HAL Id: hal-01065232
https://hal.archives-ouvertes.fr/hal-01065232
Submitted on 18 Sep 2014
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of
sci-entific research documents, whether they are
pub-lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destinée au dépôt et à la diffusion de documents
scientifiques de niveau recherche, publiés ou non,
émanant des établissements d’enseignement et de
recherche français ou étrangers, des laboratoires
publics ou privés.
Dimensionnement des organes de stockage électriques
pour véhicules blindés terrestres à partir de leurs profils
de mission
Dominique Dreulle
To cite this version:
Dominique Dreulle. Dimensionnement des organes de stockage électriques pour véhicules blindés
terrestres à partir de leurs profils de mission. Symposium de Génie Électrique 2014, Jul 2014, Cachan,
France. �hal-01065232�
8-9 juillet 2014, Cachan
Dimensionnement optimal des sources d’énergie électriques des
véhicules blindés terrestres par la prise en compte de leur profil
d’emploi
Prénom NOM des auteurs : Dominique DREULLEAffiliation des auteurs : laboratoire IREENA Saint Nazaire et Direction Générale de l’Armement.
RESUME – L’électrification des véhicules militaires s’accroit fortement depuis une quinzaine d’années. Dans ce contexte
d’électrification croissante, de multiplication des consommateurs électriques, des sources d’énergie, d’augmentation de la consommation d’énergie, une nécessaire problématique d’optimisation globale des sources d’énergie embarquées s’impose. Les travaux ont pour objectif de développer une méthode de dimensionnement optimal des sources d’énergie
des véhicules de combat terrestres à partir de leurs profils d’emploi. La méthode retenue reprend la chaine Markov pour modéliser les missions et l’adapte aux spécificités des missions militaires. Les travaux ont abouti à la nécessité de développer un processus de Markov à 5 variables, à la définition et l’exploitation de nouveaux critères de dimensionnement différents de ceux classiquement utilisés dans les applications civiles.
MOTS-CLES – Véhicules, terrestres, militaires, profils d’emploi, sources d’énergie, dimensionnement, Markov.
1. Introduction - Contexte
A l’instar du secteur civil, l’électrification des véhicules militaires s’accroit fortement depuis une quinzaine d’années (figure 1).
De nombreux auxiliaires sont maintenant alimentés ou actionnés électriquement (tourelles, climatisation, boîtes de vitesses, poutre
de refroidissement, …), de nouveaux équipements sont installés (DAL, DOP, DIC, brouilleur, …). L’ajout d’une propulsion
hybride-électrique va nécessiter une puissance électrique embarquée qui pourrait s’élever à plusieurs centaines de kw. Enfin dans un futur un peu plus lointain des armements électriques seront peut être installés à bord entrainant des niveaux de puissance embarquée extrêmement élevés.
A moyen terme, la propulsion électrique restera la principale consommatrice d’énergie.
Cet intérêt pour les propulsions électrique n’est pas exclusivement motivé, comme pour le secteur civil, par la diminution de la consommation de carburant et ses conséquences bénéfiques sur l’environnement et les réserves en énergie fossile, mais surtout par les avantages opérationnels qu’elles apporteraient. A titre d’exemple on citera la possible création d’un mode furtif, le véhicule se déplaçant uniquement à l’aide de la propulsion électrique (tableau 1).
Dans ce contexte d’électrification croissante, de multiplication des consommateurs électriques, des sources d’énergie, d’augmentation de la consommation d’énergie, une nécessaire problématique d’optimisation globale des sources d’énergie s’impose.
Le laboratoire IREENA travaille depuis plusieurs années sur les méthodologies statistiques de dimensionnement à partir des
profils d’emploi.
Les présents travaux faisant l’objet de cette proposition ont pour objectif de développer une méthode de dimensionnement optimal des sources d’énergie des véhicules de combat terrestres à partir de leurs profils d’emploi.
Ces travaux sont financés par la Direction Générale de l’Armement en collaboration avec le laboratoire IREENA.
L’objectif est de réaliser des dimensionnements des sources d’énergie à partir d’un grand nombre de scénarios et ainsi dégager les
meilleures solutions répondant au cahier des charges, par une approche de type plan d’expérience.
Une des problématiques fondamentales de cette méthode concerne la modélisation de scénarios, ceci devant être plausibles donc cohérents et probables donc statistiquement modélisables.
La méthode retenue pour le dimensionnement des sources d’énergie des véhicules blindés terrestres, reprend la chaine Markov et l’adapte aux spécificités des missions militaires.
