HAL Id: pastel-00659814
https://pastel.archives-ouvertes.fr/pastel-00659814
Submitted on 13 Jan 2012HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Caractérisation Biomécanique de la cheville et analyse
de l’équilibre du sujet agé en reprise d’autonomie
Amine El Helou
To cite this version:
Amine El Helou. Caractérisation Biomécanique de la cheville et analyse de l’équilibre du sujet agé en reprise d’autonomie. Biomécanique [physics.med-ph]. Arts et Métiers ParisTech, 2011. Français. �NNT : 2011ENAM0049�. �pastel-00659814�
Arts et Métiers ParisTech - Centre de Paris Laboratoire de Biomécanique
2011-ENAM-0049
École doctorale n° XXX : Texte
T
H
È
S
E
JuryM. Jean-Jacques TEMPRADO, PU, ISM, Université de la Méditerranée Rapporteur M. Fréderic MARIN, PU, JRU, Université de Technologie de Compiègne Rapporteur Mme. Viviane PASQUI, MCF, ISIR, Université Pierre et Marie Curie Examinateur M. Jean-Michel GRACIES, PUPH, Service de Neuroréeducation, GH Mondor Examinateur M. Philippe THOUMIE, PUPH, Service de Médecine Physique et Réadaptation, Hôpital Rothschild Examinateur
M. Philippe DECQ, PUPH, Service de Neurochirurgie, GH Mondor Examinateur
Mme. Wafa SKALLI, PU, LBM, Arts et Métiers ParisTech Examinateur
M. François LAVASTE, Professeur Émérite, LBM, Arts et Métiers ParisTech Invité
Directeurs de thèse : Wafa SKALLI et Philippe DECQ
Doctorat ParisTech
(mémoire provisoire)
T H È S E
pour obtenir le grade de docteur délivré par
l’École Nationale Supérieure d'Arts et Métiers
Spécialité “ Biomécanique ”
présentée et soutenue publiquement par
Amine EL HELOU
le 9 Décembre 2011
CARACTERISATION BIOMECANQUE DE LA CHEVILLE ET
3 Remerciements
Tout d’abord j’aimerai remercier l’agence nationale de la recherche (ANR) pour avoir apporté le financement nécessaire au projet (MIRAS) ainsi que l’institut de robotique de Paris (ISIR) et tous les partenaires du projet (la société Robosfot, le laboratoire LAAS-CNRS, le CHU de Toulouse et le CHU Charles-Foix d’Ivry) grâce à qui le projet porteur de cette thèse a pu voir le jour.
D’autre part, je remercie les membres du jury à commencer par les professeurs Jean-Jacques Temprado et Fréderic Marin pour avoir rapporté sur ce travail, ainsi que tous les membres du jury pour leur participation.
Comme la tradition le veut, cette partie du mémoire est réservée aux remerciements chaleureux envers toutes les personnes qui m’ont suivi de près (ou de loin) et m’ont permis d’accomplir avec succès tous les objectifs fixés dans le cadre de ces travaux.
Sur ce, mes premiers remerciements s’adressent à tout le personnel du service de soins de suite et de réhabilitation gériatrique de l’hôpital Albert Chenevier pour leur amabilité et aide: les kinés, les cadres et les médecins/internes qui ont eu la patience de m’expliquer les termes médicaux et m’ont guidé vers les patients recherchés. Un grand merci au docteur Stéphane Herbaud et à la chef de service Mme. Elena Paillaud qui ont facilité mon immersion en m’introduisant à l’équipe du personnel médical.
Ensuite, je tiens à remercier toutes les personnes du laboratoire d’analyse et de restauration du mouvement de l’hôpital Henri Mondor, à commencer par Jean-Michel Gracies (encore une fois) qui m’a permis de participer à ses consultations et m’a toujours accordé de son temps précieux. Ensuite, le chaleureux personnel et Emilie Hutin qui a mis le plateau technique (et les kinés stagiaires que je remercie du fond du cœur) à mon entière disposition.
Également dans la catégorie des personnes ‘extérieurs’ à mon laboratoire d’affiliation, j’aimerai remercier Damien Hasdenteufel pour m’avoir accueilli dans sa clinique de podologie et Mme. Sylvie Bastuji-Garin responsable du département de santé publique à l’hôpital Henri Mondor pour son expertise en termes de statistiques.
Au sein du LBM, je cite très fort ceux qui ont partagé mon espace vital (entre autre mon bureau), qui m’ont vu (ou pas vu) durant les différentes étapes de la thèse et ont toujours répondu présent à mes besoins.
Je tiens également à remercier le groupe de sujets ‘témoins’ qui m’ont prêté leur corps (et pied surtout!) en acceptant de participer aux différentes études et surtout les patients qui ont accepté de coopérer à l’étude.
D’autre part, le soutien de ma famille à Paris et au Liban, a joué un rôle vital qui m’a toujours motivé à aller de l’avant et traverser toutes les difficultés que j’ai pu rencontrer.
And last but not least, mes directeurs de thèse à commencer par Philippe Decq qui a su me guider sur la bonne voie lorsque j’avais tendance à me ‘disperser’ dans mes pensées scientifiques et Wafa
4 Skalli qui a toujours cru en moi (depuis mon stage au LBM en 2006) et m’a toujours poussé vers l’excellence et la perfection. J’espère que le résultat final est à la hauteur de la confiance qui m’a été accordée.
5
Table des matières
REMERCIEMENTS ... 3
INTRODUCTION GÉNÉRALE ... 7
CONTEXTE PHYSIOLOGIQUE - NOTIONS DE POSTURE ET D’ÉQUILIBRE ... 9
Approche Neurophysiologique et clinique ... 9
Approches Biomécanique ... 11
Réactions posturales et vieillissement ... 13
Intérêt de l’analyse approfondie de la raideur à la cheville ... 15
REVUE DE LA LITTÉRATURE ... 16
Profil de la population âgée en perte d’autonomie ... 16
Raideur de cheville ... 19
Analyse de l’équilibre ... 31
Raideur de cheville et équilibre... 43
Objectifs spécifiques de la thèse ... 46
CHAPITRE 1 - CARACTÉRISATION GLOBALE DE LA POPULATION CIBLE ... 47
Introduction ... 47
Matériels et méthodes ... 47
Résultats ... 51
Discussions ... 56
Conclusions ... 59
CHAPITRE 2 - CALCUL DES PARAMÈTRES INERTIELS DU PIED ... 60
Introduction ... 60
Matériels et méthodes ... 61
Résultats ... 68
Discussion ... 76
Conclusions ... 82
6 Introduction ... 83 Matériels et méthodes ... 84 Résultats ... 91 Discussion ... 98 Conclusion ... 102
CHAPITRE 4 - CARACTÉRISATION BIOMÉCANIQUE DE LA POPULATION CIBLE ... 103
Introduction ... 103
Matériels et méthodes ... 104
Résultats ... 111
Discussions ... 122
Conclusions ... 131
CONCLUSION GÉNÉRALE ET PERSPECTIVES ... 132
LISTE DES TABLES ... 134
LISTE DES FIGURES ... 135
REFERENCES ... 139
ANNEXES ... 152
Modèle de fiche de recueil des données rétrospectives ... 152
Coefficients de variation (CV) des équations de régressions proposées ... 153
Calibration de l’accéléromètre 2 axes (Mega Electronics, Kuopio Finland)... 154
Démonstration de la formule du quick-release ... 159
Calcul de l’accélération angulaire à partir des mesures d’accélérations ... 161
Résultats complets des tests de Quick-Release sur sujet sains ... 164
Calcul de l’inertie du système en mouvement ... 166
Calculs des paramètres stabilométriques ... 171
Corrélations paramètres stabilométriques – facteurs intrinsèques ... 182
Résultats détaillés des paramètres stabilométriques ... 184
7 Introduction générale
Le vieillissement est un processus naturel multifactoriel, qui augmente l’incidence des maladies chroniques et des hospitalisations. Chez les personnes âgées ‘fragiles’, les séquelles de ces épisodes d’alitements contribuent fortement à une perte de l’autonomie et de la mobilité, les rendant plus dépendants à des soins attentionnels et un besoin constant de support familial et social (Buchner 1997; Penson et al. 2004). De plus, le nombre croissant de la population âgée et sa proportion importante dans les pays développés, soulève ce problème de maintien d’une bonne qualité de vie, faisant de la perte d’autonomie un enjeu de santé publique majeur.
