1
THESE DE DOCTORAT
Présentée par :
El Hassan ACHOUYAB
Discipline : Physique
Spécialité : Mécanique
Modélisation Théorique et Numérique des Phénomènes de Coup
de Bélier avec Prise en Compte de l'Interaction Fluide Structure
Soutenue le : 22 janvier 2016 Devant le jury:
Président :
Kamal GUERAOUI : PES à la Faculté des Sciences de Rabat. Examinateurs :
Abderrahmane EL HARRIF Najem HASSANAIN El Hassan El KAFSAOUI Bennasser BAHRAR
: PES à la Faculté des Sciences de Rabat. : PES à la Faculté des Sciences de Rabat. : PES à la Faculté des Sciences de Kenitra. : PES à l’ENSET de Mohammedia.
Invité :
Mohamed SAMMOUDA : Docteur, chercheur associé à l’équipe de modélisation en Mécanique des fluides et en environnement, à la Faculté des Sciences de Rabat.
UNIVERSITÉ MOHAMMED V
FACULTÉ DES SCIENCES
RABAT
2
Remerciements
Les travaux présentés dans cette thèse ont été effectués au sein du laboratoire de Mécanique, dans l’UFR de Mécanique et Energétique à la Faculté des Sciences de Rabat de l’Université Mohammed V.
Je tiens, vivement, à exprimer mes remerciements et ma profonde gratitude à mon Directeur de thèse, Monsieur le Professeur Bennasser BAHRAR, Professeur à l’Ecole Normale Supérieure de l’Enseignement Technique de Mohammedia, Université Hassan II de Casablanca, de m’avoir accepté dans son équipe et pour l’encadrement sans faille dont il m’a entouré au cours de la réalisation de ce travail.
Je suis très honoré que Monsieur le Professeur Kamal GUERAOUI, Professeur à la Faculté des Sciences de Rabat, Université Mohammed V, d’avoir accepté d’examiner ce travail, d’en faire rapporteur et de présider le jury de thèse. Je tiens, vivement, à lui exprimer mes remerciements et ma profonde gratitude.
Ma gratitude et mes remerciements vont, également, à Monsieur Abderrahmane EL
HARRIF, Professeur à la Faculté des Sciences de Rabat, Université Mohammed V, pour
l’intérêt qu’il a manifesté à ce travail et de bien vouloir accepter de faire partie du jury.
Je remercie, également, Monsieur Najem HASSANAIN, Professeur à la Faculté des Sciences de Rabat, Université Mohammed V, pour l’intérêt qu’il a manifesté pour ce travail et pour avoir accepté de faire partie du jury.
Je remercie, également, Monsieur El Hassan El KAFSAOUI, Professeur à la Faculté des Sciences de Kenitra, pour avoir accepté de faire rapporteur de ce travail et de participer au jury.
Je remercie, également, Monsieur Mohamed SAMMOUDA, Docteur, chercheur associé à l’équipe de modélisation en Mécanique des fluides et en environnement, à la Faculté des Sciences de Rabat, pour l’intérêt qu’il a manifesté pour mon travail et pour avoir accepté de faire partie des invités.
Mes remerciements vont, également, à toute ma famille, et en particulier à mes parents, mon épouse et mes enfants qui m’ont toujours soutenu dans les moments difficiles.
Enfin, je voudrais associer, à mes remerciements, tous ceux qui m’ont aidé au cours de ce travail de grande haleine.
3
Résumé
La compréhension et la maîtrise des phénomènes physiques mis en jeux lors de l’interaction des fluides et des structures, de façon générale, et des écoulements en conduites lors des transports de fluides de façon particulières, requiert une importance majeure à plusieurs niveaux (sécurité des systèmes de transport, développement d’outils de diagnostic spécifiques, optimisation des conditions opératoires, ou prévisionnels, contrôles énergétiques, optimisation et fiabilisation des protocoles de transport de fluides, sécurisation d’ouvrage et dimensionnement, ….).
Ce travail de recherche se place dans ce contexte. Il a pour objet la modélisation théorique et numérique de l’interaction fluides-structures avec comme application l’analyse des phénomènes de coup de bélier en conduites. Il s’agit d’analyser les effets de couplage aux niveaux dynamiques tant pour le fluide que pour la paroi de la conduite dans le cas de comportement élastique linéaire et viscoélastique pour le matériau. Il permet d’aider à une meilleure compréhension de ces phénomènes physiques, et par conséquent, à une meilleure conception des outils de contrôles et à la fiabilisation des protocoles d’exploitation ou de prévision de ces phénomènes lors d’écoulements de fluides en conduites dans un environnement donné.
Cette modélisation s’obtient à partir des équations classiques de conservation de la masse, de la quantité de mouvement et de l’énergie pour un écoulement transitoire de fluide newtonien (eau) et de celles de la paroi de la conduite dans les cas de comportement élastique et viscoélastique. La conduite est modélisée par la théorie des poutres planes de Bernoulli–Euler en vibrations longitudinales et transversales.
On présente un code numérique d’interaction fluides–structures pour résoudre le problème de coup de bélier en conduites à paroi mince. Ce code est le couplage de la méthode des éléments finis associée à l’algorithme de Newmark pour le mouvement de la paroi de la conduite et, pour le fluide, à la méthode des caractéristiques.
Contrairement à la théorie classique, ce code permet d’illustrer les effets secondaires d’interaction fluides–structures affectant les paramètres de coup de bélier dans les cas de conduite élastique et viscoélastique. Ce code peut être généralisé pour prédire les vibrations acoustiques et, en outre, être adapté afin de simuler, en hémodynamique, une maladie artérielle.
Mots-clés: Interaction fluides-structures, écoulements transitoires en conduites, coup de bélier,
théorie des poutres planes, formulation variationnelle, vibrations, méthodes des caractéristiques, méthodes des éléments finis, algorithme de Newmark.
4
Abstract
Understanding and control of physical phenomena games during the interaction of fluids and structures in general, and runoff pipes during transport of fluids specific way, requires a major multi-level (security transportation systems, development of specific diagnostic tools, optimization of process conditions, or forecasting, energy controls, optimization and reliability of fluid transport protocols, project security and sizing, ....).
This research falls within this context. It concerns the theoretical and numerical modeling of fluid-structure interaction analysis purposes as water hammer phenomena pipes. This is an analysis of the coupling effects the dynamic levels that both the fluid to the pipe wall in the case of linear elastic and viscoelastic behavior of the material. It allows helping to a better understanding of these physical phenomena, and therefore having an improved design tools control and the reliability of operating protocols or prediction of these phenomena during fluid flow in pipes a given environment.
This modeling can be obtained from standard equations of conservation of mass, the amount of movement and energy to a transient flow of Newtonian fluid (water) and of those of the pipe wall in the case of behavior elastic and viscoelastic. Driving is modeled by the theory of plane Bernoulli-Euler beams in longitudinal and transverse vibrations.
We present a numerical code of fluid-structure interaction to solve the water hammer problem in thin-wall pipes. This code is the coupling of the finite element method associated with the Newmark algorithm for movement of the pipe wall and, for the fluid, the method of characteristics.
Unlike the classical theory, this code illustrates the side effects of fluid-structure interaction affecting hammer parameters in cases of elastic and viscoelastic behavior. This code can be generalized to predict the acoustic vibrations and, in addition, be adapted to simulate, hemodynamics, arterial disease.
Keywords: fluid-structure interaction, transient flow in pipes, water hammer, flat beam theory, variational formulation, vibrations, methods of characteristics, finite element methods, Newmark algorithm.
5
Liste des publications et communications
Publications
1. E.H. ACHOUYAB, H. SAMRI, B. BAHRAR, K. GUERAOUI ,Numerical modeling of
hydraulic transient in plastic pipes, International Review of Mechanical Engineering
(I.RE.M.E.), Vol. xx, n. x, (accepté le 05/01/2016).
