 /m s. (b) Vitesse d'entréeVair2=0.6 /m s. (c) Vitesse
d'entréeVair3=0.9 /m s. ... 75 Figure 3.15: Ventilateur d'air chaud : Profil horizontal de la vitesse. (a) Profondeur
de20cm. (b) Profondeur de45cm. (c) Profondeur de70cm. ... 75 Figure 3.16: Ventilateur d'air chaud : Profil vertical de la vitesse. (a) Largeur de−40cm. (b)
Largeur de0cm. (c) Largeur de40cm. ... 76 Figure 3.17: Montage expérimental pour la validation de la mesure de la température. (a)
Synoptique du montage. (b) Dispositif avec lampe chauffante. (c) Dispositif avec surface chauffante. ... 77 Figure 3.18: Erreur de mesure du CTCC et de la vitesse de l'air dans le cas de la lampe
chauffante. (a) Erreur de mesure du CTCC. (b) Erreur de mesure de la vitesse de l'air. ... 79 Figure 3.19: Erreur de mesure de la température de l'air : Cas de la lampe chauffante. ... 79 Figure 3.20: Validation de la mesure de la TMR : Cas de la lampe chauffante.
(a)h1=8.77 /W m K2/ . (b)
2 1 14.00 / /
h= W m K. (c)h1=18.74 /W m K2/ . ... 80
Figure 3.21: Erreur de mesure du CTCC et de la vitesse de l'air dans le cas de la surface chauffante. (a) Erreur de mesure du CTCC. (b) Erreur de mesure de la vitesse de l'air. ... 82 Figure 3.22: Erreur de mesure de la température de l'air : Cas de la surface chauffante.
(a)h1=8.77 /W m K2/ . (b)
2 1 14.00 / /
xiv
Figure 3.23: Validation de la mesure de la TMR : Cas de la surface chauffante. (a)h1=8.77 /W m K2/ . (b)
2 1 14.00 / /
h = W m K. (c)h1=18.74 /W m K2/ . ... 83
Figure 3.24: Stratification de l'air ambiant. (a) Distribution spatiale de la température de l'air. (b) Essai de cartographie. (c) Profils horizontaux. (d) Profils verticaux. ... 85 Figure 3.25: Diffuseur mural d'air froid : Distribution de la température de l'air. (a) Vitesse
d'entréeVair1 =1.25 /m s. (b) Vitesse d'entréeVair2 =1.95 /m s. (c) Vitesse
d'entréeVair3 =2.80 /m s. ... 86
Figure 3.26: Diffuseur mural d'air froid : Essai de cartographie de la température de l'air. 86 Figure 3.27: Diffuseur mural d'air froid : Profil horizontal de la température de l'air. (a)
Hauteur de10cm. (b) Hauteur de50cm. (c) Hauteur de90cm. ... 87 Figure 3.28: Diffuseur mural d'air froid : Profil vertical de la température de l'air. (a)
Largeur de−25cm. (b) Largeur de0cm. (c) Largeur de25cm. ... 87 Figure 3.29: Ventilateur d'air chaud : Distribution de la Température d'équilibre du capteur.
(a) Température d'entréeTair1=23°C. (b) Température d'entréeTair2 =25°C. (c)
Température d'entréeTair3 =27°C. ... 89
Figure 3.30: Ventilateur d'air chaud : Distribution de la TMR ... 89 Figure 3.31: Ventilateur d'air chaud : Distribution de la Température de l'air. (a)
Température d'entréeTair1=23°C. (b) Température d'entréeTair2 =25°C. (c) Température
d'entréeTair3 =27°C. ... 89
Figure 3.32: Ventilateur d'air chaud : Profil horizontal de la température de l'air. (a)
Hauteur de20cm. (b) Hauteur de45cm. (c) Hauteur de70cm. ... 90 Figure 3.33: Ventilateur d'air chaud : Profil vertical de la température de l'air. (a) Hauteur
de20cm. (b) Hauteur de45cm. (c) Hauteur de70cm. ... 90 Figure 3.34: Distribution de la TMR en présence d'une source circulaire de chaleur par
rayonnement. (a) Synoptique du dispositif expérimental. (b) Distribution de la TMR 90 Figure 3.35: Diffusion d'air de type plancher. (a) Diffuseur et grillage de mesure. (b)
Positions successives du grillage de mesure ... 91 Figure 3.36: Coordonnées 3D des capteurs ; (a) Résultat de la triangulation suivie de la
reconstruction dans un repère unique. (b) Projection dans le plan moyen. (c)
Coordonnées des capteurs pour les quatre positions du grillage de mesure ... 92 Figure 3.37: Paramètres à la sortie du diffuseur. (a) Vitesse de l'air. (b) Température de l'air
... 93 Figure 3.38: Distribution 3D des paramètres ambiants autour du diffuseur. (a) Vitesse de
xv
Dédicaces
À la mémoire de Monsieur DIZEU ISAACK, mon père. Parti trop tôt surement. Dignité, droiture et excellence pour repères. Protecteur des siens rigoureusement. Souffrant le martyre silencieusement. Alors que de ton état de santé je m'enquérais,
Très optimiste, tu me rassurais. M'évitant angoisse, anxiété et crainte. Mais voilà, rémanente est la douleur de ta perte. La faucheuse a fait sa funeste besogne. Aléatoire a été son choix, précis a été son instant. Profondes sont ses empreintes, Permanentes mieux qu'au printemps. En cette année 2014, Il a été rude, l'hiver. Alors que cette thèse je finalisais,
Toi, tu t'en allais. Et cette distance nous séparant… Et ce temps nous vieillissant… Impossible de voir un jour ton absence être comblée. Impossible de voir un jour ces larmes s'assécher. On s'accroche aux promesses de la vie, En s'efforçant à en comprendre le sens
Car la vie c'est… Car la vie est…
xvii
Remerciements
Né pour amener ma part de progrès, je ne peux m’empêcher de dire mes sincères remerciements à tous ceux qui de près ou de loin, en pensées comme en actions n’ont cessé de me manifester leurs sollicitudes, réservoir d’énergie pour l’aboutissement de ce dessein.