En France, 1 personne sur 5 a plus de 60 ans et près de 1/10 plus de 75 ans, et ce chiffre sera multiplié par 2.5 d’ici 2040 (Duée & Rebillard 2006), 40% des sujets âgés hospitalisés sont orientés vers une institution au décours de leur hospitalisation, 50% d'entre eux gardent un handicap définitif et seuls 1/3 récupèrent une autonomie à la marche. Les étiologies de ces hospitalisations au décours desquelles est constatée une perte d'autonomie sont les conséquences des chutes (~ 2 millions par an en France), responsables de fractures de hanches (~ 6.2 millions d’ici 2050 dans le monde (Cooper & Melton 1992)) et les décompensations de pathologies cardio-respiratoires (10 à 20% des sujets de plus de 80 ans ont une condition cardio-respiratoire limitant leurs capacités physiques (Maison et al. 2005; Duée & Rebillard 2006)). Le coût médical des chutes, a été estimé à 1.34 milliards € en 1993 (France (Stepane et al. 1995)), pour un budget global de santé autour des 96 milliards € (i.e. aide au domicile, placement en institution). Aux USA, le coût annuel des soins gériatriques en aigu est estimé à 10 milliards de $ par an (Tinetti et al. 1994). Face à ces problématiques liées au vieillissement qui représentent des enjeux socio-économiques importants, plusieurs verrous scientifiques existent pour les cliniciens et biomécaniciens (i.e. prévoir ou prévenir la chute/fracture, identifier les sujets à risque, proposer des programmes de prévention/réhabilitation efficaces).
Le maintien de l’équilibre en position debout et durant la marche est la capacité fondamentale, essentielle à l’autonomie durant les activités de la vie quotidienne (AVQ). Chez les sujets âgés, le mécanisme principal entrant en jeu dans la perte de l’équilibre est la dégradation du contrôle moteur associé à une réduction de la force musculaire, notamment au niveau des muscles de la cheville (ou fléchisseurs plantaires), où des réductions considérable de force ont été reportés (entre 20 et 40% - (Vandervoort & McComas 1986; Thelen et al. 1996)). Ces muscles sont connus pour leur rôles majeur dans le maintien et la restauration de l’équilibre (Alexander & Bennet-Clark 1977; Horak & Nashner 1986; Gatev et al. 1999) et la propulsion durant la marche (Winter et al. 1990; Judge et al. 1996; Neptune et al. 2001), d’où l’intérêt de les analyser de plus près. Si la situation se dégrade d’avantage, l’utilisation d’aides techniques (tel que les cannes et déambulateurs) devient nécessaire pour empêcher/retarder la dépendance totale et un mode de vie sédentaire aux conséquences encore plus
8 aggravantes. Une meilleure compréhension des mécanismes neuromusculaires affectant l’équilibre et la marche, est importante pour l’identification des sujets à risque d’une part et la mise en place et évaluation d’interventions/traitements efficaces.
Cette thèse se situe dans le cadre du projet ANR-MIRAS (ANR-08-TECS-009-04), visant à la conception et évaluation d’un déambulateur robotisé pour l’aide à la mobilité des personnes âgées en perte d’autonomie. Le projet est divisé en plusieurs parties ou ‘work-packages’. Mon rôle a été d’une part d’assurer la coordination entre les partenaires cliniques (GH Mondor, CHU Charles-Foix et Toulouse) et les développeurs (ISIR-UPMC, Robosoft et LAAS-CNRS) pour la mise en place de l’évaluation clinique et biomécanique du robot. Celui-ci n’étant pas opérationnel encore, l’objectif global de la a thèse été réorienté vers la caractérisation biomécanique des muscles de la cheville et de l’équilibre chez les personnes âgées en reprise d’autonomie.
Dans une partie préliminaire, les notions biomécaniques d’équilibre et de contrôle postural seront rappelées ainsi que l’effet du vieillissement, cela permettra de mettre en évidence l’intérêt d’une analyse focalisée sur l’articulation de la cheville. Ensuite une revue de la littérature identifiera : d’une part le profil de la population en perte d’autonomie, et les différentes méthodologies pour l’analyse biomécanique de la raideur de cheville et de l’équilibre.
A l’issue de cette revue bibliographique, les objectifs spécifiques de la thèse seront clairement définis et les travaux personnels seront exposés comme suit:
• Le premier chapitre porte sur l’identification et caractérisation globale de la population cible, utilisant des aides-techniques pour leur autonomie.
• Le chapitre 2 propose une amélioration simple pour l’estimation des paramètres inertiels du pied, utilisés en routine clinique et indispensables pour le calcul de la raideur musculotendineuse à la cheville.
• Le chapitre 3 porte sur une évaluation de la technique du « Quick-Release » pour le calcul de la raideur, grâce à l’amélioration apportée par le chapitre précédent.
• Le dernier chapitre est consacré à la caractérisation de la raideur de cheville chez une population âgée en reprise d’autonomie et à l’analyse de leur équilibre par une approche stabilométrique détaillée.
Enfin le manuscrit termine par une conclusion faisant d’une part la synthèse générale des résultats obtenus, tout en abordant les apports scientifiques de ce travail.
9 Contexte physiologique - Notions de posture et d’équilibre
La posture représente l’orientation des segments corporels les uns par rapport aux autres et par rapport à la ‘ligne de gravité’ (Figure 1).
Figure 1 - Première figure de l'ouvrage de Borelli (De motu animalium. Bernado, Rome - 1680), figure adaptée de (Sakuta 2007)
L’équilibre quant à lui peut être défini et caractérisé de différentes manières, cependant quelles que soient les approches utilisées; le but ultime de l’être humain dans sa quête de l’équilibre, reste d’empêcher la chute.
Approche Neurophysiologique et clinique
D’un point de vue neurosensoriel, l’équilibre peut être illustré par un ‘cône de stabilité’ (McCollum & Leen 1989, Horak 2006) ayant comme foyer le centre de pression (COP) qui est le point d’application de la réaction du sol sur l’individu. La tâche de l’équilibre est accomplie grâce aux mécanismes de contrôle postural, de façon à ce que le centre de gravité du corps (CG) reste à l’intérieur de ce cône (Figure 2).