2. E. H. ACHOUYAB, B. BAHRAR, Modeling of transient flow in plastic pipes,
Contemporary Engineering Sciences, Vol. 6, 2013, no. 1, 35 – 47, Hikari Ltd.
3. E. H. ACHOUYAB, B. BAHRAR, Numerical modeling of phenomena of waterhammer
using a model of fluid structure interaction, C. R. Mecanique 339 (2011) 262–269, Elsevier.
4. M. TAMANI, B. BAHRAR, E. H. ACHOUYAB, Theoretical and numerical modeling of
two-phase flow in flexible conduit with consideration of unsteady pipe friction, la Houille
Blanche, n° 6, 2015, p. 96-101.
Communications
1. M. TAMANI, F. AKEF, H. SAMRI, E. H. ACHOUYAB, B. BAHRAR, Analyse de
l’élasticité d’un matériau sur l’onde de pression dans un écoulement diphasique en conduite, 12ème congrès de Mécanique, Casablanca, 21 – 24 Avril 2015.
2. E. H. ACHOUYAB, M. TAMANI, B. BAHRAR. « Modeling of transient flow in plastic
pipes », 11ème congrès de Mécanique, 23-26 Avril, Agadir, 2013.
3. E. H. ACHOUYAB, H. SAMRI, B. BAHRAR, Modélisation numérique d’interaction
fluide-structure : coup de bélier, 10ème congrès de Mécanique, Oujda, 19 – 22 Avril 2011.
4. RAZOUKI, E. H. ACHOUYAB, B. BAHRAR, Modélisation numérique de
l’interaction fluide structures en écoulements transitoires dans une conduite élastique ou viscoélastique (coup de bélier), Le 8ème congrès de Mécanique, 17- 20 Avril 2007, El Jadida-MAROC.
5. H. SAMRI, E. H. ACHOUYAB, B. BAHRAR, Modélisation numérique des écoulements
transitoires, faiblement cisaillés, de solutions de polymères (Modèle d’Oldroyd-B), le 8ème congrès de Mécanique, 17- 20 Avril 2007, El Jadida-MAROC.
6
Table des matières
REMERCIEMENTS…………....………..… RESUME... LISTE DES PUBLICATIONS ET COMMUNICATIONS... TABLE DES MATIERES... NOMENCLATURE... LISTE DES FIGURES ... LISTE DES TABLEAUX …... INTRODUCTION GENERALE...
I. CHAPITRE I : ETUDE BIBLIOGRAPHIQUE………...……
I.1. Introduction ……… I.2. Illustration du phénomène de coup de bélier …….……….………
I.2. 1. Cas de fermeture instantanée de vanne…….……….……… I.2. 2. Estimation de la surpression générée par le coup de bélier…….……..…….… I.3. Conclusion ………..
II. CHAPITRE II : FORMULATION MATHEMATIQUE DE L’INTERACTION FLUIDE-STRUCTURE………..……….….…….
II.1. Introduction……….………..………...……….…….…..…..……
II.2. Hypothèses ………..……….……….….… II.3. Equations de base pour le fluide ……….……..……….…… II.3.1. Champ de vitesse………..……….….…… II.3.2. Equation de conservation de la masse………..…… II.3.3. Equation de conservation de la quantité de mouvement……….…… II.3.4. Equation de conservation de l´énergie ………...………… II.4. Equations pour la conduite ………..………..…….…...…...…. II.4.1. Equation générale de la dynamique ………...…… II.4.2. Loi de comportement du matériau………..……… II.4.3. Théorie des poutres de Bernoulli-Euler……….…....……
a/ Les équations dynamiques longitudinales de la conduite……..………..…… b/ Les équations dynamiques transversales de la conduite……….……
2 3 5 6 9 14 16 17 19 20 21 22 27 27 28 29 29 31 31 31 32 33 36 36 37 41 41 43
7
II.4.4. Modèle rhéologique utilisé………..…...…….… II.5. Système final des équations à résoudre……….……..….….…..……..… II.6. Conditions aux limites……….…...…….……..………
II.7. Conditions initiales……….…….………..…..…..………
II.8. Conclusion ……….………..
III. CHAPITRE III : METHODES DE RESOLUTION ………..…….…….
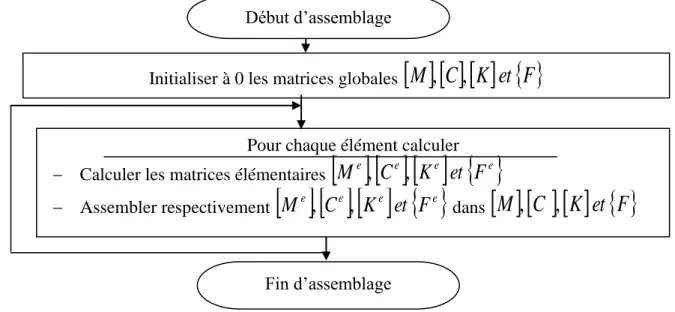
III.1. Introduction ……….……….……….…….. III.2. Méthode des caractéristiques ……….……….…….. III.2.1. Equations relatives au fluide ……….…..…………..…… III.2.2. Transformation le long des courbes caractéristiques………..…………...….... III.2.3. Résolution numérique par intégration le long des courbes caractéristiques …. III.2.4. Conditions aux limites ……….……….…… III.3. Méthode des éléments finis ……….………….…..……….…..…..……. III.3.1. Introduction ……….………..………..……….…… III.3.2. Discrétisation par éléments finis……….………...……… III.3.3. Equations de la structure ……….…..……..…..……… III.3.4. Formulation variationnelle ……….………..……… III.3.5. Couplage longitudinal ……….………..………..….…… III.3.6. Couplage transversal ………..…….….…… III.3.7. Présentation de l’élément utilisé………..…….…….…… III.3.8. Fonctions d’interpolations dans l’élément de référence………...….… III.3.9. Détermination des matrices élémentaires……….……….…… III.3.10. Assemblage des matrices élémentaires……….…..…… III.3.11. Organigramme d’assemblage par projection………..………....……… III.3.12. Algorithme d’assemblage………..……..……… III.4. Intégration temporelle ………..………...……….………..…....…...…
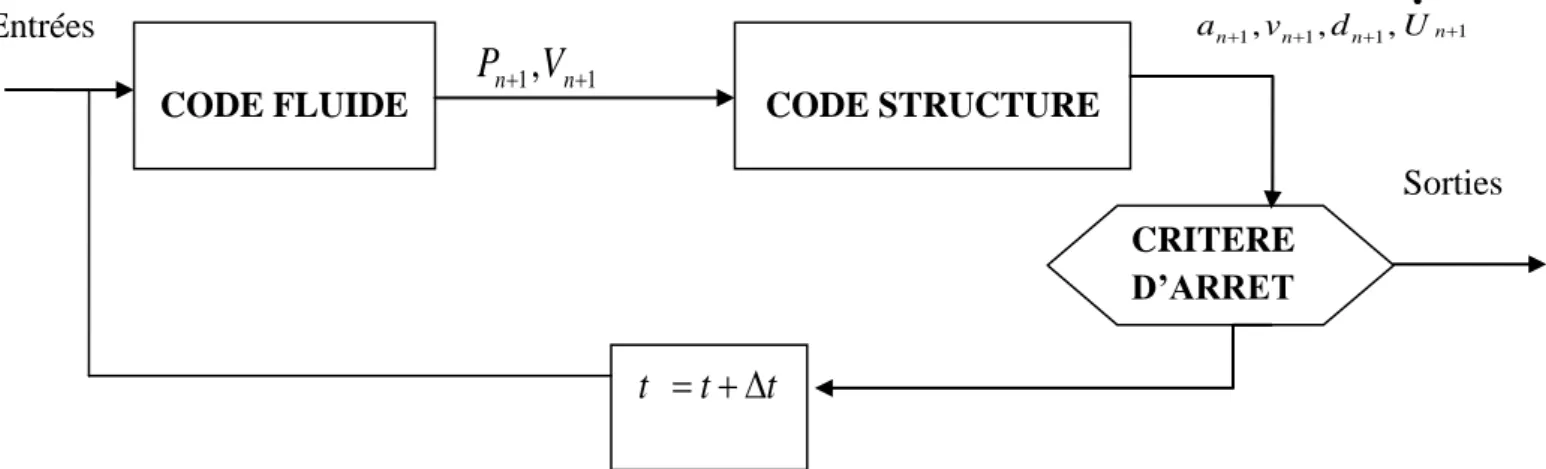
III.4.1. Choix des schémas d'intégration ……….………..……… III.4.2. Méthode implicite de Newmark ……….….….……… III.4.3. Algorithme de calcul ………..………...……… III.5. Schéma de l’algorithme du calcul fluide-structure .……….……...…..…. III.6. Organigramme de calcul fluide-structure ………...……..……….…...…… III.7. Conclusion ………..……….. 44 45 46 47 47 48 49 49 49 50 50 51 52 52 53 54 54 56 58 60 63 65 67 68 69 74 74 74 76 77 78 79
8
IV. CHAPITRE IV : APPICATIONS ET RESULTATS ……….……….…..……
IV.1. Cas des écoulements transitoires en conduites élastiques et viscoélastiques ………..… IV.1.1. Introduction ……….……….... IV.1.2. Données ………. IV.1.3. Cas où l’inertie de la paroi est négligée ………. IV.1.3.1. Modèle simple de la théorie d’Interaction Fluide-Structure (FSI) ….... A / Comparaison théorie et expérience - température 25°C- 38.5°C ………. B / Effet de la viscoélasticité avec la température ………..…. IV.1.3.2. Modèle d’interaction fluide-structure – vibration transversale de la conduite est négligée ………. IV.1.4. Modèle d’interaction fluide-structure – cas général ………..