J'ai une pensée chaleureuse à ceux grâce à qui je suis là, mon feu père Dizeu Isaack et ma mère Pinji Rosaline. Je les remercie pour l'amour et l’éducation rigoureuse qu’ils ont su m’inculquer. Merci également pour leur présence et leur soutien permanent à chaque chevet de mes souffrances.
Ma gratitude va au Prof. Xavier Maldague pour la confiance qu'il m'a faite en m'accueillant au sein de la chaire MiVim du laboratoire de vision et systèmes numériques de l'université Laval. Merci de m'avoir donné la possibilité, en acceptant de diriger ce travail, de découvrir des thématiques de recherche hautement intéressantes, actuelles et de pointe. Je remercie aussi le Prof. Abdelhakim Bendada pour avoir accepté de codiriger ce travail. Ses critiques et commentaires m'ont été grandement bénéfiques. Je tiens à remercier le Prof. Sébastien Poncet du département de génie mécanique de l'université de Sherbrooke, le Prof. Louis Gosselin du département de génie mécanique de l'université Laval, et le Prof. Robert Bergevin du département de génie électrique et de génie informatique de l'université Laval pour avoir accepté de siéger au Jury d'évaluation de cette thèse.
Une pensée chaleureuse pour mes frères Cyril et Emmanuel et pour mes sœurs Foville, Kelly et Célia, ainsi que pour mon neveu Chanel. Je n'oublie évidemment pas mon épouse Delphine.
xix
Avant-propos
Le programme de doctorat à la faculté des sciences de l’Université Laval compte 90 crédits et est constitué de trois étapes essentielles. Durant la première étape, l'étudiant au doctorat fait un choix de cours, 9 crédits au total, afin de se doter d'un bagage théorique et expérimental suffisant dans les thématiques liées à son projet de recherche en gestation. Durant la seconde étape, la recherche proprement dite, le candidat au doctorat initie et poursuit un projet de recherche originale. Ce projet de recherche est initialement approuvé par la faculté après que l'étudiant l'ait défendu avec succès devant un jury constitué d'enseignants et/ou de chercheurs en des disciplines connexes. Cette seconde étape de 81 crédits permet au doctorant de rédiger sa thèse et de faire un dépôt initial auprès de la faculté. La troisième étape est la défense de la thèse. Le doctorant présente ses travaux devant un jury dument constitué.
La présente thèse a été conduite dans le cadre du projet «Québec-Italie » entre la Chaire de recherche en vision infrarouge multipolaire (MiVim) de l'Université Laval à Québec et l'Institut des Techniques de la Construction (ITC) du Conseil National de la Recherche (CNR) de la ville de Padoue en Italie. Ce projet portait sur la mesure, par thermographie infrarouge, des conditions environnementales à l'intérieur des bâtiments. Il a donc été question de développer une instrumentation qui utilise principalement une caméra infrarouge pour quantifier et cartographier les paramètres environnementaux intérieurs. L'aboutissement immédiat est la possibilité de ''voir'' les paramètres recherchés sans avoir recours à des simulations qui s'avèrent en général être assez fastidieuses. L'aboutissement futur est la possibilité d'évaluer, par une mesure directe au moyen d'une caméra infrarouge, le niveau de confort thermique ressenti par les occupants du bâtiment. Quatre articles sont issus de cette thèse. Deux articles de conférence avec comité de lecture et deux articles de revue avec arbitrage.
Article 1
Titre: A Hybrid, Infrared Thermography – Heat Diffusion Equation, Method for the 3D
xx
Auteurs: F. B. D. Djupkep, X. Maldague, A. Bendada, P. Bison, and E. Grinzato Conférence : Proceedings of SPIE - The International Society for Optical Engineering,
Thermosense XXXIII, Orlando, FL., USA.
Pages: 80130A_1-8 Année: 2011 Article 2
Titre: Room Air Movement Analysis by IR Thermography
Auteurs: F. B. D. Djupkep, X. Maldague, A. Bendada, P. Bison, and E. Grinzato
Conférence: 11th International Workshop on Advanced Infrared Technology and
Applications (AITA), L'Aquila, Italie.
Année: 2011 Article 3
Titre: Analysis of a new method of measurement and visualization of indoor conditions
by infrared thermography
Auteurs: F. B. D. Djupkep, X. Maldague, A. Bendada, and P. Bison Revue: Review of Scientific Instrument
Vol: 84
Pages: 084906_1-11 Année: 2013
Article 4
Titre: Measurement and visualization of indoor conditions by infrared thermography:
Experimental validation and mapping of parameters
Auteurs: F. B. D. Djupkep, X. Maldague, and A. Bendada Revue: Review of Scientific Instrument.
1
Introduction
Chaque année, des sommes colossales sont dépensées pour maintenir une bonne climatisation dans les habitations. Que ce soit dans les pays chauds, pour le refroidissement, ou dans les pays froids pour le chauffage, chaque famille alloue un budget non négligeable à l'achat, l'utilisation et la maintenance des systèmes de climatisation. En plus de ces considérations économiques, des considérations écologiques doivent être prises en compte par les architectes et les ingénieurs durant la conception des habitations contemporaines afin d'optimiser le rendement fourni par les systèmes de climatisation qui y sont installés. Ceci passe par un choix judicieux du type de climatisation, convectif et/ou radiatif, en fonction des caractéristiques de l'habitation (Illumination diurne, position géographique, présence des surface vitrées, matériaux constituants les murs, etc.). Le but final est évidemment celui de créer un environnement intérieur qui soit suffisamment confortable pour favoriser le bien-être et la productivité des occupants.