10 Figure 2 - Représentation du 'cône de stabilité', figure adaptée de Horak 2006
Le contrôle postural est un processus multi sensoriel continu, pendant lequel le système nerveux central (SNC) intègre plusieurs informations afférentes (Figure 3). Le but du SNC est tout d’abord d’avoir sa propre estimation de la posture et de ce ‘cône de stabilité’, afin de guider le système musculo-squelettique à maintenir ou effectuer l’orientation recherchée pour la stabilité posturale (Massion 1994, Woollacott & Tang 1997).
Figure 3 - Intégration des afférences sensorielles, figure adaptée de (Snijders et al. 2007) Brièvement, le système vestibulaire (récepteurs labyrinthiques de l’oreille interne) fournit des informations sur l’orientation et les accélérations de la tête, qui vont permettre de réguler l’équilibre principalement selon la direction médiolatérale (Horak et al. 1994). Le système somatosensoriel ou proprioceptif est composé par un ensemble de ‘capteurs biologiques’ utilisés par le SNC pour obtenir des informations sur les changements de position des segments (Inglis et al. 1994) et gérer l’équilibre principalement selon la direction antéropostérieure. Parmi ces capteurs proprioceptifs, nous notons: les
11 récepteurs cutanés et capteurs podaux fournissant des repères tactiles (Sherick & Cholewiak 1986); les organes tendineux de Golgi et fuseaux neuromusculaires donnant des informations sur l’état d’étirement du complexe musculotendineux (Crowe & Mathews 1964); les récepteurs articulaires (localisés dans les ligaments et capsules articulaires) avertissant sur l’état angulaire de l’articulation (Skoglund 1956). Plus récemment, la découverte de mécanorécepteurs dans l’artère abdominale (Mittlestaedt 1998, Vaitl et al. 2002) a montré leur rôle de ‘gravicepteurs’ somatiques, donnant l’information sur la verticalité du tronc. La vision joue un rôle majeur grâce aux repères visuel offrant également une perception de la position et vitesse de la tête (Dichgans et al. 1976, Lacour et al. 1997). Ainsi la contribution et intégration de chacune de ces boucles de contrôle (ou feedback) permettent au SNC de détecter les oscillations posturales et générer les patterns moteurs en fonction de la tâche à accomplir; d’où la notion de ‘stratégie posturale’ (Fitzpatrick et al. 1996, Horak 1996, Peterka 2002).
Approche Biomécanique
D’un point de vue biomécanique, l’équilibre représente la dynamique de la posture pour éviter la chute. L’équilibre est accompli tant que la projection verticale du CG (référée en tant que ‘variable de contrôle’ – Winter et al. 2001, Morasso & Sanguinetti 2002) reste à l’intérieur du polygone de sustentation (ou base de support - BOS), délimité par la position des pieds et dans lequel le centre de pression (COP) se déplace également.
Figure 4 - Equilibre biomécanique et polygone de 'sustentation' (BOS)
Cette condition est nécessaire mais pas suffisante, comme l’ont montré plusieurs études récentes d’après lesquelles, même si la projection du CG dépasse les limites du polygone pendant de courts instants, l’équilibre persiste tant que le vecteur vitesse du CG respecte certaines conditions (Pai & Patton 1997, Pai et al. 1998). Une nouvelle vision sur le ‘centre de masse extrapolé’ a même été introduite (Hof 2007, 2008), permettant de prédire à l’avance la position du CG et donc d’imposer de nouvelles conditions d’équilibres.
12 Ainsi, l’approche biomécanique peut se résoudre à la simple étude de l’interaction entre le CG et le COP, et la tactique la plus efficace et la moins coûteuse du point de vue énergétique reste celle du pendule inversé (Gurfinkel 1972, Winter et al. 1995, Gatev et al. 1999). Ce modèle suggère que lors du maintien de la station debout non perturbée, l’homme se comporte comme un pendule rigide oscillant autour de l’axe des chevilles. D’un point de vue mécanique, le pendule est en équilibre si les positions du CG et du COP sont alignées, mais en réalité ce désalignement induit la création d’un couple qui tend à faire basculer le corps. Ce moment est compensé par les muscles abducteurs (de la hanche) dans le plan frontal et par les muscles ‘antigravitaires’ (i.e. fléchisseurs plantaires) dans le plan sagittal. Pratiquement, le COP n'est jamais confondu avec la projection du CG sur le plan du polygone de sustentation, car le corps de l'homme est le plus souvent en équilibre dynamique durant lequel le COP se déplace continuellement de part et d'autre de la projection du CG (Winter et al., 1998): ce sont les oscillations posturales.
La notion de CG étant plutôt abstraite dans la mesure où c’est une variable non directement mesurable, contrairement au COP qui est plus concrète (variable ‘contrôlée’ - Winter et al. 2001, Morasso & Sanguinetti 2002) et mesurable au niveau des voutes plantaires grâce à des plateformes de force (Figure 5). Ainsi, l’analyse des déplacements du COP (ou ‘stabilométrie’) est devenue à elle seule une discipline permettant d’étudier l’équilibre en routine clinique et à des fins de recherche. L’analyse de la position debout (ou ‘station posturale d’aplomb’ (Paillard 1971)) peut être réalisée sous différentes conditions (avec/sans la vue, double-tâche exécutive, feedback visuel du déplacement du COP, sol déformable etc.). Ces tests appelés ‘SOT’ pour ‘sensory organisation tests’, permettent de caractériser l’influence de chacune des afférences sensorielles ainsi que les capacités d’intégration du SNC.
Figure 5 - Illustration d'une analyse stabilométrique avec 'statokinésigramme'
La trajectoire dessinée par le COP (appelée ‘statokinésigramme’) est supposée refléter les perturbations internes et l’action du système de contrôle postural. Ainsi un ensemble de paramètres peuvent être extraits et calculés afin d’évaluer l’efficacité et essayer de mieux comprendre les stratégies posturales d’un individu. Ces paramètres seront rappelés dans la revue de littérature et détaillés en annexe.
13 D’un autre côté, la stabilité de la station debout a été étudiée par plusieurs auteurs (Winter et al. 1998, 2001, Morasso & Schieppati 1999, Loram et al. 2001, Morasso & Sanguinetti 2002), qui en reprenant le modèle du pendule inversé, ont traduit l’équilibre (du pendule) en termes de raideur par la condition suivante:
globale seuil
K ≥K ≈ × ×m g h
Où la ‘raideur seuil’ représente l’inertie du sujet avec m sa masse totale, g l’accélération de la gravité et h la hauteur estimée du centre de gravité (Figure 6).
Figure 6 - Illustration du pendule inversé, contrôlé par la raideur de torsion (Kglobale) - figure
adaptée de Morasso & Schieppati 1999
Donc tant que la raideur articulaire dynamique (ou ‘globale’) à la cheville (Kglobale) est supérieure à la charge du corps, le pendule est en équilibre et l’homme tient debout, soulignant l’importance de la raideur articulaire de la cheville dans l’étude de l’équilibre.