(Prise en compte des vibrations longitudinale et transversale)
IV.1.5. Conclusion ………..…….. IV.2. Cas d’un écoulement diphasique en conduite flexible avec prise en compte du frottement instationnaire ……….……….……..….………..
IV.2.1. Introduction……….………..……....…....
IV.2.2. Équations de base du problème …………..……….………….………....…....
IV.2.3. Données et résultats………..…………..……..…..…...
IV.2.4. Conclusion………...…….….……
CONCLUSION GENERALE ET PERSPECTIVES ... REFERENCES BIBLIOGRAPHIQUES ... ANNEXES ... 80 81 81 82 83 83 83 84 85 87 89 89 89 90 91 95 97 98 102
9
Nomenclature
f
A Aire de la section transversale du fluide
p
A Aire de la section de la paroi de la conduite
dt
d()/ Dérivée totale
t
()/ Opérateur de dérivation le long des courbes caractéristiques
t
()/ Opérateur de dérivation temporelle
Dérivée temporelle
' Spatiale dérivéer,
Coordonnées cylindriques xx
Contrainte longitudinale dans le matériau
Contrainte circonférentielle dans le matériau)
,
( t
x
R
m
Rayon nominal de la conduite
L
Longueur de la conduiteR
D
Rayon intérieur de la conduite Diamètre intérieur de la conduite
e
Epaisseur de la conduite)
,
,
(
e
xe
re
Base associée au repère cylindrique
V
Champ de vitesse du fluide
v ( , , )
x
x r t
Composante axiale du champ de vitesses du fluidev ( , , )
r
x r t
Composante radiale du champ de vitesses du fluide( , )
U
m
x t
Vecteur déplacement d´un élément de la paroi( , )
U x t
Déplacement axial d’un élément de paroi)
,
( t
x
Déplacement radial d’un élément de paroi ), ( tx
10 f
Masse volumique du fluidep
Pression motrice du fluidef
Tenseur des contraintes visqueuses et représente les efforts de cisaillement au sein du fluidef
Force de pesanteur
Coefficient de frottementa
Célérité de coup de bélier classique
Module de compressibilité du fluide à entropie constanteq Flux de chaleur échangé
T Température, supposée constante
s Entropie du fluide supposée constante
f
T Terme de frottement
Coefficient de dilatation volumique à pression constantep
C Chaleur spécifique à pression constante
m
Masse volumique du matériau de la conduite
m
Tenseur des contraintes
N Effort normal de cohésion
Tt Effort tranchant de cohésion
f
F Force de frottement
p p p A
m Masse de la paroi par unité de longueur
f p t M m m m ,
Masse totale de la paroi et du fluide
L
F
Force exercer par le fluide sur la paroi, due aux vibrations transversaleE Module de Young
) 0 (
E Module de relaxation instantanée.
I Moment d'inertie de la section transversale de la conduite (conduite fluide et matériel)
11 Tenseur de déformations Tenseur de contraintes
I
Tenseur unité xx
Déformation longitudinale
Déformation circonférentielleJ
Tenseur des fonctions de fluage
)
0
(
J
Compliance instantanée du ressort) (t
J Fonction de fluage du matériau
i
J Compliance de l’ième élément de Kelvin-Voigt
e
Déformation élastiquer
Déformation viscoélastiqueJ(t) fonction de fluage en traction associée aux déformations axiales N(t) fonction de fluage en traction associée aux déformations latérales
ij
S Déviateur des contraintes
ij Symbole de Kronecker H Hauteur du réservoir P Pression du fluide : V Vitesse du fluide
U Vitesse longitudinale de la paroi
n, i Indices représentent, respectivement, la discrétisation du temps et l'espace
f
D
Diamètre de la section droite du fluidet
Pas du temps
x
Pas en x, longueur élémentaire de la conduite
N Nombre de nœuds
Nelt Nombre total d’éléments e
12 m
D
Diamètre moyen de la conduite) (M f , g(M) Fonctions scalaires
)
(t
U
i ,W
i(t
)
Déplacements nodaux)
,
( t
x
Rotation de la section droite)
(x
N
iU Fonctions d’interpolation associée au déplacement axialU
( t
x
,
)
)(x
Ni Fonctions d’interpolation associée au déplacement transversal
W
( t
x
,
)
,
i Amortisseurs visqueux*
E Opérateur différentiel associé au module de relaxation du matériau
eM
Matrice élémentaire de masse
eC
Matrice élémentaire de viscosité
eK
Matrice élémentaire de raideur
F
e(t
)
Terme de couplage traduisant le transfert de la quantité de mouvement du fluide à la paroi et inversement
eX
Vecteur élémentaire des déplacements nodaux ][M Matrice masse globale
]
[C Matrice globale d'amortissement
]
[K Matrice globale de Rigidité
F Terme global qui reflète le transfert de la quantité de mouvement
t
X
Vecteur des déplacements des nœuds de la paroi de la conduite
X
(t
)
,
X
(t
)
Vecteurs vitesses et accélérations des nœuds de la paroi de la conduite
,
Paramètres d'intégration de Newmarkn
d
,v
n ,a
n Éléments génériques, respectivement, associés aux déplacements, vitesses et accélérations à l’instantt
n1
n
U vitesse de la conduite à l’instant
t
n1C Célérité du coup de bélier
C* Coefficient de cisaillement de Vardy Decay
13
e0 Epaisseur initiale de la conduite
q
f
Partie quasi-stationnaire du coefficient de frottementu
f
Partie instationnaire du coefficient de frottementk Coefficient de frottement de Brunone