On trouve dans la littérature deux grands types d’approche statistique pour modéliser une infinité de scénarios d’emploi. La première s’appuie sur la connaissance des lois de probabilités des variables étudiées. Jérôme Delanoë [1] développe une méthode d’analyse prévisionnelle et stochastique des consommations électriques de charges multiples et applique cette méthode aux
réalisées lors d’exercices d’entrainements opérationnels, un modèle temporel d’analyse basé sur les fonctions de répartition des
consommations en amplitude, en durée de maintien, en probabilité de reconduite, des différentes phases de consommation. Un algorithme de Monte-Carlo peut générer une multitude de scénarios, permettant de dimensionner en amont les sources
d’énergie.
La seconde approche s’appuie sur des chaines de Markov, Gwenaëlle Souffran [2] modélise le processus temporel par une chaine
de Markov, lui permettant par un algorithme de simulation intégrant une méthode de Monte-Carlo, de générer un nombre illimité
de scénarios. Ces scénarios sont ensuite utilisés pour calculer la consommation de carburant et d’énergie électrique d’une
propulsion hybride série.
2. Modélisation
2.1 Les enjeux
Tableau 1
:
Les enjeux de l’optimisation des sources d’énergieN° Enjeux Commentaires Satisfaction
1 consommation carburant -enjeu écologique non majeur - chaîne log et autonomie
2 rejets polluants -enjeu écologique non majeur - politique écologique globale
3 performances de mobilité - surpuissance transitoires - avantage opérationnel
4 furtivité acoustique - avantage opérationnel
5 furtivité thermique - plus opérationnel
6 disponibilité - plus opérationnel
7 gestion optimisée des consommateurs - faire face à l’accroissement de la conso électrique, délestage,
8 Nouvelle fonction groupe électrogène
9 faciliter la conception suppression de contraintes mécaniques
Comme le montre le tableau 1, l’intérêt de l’électrification des fonctions passe essentiellement par les avantages opérationnels que cela va induire que par son impact écologique. La quantité de véhicules concernés, quelques milliers au total, est trop faible pour impacter conséquemment.
2.2 Modèle de Markov
Une chaine de Markov est un processus stochastique discret qui détermine l’état futur d’une variable , uniquement à partir de l’état présent. L’état futur ne dépend pas de l’état passé. Une chaine de Markov est modélisé par une matrice carré n x n, ou n représente le nombre d’états de la chaine de Markov.
Chaque élément Pij de la matrice représente la probabilité de transition de l’état Sià t vers l’état Sj à t+1
(i,j=1,…,n)
2.3 Spécificité du véhicule militaire
Un véhicule blindé militaire est généralement très lourd au regard de son volume, le rapport poids/puissance a pour ordre de grandeur 20cv/tonne alors que pour un véhicule de tourisme le rapport poids/puissance est de l’ordre de 65cv/tonne.
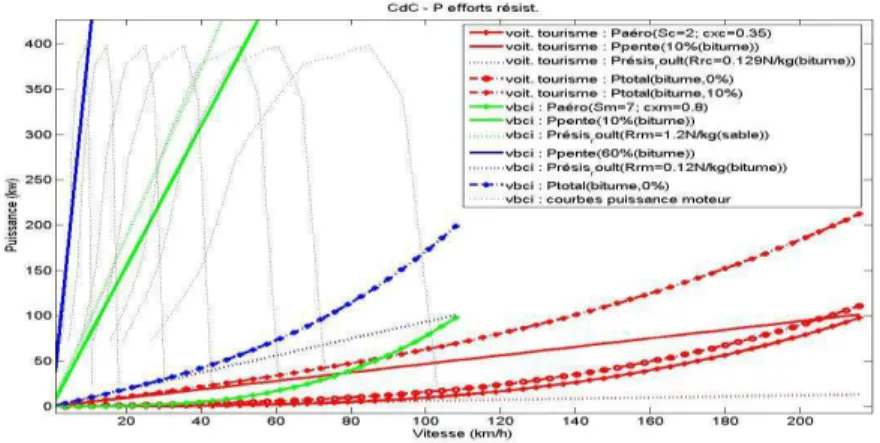
La figure 1 présente les puissances consommées pour le déplacement d’une voiture de tourisme (courbes en rouge), celle-ci se déplaçant sur route sur une large plage de vitesses, le coefficient de résistance au roulement est relativement constant (bitume), les variations de pente sont généralement faibles (sauf en zone montagneuse).
Le véhicule militaire évolue sur tout type de nature de terrain, le coefficient de résistance au roulement peut varier de 0.12 N/kg
(bitume) à 1.2 N/kg(sable). Les vitesses d’évolution sont très faibles, les variations de pentes importantes, le niveau de pente
franchissable ponctuellement est de l’ordre de 60%.