Réactions posturales et vieillissement
Dans l’analyse des réactions posturales, plusieurs auteurs évoquent les notions de contrôle moteur anticipateur (contrôle proactif) aussi appelé ‘fixed-control strategies’ (Nashner 1985, Peterka 2002, Horak 2006). Ces réactions seraient automatiquement amorcées par le système de contrôle postural dans un cadre anticipateur, et deux grandes stratégies ont été identifiées:
14 1. La stratégie de cheville, qui caractérise le comportement en pendule inversé du corps à travers une modulation de la raideur globale, afin d’atténuer le balancement antérieur du corps et assurer l’équilibre dans le plan sagittal (Gatev et al. 1999)
2. La stratégie de hanche, qui permet de minimiser les excursions médiolatérales du CG et assurer l’équilibre dans le plan frontal (Winter et al. 1995)
Entre autre, en condition normale, il existe 2 grandes ‘clés’ pour assurer l’équilibre : la cheville et la hanche.
Vieillissement du système locomoteur
Le processus normal de vieillissement est accompagné par un certain nombre de modifications neuromusculaires. Parmi ces modifications, celles du système sensori-moteur impliqué dans le contrôle de la posture (atteintes ‘périphériques’) seraient la principale cause de détérioration des capacités d'équilibre (Horak et al. 1989, Woollacott 2000): sensibilité cutanée réduite notamment au niveau de la voute plantaire (Whanger et Wang, 1974, Skinner et al. 1984) ; diminution de l'acuité visuelle, (Bohannon et al. 1984) ; réduction de la détection des mouvements des articulations ; et une moindre contribution des afférences proprioceptives musculaires (Skinner et al.1984, Shaffer & Harrison 2007). Le système vestibulaire est également touché par le vieillissement (Woollacott & Tang 1997). En général, la littérature montre que suite aux déficiences proprioceptives et vestibulaires, le sujet âgé aurait développé une dépendance majeure sur la vision pour le contrôle postural (Lord & Menz 200). D’autre part, la capacité d’intégration des signaux multi sensoriels est diminuée au niveau du cerveau, altérant la sélection convenable des informations (Woollacott et al. 1986) et la diminution de la vitesse de conduction nerveuse va retarder les temps de collecte des afférences (i.e. visuelles (Woollacott & Tang 1997) et des réponse/réflexes posturaux. (Dorfman & Bosley 1979). Ces changements dégénératifs peuvent altérer l'équilibre de plusieurs façons (Horak et al. 1989, Alexander et al. 1992) en augmentant les amplitudes des oscillations posturales.
D’un autre côté, la masse musculaire fond progressivement avec la dégénérescence de certaines fibres (le plus souvent de type II) et ce phénomène appelée ‘sarcopénie’ est due en partie à une dégénérescence générale du tissu nerveux (Doherty & Brown 1993). Même si cette diminution du nombre de fibre de type II pourrait être compensée par de l’entrainement physique (Asmussen 1973; Bouisset & Matton 1995), la relation de causalité entre manque d’activité physique et atrophie musculaire reste difficile à établir. Ainsi la réduction de la force musculaire intrinsèque serait la conséquence majeure, due aux effets combinés des modifications de: (i) l'architecture musculaire, (ii) propriétés mécaniques/élastiques des tendons, (iii) conductivité des neurones (plus réduite au niveau des muscles agoniste contrairement aux antagonistes), et (iv) la force élémentaire intrinsèque, développée par chaque fibre. Plus récemment, il a été démontré pour les muscles fléchisseurs plantaires, que les modifications des propriétés mécaniques des tendons, contribuent à la réduction de
15 la force musculaire et que la modification de la raideur des tendons joue un rôle important dans cette diminution (Magnusson et al. 2008; Narici et al. 2008). Pour les muscles de la cheville, on note une diminution du couple max de flexion plantaire (MVC) et des temps de développement de couple (i.e. (Vandervoort & McComas 1986; Thelen et al. 1996; Ferri et al. 2003; Kubo et al. 2008)). D’autre part, une réduction de l’amplitude de mouvement à la cheville a été reportée (Thelen et al. 1996; Mecagni et al. 2000), due à une diminution des longueurs des fascicules et de l’élongation maximale du tendon (quantifiée par imagerie ultrasonique - (Onambele et al. 2006; Kubo et al. 2007)), ainsi qu’une diminution de la vitesse de raccourcissement du muscle à faibles niveaux de couples (Ochala et al. 2004).
Ces modifications au niveau des muscles antigravitaires (Jette et al. 1990) sont compensées par une activité musculaire plus importante en position debout (Laughton et al. 2003). Effectivement, les sujets âgés cherchent activement à augmenter leur raideur globale à la cheville, en sollicitant les muscles antagonistes (‘co-contraction’, Manchester et al. 1989). Cette stratégie d’enraidissement permet de mieux résister et corriger les perturbations transitoires, mais pourrait être désavantageuse (coûteuse en énergie), surtout si des perturbations surviennent à grande vitesse (Cencarini et al. 2010).
Intérêt de l’analyse approfondie de la raideur à la cheville
Chez les sujets âgés, cette faiblesse à la cheville explique la préférence de ces derniers à s’appuyer sur la stratégie de hanche (Judge et al. 1996, Sundernier et al. 1996), suggérant que le système de contrôle postural choisit le moyen le plus sûr pour éviter la chute. Cette stratégie permettant de maintenir le CG au-dessus de la BOS, semble avoir une priorité très élevée avec le vieillissement, au dépend de la stratégie de cheville qui reste de faible coût énergétique.
En d’autres termes, la stratégie de hanche est plus énergiquement onéreuse, mais plus sûre pour les personnes âgés (Lacour et al. 2008), peut être en raison d’une altération de la raideur au niveau de la cheville, ce qui pourrait expliquer la perte d’autonomie si ces derniers subissent une fracture à la hanche.
16 Revue de la littérature
La synthèse bibliographique a porté sur plusieurs volets différents mais complémentaires. Tout d’abord nous avons cherché les informations existantes sur les populations étudiées dans le cadre de la perte d’autonomie. D’autre part sur le plan technique, nous avons précisé les notions de raideur ainsi que leurs méthodes de caractérisation pour l’articulation de la cheville. Ensuite nous avons fait le tour des méthodologies d’analyse de l’équilibre postural, afin d’identifier les paramètres importants, notamment dans le cadre du vieillissement. Puis nous avons cité les études qui se sont intéressés à la problématique du rôle de la raideur à la cheville dans le maintien de l’équilibre.
Profil de la population âgée en perte d’autonomie
La recherche a porté sur les mots-clés suivants : mobilité, autonomie, vieillissement. Comme ces termes sont principalement associés à l’utilisation d’aides-techniques et à la chute, les résultats de la recherche ont systématiquement convergé vers des études (principalement cliniques) portant sur les facteurs de risque (de chute et de fracture de hanche), ou sur l’utilisation d’aides-techniques chez des populations âgées en perte/reprise d’autonomie.
Pratiquement, indépendamment des objectifs des études, nous nous sommes surtout intéressés aux profils et données (démographiques et cliniques) des populations reportées et l’observation a montré que le motif principal de perte d’autonomie dans les populations âgées est la fracture de hanche. En effet (Tableau 1), les chiffres montrent que l'utilisation d'aides-techniques reste importante jusqu’à 6 mois après une fracture: 42% des patients autonome avant la fracture, utilisaient toujours une canne ou un déambulateur (Martolotti et al. 1992, Fox et al. 1996). Des études plus détaillées ont montré que 10% (Mossey et al. 1989) à 20% (Graafmans et al. 2003, Palombaro et al. 2006) des sujets dans une cohorte de patients ayant subi une fracture de la hanche, avaient encore besoin d’un déambulateur à 10-12 mois après la fracture.