Le confort thermique, que les systèmes de climatisation permettent d'atteindre, est continuellement sujet d'améliorations pour au moins deux raisons. De nos jours, en moyenne 90% du temps est passé à l'intérieur d'habitations et 75% d'insatisfactions ergonomiques signalées par les occupants sont liées à l'inconfort thermique (Awbi, 1991; Martin et al., 2002). Des améliorations sont donc à faire dans le domaine du bâtiment et même dans l'industrie de l'automobile afin de minimiser les dépenses énergétiques liées à la climatisation tout en améliorant le confort thermique des occupants. Pour cela il faut faire face à deux principaux défis: un défi de conception des systèmes de climatisation et des habitations, ceci en termes de rendement et de consommation d'énergie; puis un défi de développement de méthodes d'instrumentation qui permettent l'analyse et le contrôle du confort thermique ainsi que la mesure du microclimat intérieur au moins en ce qui concerne la distribution spatiale de la température et de la vitesse de l'air. Il y'a, semble-t-il, nécessité d'explorer diverses pistes pouvant permettre une meilleure compréhension des dépendances qu'a le confort thermique vis-à-vis du microclimat intérieur, de l'ossature et de la géométrie des habitations. Une interrogation est donc celle de savoir quel est l'intérêt de mettre en
2
œuvre la thermographie infrarouge (IR) pour des questions relatives au confort thermique dans un espace clos ? L'espace clos étant entendu ici comme tout environnement humain séparé totalement de l'extérieur par un ensemble de frontières bien définies. Pour lever cette interrogation, intéressons nous aux paramètres dont dépend le confort thermique.
Pour un individu, le confort thermique est un état de satisfaction par rapport aux conditions thermiques environnantes. Une forte relation existe ainsi entre le confort thermique et le microclimat intérieur. Les indices de mesure et de prédiction du confort thermique sont décrits par la norme ISO 7730 (ISO 7730, 2005). Ils permettent de constater que le confort thermique dépend de deux types de paramètres (ASHRAE Standard 55, 2010; Höppe et Martinac, 1998): les paramètres thermiques et les paramètres personnels. Les paramètres thermiques (paramètres objectifs) sont la température de l'air, son humidité, sa vitesse et la température moyenne de rayonnement (TMR). En utilisant des instruments dédiés (thermocouple, psychromètre, anémomètre, thermomètre, etc.), il est possible de quantifier ces paramètres thermiques. On peut étendre ces paramètres thermiques aux échanges thermiques entre l'air ambiant, les sources intérieures de chaleur, l'enveloppe de l'habitation et le milieu extérieur. Les paramètres personnels regroupent le niveau d'activité (métabolisme) de l'occupant et l'isolation thermique de ses vêtements. Ces paramètres ne sont pas rigoureusement quantifiables car ils sont différents d'un individu à l'autre. Ils sont donc essentiellement subjectifs (ASHRAE, 2001). Même s'il est relativement simple de réaliser des mesures ponctuelles des paramètres thermiques au moyen d'instruments dédiés, il reste difficile, par ces instruments, de quantifier les paramètres thermiques lorsque la dimension spatiale passe à deux ou trois comme c'est le cas dans un espace clos. La température moyenne dans une habitation, à elle seule, n'est pas un indicateur du niveau de confort thermique. La proximité ou non d'une source chaleur peut grandement perturber le confort ressenti localement. Une mesure globale plutôt qu'une mesure ponctuelle s'avère ainsi utile pour percevoir l'état thermique dans son ensemble ; d'où la motivation de considérer une instrumentation s'appuyant sur une caméra thermique.
Nous portons notre intérêt sur le second défi relevé précédemment, à savoir, l'analyse et la quantification du microclimat intérieur au moins en ce qui concerne la température et la vitesse de l'air. Il a été question au cours de ce travail de tirer avantage des potentialités
3 d'une caméra thermique afin de quantifier et de cartographier le microclimat intérieur en termes de température et de vitesse de l'air. Idéalement, l'analyse et le contrôle du confort thermique par imagerie infrarouge se déclinerait en trois étapes. La première étape consisterait en la mesure des paramètres thermiques de l'espace clos, la seconde étape serait la cartographie globale de ces paramètres et finalement, la troisième étape serait la déduction de la distribution spatiale du confort thermique. Durant ce travail, nous avons rendu possible les deux premières étapes. La troisième étape et son aspect subjectif pourrait faire l'objet d'un travail ultérieur.
État de l'art
L'équation de la chaleur et les équations de Navier-Stokes permettent de décrire et de caractériser la propagation de la chaleur dans les milieux solides et dans les fluides. En particulier, pour quantifier et visualiser les conditions ambiantes à l'intérieur d'habitations, ces équations sont le point de départ de tout développement théorique. Seulement, il est difficile, voire même impossible, dans l'état actuel des connaissances en mathématiques théoriques, de fournir une solution analytique à certains problèmes relevant du transfert thermique et de la dynamique des fluides. Face à ce blocage analytique, en général, on a recours aux simulations numériques qui ont l'avantage de pouvoir fournir une solution rigoureuse même à des problèmes complexes et sont ainsi un moyen direct de visualisation des solutions 1D, 2D et 3D obtenues. Cependant, les simulateurs numériques fournissent une solution seulement lorsque la géométrie de ≪l'objet≫ étudié, les conditions aux
frontières, et les conditions initiales sont clairement établies et fournies. De plus, la convergence de la solution, le temps de calcul, ainsi que les ressources matérielles, font que l'obtention d'une solution numérique juste peut parfois s'avérer fastidieuse. La validation d'un modèle de simulation pour un problème donné nécessite une confrontation aux données expérimentales.
Cette nécessité de disposer de données expérimentales a mené au développement de plusieurs techniques de mesure et de visualisation des caractéristiques thermiques et cinétiques des fluides en général, de l'air en particulier, spécifiquement à l'intérieur d'habitations. La technique de mesure peut être soit ponctuelle (thermocouple, thermomètre, anémomètre, etc.) et fournir une mesure correspondant à la position du
4
capteur utilisé, ou alors, elle peut être globale (Vélocimétrie par image de particules, thermographie infrarouge, etc.), et fournir la mesure dans un plan ou dans l'espace.
Mesure ponctuelle de la température
La mesure de la température en un point est possible au moyen, entre autres, d'un thermocouple ou d'une résistance thermique (Fraden, 2004). Un thermocouple est constitué par la liaison de deux conducteurs en deux jonctions respectivement de températureT1etT2.