Mg, Ml Respectivement, masse du gaz (air) et du liquide (eau)
P0 Pression atmosphérique
Re=VDt/ν Nombre de Reynolds
S Section droite de la conduite à l’instant t
S0 Section initiale de la conduite
ε/D Rugosité relative de la paroi
ν Viscosité cinématique de l’eau
ρg, ρl, ρ Respectivement, masse volumique du gaz, du liquide et du mélange
gaz-liquide
θ Proportion en masse supposée constante du gaz introduit dans le liquide
14
Liste des figures
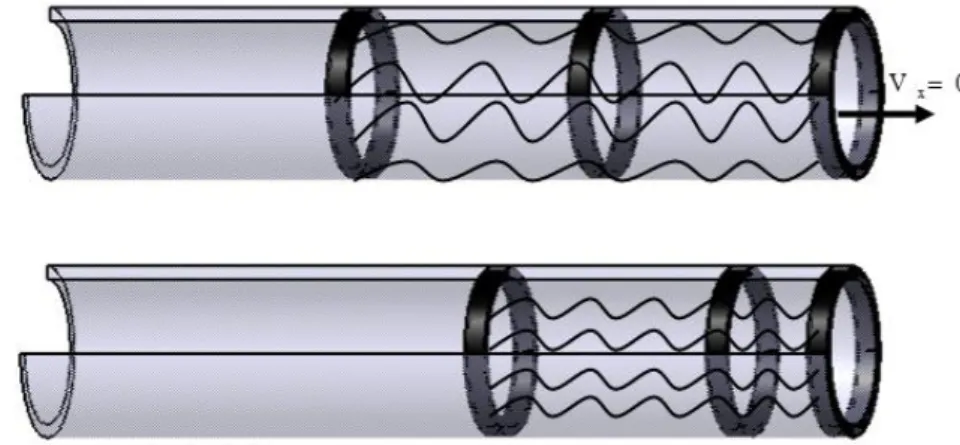
Figure I-1 : Modèle d’anneaux indépendants ……… ………...………..…20
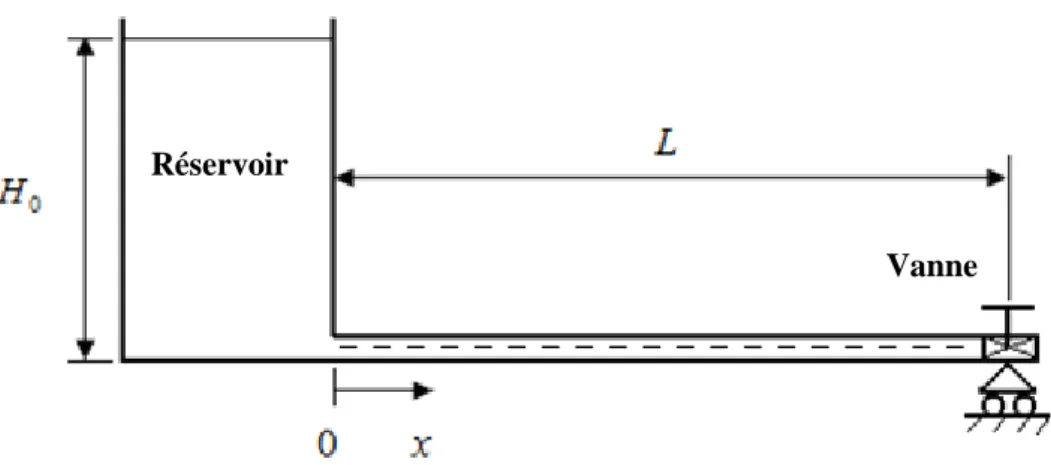
Figure I- 2 : Schéma de l’installation ………...……….….….… 21
Figure I-3 : Illustration de l’évolution de la perturbation du coup de bélier……… 27
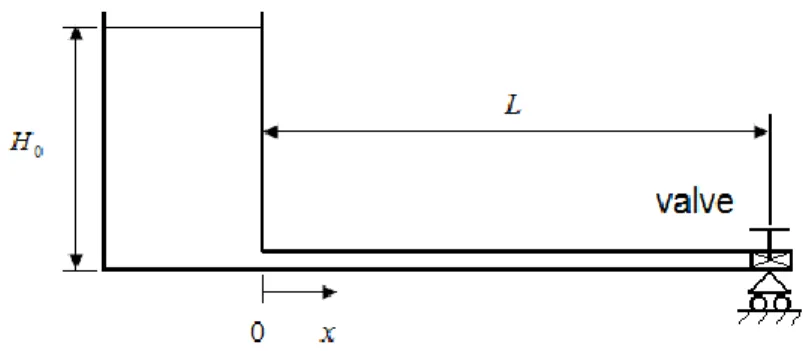
Figure II-1 : Schéma de l’installation étudiée ………..…………29
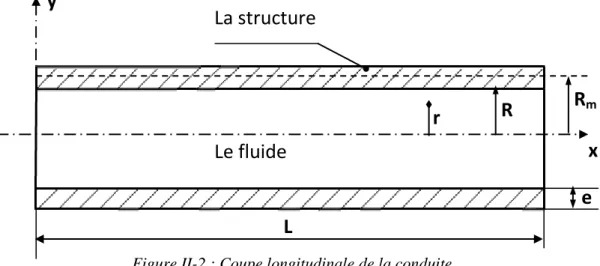
Figure II- 2 : Coupe longitudinale de la conduite ………..………. 30
Figure II- 3 : État de contraintes et de déplacements dans le matériau de la conduite et vitesse de l´écoulement………...… 30
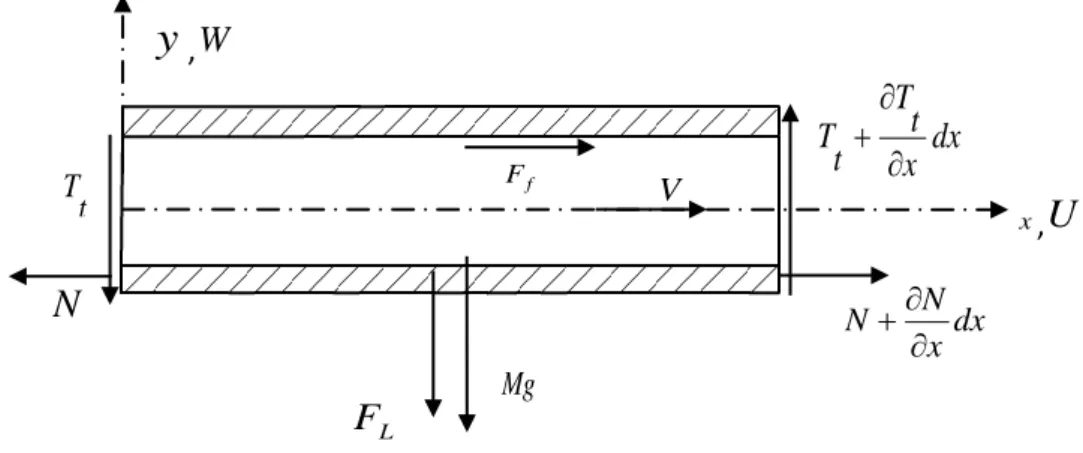
Figure II- 4 : Bilan des forces ..………...… 41
Figure II- 5 : Modèle de KELVIN – VOIGT ..……….………... 44
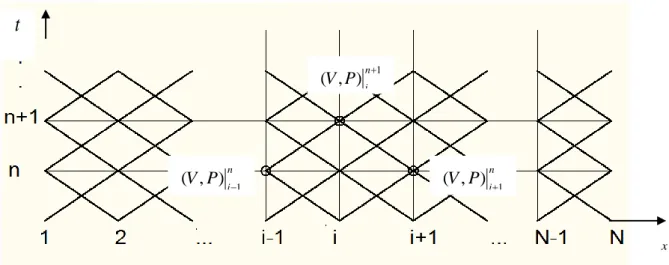
Figure III-1 : Discrétisation du temps et l'espace ..……….………. 51
Figure III-2 : Poutre modélisée par sa ligne moyenne ..……….. 53
Figure III-3 : Elément réel (6ddl) ..……….. 60
Figure III-4 : Elément de référence ..………... 63
Figure III-5 : Elément réel (6ddl) ..………...………... 63
Figure III-6 : Assemblage par projection..………...……….…... 68
Figure III-7 : Organigramme d’assemblage ..………...……….…….. 68
Figure III-8 : Schéma de l’algorithme de calcul fluide-structure ..……….. 77
Figure III-9 : Schéma bloc du code d’interaction fluide-structure ..……… 77
15
Figure IV-1 : Système réservoir-conduite-vanne………..…….. 81 Figure IV-2 : Variation de la fonction de relaxation J(t) en fonction de la température ……. 82 Figure IV-3 : Comparaison des résultats numériques et expérimentales à la température de 25° C ... 83 Figure IV-4 : Comparaison des résultats numériques et expérimentales à la température de 38,5° C ... 83 Figure IV-5 : Effet de la viscoélasticité avec la température ……….……….... 84 Figure IV-6 : Evolution de la pression en fonction du temps à la vanne ……….…… 85 Figure IV-7 : Evolution de la pression en fonction du temps au milieu de la conduite …… 86 Figure IV-8 : Evolution de la contrainte longitudinale au milieu de la conduite …………. 86 Figure IV-9 : Evolution de la vitesse du point médian de la paroi de la conduite ……..… 87 Figure IV-10 : Evolution de la pression à la vanne en fonction du temps dans le cas d’une conduite en polyéthylène……….... 88 Figure IV-11 : Evolution de la pression à la vanne en fonction du temps dans le cas d’une conduite en acier ……….. 88
Figure IV-12 : Pression au milieu de la conduite pour les deux modèles à θ = 10-5…..…... 92
Figure IV-13 : Pression à la vanne pour les deux modèles à θ = 10-5 ………..….… 93
Figure IV-14 : Pression au milieu de la conduite pour les deux modèles à θ = 10-3 ..……… 93
Figure IV-15 : Pression à la vanne pour les deux modèles à θ = 10-3 ………..….… 94
Figure IV-16: Variation de la pression au milieu de la conduite pour différentes proportions de gaz ………..………..…...….…. 94 Figure IV-17 : Variation de la pression à vanne pour différentes proportions de gaz .…... 95
16
Liste des tableaux
Tableau I-1 : Valeur PenBarsen fonction du type du matériau. ………. 27
17
Introduction générale
L’interaction entre un fluide et une structure se produit lorsqu’un fluide, au repos ou en écoulement, rencontre une structure. Ce phénomène est omniprésent dans des domaines divers et variés, comme par exemple, l’acoustique, les problèmes vibratoires, les domaines navals et offshores, la biomécanique. Cette interaction s’exprime dès lors que les efforts exercés par le fluide sur la structure entrainent une déformation et/ou un déplacement de celle-ci, et qu’en retour ceux-ci perturbent l’écoulement du fluide. Cela devient un problème, si cette interaction conditionne le comportement du système et que le couplage entre le fluide et la structure est particulièrement difficile à prédire, cas qui se rencontre par exemple pour de grandes déformations ou de grands déplacements de la structure.
Depuis une quinzaine d’années, ”l’interaction fluide-structure” est un thème fréquent dans les activités de recherche des laboratoires en mécanique.