Source N Age % F % aide M
Miller et al. 1978 360 73 71 20.6 12 33.0 Mossey et al. 1989 219 78.5±7.6 100 9.7 12 Magaziner et al. 1990 876 78.9 83 74.5 12 Marottoli et al. 1992 120 >65 n.c. 85 6 25 12 Poor et al. 1995 232 >75 0 60 n.c. Fox et al. 1996 252 >65 n.c. 42 6
17 Boonen et al. 199 159 <80 100 30 12 134 >80 100 56 Magaziner J. et al. 2000 674 81.1±7.4 77.4 48.3 12 48 24 Graafmans et al. 2003 694 82.8±5.9 81.1 19.7 n.c. Suriyawongpaisal et al. 2003 250 75.5±9.47 72 14 19 11.2 Lin PC J. 2004 103 >65 n.c. 42 12
Fierens & Broos 2006 1486 >70 n.c. 37 12
Nawata et al. 2006 279 >65 n.c. 20 1.5
14
Palombaro et al. 2006 92 78.7±7.5 70.7 20.6 9.24±16.9
Givens et al. 2008 126 79±8 100 27.8 1
25.4 6
Tableau 1 - Données reportées sur le % de patients nécessitant de l'aide pour tenir debout et marcher après M mois suivant une fracture de hanche
De manière plus synthétique, la revue de littérature a montré que chez un bon nombre de cas de patients âgés, la capacité de maintien d’équilibre et de marche sans assistance, peut être compromise par des conditions/déficiences cardio-vasculaires, respiratoires, neurologiques, métaboliques et/ou musculo-squelettiques (Hochberg et al. 1998). Dans ce contexte, les aides-techniques (i.e. cannes ou déambulateurs) sont souvent prescrits par les professionnels de santé, afin d'améliorer la mobilité/autonomie en toute sécurité ainsi que l'équilibre pour les AVQ (Activités de la Vie Quotidienne) (Joyce et al. 1991), tout en réduisant le risque de chutes (Gosman et al. 1995 , Molaschi et al. 1995). La prescription de ce type d'aide serait souvent une décision arbitraire, basée sur une évaluation subjective des conditions du patient en termes de: son état mental, sa force musculaire, son équilibre, la coordination et surtout l'âge (Pandolf 1975, Scully 1989).
L’utilisation de l’aide-technique peut être transitoire (jusqu'à récupération totale de l’autonomie) ou permanente (utilisation au domicile). Les cannes sont généralement prescrites pour les personnes ayant une altération ‘modérée’ d’autonomie, alors que les déambulateurs sont prescrits pour les cas plus sévères. Ce dernier serait bénéfiques dans plusieurs cas de figures (Verbrugge et al. 1997, Tyson 1998): mauvais équilibre et altération du contrôle moteur suite à des déficiences d’ordre neurologique (Cubo et al. 2003, Constantinescu et al. 2007) permettant d’élargir le polygone de sustentation (Bateni et al. 2005); les patients ayant besoin de soulager l’appui aux membres inférieurs (Holder et al. 1993, Williamson et al. 1998). Également, en cas de faiblesse/fatigue, des études ont montré les bénéfices dans le cas de maladies cardio-respiratoires (Solway et al. 2002, Probst 2004) ou les chutes (Hogue 1984).
18 Cependant, il existe un bon nombre d’études ayant exposés les probables inconvénients liés à l’utilisation du déambulateur: dépenses d'énergie élevées (Foley 1996), risque accru de chutes (Charron et al. 1995) et altérations des patterns cinématiques de la marche (Liu et al. 2009). D'autre part, puisque le processus de récupération dépend fortement de l'état moral du patient (Fredman et al. 2006), l'utilisation des aides-techniques a également été liée à des facteurs psychologiques, tels qu’une mauvaise perception propre de l'état de santé (et non la peur de chuter) (Andersen et al. 2007), les patients se sentant plus en sécurité avec le déambulateur (Gupta et al. 2006). En outre, certaines études concernant les aides robotisées (Rentschler et al. 2008), n'ont pas montré de résultats concluants sur de petits échantillons de patients utilisateurs ayant des troubles élevés de l’équilibre avec déficiences visuelles.
Synthèse
Cette partie nous a permis d’avoir quelques éléments de réponse sur les caractéristiques des personnes âgés en perte d’autonomie. Les informations relevées indiquent que ce phénomène pourrait être associé aux facteurs suivants : fracture de hanche, difficultés respiratoires, troubles de l’équilibre, troubles de la vision ou état psychologique (i.e. dépression). La prévalence du nombre de femmes dans les populations était également importante. Cependant, même si des indicateurs de risques pour la fracture de hanche ou la chute ont été identifiés, aucune étude n’a clairement établi un lien entre ces facteurs et la perte d’autonomie (traduite par un besoin d’utiliser une aide-technique).
D’autre part, les études ont signalé que la perte d’autonomie (à court terme, lors d’utilisation temporaire d’aides techniques) serait liée à l’alitement prolongé lors des épisodes d’hospitalisation. Ainsi dans la partie qui suit, nous avons prêté attention aux effets de l’alitement sur l’appareil neuromusculaire.
Effets de l’alitement sur l’appareil neuromusculaire
Les simulations de situations d’alitement/hypoactivité ont été réalisées de différentes manières chez l’homme: alitement horizontal, immobilisation par plâtre ou suspension unilatérale de la jambe. Beaucoup d’études ont aussi été réalisés sur des cosmonautes en faisant des comparaisons pré/post vol spatial (i.e. missions de la station orbitale Russe MIR ou le projet spatial américain Skylab). De manière générale et quel que soit le muscle étudié, une atrophie musculaire a toujours été reportée et les résultats publiés suggèrent qu’un remodelage de l'architecture musculaire survient rapidement dans les 14 premiers jours (Seynnes et al. 2008). Cette atrophie se caractérise globalement par une diminution de l’aire de section physiologique (CSA), due à une réduction du diamètre des fibres. Une atrophie préférentielle des muscles antigravitaires est généralement observée dans les premiers jours et ce phénomène est accompagné d’une réduction de force, partiellement compensée par une augmentation accrue de la vitesse de raccourcissement des fibres. L’absence de charge gravitaire causerait une réduction de la synthèse des protéines contractiles (myosine), ce qui explique la
19 diminution de la force, tandis que la perte en filament mince d’actine (Riley et al. 2000) peut expliquer l'augmentation de la vitesse maximale de raccourcissement dans les fibres de type I et Ia (Widrick et al. 1999; Lambertz et al. 2001). Ces résultats ont été corroborés par l’augmentation des myosines de type ‘rapide’ dans les fibres lentes (appelés fibres ‘ hybrides’ Ia) et des fibres rapides de type II (Fitts et al. 2000). Dans une étude plus récente, une diminution de 5% des longueurs des fascicules et de 14% des angles de ‘pennation’ ont été relevés dans le groupe musculaire des jumeaux (ou gastrocnémiens) après 5 semaines de suspension (de Boer et al. 2008).