Un effet thermoélectrique nait de l'association de ces deux conducteurs, de sorte que l'effet Peltier qui quantifie la différence de potentiel au point de jonction entre deux conducteurs ayant la même température, et l'effet Thomson qui quantifie la force électromotrice existant entre deux points de températures différentes à l'intérieur d'un conducteur, permettent de trouver la force électromotrice de Seebeck qui existe entre les deux conducteurs. Cette force électromotrice est fonction de la nature des conducteurs et des températures T1etT2
des deux jonctions. Si l'une des jonctions est maintenue à une température constante, il est possible de déterminer la température de l'autre jonction en contact avec le milieu dont on veut mesurer la température. Les thermocouples ont l'avantage de couvrir une grande plage de température (−270 C° à2700 C° ), de s'autoalimenter, d'être simples et de coût abordable.
Ils ont l'inconvénient d'être non linéaires, de faible sensibilité, d'être peu stables et de nécessiter la connaissance précise de la température de la jonction de référence.
La résistance électrique d'un conducteur électrique dépend de la température de celui-ci. C'est sur cette dépendance que se fonde le principe de fonctionnement des résistances thermiques. Un circuit de conditionnement est nécessaire pour permettre la mesure de la résistance électrique et la rendre linéaire par rapport à la température. Par comparaison aux thermocouples, les résistances thermiques couvrent une plage plus restreinte (−200 C° à 1000 C° pour les résistances thermique en platine), elles nécessitent une alimentation, elles
s'échauffent rapidement par effet Joule, et elles sont coûteuses. Elles ont cependant l'avantage d'être plus stables, linéaires, et de précision pouvant atteindre0.1 C° .
Mesure ponctuelle de la vitesse
On peut classer les anémomètres usuels en deux catégories : Les anémomètres mécaniques et les anémomètres thermiques. Les anémomètres mécaniques ont un élément,
5 généralement un rotor associé à une hélice, qui convertit l'effet cinétique du fluide en courant électrique. L'intensité du courant produit est proportionnelle à la vitesse du fluide. Les anémomètres mécaniques les plus récents mesurent les vitesses comprises entre
0.25 /m set30 /m s avec une résolution de 0.01 /m set une incertitude comprise entre
0.05 /m set0.1 /m s. La présence des hélices augmente l'envergure de ce type d'anémomètre,
ce qui peut être une source d'erreur de mesure. Par ailleurs, afin d'assurer une mesure juste, une contrainte posée par ce type d'anémomètre est qu'il est nécessaire que l'orientation des hélices par rapport à la direction de l'écoulement du fluide soit la plus appropriée possible.
Les anémomètres thermiques, pour mesurer la vitesse locale dans un fluide, déterminent la vitesse de refroidissement d'un élément chauffé par effet Joule. Cette vitesse de refroidissement, liée à l'échange de chaleur par convection, permet de trouver la vitesse du fluide (Webster, 1999). L'élément sensible de ces anémomètres est de très petite taille et nécessite un calibrage. Cet élément peut être soit un fil de très faible diamètre (anémomètre à fil chaud), soit un film mince (anémomètre à film chaud), soit une sphère (anémomètre à sphère chaude). L'élément sensible des anémomètres à fil chaud est de longueur de l'ordre du millimètre et de quelques micromètres de diamètre. Ils ont donc un faible temps de réponse mais sont trop fragiles pour être déployés dans un environnement rude. Ils présentent une incertitude comprise entre 0.02 /m set0.1 /m sdans la plage de mesure allant
de0.05 /m sà30 /m s. Les anémomètres à film chaud sont constitués d'un film conducteur très
mince de largeur proche de50 mµ . Par comparaison aux anémomètres à fil chaud, les
anémomètres à film chaud ont un grand temps de réponse, sont plus couteux, mais sont plus stables et robustes. Les anémomètres à sphère chaude ont un diamètre qui varie entre un et trois millimètres. Ils mesurent des vitesses comprises entre 0.1 /m sà5 /m set sont moins
coûteux. À cause de leur temps de réponse grand, ils mesurent la vitesse moyenne plutôt que la vitesse instantanée.
Mesure globale de la vitesse
Les techniques usuelles de visualisation de la vitesse fournissent des informations clés sur le gabarit de l'écoulement des fluides. Le mouvement du fluide est rendu visible grâce à des traceurs injectés dans celui-ci (Sun et Zhang , 2007). Une caméra RGB enregistre à grande fréquence le déplacement de ces traceurs. Par traitement d'image, il est possible de
6
déterminer la vitesse de déplacement de ceux-ci. Si ces traceurs sont judicieusement choisis, leur masse volumique est proche de celle du fluide. Leur comportement cinétique est donc identique à celui du fluide, et par conséquent leur vitesse aussi. Ces techniques reposent donc essentiellement sur le choix d'un traceur de même masse volumique que le fluide et facilement visible par une caméra RGB. Les traceurs usuels sont la fumée, des microbulles ou même des particules fluorescentes.
La vélocimétrie par image de particules (Raffel et al., 2007) est une technique qui utilise des particules fines pour visualiser et quantifier la vitesse du fluide. Dans deux images prises par une caméra à deux instants différents, on identifie le parcours moyen d'un groupe de particules, et par corrélation des deux images, on détermine la distance parcourue par ces particules. On peut alors déterminer leurs vitesses de déplacement. Le dispositif expérimental est constitué d'une source qui introduit des particules à un débit et une densité donnés, d'un système produisant de la lumière (laser, flash) servant à illuminer les particules, et d'une camera RGB de résolution pouvant atteindre 2 à 4 pixels par particule. Dans cette technique, l'instrumentation complète peut s'avérer lourde pour capturer, dans son ensemble l'état cinétique, de l'air ambiant. De plus la densité des particules dans le fluide doit être fixée judicieusement. Lorsque peu de particules sont introduites, le traitement d'image est allégé, il s'agit de la vélocimétrie par pistage de particules.
