Rigid and strongly rigid relations on small domains
Texte intégral
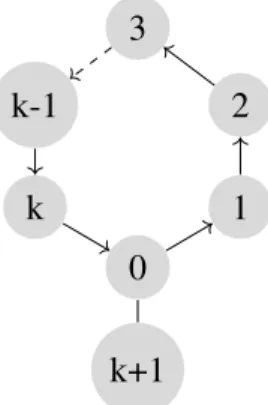
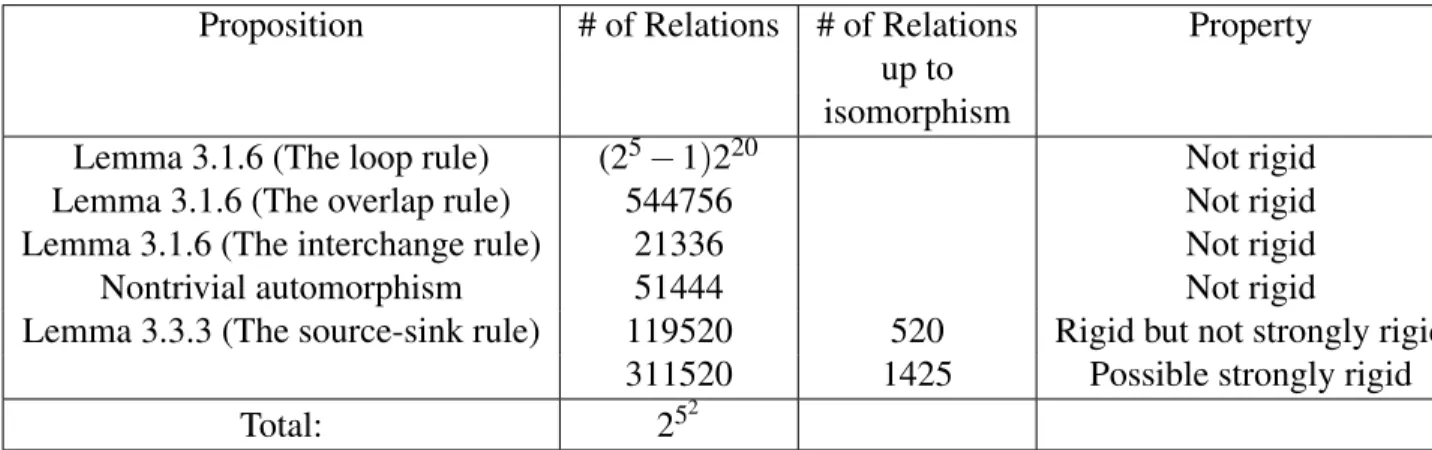
Figure




Documents relatifs
- We study the holomorphic extension of proper holomor- phic correspondences between rigid polynomial domains in (c2 (or convex.. in
Under the assumption that the diameter of the rigid body tends to zero and that the density of the rigid body goes to infinity, we prove that the solution of the fluid-rigid body
We propose here a lecture on the geometry of numbers for normed (adelic) vector spaces over an algebraic extension of Q.. We shall define slopes and several type of minima for
Although we were principally interested in the lowest band, the s band, it was necessary to take.. into account thé interaction between the s and p bands in order to
This introduction continues with sub- sections dealing with Coulomb friction and discontinuous ODEs (section 1.1); impact models (section 1.2); the famous problem of Painlev´ e
Since digital images are basically defined in a discrete framework (i.e., in Z n ), the transformation spaces – despite a potentially high com- plexity – actually remain
Therefore, the technique belongs to the explicit creation branch, and more precisely to the reuse branch (for the error correction) and the circuit expansion (for the error
3.1 Stochastic model for an uncertain rigid body of the multibody dynamical system The properties of the mean model (or the nominal model) of the rigid body RB i are defined by its