D’autre part, le contrôle moteur est affecté par une réduction de la vitesse de conduction de l’influx nerveux (Koryak 1998) et du recrutement des unités motrices (Antonutto et al. 1999). En effet, les durées des ‘bouffées’ des signaux d’activités musculaires électriques (ou électromyogrammes – EMG) des muscles fléchisseurs plantaires (soléaire et jumeaux) diminuent (Recktenwald et al. 1999). Cette réduction de l’activité EMG (Seynnes et al. 2008) serait due à un relâchement précoce des ponts d’actine-myosine (Riley et al. 2000) et indique une réorganisation du recrutement des fibres musculaires (rapides au dépend des fibres lentes).
Un tableau de synthèse (Tableau 2) reporte les diminutions (en %) pré/post microgravité de l’aire de section physiologique (CSA) des muscles fléchisseurs plantaires et du couple maximal développé (en flexion plantaire).
Source N Age T (jours) Type CSA MVC
Gogia et al. 1988 15 (M) 21-54 35 Alitement -25%
LeBlanc et al. 1988 9 (M) n.c. 35 Alitement -12% -26%
Convertino et al. 1989 8 (M) 31-45 30 Alitement -5%
LeBlanc et al. 1992 9 (M) n.c. 119 Alitement -26%
Koryak et al. 1998 n.c. n.c. 7 Vol spatial -34%
Lambertz et al. 2001 10 (M) n.c. 90-180 Vol spatial -17%
Seynnes et al. 2008 8 -M n.c. 23 Suspension -9% -10%
Tableau 2 - Effets de l'alitement sur l'aire de section physiologique (CSA) des fléchisseurs plantaires et couple max volontaire de flexion plantaire (MVC)
Les chiffres sont dispersés car les conditions (et durées) des situations de microgravités sont différentes entre les études, limitant les comparaisons (i.e. les cosmonautes dans l’étude de Lambertz (2001) s’exerçaient régulièrement sur un vélo lors de la mission). Néanmoins, une réduction de force et de masse musculaire est observée dans toutes les études.
Raideur de cheville
Les notions de raideurs articulaires sont différentes entre les mécaniciens et les cliniciens pour qui la raideur est plutôt associée à une rétraction des longueurs musculaires, secondaire à des phénomènes
20 physiologiques tels que la spasticité (ou hyperexcitabilité du réflexe à l'étirement) ou la ‘co-contraction’ (définie comme une anomalie de la commande motrice entraînant une activation simultanée des muscles agonistes et antagonistes autour d'une articulation donnée). Tous ces phénomènes entraînent des réductions d’amplitudes de mouvements, et dans le monde clinique d'une part par les amplitudes de mobilisation passive des articulations, et d'autre part la raideur est évaluée à l’aide d’échelle de mesure de la spasticité (i.e. échelle de Tardieu (Tardieu & Tardieu 1981)).
D’un point de vue biomécanique, la notion de raideur articulaire ‘globale’ ou raideur dynamique, correspondt à la résistance au mouvement de l’articulation. Mécaniquement parlant, le calcul de cette raideur angulaire globale correspond au rapport entre une variation de couple/moment (T) et une variation d’angle (Ɵ) – (Winter et al. 2001; Kuitunen et al. 2002)); ce qui est assimilable au comportement d’un ressort de torsion :
globale
T
K
=
∆
∆
θ
Équation 1
Pour la caractériser les approches par analogies au pendule inversé sont appliquées généralement à l’aide d’une plateforme de force et/ou d’analyse du mouvement (i.e. Winter et al. 1998), ou par le montage de dispositifs expérimentaux (i.e. Fitzpatrick et al. 1992, Loram et al. 2001), permettant d’obtenir une mesure de l’angle et du couple développé à la cheville (i.e. Figure 7). Néanmoins, cette formule (Équation 1) n’est vraie que dans le cas où le système (l’articulation) a un comportement strictement linéaire avec une variable d’entrée (T) et une de sortie (Ɵ), ce qui n’est pas le cas des articulations du corps humain. En effet, plusieurs structures (Fitzpatrick et al. 1992; Carpenter et al. 1999; Morasso & Sanguineti 2002) interviennent dans l’articulation et contribuent à cette raideur globale, parmi lesquels on note: les élasticités élémentaires des tissus musculaires, les aponévroses, le(s) tendon(s), les ligaments, le liquide synovial, la capsule articulaire, la peau. Le tonus musculaire (actif et passif), régulé par le système de contrôle postural et l’activité réflexe, contribue également au développement de cette raideur. Cependant, le rôle de chacun des composants reste difficile à isoler, mais peut être quantifiable in vivo grâce à des modélisations et outils/techniques de mesures faisant appels à des hypothèses simples.
21 Figure 7 - Exemple des montages proposés par: Fitzpatrick (1992) gauche et Loram et al.
(2001) droite
Les limites de tels dispositifs est tout d’abord liée à leur difficulté de montage, d’autre part ces approches donnent une mesure de la raideur articulaire dynamique ou globale et comme mentionné précédemment, la notion de raideur globale reste floue quant à la contribution et part de chaque composant et boucle de contrôle. D’autre part, les valeurs de raideurs mesurées dépendent de l’amplitude de mesure des angles à la cheville et des perturbations imposées (Kearney & Hunter 1982, Loram et al. 2004). Ceci rendrait difficile l’application de cette approche à des sujets âgés présentant des conditions comme celles identifiées ci-dessus. A noter également que la notion de pendule inversé a été controversée quant à son application au sujet âgé (pathologique), qui utiliseraient peu la stratégie de cheville (i.e. Jette et al. 1990, Judge et al. 1996, Nardone & Schieppati 2010).
La diversité des structures et mécanismes entrant en jeu dans l’articulation, a conduit à la définition de plusieurs types de raideurs et de méthodes permettant de les caractériser. Dans un premier lieu, en écartant les échelles de mesures cliniques de la raideur, un bref rappel du modèle musculaire le plus utilisé est nécessaire.
Rappel: Modèle mécanique à 3 composantes
Quand il s’agit de caractériser le comportement mécanique in vivo, le modèle conceptuel de Hill à 3 composantes (Hill 1950), reste le plus répandu (Figure 8). Son avantage principal est qu’il permet de distinguer entre les diverses propriétés élastiques du muscle.
22 Figure 8 - Modèle de Hill modifié par Shorten (1987)
La composante contractile (CC) est le générateur de force, résultante des déplacements des ponts entre les têtes d’actines et myosines. Cette force générée est transmise de manière élastique à l’articulation à travers la composante élastique série (CES), qui a donc un rôle de stockage et restitution d’énergie. La CES comprend une partie active lié aux élasticités élémentaires des ponts d’actine-myosine et des myofibrilles lors de la contraction, et une partie passive liée au tendon et tissu conjonctif (Huxley & Simmons 1971). Ainsi la vitesse de montée en force du muscle dépend de la raideur/souplesse de la CES (Figure 9)
Figure 9 - Gauche (figure adaptée de (Herzog & Nigg 1994)), montrant que la pente de la relation force-longueur d’un muscle pour une CES plus raide (‘stiff’) est plus élevée; Droite
(figure adaptée de (Narici et al. 1996)), montrant qu’avec stimulation électrique, le couple maximal est atteint plus tôt pour une CES plus raide
Finalement, la composante élastique parallèle (CEP) intervient uniquement lorsque le muscle au repos est en état d’étirement par rapport à sa longueur initiale. Elle englobe le sarcolemme, le fascia, et
23 les interactions résiduelles entres les protéines contractiles (Titine, Nébuline, Désmine (Horowits et al. 1986)).