Thermographie infrarouge
La mesure des paramètres du microclimat intérieur suppose principalement la mesure de la température de l'air, de la vitesse de l'air, de son humidité relative et de la TMR. Tout espace clos est a priori thermiquement non uniforme à cause de la présence éventuelle des sources et des puits de chaleur divers et variés (Cehlin et Moshfegh, 2010). L'utilisation des instruments dédiés pour la mesure ponctuelle de ces paramètres est onéreuse et inappropriée lorsqu'il s'agit de représenter spatialement l'état thermique de l'espace clos. L'imagerie thermique peut donc être une solution avantageuse du fait qu'elle permet d'obtenir instantanément la distribution de la température sur des échelles spatiales relativement grandes.
L'utilisation d'une caméra infrarouge pour la mesure de la température a été largement abordée (Ohman, 1981; Maldague, 1992; Minkina et Dudzik, 2009). Les applications sont
7 nombreuses et incluent de façon non exhaustive, la mesure de la température des murs des bâtiments (Grinzato et al., 1998; Datcu et al., 2005), l'évaluation de l'isolation thermique de ceux-ci (Balaras et Argiriou, 2002; Lebedev et al., 2006), la localisation des défauts et des fuites thermiques (Maldague, 2001; Grinzato et al., 2002; Spring et Snell, 2007; Grinzato et al., 2010), l'évaluation du comportement thermique humain (Choi et al., 1998; Özgün et Muhsin, 2009), etc. Cependant, dans la littérature, très peu de travaux proposent une instrumentation pour la mesure des conditions ambiantes par imagerie thermique.
L'air étant transparent dans le visible et dans l'infrarouge, la mesure de sa température n'est rendu possible que par l'utilisation d'un élément auxiliaire. Il a été démontré qu'une surface homogène de faible capacité thermique et de faible épaisseur peut permettre de visualiser le gabarit de la température de l'air autour d'un diffuseur d'air dans un espace clos (Hassani et Stetz, 1994; Cehlin et al., 2000; Cehlin et al., 2002). La caméra thermique mesure la température de cette surface qui, en équilibre avec l'air, est supposée être à la même température que ce dernier. Une telle approche nécessite cependant que la surface soit rigoureusement parallèle à la direction de l'écoulement de l'air, ce qui constitue un véritable inconvénient pour des situations où les caractéristiques de l'écoulement ne sont pas connues a priori. De plus, compte tenu de l'hypothétique présence des échanges thermiques par rayonnement, l'équilibre thermique entre ladite surface et l'air ne garantit pas toujours que sa température d'équilibre soit égale à celle de l'air. La Figure 0.1 présente deux scénarios de visualisation de la température de l'air par cette approche.
(a) (b)
Figure 0.1: Visualisation de la température de l'air. (a) Cas d'un diffuseur vertical d'air. (b) cas d'un diffuseur de plafond (Sandberg, 2007).
8
introduit l'idée de se servir non pas d'une large surface plane homogène mais plutôt d'un ensemble de petites surfaces positionnées dans le champ visuel de la caméra (Bison et al., 1992; Pretto et al., 2009). Il surgit alors la nécessité de la détection automatique de ces petites surfaces dans l'image infrarouge, et leur positionnement dans l'espace. L'automatisation de la procédure est rendue complexe à cause du nombre de données à rechercher dans l'image infrarouge surtout lorsque le contraste thermique rend difficile la localisation des régions d'intérêt dans l'image. L'obtention de la vitesse de l'air dans ce cas s'effectue à partir de deux valeurs de températures (sèche et humide).
Objectifs
L'objectif global de ce travail est d'enrichir la métrologie par un système de mesure et de cartographie du microclimat intérieur (température et vitesse de l'air) qui utilise les moyens et les méthodes de la thermographie infrarouge. L'issue immédiate est de fournir un outil d'analyse expérimentale du microclimat intérieur pouvant concurrencer et/ou être complémentaire à l'analyse numérique régulièrement faite au moyen d'outils de simulation. La projection future est de pouvoir cartographier le confort thermique à l'intérieur des habitations au moyen d'une caméra infrarouge. Les objectifs spécifiques poursuivis dans ce travail se déclinent en les cinq orientations suivantes :
1- Concevoir un capteur (élément auxiliaire) qui permette la détermination des paramètres thermiques à partir de la température mesurée par une caméra thermique.
2- Développer une procédure expérimentale qui permette la détermination de la distribution spatiale des paramètres thermiques ambiants.
3- Présenter des outils d'analyse et de traitement d'image en vue de la localisation 3D des capteurs et de leur détection rigoureuse dans les images infrarouges.
4- Valider expérimentalement le système de mesure.
5- Cartographier le microclimat intérieur, au moins en ce qui concerne la température et la vitesse de l'air, au moyen d'une caméra thermique.
9
Plan de la thèse
Cette thèse est constituée de trois chapitres dont le contenu est directement lié à l'atteinte de l'un ou l'autre des cinq objectifs visés. Dans le premier chapitre, nous présentons l'étape de conception et de validation théorique d'un modèle décrivant le comportement thermique du capteur, et permettant la mesure de la température et de la vitesse de l'air par une caméra thermique. Nous dressons aussi l'ébauche d'un protocole expérimental qui puisse permettre de produire la distribution spatiale de la température et la vitesse de l'air. Le premier objectif est complètement atteint dans ce premier chapitre, tandis que le second l'est partiellement.
Nous introduisons le second chapitre par la présentation du principe de la vision thermique et des paramètres radiométriques qui interviennent. Nous présentons ensuite les algorithmes et les méthodes d'analyse et de traitement d'images mis en œuvre pour la détection et la localisation 3D des capteurs en vue de la reconstruction 3D des conditions ambiantes intérieures. Dans ce chapitre, le second objectif est complété, le troisième objectif est complètement atteint et le cinquième objectif est entamé.
Finalement, le troisième chapitre présente quelques expériences qui permettent de valider expérimentalement le système de mesure dans son ensemble, puis de cartographier la température et la vitesse de l'air dans un espace clos soumis à un système de climatisation par convection. Par ce chapitre, nous complétons le cinquième objectif et le quatrième objectif est complètement atteint.