Les puissances consommées au déplacement (courbes bleues et vertes) sont beaucoup plus élevées, et principalement induites aux faibles vitesses par la pente et la résistance au roulement. La résistance aérodynamique est presque négligeable.
Tableau 2
:
caractéristiques générales des missionsMissions 1 2 3 4 5
distance parcourue (m) 24127 42538 55807 32720 26517
durée totale (s) 47062 43019 44511 15451 10721
durée totale roulage(s) 6160 (13.09%) 8495 (19.75%) 9150 (20.56%) 5135 (33.04%) 4067 (37.94%) durée totale arrêt(s) 40902 (86.91%) 34524 (80.25%) 35361 (79.44%) 10316 (66.96%) 6654 (62.06%)
Vmoy (m/s) 3.9167 5.007 6.1 6.37 6.52
Nombres d’arrêts 131 92 106 40 88
Temps d’arrêt moy (s) 313.2 376.19 334.58 258.75 74.4
Comme le montre le tableau 2 issu des relevés de missions d’entraînement d’un véhicule blindé, les temps d’arrêt sont prépondérants, les vitesses moyennes sont très faibles.
2.4 Adaptation de la chaine de Markov
Pour tenir compte des spécificités des véhicules militaires, la chaine de Markov devra prendre en compte les variables suivantes : - vitesse à t,
- vitesse à t-1,
- pente,
- altitude,
- chronogramme des phases de fonctionnement.
Il s’agit d’un processus de Markov à 5 variables, la prise en compte de ces 5 variables est nécessaire, pour assurer la corrélation entr’elles, et la cohérence des enchaînements d’états.
Un processus de Markov génère une succession d’états déterminés statistiquement, cependant la non prise en compte de certains paramètres génère des manques de cohérence lors des enchaînements d’états.
On constate :
- des phénomènes d’ondulation du signal des vitesses, non cohérents d’une conduite réelle,
- des générations de profils géométriques respectant peu les conditions d’origine des valeurs mesurées, si l’on ne tient pas
compte de l’altitude,
- des fonctions de répartitions des temps d’arrêts peu représentatives sur les longs arrêts et les arrêts très courts.
Le processus de Markov à 5 variables permet de déterminer à partir de l’état à l’instant t, l’état
à l’instant t+1.
La figure 2, présente les fonctions de répartition des temps d’arrêts de 1000 missions simulées (courbe rouge mission réelle de référence), la figure 3, présente les fonctions de répartition des vitesses des mêmes 1000 missions simulées (courbe rouge mission réelle de référence),
Cette partie des travaux sera présentées en détail dans la version finale de l’article.
2.5 Critères de dimensionnement
Ces missions sont ensuite exploitées à partir de critères permettant un dimensionnement optimisé des sources d’énergie électrique. Exemple :
En roulage mode furtif (tout électrique), le critère suivant est utilisé :
k et k’ : quotités d’énergie non restituées si mode hybride avant
Avec D’=t – T pour chaque mission
: Quantité d’énergie consommée par les auxiliaires pendant les phases de roulage jusqu’à l’instant t
: quantité d’énergie nécessaire au déplacement jusqu’à l’instant t
: quantité d’énergie récupérée pendant le déplacement jusqu’à l’instant t
: Seuil mini d’énergie stockée pour assurer le redémarrage
: quantité d’énergie stockée au départ de la mission Avec D’=t – T pour chaque mission
T : départ du mode furtif t : fin du mode furtif
On peut déterminer t ou la capacité QD nécessaire pour assurer 95% des missions.
3. Conclusion
L’emploi d’une chaine de Markov à 5 variables s’avère adaptée pour la modélisation des profils d’emploi. Elle permet à partir de
critères spécifiques de dimensionnement de déterminer les caractéristiques optimales des sources d’énergie. Perspectives : prise en compte des caractéristiques technologiques des composants, recherche de modèles adimensionnels.
4. Références
[1] Jérôme DELANOE, « Analyse prévisionnelle et stochastique des consommations électriques de charges multiples : Application aux systèmes embarqués des véhicules de combat mobiles terrestres », thèse de Doctorat 2008, laboratoire IREENA St Nazaire (France).
[2] Gwenaëlle SOUFFRAN, « Dimensionnement de la chaîne de traction d’un véhicule électrique hybride basé sur une modélisation stochastique de ses profils de mission» thèse de Doctorat 2012, laboratoire IREENA St Nazaire (France).