En pratique, plusieurs types de raideurs ont été définis et peuvent être quantifiables in vivo.
Raideur musculotendineuse
La raideur musculotendineuse (Goubel & Pertuzon 1973), est calculable au niveau d’un groupe musculaire (i.e. muscles fléchisseurs plantaires, extenseurs du coude). Elle caractérise la raideur de la CES dans sa globalité (parties active et passive) et prend en compte le comportement de l’aponévrose (Magnusson et al. 2003). Les rôles élémentaires de la CES sont variés: atténuation des effets brusques de la contraction sur les structures articulaires, stockage et restitution ou dégradation d’énergie mécanique (Bouisset & Matton 1995). Ce processus de stockage intervient lorsque l’exécution d’un mouvement nécessite une courte phase de ‘pré-étirement’ automatiquement suivie par une phase de raccourcissement du muscle (cycle ‘étirement-détente’). Ceci permet une amélioration du rendement tant que les deux phases se succèdent rapidement (Bosco et al. 1982), sinon l’énergie stockée se dissipe sous forme de chaleur. On retrouve ce phénomène dans différents mouvements simples ou complexes: micro-oscillations en position debout, marche, course et mouvements sportifs.
De manière générale, les muscles ‘antigravitaires’ (i.e. fléchisseurs plantaires) sont mis sous tension lorsque le membre inférieur est en charge. Lors des oscillations posturales, la CES aura pour rôle de transmettre efficacement l’énergie élastique de déformation (du muscle) à l’articulation (Alexander & Bennet-Clark 1977; Shadwick 1990), pour maintenir l’équilibre.
La caractérisation de cette raideur se fait à l’aide de techniques de ‘détentes-rapides’ ou ‘Quick-Release’ (Goubel & Pertuzon 1973; Pousson et al. 1990), réalisées à l’aide d’ergomètres (i.e. Figure 10). Le principe de cette technique est d’isoler l’articulation et soumettre le groupe musculaire à un cycle d’étirement-détente. Cela a tout d’abord été appliqué pour l’articulation du coude, puis de la cheville (Mainar et al. 1995), ensuite du poignet (Cornu et al. 2003) et même récemment pour le cou (Portero et al. 2011).
Figure 10 - Illustration d'un montage de détente rapide pour la cheville (figure adaptée de (Rosager et al. 2002))
24 Le principe est de contraindre le mouvement de l’articulation et solliciter le muscle en contraction isométrique, à sa longueur initiale (L) afin d’écarter l’intervention de la CEP (Figure 11).
Figure 11 - Comportement macroscopique du muscle lors d'une contraction isométrique Durant cette contraction, les longueurs des fascicules (entre autre la CC) vont diminuer au dépend des tendons et éléments élastiques (CES) qui vont s’étirer (phase 1 et 2 - Figure 12). La phase de relâchement consiste à libérer subitement l’articulation (phase 3 - Figure 12). Pour la cheville, si le genou est en position fléchi (90° de flexion), les muscles gastrocnémiens médial et latéral (ou jumeaux internes et externes) ne sont pas sous tension et seul la contribution du soléaire est prise en compte.
Figure 12 - Illustration mécanique du déroulement d'un cycle étirement-détente lors d'un test de quick-release – Dans ce schéma on distingue la composante contractile (CC) illustrée par un amortisseur qui se compresse lors de la phase de contraction et la composante élastique série
(SEC) illustrée par un ressort
L’hypothèse du quick-release suppose que le mouvement du segment osseux après relâchement, est uniquement due au raccourcissement de la CES qui se comporte comme un ressort. La raideur de ce ressort est mesurable à l’aide d’une formule simple :
25 max
;
MTT
S
I
θ
I
θ
θ
∆
= ×
=
∆
ɺɺ
ɺɺ
Où SMT est la raideur musculotendineuse, I le moment d’inertie extrapolé du système (pied-pédalier), T la mesure du couple avant le relâchement du pédalier,
θ
ɺɺmax l’accélération angulaire maximale enregistrée,∆
θ
et ∆θ
ɺɺ les variations d’angles et d’accélérations angulaire sur une durée de 15-20ms suivant le pic d’accélération. Généralement, l’ergomètre est équipé d’un capteur de force et de position du pédalier et l’accélération angulaire est obtenue par double dérivation et filtrage du signal angulaire.Cette formule est valable en supposant les hypothèses suivantes durant le court instant suivant le relâchement:
• Pas d’intervention des muscles antagonistes
• Pas de raccourcissement de la CC
• Pas de friction dans l’articulation
Ainsi le mouvement du segment osseux caractériserait le comportement global de la CES et de l’aponévrose.
Raideur musculoarticulaire
La raideur musculoarticulaire est également calculable pour un groupe musculaire et prend en compte le comportement globale de la CES mais également des structures environnantes de l’articulation: ligaments, liquide synovial, friction articulaire (congruence des surfaces) et la peau. Cette raideur caractérise le comportement du muscle et de l’articulation lorsque cette dernière est soumise à des perturbations (Hunter & Kearney 1982; Shorten 1987). Pour la quantifier, des équipements d’isocinétisme composés de bras/pédale mobiles commandés sont utilisés. Le but est de soumettre l’articulation (i.e. genou ou cheville) (Figure 13) à des perturbations sinusoïdales de position pendant que le sujet relâche son articulation (mesure passive) ou s’oppose au mouvement en développant une force/couple constant (mesure active) (Hunter & Kearney 1982). Cette raideur est extraite de la résolution d’une équation différentielle du 2nd ordre caractérisant le comportement de l’articulation lors des perturbations. Cette équation comprend une composante inertielle I, visqueuse B et élastique SMA -C t( )= ×I
θ
ɺɺ( )t + ×Bθ
ɺ( )t +SMA×θ
( )t ) avec C(t) la valeur de couple mesurée.26 Figure 13 - Exemple d'ergomètre de cheville pour de l'isocinétisme (figure adaptée de
(Ochala et al. 2004))
Cependant ce type d’équipement coute relativement cher et présente quelques limites techniques: par exemple si les segments des articulations sont maintenues horizontalement lors des expérimentations, alors les données mesurées sont uniquement dues à l’inertie des composantes en mouvement (Robinson et al. 1994). D’autre part, le protocole ne serait pas très adéquat à notre population cible, dans la mesure où le maintien d’un(e) couple/force constant(e) sur une durée prolongée serait assez difficile pour un sujet âgé, d’autant plus que les amplitudes de mouvement aux articulations sont également réduites et cela pourrait biaiser les résultats (Kearney & Hunter 1982). Quant à la mesure passive, elle ne présente aucun intérêt dans l’étude de l’équilibre, car elle est indépendante de l’élasticité du tendon et n’aurait aucune relation avec le développement de force durant un cycle d’étirement-détente (Kubo et al. 2001).
Raideur musculaire ou tendineuse
Cette raideur est évaluée à l’échelle d’un seul muscle (ou tendon) et se fait de manière locale à l’aide de technique d’imagerie ultrasonique (Fukunaga et al. 2001; Kubo et al. 2001) en condition de contraction isométrique. Sur les images, un ensemble de points sont identifiés et leur déplacement est suivi et quantifié en fonction du temps (Figure 14).