11
Chapitre 1: Quantification des paramètres ambiants
intérieurs : Instrumentation et validation théorique
D'un point de vue métrologique, une caméra IR, en plus de mesurer la température, permet aussi de visualiser la distribution spatiale de celle-ci. Cependant, le principe de fonctionnement d'une caméra IR, nous le présenterons au chapitre 2, montre que l'objet dont on mesure la température à l'aide d'une caméra IR doit d'être relativement opaque. Lorsque comme l'air, l'objet est transparent, il est nécessaire de se doter d'un dispositif/élément intermédiaire pour assurer la mesure de la température par la caméra IR. Les propriétés de cet élément intermédiaire ainsi que la procédure de mesure doivent être proposées et validées, d'abord théoriquement et ensuite expérimentalement. Dans ce chapitre nous présentons la conception et la validation théorique de notre élément intermédiaire de mesure des paramètres ambiants par thermographie infrarouge.
1.1. Choix de conception
En général, le nombre de paramètres à mesurer est égal au nombre d'instruments de mesure utilisés. Quatre paramètres nous intéressent, la température de l'air, la vitesse moyenne de l'air, l'humidité de l'air et la température moyenne de rayonnement. Deux approches de conception peuvent être envisagées selon que l'on veuille utiliser un capteur par paramètre à mesurer ou un capteur pour la mesure simultanée de plusieurs paramètres. En adoptant la seconde approche quelques auteurs ont conçu une tête de mesure incluant un capteur pour la température de l'air, un capteur pour la vitesse de l'air et un capteur pour la TMR (Pezzoti et Coppa, 2008). La dépendance de la résistance électrique d'un fil métallique avec la température permet de déterminer la température de l'air ; la vitesse de refroidissement de ce fil permet de déduire la vitesse de l'air, alors que la TMR est obtenue comme fonction de la différence entre la température d'une surface plane émissive et la température d'une surface plane réfléchissante. D'autres auteurs (Pretto et al., 2009) ont suggéré une approche basée sur le transfert thermique. La caméra IR mesure la température de trois compartiments distincts. Le premier compartiment est une surface plane sèche dont
12
la température, dite température sèche, est identique à la température de l'air ; le second compartiment est une surface humide fait d'un matériau hydrophile dont la température, dite température humide, permet avec la température sèche de déterminer l'humidité et la vitesse de l'air ; le troisième compartiment est une surface plane opaque et de faible émissivité qui permet de déterminer la TMR. La Figure 1.1a présente la tête de mesure utilisée dans ce cas. Le dispositif expérimental pour la visualisation des paramètres est présenté par la Figure 1.1b.
(a) (b)
Figure 1.1: Tête de mesure des paramètres ambiants. (a) La tête de mesure utilisée. (b) Dispositif de visualisation (Pretto et al., 2009).
Dans ces différentes méthodes de mesure, la tête de mesure est de taille relativement grande (autour de 5cm d'envergure). Lorsqu'il est question de cartographier l'environnement intérieur, la taille du capteur doit être prise en compte durant l'étape de conception, ceci afin d'éviter que le capteur soit une source de perturbation majeure.
La possibilité qu'offre une caméra IR pour la mesure de la température des surfaces a été exploitée pour mesurer la distribution spatiale de la température de l'air. L'élément intermédiaire étant une large surface homogène de faible capacité thermique (Hassani et Stetz, 1994; Cehlin et al., 2000). Un tel élément intermédiaire permet de visualiser et de quantifier le gabarit de température en espace clos, par exemple autour d'un diffuseur d'air (Figure 0.1). Seulement, il doit être placé de façon strictement parallèle à la direction de l'écoulement de l'air afin d'éviter de le perturber. Il en découle que pour une cartographie complète des conditions ambiantes, un tel élément, large et homogène, est obsolète du fait qu'a priori les caractéristiques de l'écoulement sont inconnues. Une approche qui utilise un
13 ensemble de petits éléments intermédiaires pour mesurer localement les paramètres cherchés, puis qui interpole les mesures trouvées afin d'obtenir la distribution spatiale complète, serait une approche quasi-non invasive. Par ailleurs, l'hypothèse selon laquelle la température de l'élément intermédiaire est égale à celle de l'air n'est valable que lorsque les échanges de chaleur par rayonnement sont négligeables. Dans la plupart des cas, pour mesurer la température de l'air par une caméra IR grâce à un élément intermédiaire, la TMR et le coefficient de transfert de chaleur par convection (CTCC) entre cet élément et l'air doivent être connus. L'équilibre thermique d'un corps avec l'air l'environnant dépend des quantités de chaleur échangées par convection et par radiation.
Nous considérons l'approche basée sur le transfert thermique. Il semble intéressant de choisir, à cause de ces propriétés thermo-physiques, un capteur fait d'un matériau bon marché et de développer une procédure permettant l'estimation des paramètres ambiants à partir de la température de ce capteur. Cette température étant mesurée, sans contact et à distance, par une caméra IR. Durant une phase transitoire créée, nous enregistrons la variation de la température de ce capteur avec le temps. Les trois paramètres TMR, température et vitesse de l'air sont alors déterminés en résolvant un problème inverse de transfert de chaleur. Chaque capteur occupe une position donnée dans l'espace. Il est possible de faire un arrangement régulier des capteurs dans la portion d'espace où l'on veut cartographier les paramètres ambiants. Un grillage de mesure est ainsi construit. Il comporte un nombre donné de rangées contenant chacune un nombre donné de capteurs. Le grillage de mesure est placé dans le champ de vision de la caméra. Celle-ci peut, de façon simultanée, mesurer l'historique de température de chaque capteur. On peut ainsi estimer localement les paramètres ambiants recherchés et par interpolation visualiser la distribution spatiale de ceux-ci dans la portion d'espace contenant le grillage de mesure. L'étape initiale d'implémentation de cette instrumentation est la modélisation robuste du capteur.