L'étude classique des phénomènes de coup de bélier dans les conduites est habituellement effectuée en écoulement unidimensionnel et la conduite est censée être déformée instantanément comme si elle se compose d'un empilement d'anneaux sans masse [2, 3, 4]. Une hypothèse moins restrictive et en tenant compte de l'effet de couplage dynamique de la paroi de la conduite à travers le coefficient de Poisson du matériau a été développé par Wiggert et al. [7], Otwell [11], Chaudhry et al. [17, 18] , Bahrar et al. [19, 20, 36] ont mis au point un code numérique à l'aide de la théorie des coques de Timoshenko pour le comportement dynamique de la paroi de la conduite et écoulement bidimensionnel. Plus récemment, Wiggert et Tijsselling [21] ont mené des études similaires, mais dans les hypothèses de Timoshenko poutres.
Notre travail de thèse concerne : La modélisation théorique et numérique de l’interaction fluides structures avec comme application l’analyse des phénomènes de coup béliers en conduites. Le travail présenté ici a été fait, dans la théorie des poutres planes de Bernoulli-Euler [22, 23], pour la conduite en vibrations transversales et longitudinales. Il discute des effets de couplage aux niveaux dynamiques tant pour le fluide que pour la paroi de la conduite dans le cas de comportement élastique linéaire ou viscoélastique pour le matériau.
18
– le premier chapitre est consacré à l’étude bibliographique sur l'interaction fluides- structures.
– le deuxième chapitre développe les équations modélisant l'interaction fluides- structures. Les équations de base sont obtenues à partir des lois classiques de conservation de la masse, de conservation la quantité de mouvement et conservation de l’énergie. Supposons également le fluide est barotrope newtonienne et l'écoulement est axisymétrique et les gradients longitudinaux de la vitesse d'écoulement sont supposés être faibles par rapport aux gradients transversaux. Il décrit également la loi de comportement du matériau de la paroi de la conduite comme élastique ou viscoélastique du modèle de Kelvin Voigt [24], les équations dynamiques longitudinales et transversales de la conduite sont établies par la théorie des poutres de Bernoulli-Euler. Géométriquement, la conduite est supposée cylindrique horizontal et de section circulaire. Une extrémité est rigidement fixée à un réservoir qui impose une pression constante et l'autre extrémité est liée à une vanne.
– le troisième chapitre traite la formulation, les méthodes et les étapes permettant de résoudre les équations établies au deuxième chapitre. Pour le fluide la méthode des caractéristiques est adaptée. Pour la structure on a utilisé la méthode des éléments finis, la formulation obtenue est intégrée en discrétisant la paroi de la conduite déformable à partir d'éléments de barres à 2 nœuds. Le couplage entre la résolution des équations d'équilibre dynamique de la structure et la résolution des équations du fluide est détaillé dans ce chapitre. A ces deux méthodes est associée la méthode d’intégration temporelle.
– le quatrième chapitre sera consacré à l’application à des cas de fermeture de vanne suivant une loi de manipulation donnée pour le cas de fluide newtonien et conduite élastique et viscoélastique : La première application traite la modélisation numérique des phénomènes de coup de bélier en utilisant un modèle d'interaction fluide-structure avec un traitement séparé. La deuxième application traite la modélisation théorique et numérique des écoulements transitoires en conduites plastiques. Enfin, la troisième application traite la modélisation théorique et numérique d’un écoulement diphasique en conduite flexible avec prise en compte du frottement instationnaire.
19
Chapitre I :
20
I.1.
Introduction
Les écoulements de fluides en conduites occupent une place très importante dans notre vie quotidienne (dans les circuits cardiovasculaires, les circuits hydrauliques, les circuits d’acheminement de gaz pour usage domestique ou industriel, climatisation, construction mécanique, les procédés industriels etc. …). La nature de ces écoulements dépend, en plus, de leurs propriétés rhéologiques, physique, chimique, de leurs caractères compressibles ou incompressibles, de leurs régimes laminaires ou turbulents, de la rhéologie de la paroi de la conduite, de son comportement dynamique, de changement de conditions aux limites en un point de l’écoulement qui résulterait d’une manipulation volontaire ou accidentelle conduirait à des sauts brusques de la contrainte de pression et de vitesse dans le fluide.
En hydraulique, gazoduc, pipelines, etc., ces variations de pression et de vitesse, sont appelés communément, les phénomènes de coup de bélier. Elles peuvent produire des phénomènes de cavitation en changeant le caractère monophasique en diphasique du fluide par apparition de poches gazeuse dans ce dernier, ce qui pourrait produire des effets de vibrations et thermiques de la canalisation, les effets dynamiques de la paroi de la conduite sont à l’origine des phénomènes de vibration qui par résonance peuvent conduire à la détérioration du matériau de la conduite. Ces phénomènes peuvent être aussi à l’origine des nuisances acoustiques.
