Problèmes de tournées de véhicules avec contraintes de chargement
Texte intégral
Figure






Documents relatifs
Pour obtenir une estimation de la densit´ e des so- lutions entourant une solution donn´ ee de la popu- lation, nous calculons la distance moyenne entre le point repr´ esentant
On se propose de faire une étude graphique pour déterminer l’effort dans le vérin pour un cas de chargement maxi sur la plateforme.. On néglige l’action du poids des pièces
11 – Tous les rayons étant en contact électrique d’une part avec la circonférence de la roue (de résistance nulle) et d’autre part avec le moyeu O de la roue et compte-tenu de
• Pour un élément soumis à un chargement multi- axial, les composantes de la déformation axiale résultante, peuvent être déterminées par le principe de
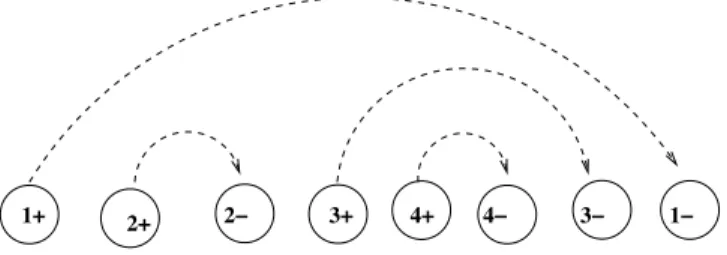
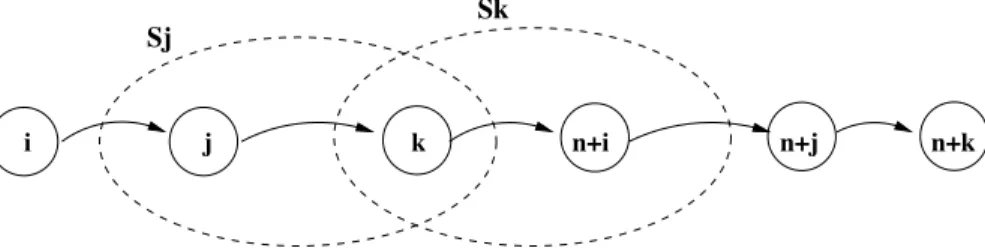
Les arcs uniformes sont construits comme décrit précédemment, et les arcs disjonctifs, i.e., les arcs représentant les contraintes disjonctives, sont construits comme suit : pour
Il est possible d’activer uniquement l’écrouissage isotrope, l’écrouissage cinématique, ou une combinaison des deux.. L’écrouissage cinématique est présent si C est non nul,
Les équations obtenues sont utiles aussi pour vérifier les pertes dans un système plus complexe, comme pour un système hybride, où plusieurs sources de puissance peuvent
En effet, les élém ents de la colonne cim entée ayant une cohésion importante n'entrent pas en plasticité, par contre dès que la colonne pénètre dans les