1.2. Modélisation
En plus des propriétés thermo-physiques du capteur, ses caractéristiques géométriques, notamment sa taille et sa forme, sont à considérer. Les propriétés thermo-physiques permettent de caractériser l'équilibre thermique entre le capteur et le milieu environnant,
14
tandis que les caractéristiques géométriques assurent la détection du capteur dans les images infrarouges ainsi que l'unicité de la température renvoyée par la caméra IR quelque soit la pose. Deux formes géométriques sont envisageables pour le capteur ; une forme en disque et une forme sphérique. La forme sphérique a l'avantage que la pose du capteur vis-à-vis de la caméra n'influence pas la mesure effectuée, ceci en raison du fait que pour une sphère toutes les directions sont équivalentes. Avec un capteur de forme sphérique, on n'est pas contraint de contrôler la disposition du capteur par rapport à la direction de l'écoulement et par rapport à la caméra. Pour les deux types de géométries, le capteur doit être de taille suffisamment grande pour être identifiable dans l'image infrarouge et pour que la température renvoyée par la caméra IR soit exempte des perturbations dues à l'arrière plan, et suffisamment petite pour ne pas perturber l'écoulement de l'air.
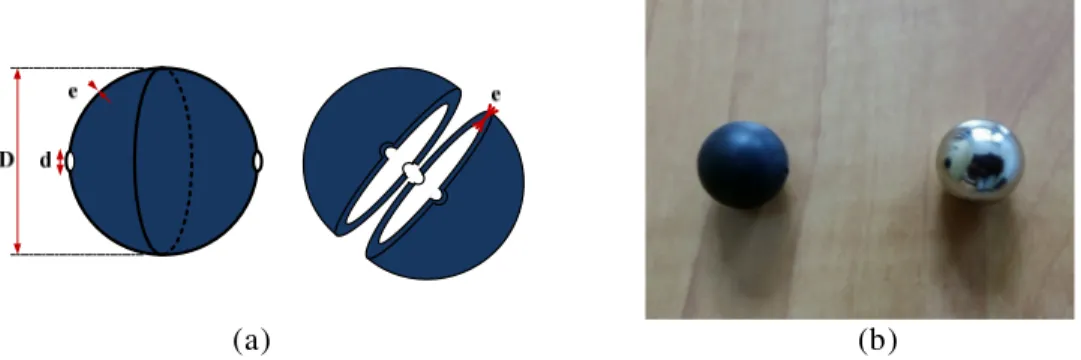
Figure 1.2: Le grillage de mesure
La Figure 1.2 présente le grillage de mesure. Les capteurs (a), de diamètreDc, sont espacés d'une distanceLHhorizontalement etLVverticalement. Un comportement thermique transitoire est créé par effet Joule grâce à un fil métallique (b) de diamètreDf ≪Dcqui
traverse chaque capteur le long de son diamètre. Ce fil sert également de support pour la fixation de chaque rangée de capteurs à des ressorts (d) fixés au cadre (c) du grillage. Une source de tension (e) fournit l'énergie électrique nécessaire pour produire par effet Joule la quantité de chaleur suffisante pour créer une augmentation suffisante de la température de chaque capteur. Quelques mini-ventilateurs (f) sont utilisés pour modifier la vitesse de l'air durant la mesure de la TMR (paragraphe 1.3.2).
1.2.1. Modèle thermique du capteur
15 géométries considérées. Pendant la durée dt, la quantité de chaleur Q dtist stockée par le
capteur est fonction de la quantité de chaleur Qiconvdt échangée par convection avec l'air
ambiant, de la quantité de chaleur Qraddt
i
échangée par rayonnement avec le milieu environnant, de la quantité de chaleur Qicond dt échangée par conduction interne, et de la
quantité de chaleurQcond_f dt
i
échangée par conduction avec le fil métallique. La relation qui matérialise l'équilibre thermique de chaque capteur est donnée par l'équation (1.1)
_
st conv rad cond cond f
Q =Q +Q +Q +Q
i i i i i
(1.1)
(a) (b)
Figure 1.3: Modèle thermique du capteur. (a) Cas d'une sphère ; (b) Cas d'un disque Compte tenu des caractéristiques thermo-physiques et géométriques du capteur, trois hypothèses sont posées.
Hypothèse 1 : Le capteur est mince du point de vue thermique.
Conformément à la démonstration faite par Incropera (Incropera et al., 2007), tout solide dont le nombre de Biot1 est inférieur à 0.1 (Bi <0.1) est thermiquement mince. À tout instantti, la température est la même pour tous les points de ce solide. De cette hypothèse, il vient qu'aucun gradient thermique n'existe à l'intérieur du solide et par conséquent la chaleur interne de conduction est négligeable :Qcond →0
i
.
Hypothèse 2 : La quantité de chaleur échangée entre le fil et le capteur est proportionnelle
à la quantité de chaleur produite par effet Joule.
La procédure de mesure comprend deux phases. La première phase est le chauffage du capteur par effet Joule. Durant cette phase, la chaleur échangée par conduction entre le
1 Bi hV kA/
16
capteur et le fil métallique est proportionnelle à la chaleur produite par effet Joule dans la zone de contact entre le capteur et le fil métallique. On a 2
_
cond f
Q =cte RI×
i
. Rest la résistance électrique du fil métallique et I le courant électrique dans le fil. La seconde phase est le refroidissement du capteur sous les conditions ambiantes. Durant cette phase, nous posons la conditionQcond_f Qconv+Qrad
i i i
≪ satisfaite, c'est-à-dire que la chaleur perdue par conduction
entre le capteur et le fil métallique est négligeable devant les chaleurs échangées par convection et par radiation. On écrit donc
2 _
durant la phase de chauffage du capteur 0 durant la phase de refroidissement du capteur
cond f cte RI Q = × i (1.2)
Hypothèse 3 : Le CTCC het tous les paramètres thermo-physiques sont constants.
