A switched dynamic model for pointing tasks with a computer mouse
Texte intégral
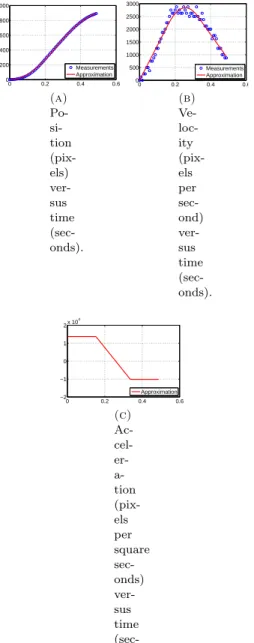
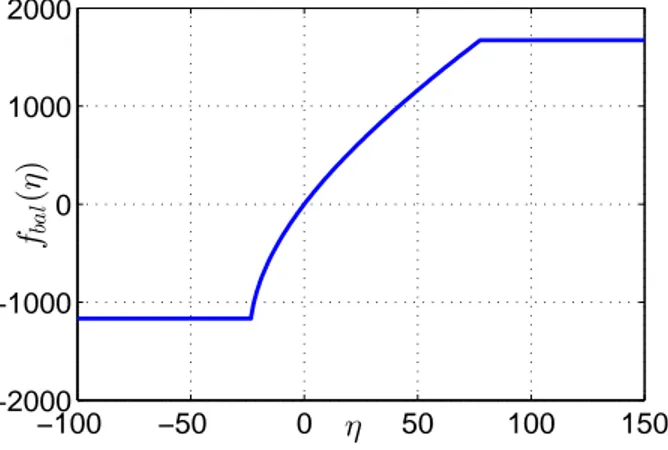
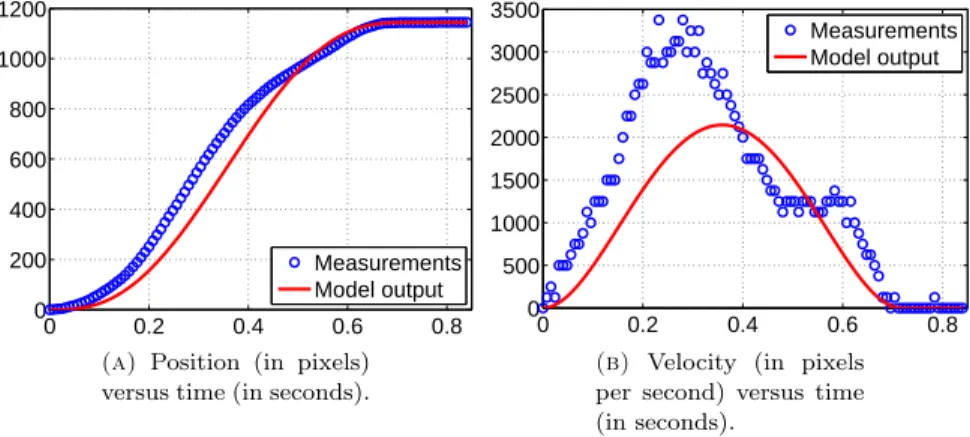
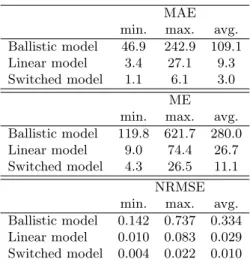
Figure




Documents relatifs
required to induce effects in primary mesothelial cells in in vitro. Cytokine concentration of ascites is compared to limit concentrations required to induce effects on a)
m is a discrete variable which takes values in [1, ` − 1 − θ] (this is the number of times it would be possible to cross the threshold process)... To see that this fixed
The search is approximated (because based on Hamming distances) but exhaustive, requiring n homomorphic encryp- tions of the database representations with the User public key at
The structure of each loop nest, and the location it is injected, are precisely specified by the schedule: a function scheduled as root has realization code injected at the top of
[...] Notre but est de cibler, à l’aide de marqueurs linguistiques et de certaines connaissances grammaticales, des séquences textuelles qui peuvent exprimer un
A l’ instar de Desclés (et al.1994), Gosselin (1996) ou encore (Vet 1994), nous nous situons dans une approche cherchant résolument à mettre à jour le plus possible de
Further, by leveraging neural networks' differentiability, we can use our model to solve the inverse problem - i.e., given desirable EM specifications, we propagate
La charte graphique est très importante pour faire passer des images, et ça ne fait qu’un an à peine qu'on a commencé à faire des campagnes un peu plus institutionnelles ou en
![[PDF] Cours de programmation avec python et le module turtle | Cours python](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)