SPATIO-TEMPORAL SEGMENTATION AND REGIONS TRACKING OF HIGH DEFINITION VIDEO SEQUENCES USING A MARKOV RANDOM FIELD MODEL
Texte intégral
Figure

Documents relatifs
In such a situation, a classical approach consists in us- ing a neural network or a supervised classification as- sociated to a set of learning data corresponding to al- ready
Based on the presented model, our goal is to automatically select the cameras (fixed and mobile) that could contain relevant video content with regards to the
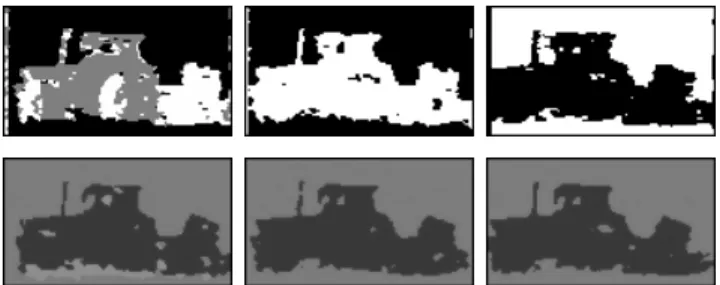
From top to bottom: (1) Input se- quence (with groundtruth overlaid); (2) Segmentation results from regular 3D MRFs with appearance-based observation model (544 pixels
The main forms of mobilities involved are the circulation of people, practices and ideas, the circula- tion of building types, the circulation of different kinds of media, such
The task of segmenting the image time series is expressed as an optimization problem using the spatio-temporal graph of pixels, in which we are able to impose the constraint of
One may wonder if the notion of state can be extended to handle such examples. For instance, in the FRAN frame- work [14] it is possible to express arbitrary equations on the date of
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
Diana Nurbakova, Sylvie Calabretto, Léa Laporte, Jérôme Gensel?. To cite