Le changement des conditions thermiques peut influer sur le caractère thermomécanique de la conduite, son caractère élastique, viscoélastique ou viscoplastique.
Par ailleurs si certaines études de ces phénomènes de coup de bélier ont négligé les effets de couplage fluide conduite en considérant celle-ci se déformer sans inertie, comme étant constituée d’anneaux indépendants et sans masse ALLEVI [2], SHALAK [3], BERGERON [4], WYLIE E. B. et al [5] comme le montre le schéma ci-après :
21
A côté de ces études, il en existe d’autres qui ont essayé de tenir compte des effets de couplage fluide conduite à travers le coefficient de poisson du matériau de la conduite et de l’inertie longitudinale de la paroi de la conduite WALKER et al[6], WIGGERT et al [7], d’autres auteurs ont essayé d’appréhender ce problème à partir de la théorie des poutres de THIMOSHENKO [8], en tenant compte de la flexion et de cisaillement générés dans le matériau de la conduite lors de sa sollicitation par le fluide THORLEY [9], HATFIELD et al [10], OTWELL et al [11], STUCKENBRUCK et al [12], d’autres études ont approché ces phénomènes en tenant compte du caractère rhéologique de la paroi de la conduite dans le cas de comportement viscoélastiques linéaires à l’aide des modèles de KELVIN-VOIGT , RIEUTORD [13], RUBINOW et al [14], MOODIE et al [15], BAHRAR [16], CHAUDHRY et al [17, 18], et, plus récemment, BAHRAR [19, 20, 36] a analysé dans un cadre plus général, ces phénomènes transitoires à l’aide de la théorie des coques cylindriques à paroi épaisse et comportement viscoélastique.
I.2. Illustration du phénomène de coup de bélier
Pour raison de simplicité et d’interprétation des résultats, nous nous limitons à un circuit équivalent constitué d’une conduite horizontale de diamètre nominal D , d'épaisseur
e
constante et de longueurL . Cette conduite de section circulaire, est ancrée à l'amont à unréservoir qui impose une pression constante
P
0 correspondant à une hauteur piézométriqueH et, à l'aval, se termine par une vanne de manœuvre.
Figure I-2 : Schéma de l’installation
Vanne Réservoir
22
Pour expliquer le phénomène du coup de bélier, deux cas sont à considérer suivant que :
Cas de fermeture instantanée de vanne, Cas de fermeture progressive de vanne.
I.2.1. Cas de fermeture instantanée de vanne
En se limitant, dans ce cas au fluide parfait, c'est-à-dire en négligeant l’effet de la viscosité et en supposant que la vanne soit fermée instantanément au tempst0. Cette manœuvre, alors, entraîne la génération d’une onde de pression – dépression qui sera décrite suivant les quatre phases suivantes :
Phase 01: Dans cet état, la vitesse des particules liquides qui initialement était
V
0s’annule du fait que ces particules viennent buter contre cette vanne. Ceci a pour conséquence que toute l’énergie cinétique du liquide se transforme en travail de déformation du tuyau et du liquide, compression du liquide et dilatation de la paroi de la conduite (C’est justement cette compressibilité du liquide qui permet d’expliquer le coup de bélier).
La fermeture complète de la vanne, qui fait passer la vitesse de
V
0 à zéro, provoque derrière elle une onde de surpression, alors que dans le reste de la conduite l’écoulement persiste à la vitesseV
0 et à la pressionP
0. Cette onde se propage vers l’amont avec une célérité
a
. Au droit de la vanne, la pression devientP
0
P
, où P est l’augmentation de la pressionP ,donnée par la formule de Joukowsky [01] :
0
.
. V
a
P
(I-1) Ou, en hauteur piézométrique :g
V
a
H
.
0
(I-2) Avec
: la masse volumique du fluide, g: l’intensité de la pesanteur eta
la célérité du coup de bélier, donnée par la formule d’Alliévi [02] :23 E e D a . 1 1
(I-3) Où :
: Module de compressibilité du fluide, e
: Épaisseur de la conduite,
D
: Diamètre nominal.Cette vitesse est, pour un fluide donné, fonction de la nature du matériau. Il est clair que les particules qui suivent immédiatement celles qui se sont immobilisées, sont stoppées à leur tour et ainsi de suite. Donc, l’onde de surpression (annulation de la vitesse et l’augmentation de la pression) se propagera à une vitesse"a", dite vitesse de propagation d’onde ou célérité, de la vanne vers le réservoir (Figure I-3b).
Une fois que toutes les particules du liquide se sont immobilisées dans la conduite et que cette dernière se soit complètement dilatée (une compression du liquide et une dilatation de la paroi de la conduite), la pression dans cette conduite sera
P
P
1 supérieure donc à celle régnant dans le réservoir (juste à l’entrée de la conduite).Donc, au temps
a L
t , l’onde de surpression atteint le réservoir, et on a un état caractérisé par
(Figure I-3c) : Phase 1 : 1 0 1 1 0 P P P V (I-4)
Ainsi, le liquide qui a franchi à la vitesse
V
0 l’entrée de la conduite entre t0 eta L
t sert à compenser la variation de volume dû à la dilatation de la conduite.
Phase 02 : Comme l’état à la fin de la phase 01 n’est pas un état d’équilibre, alors on enregistre un écoulement du liquide de la conduite vers le réservoir vidant ainsi la conduite du volume accumulé sous la surpression. La vitesse d’écoulement de l’eau dans la zone décomprimée est égale à
V
0 mais de signe contraire, c'est-à-dire, elle est dirigée vers l’amont (réservoir). Dans ce cas, le diamètre tend à reprendre son état initial. En conséquence une énergie cinétique apparaît progressivement (Figure I-3d).24
Cette transformation s’effectue également sous forme d’une propagation par une onde de dépression qui a la même célérité
"a
"
et dirigée vers la vanne, qu’elle atteint au tempsa L
t 2 . Cette onde de dépression entraîne les variations suivantes :
1 2 0 1 2P
P
V
V
V
(I-5) A la fin de la deuxième phase la conduite retrouve son diamètre initial et la pression devient0
P
et l’écoulement sera finalement caractérisé par (Figure I-3e) : Phase 2 : 0 2 0 2 P P V V (I-6) Phase 03 : Comme le liquide continue toujours à s’écouler de la conduite vers le réservoir, au niveau de la vanne, ce liquide tend à se décoller de la vanne tout en produisant un abaissement dépression (une transformation de l’énergie cinétique en dépression), c'est-à-dire que l’onde de dépression au contact de la vanne se réfléchit sans changement de signe. Cette onde se propagera alors de la vanne vers le réservoir (Figure I-3f) avec les caractéristiques suivantes:
1 2 3 0 2 3 P P P V V V (I-7) Après un temps a L
t 3 , l’onde de dépression arrive au réservoir, l’eau sera immobilisée et la
pression sera inférieure à la pression initiale, ce qui engendre une contraction de la conduite (Figure I-3g) et l’écoulement sera caractérisé par :
Phase 3 : 1 0 3 3 0 P P P V (I-8)
Phase 04 : Comme la pression
P
3 est inférieure à celle du réservoir qui est maintenue constante et égale àP
0, l’eau s’écoulera alors du réservoir vers la vanne, donc on assiste au remplissage de la conduite augmentant ainsi la pression dans la conduite de1
0
P
P
àP
0. Cela vaut dire que l’onde de dépression se réfléchit sur la surface libre du réservoir en changeant le signe et devient une onde de surpression (ou25
compression) qui descend la conduite. La vitesse du liquide sera égale, à ce moment à
0
V
(Figure I-3h). Donc cette onde a les caractéristiques suivantes : 1 3 4 0 3 4 P P P V V V (I-9)
Il est évident qu’une fois la dépression
P
aura été complètement supprimée, la conduite va reprendre son état initial et se retrouvera donc dans les mêmes conditions que celles qui existaient juste à la fermeture de la vanne (Figure I-3i).Par conséquent, au temps
a L
t4 , on a un écoulement identique à l’écoulement de l’état initial, caractérisé par:
Phase 4 : 0 4 0 4 P P V V (I-10)
On peut donc conclure que le phénomène est périodique de période
a L t 4 .