En considérant ces trois hypothèses, étant donné que (Incropera et al., 2007) p st dT Q c V dt ρ = i , Qconv = −hA T T( − air) i et
(
4 4)
rad rad Q = −σεA T −T i , l'équation (1.1) devient : ( )(
)
( ) 4 4 _ 0 0p air rad cond f
dT c V hA T T A T T Q dt T t T ρ σε = − − − − + = = i (1.3)
Dans l'équation (1.3), T0est la température initiale du capteur,T est sa température à
l'instantt,ρ est sa masse volumique, c est sa chaleur spécifique, p V est son volume, Aest
son aire,ε est son émissivité,h est le coefficient de transfert de chaleur par convection
(CTCC), Ta ir est la température de l'air, Trad est la TMR etσ est la constante de Stefan-Boltzmann.
Lorsque l'équilibre thermique est atteint, le capteur a pour températureT , le premier eq
membre de l'équation (1.3) s'annule. On obtient donc :
(
)
_ 4 4 cond f rad eq eq air Q h T T T T A σε σε = + − − i . (1.4) En portant l'équation (1.4) dans la relation (1.3), avecl V A= / la longueur caractéristique ducapteur, on obtient
(
)
(
)
( ) 4 4 0 0 p eq eq dT c l h T T T T dt T t T ρ σε = − − − − = = . (1.5)17 En exploitant les relations (1.4) et (1.5), il est possible de déterminer les trois paramètres ambiants que sont la température de l'air, la vitesse de l'air et la TMR.
1.2.2. Capteur recouvert d'une couche de peinture de grande émissivité
Compte tenu des propriétés électriques et thermo-physiques des métaux, les capteurs doivent idéalement être métalliques. Seulement, en général, les surfaces métalliques ont un coefficient de réflexion proche de un. Elles sont extrêmement réfléchissantes, par conséquent leur température est difficile à mesurer par une caméra IR. Pour lever cette contrainte, on recouvre ces surfaces par une fine couche d'un matériau de grande émissivité. A condition que le contact entre la surface métallique et la couche émissive soit parfait, la température mesurée par la caméra IR à la surface de la couche émissive est égale à la température de la surface métallique. Lorsque le capteur est recouvert d'une fine couche d'un matériau de grande émissivité, le bilan thermique de l'ensemble (Capteur + couche émissive) devient :(
) (
)
(
)
( )(
)
( ) 4 4 _ 0 0p c p e air rad cond f
dT c V c V hA T T A T T Q dt T t T ρ ρ σε + = − − − − + = = i . (1.6)
En exploitant les relations (1.4) et (1.6), on arrive à
(
)
(
)
(
)
(
)
(
)
( ) 4 4 0 0 p c c p e e eq eq dT c l c l h T T T T dt T t T ρ ρ σε + = − − − − = = . (1.7)Dans les équations (1.6) et (1.7), lc =Vc/Aetle=Ve/Asont les longueurs caractéristiques respectivement du capteur et de la couche émissive.
1.2.3. Validation numérique du modèle thermique
Pour valider numériquement les modèles thermiques (1.3) et (1.6), nous réalisons quelques simulations à l'aide du logiciel Comsol. Afin que notre première hypothèse soit vérifiée, le capteur considéré est une sphère creuse, de rayon interneR1et de rayon
externeR2. Lorsque le capteur est recouvert d'une couche d'un matériau de grande
émissivité, celle-ci est de rayon interneR2et de rayon externeR3. La Figure 1.4 présente une
coupe longitudinale du capteur dans les deux cas envisagés. La validation numérique consiste à fixer la valeur du CTCC, de la température de l'air et de la TMR, puis à comparer
18
la température obtenue par simulations à celle donnée par l'un ou l'autre des modèles (1.3) et (1.6). Les deux solutions sont obtenues en considérant un pas temporel de 0.2 seconde et une durée totale de cinq minutes. Les données utilisées durant cette validation numérique sont consignés dans le Tableau 1.
R1
R2
(a) (b)
Figure 1.4: Géométrie utilisée pour la validation numérique du modèle thermique du capteur. (a) : Capteur sans couche émissive. (b) : Capteur avec couche émissive
Grandeurs Tair(°C) Trad(°C) T0( )°C
(
)
2 1
h Wm K− − ( ) 1
R mm R mm2( )
Valeurs 22; 30 22; 30 max(T Tair, rad)+6 7; 25;50; 65;120 5 6
Aluminium Acrylique Grandeurs ρ
(
kg m−3)
⋅ cp(
J kg 1 K 1)
− − ⋅ ⋅ ρ(
kg m−3)
⋅ cp(
J kg−1 K−1)
⋅ ⋅ R mm3( ) Valeurs 2700 900 1190 1470 6.1Tableau 1: Données utilisées pour la validation numérique.
1.2.3.1. Capteur sans couche émissive
0 100 200 300 -0.1 0 0.1 0.2 0.3 0.4 0.5 Temps [s] Tm od el e Tco m so l [° C ] h = 7W.m-2.°C-1 h = 25W.m-2.°C-1 h = 50W.m-2.°C-1 h = 65W.m-2.°C-1 h = 120W.m-2.°C-1 0 100 200 300 -0.1 0 0.1 0.2 0.3 0.4 0.5 Temps [s] Tm od el e Tco m so l [° C ] h = 7W.m-2.°C-1 h = 25W.m-2.°C-1 h = 50W.m-2.°C-1 h = 65W.m-2.°C-1 h = 120W.m-2.°C-1 0 100 200 300 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 Temps [s] Tm od el e Tco m so l [ °C ] h = 7W.m-2.°C-1 h = 25W.m-2.°C-1 h = 50W.m-2.°C-1 h = 65W.m-2.°C-1 h = 120W.m-2.°C-1 (a) (b) (c)
Figure 1.5: Validation numérique pour un capteur d'épaisseur1m m (R1 =5mm,R2 =6mm). (a): 22
air rad
T =T = °C. (b): Tair =30°C T; rad =22°C. (c): Tair =22°C T; rad =30°C
Le capteur, une sphère creuse en aluminium, a une épaisseur de 1mm. La Figure 1.5 présente la différence entre la température donnée par Comsol à la surface du capteur et la