Dans le tableau ci-dessous, on donne une récapitulation de l’évolution de la dilatation, de la contraction de la conduite et du saut de pression, lors du passage de l’onde de coup de bélier.
Évolution de la déformation de la conduite
Évolution du saut de pression
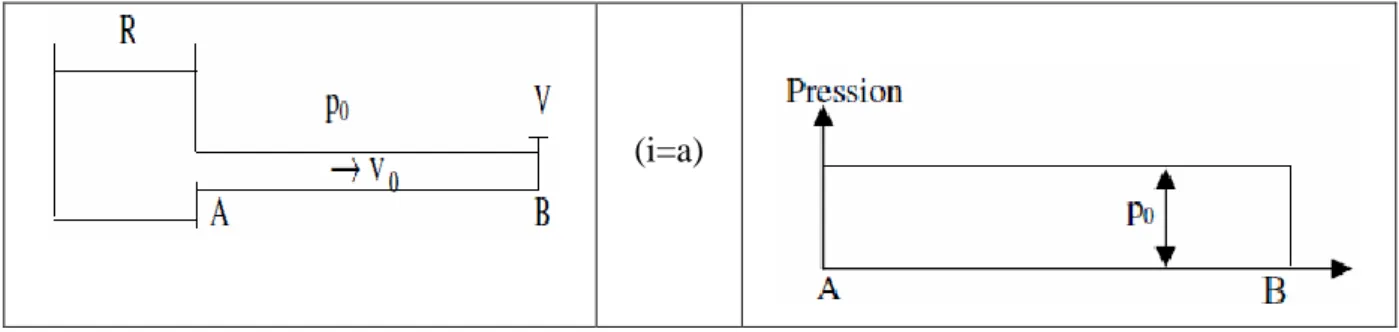
(a)
26 (c) (d) (e) (f) (g) (h)
27 (i=a)
Figure I-3 : Illustration de l’évolution de la perturbation du coup de bélier
Il résulte de cette interprétation que le phénomène se reproduira théoriquement à l’infini (Figure I-3a). Mais en réalité, l’amortissement du phénomène est dû aux pertes de charge par frottement et à la dissipation d’une partie de l’énergie du liquide dans le réservoir (Figure I-3b).
I.2. 2. Estimation de la surpression générée par le coup de bélier
A titre d’exemple, pour pouvoir donner une estimation de la surpression créée lors d’un coup de bélier, on applique la formule de Joukowsky. Cette formule prend en compte de façon instantanée, les caractéristiques de l’installation étudiée.
On a, à titre d’exemple, pour une longueur des tubes 10 m, diamètre équivalent à 12,7 mm, tubes en acier, cuivre et polyéthylène (PE-X) avec vitesse de l’eau
V
0
2
ms
1. Nous reportons les valeurs de la vitesse de propagation de l’onde (a) des temps de manœuvres “brusque” *t (temps de réaction) et de la surpression ∆𝑃 extrait de la formule.m
en
L
1 0.
s
m
en
V
a
en
m
.
s
1 t *enms PenBars Acier 10 2 1411 14,2 28,3 Cuivre 10 2 1400 14,3 28,5 Polyéthylène (PE-X) 10 2 885 22,6 18Tableau I-1 : Valeur Pen Barsen fonction du type du matériau.
A partir des résultats illustrés sur le tableau ci-dessus, on constate que le saut de pression croît avec la rigidité du matériau de la conduite.
I.3. Conclusion
Dans ce chapitre nous avons présenté une étude bibliographique sur l'interaction fluides- structures et une Illustration du phénomène de coup de bélier, en expliquant le phénomène du coup de bélier dans le cas de fermeture instantanée de vanne. Nous avons aussi calculé une estimation de la surpression générée par le coup de bélier.
28
Chapitre II :
Formulation mathématique
de l’interaction
29
II.1. Introduction
Dans cette partie, je présente l’approche théorique et numérique du problème des interactions fluides-structures avec, comme application, l’analyse des phénomènes de coup de bélier en conduites sous pression hydraulique. Il s’agit d’analyser les effets de couplage dynamique du fluide et de la paroi de la conduite. Cette analyse sera faite dans le cas d’une conduite en acier dans le cas d’un comportement élastique linéaire et dans le cas d’une conduite en matériau plastique (polyéthylène) avec prise en compte de son caractère viscoélastique linéaire.
II.2. Hypothèses
On considère un écoulement transitoire dans une conduitecylindrique circulaire de
longueur L (Figure II- 2 et Figure II- 3), ancrée à l’amont à un reservoir de hauteur H qui impose une pression et qui se termine à l’aval, par une vanne de manipulation (Figure II- 1).
Les équations de base sont les relations classiques de conservation associées aux lois de comportement pour le fluide supposé barotrope, newtonien et le matériau de la paroi de la conduite élastique (acier) ou viscoélastique ayant un comportement type Kelvin Voigt (plastique). L’écoulement est turbulent, axisymétrique, de vitesse moyenne très faible par rapport à celle de la perturbation des ondes acoustiques dans le fluide, ce qui permet de négliger les termes convectifs. L’analyse adimensionnelle permet, compte de la géométrie de la conduite, de négliger les gradients longitudinaux de la vitesse de l’écoulement, comparés, aux gradients transversaux.
30 Sur ces figures, nous avons représenté par :
r,
: Les coordonnées cylindriques,xx
: La contrainte longitudinale dans le matériau,
: La contrainte circonférentielle dans le matériau,La structure
y
r
R
R
mFigure II-2 : Coupe longitudinale de la conduite
L
x
e
Le fluide
ye
Figure II-3 : État de contraintes et de déplacements dans le matériau de la conduite et vitesse de l´écoulement
d x
e
ze
U
31
)
,
( t
x
U
: Le déplacement longitudinal d´un élément de la paroi,)
,
( t
x
: Le déplacement radial d´un élément de la paroi,)
,
( t
x
R
m : Le rayon nominal de la conduite,
L
: Longueur de la conduite,R
: Le rayon intérieur de la conduite,e : Epaisseur de la conduite,
x r
v ( , , ), v ( , , )
x r t
x r t
: Composantes axiale et radiale de la vitesse du fluide.II.3. Equations de base pour le fluide
II.3.1. Champ de vitesse
Compte tenu de ces notations et l’axisymétrie de l’écoulement résultant de celle de la conduite, son champ de vitesse peut être modélisé sous la forme :
x r
V = v ( , , )
x r t e
xv ( , , )
x r t e
r
(II-1)(
e
x r
,
e
,
e
)
: base associée au repère cylindrique,V
: champ de vitesse,
Par ailleurs, nous avons les équations de conservations de la masse, de la quantité de mouvement et de l’énergie dans le cas d’un fluide newtonien.
II.3.2. Equation de conservation de la masse
Cette équation se traduit en absence de porosité de la paroi de la conduite et de source interne, par l’expression locale :
32
0
f fd
divV
dt
(II-2)Dans cette relation, on a désigné par :
f
: masse volumique du fluide, où l’opérateur dérivéd
dt
désigne la dérivée particulaire.d
a
gr
V
t
dt
d
D’où, après projection dans le repère cylindrique, l’équation de la conservation de la masse se ramène à
0
)
(
1
f
dρ
f
ρ
1
r
V
r
r
r
x
x
V
dt
(II-3)II.3.3. Equation de conservation de la quantité de mouvement
L´expression locale de la relation de la résultante dynamique liée à une particule fluide est donnée par :
f
f
τ
div
p
grad
dt
dV
f
ρ
(II-4) avecp
: pression du fluide f
: tenseur des contraintes visqueuses et représente les efforts de cisaillement au sein du fluide,f
33
La projection de l’équation vectorielle (II-4) dans le repère cylindrique se ramène à :
Suivant l’axe de la conduite :
r
r
x
V
r
r
x
p
dt
x
dV
f
1
((
/
)
(II-5)Où, nous avons pris en compte, au niveau de la pression, l’effet de la pesanteur
: La viscosité dynamique du fluide.Suivant la direction radiale :
Les effets d’inertie radiale du fluide sont négligeables ce qui amène à l’équation :
0 r p (II-6)
et de ce fait, la pression est pratiquement constante dans chaque section droite de la conduite.
II.3.4. Equation de conservation de l´énergie
L’équation de conservation de l´énergie s’obtient à l’aide du premier principe de la thermodynamique, c'est-à-dire, en termes d’entropie :
f T
Q
q
q '
ds
v
div
T
dt
T
(II-7) Où T : température,QV : flux de chaleur échangé,
s : entropie du fluide supposée constante,
T
Q
v
q
div
T
34
'
0
q
T
: traduit les irréversibilités du système liés à la production de l’entropie.
Cette équation de l’énergie se ramène finalement à l’expression :
4
f f fT V
q
ds
dt
TS
D T
(II-8)s
: entropie du fluide supposée constante,ds
0
dt
et l’expression de la chaleur dissipée par le frottement fluide sur la paroi s’écrit :
D
V
T
S
q
4
fOù
T
f
V V
: terme de frottementMasse volumique
Ayant choisi, pour exprimer la conservation de l’énergie, l’entropie comme variable thermodynamique, nous écrivons la relation d’état sous la forme :
( , )
( , )
fx t
fs p
(II-9) La dérivée particulaire : f f f pd
dp
ds
p
s
dt
d t
d t
s
(II-10)35
1
pV
T
V
: coefficient de dilatation volumique à pression constante,1
1
f f pC
p
T
s
: chaleur spécifique à pression constante,
La dérivée particulaire de la masse volumique devient :
f f
d
1
1 dp
T ds
d t
dt
C
dt
p
(II-11)Dans le cas d’écoulement isentropique, elle se réduit à l’équation différentielle :
f f
d
1
1 dp
d t
dt
(II-11’)Ce qui permet, après élimination de la masse volumique en fonction de la pression, d’écrire l’équation (II-3) sous la forme :
0
)
(
1
d
1
r
V
r
r
r
x
x
V
dt
P
(II-3’) Forme intérgraleL´intégration des équations relatives au fluide sur une section de la conduite, conduit au système d´équations suivant :
dr
t)
r,
(x,
V
r
2
R
1
V
R 0 x 2
(II-12)dr
t)
r,
(x,
p
r
2
R
1
P
R 0 2
(II-13)36 0 x U ν 2 2a x V 2 a x P f ρ V t P f ρ 1 (II-14)
D
V
V
x
P
t
V
f2
(II-15)où la déformation radiale de la conduite, liée à la pression, est éliminée en fonction de la déformation longitudinale liée au coefficient de Poisson comme l’exprime l’équation (II-14).
Nous avons, par ailleurs, les notations :
: coefficient de frottement,a
: vitesse du coup de bélier.1/2 eE f ρ )D 2 ν (1 κ f ρ P a S f 0 (II-16) avec : s f P f
: module de compressibilité du fluide à entropie constante.II.4. Equations pour la conduite
II.4.1. Equation générale de la dynamique
L’équation générale de la dynamique s’écrit :2 2
d Um div
m
F
m
dt
m
(II-17) avec :37 𝜌𝑚 : masse volumique du matériau de la conduite,
m
: tenseur des contraintes,
( , )
U
m
x t
: vecteur déplacement d´un élément de la paroi,r
e
t
x
x
e
t
x
U
t
x
m
U
(
,
)
(
,
)
(
,
)
(II-18) avec :( , )
U x t
: déplacement axial d’un élément de paroi,)
,
( t
x
: déplacement radial d’un élément de paroi,F
: force de pesanteur.
II.4.2. Loi de comportement du matériau
a/ Cas du matériau élastique linéaire isotrope
La loi de comportement d´un matériau élastique (déformation instantanée), linéaire et isotrope peut prendre, de façon classique dans l´état plan des contraintes, la forme suivante :
I Trace E E ( ) 1 (II-19) avec : : tenseur de déformations, : tenseur de contraintes,
I
: tenseur unité.38 E E xx xx (II-20) E E xx
(II-21) avec :( , )
xxU x t
x
: déformation longitudinale,)
,
(
)
,
(
t
x
R
t
x
m
: déformation circonférentielle.On peut, de même, exprimer les contraintes en fonction des déformations, ce qui conduit à :
xx xxE
21
(II-22)
E
2 xx1
(II-23)b/ Cas d’un matériau viscoélastique linéaire isotrope.
Les matériaux viscoélastiques sont caractérisés par des relations de comportement mécanique de type [13-30] :
( )
t
F
( )
t
(II-24) ou la relation inverse :
)
(
)
(
t
G
t
(II-24’)39
exprimant un tenseur des déformations dont chaque composante dépend de la valeur instantanée du tenseur des contraintes et de toutes les valeurs antérieures des composantes de celui-ci et, réciproquement. La déformation viscoélastique n´est pas instantanée mais surtout prolongée et caractérise donc un écoulement réversible dans le temps (si la contrainte appliquée n´a pas encore endommagé le matériau).
Dans le cas d´un matériau viscoélastique linéaire (cas des petites déformations), la loi de comportement (II-24) peut s´écrire :
'
'
)
'
(
)
(
dt
dt
d
t
t
J
t
t kl ijkl ij
(II-25) oùJ
est le tenseur des fonctions de fluage qui admet les symétries suivantes :
ijkl jikl ijlk klij
J
J
J
J
J(t)
(II-26)La déformation d’un matériau viscoélastique linéaire peut se décomposer en une partie élastique
ij
J
(
0
)
ij(
t
)
et une partie visqueuse d d dJ t ij ij ) ( ' ) ( 0 liée à la vitesse de déformation du matériau de sorte que la déformation totale s’écrit sous la forme :
d
d
dJ
t
t
J
ij ij ij)
(
'
)
(
)
(
)
0
(
0
(II-27)On obtient de façon analogue, l’expression de la contrainte totale en fonction du module de relaxation E() :
d
d
dE
t
t
E
ij ij ij)
(
'
)
(
)
(
)
0
(
0
(II-27’)Les premiers termes des relations (II-27) et (II-27’) caractérisent la loi de Hooke pour la partie élastique et le terme de convolution caractérise les effets de viscosité du matériau.
40
Les fonctions de fluage J() et de relaxation E() sont inverses au sens du produit de convolution et nous avons la relation symbolique :
1
)
(
'
)
(
)
(
'
)
(
0 0
d
d
dJ
t
E
d
d
dE
t
J
avec : 01
(0)
J
E
: compliance instantanée du matériauDans le cas d´un milieu isotrope, le tenseur des fonctions de fluage
J
ijkl peut être construitsur la base de deux fonctions de fluage :
J(t) : fonction de fluage en traction associée aux déformations axiales,
N(t) : fonction de fluage en traction associée aux déformations latérales.
Dans le cas où le matériau est en équilibre pour les temps négatifs, on a :
d
dτ
dN
τ)
(t
S
dτ
J
d
τ)
(t
σ
(t)
N(0)S
(t)
σ
J(0)
ε
t ij ij 0 ij ij ij
(II-28) avecij
S
: déviateur des contraintes,ij kk ij ij