Figure 14 - Illustration d'un suivi de points par imagerie ultrasonique (figure adaptée de (Kubo et al. 2002)) – MVC : Couple maximale volontaire
27 La raideur est ensuite calculée comme pente de la relation force-déplacement. Et concernant l’effet de l’alitement, des études utilisant cette approche, ont reporté une augmentation de 30% du déplacement maximal du complexe musculotendineux suivant une contraction (Seynnes et al. 2008), attribuable à une diminution de la raideur des muscles (partie active de la CES) et des tendons (-36% après 23 jours d’alitement, Pisot et al. 2008).
Ces approches nécessitent des équipements d’imagerie ultrasonique, qui sont utilisés lors d’une contraction isométrique du muscle en position couchée (i.e. Kubo et al. 2002) ou érigée (Loram et al. 2005a) du sujet. Les informations obtenues (i.e. courbe force-déplacement) sont précises mais décrivent le comportement du tissu musculaire à l’échelle locale uniquement (fibres musculaires ou partie de tendon visibles en fonction de la sonde utilisée) et ne peuvent être généralisable à l’échelle du muscle entier, d’autant plus que seul les muscle superficiels peuvent être explorés. Par rapport à notre population cible, cette approche présente quelques limites, car d’une part le galbe des sujets âgé est souvent plissé, ce qui peut compliquer le déplacement de la sonde; mais aussi la déshydratation et la sarcopénie compromettrait la clarté des images.
Ainsi, nous nous sommes intéressés par la suite, uniquement aux méthodes de caractérisation de la raideur musculotendineuse à la cheville par approche de détente-rapide ou «Quick-Release». L’intérêt de cette méthode réside tout d’abord du fait de sa simplicité de mise en œuvre, plus adaptée et applicable aux sujets âgés. Et actuellement des ergomètres transportables existent, permettant un accès assez rapide aux données de raideurs (Lambertz et al. 2008).
Revue des méthodes de détente-rapide ou « Quick-Release »
Les premières publications sur les méthodes de détente rapide ont été proposées par les équipes de l’université de technologie de Compiègne pour l’articulation du coude (Goubel 1973, Pousson et al. 1990), puis l’articulation de la cheville (Mainar et al. 1995, Tognella et al. 1997). Des ergomètres ont été proposés pour effectuer des mesures de Quick-release en position assise du sujet. Une synthèse des premières consignes expérimentales a ensuite découlé :
• Contrôle de l’activité antagoniste/reflexe par des mesures EMG.
• Seuil minimal de couple de flexion plantaire correspondant à 25% de la MVC (Tognella et al. 1997), car pour de faibles niveaux d’activation musculaire (<20% de la MVC) des sources de bruits non négligeables pourraient biaiser les signaux: friction résiduelle du pédalier, le mouvement des tissus mous, la force antagoniste, l’inertie du pédalier et le possible raccourcissement de la CC.
28 Puis Hof (1997a) a proposé un ergomètre pour des tests en position debout du sujet, avec une mesure directe de l’accélération angulaire (à travers un accéléromètre). Et va également imposer des directives :
• Rigidifier l’interface pied- pédalier (pas de mouvements relatifs, i.e. décollement du talon).
• Alignement des axes de rotations (cheville-pédalier).
• Répétition des mesures par niveau de couple (minimum 3 répétitions).
• Masse réduite des matériaux composant le pédalier.
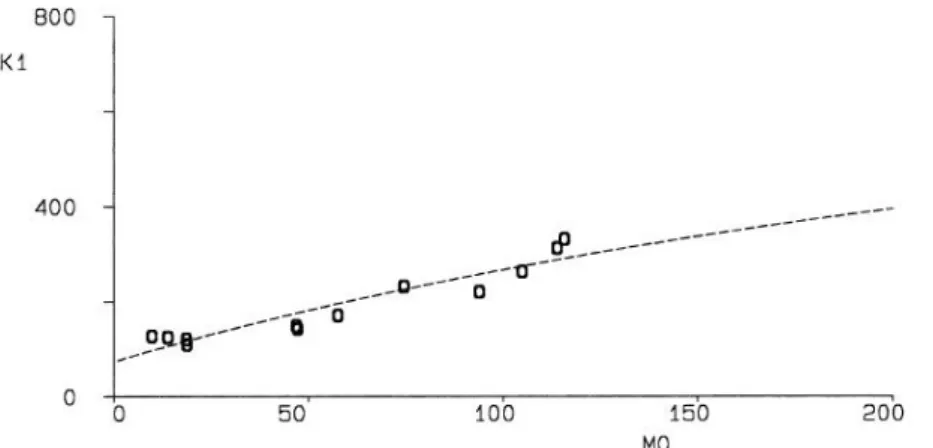
Il va aussi proposer une méthode de correction de l’inertie extrapolée, en recommandant d’avoir une connaissance à priori du moment d’inertie du pédalier (Hof 1997b) et raffiner l’approche en dissociant l’éventuel effet de raccourcissement de la CC. La notion de ‘release-curve’ (Figure 15) a ensuite été introduite, caractérisant la dépendance entre raideur musculotendineuse et niveau de couple.
Figure 15 - 'Release-curve' de Hof (1998), K1: raider musculotendineuse; M0 : couple/moment de flexion plantaire à la cheville
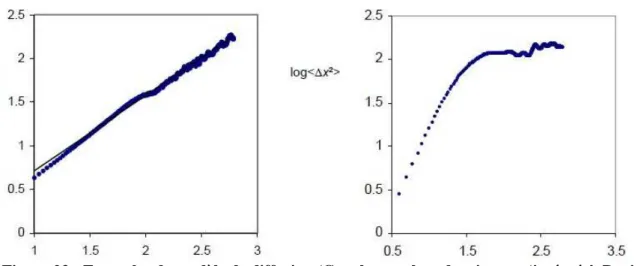
Puis de Zee et Voigt (2001) ont réexaminé la méthode de Hof (1997a, b) en proposant également des corrections du moment d’inertie, du raccourcissement de la CC et de l’éventuelle contribution de la CEP (la cheville étant initialement à 10° de flexion dorsale). Ils obtiennent une ‘release-curve’ comparable à celle de Hof (1998) (Figure 16).
29 Ces auteurs émettent des doutes par rapport à la plausibilité des mesures et suggèrent que la méthodologie du «Quick-release» manque de vérification et nécessite des raffinements. A la lumière de ces résultats, la notion d’indice de raideur (ou ‘stiffness index’ - SIMT) a été proposé par les équipes de Compiègne (Lambertz et al. 2001, 2003a, 2003b), en tant que pente de la droite de régression linéaire entre valeurs correspondantes de couple et de raideurs (Figure 17). Du point de vue mécanique, cet indice est un indicateur de ‘linéarité’ de la raideur en fonction du couple, entre autre il indique la capacité du sujet à moduler sa raideur avec la variation de force développé. L’avantage de ce paramètre est qu’il permet de mieux comparer des populations en écartant l’influence de facteurs tels que la force max ou l’architecture du muscle du sujet (i.e. aire de section physiologique et angles de ‘pennation’ des fibres).
Figure 17 - Exemples des droites de régressions raideur-couple pour 2 sujets enfants pré pubères (Lambertz et al. 2003b).
Récemment, un ergomètre transportable a été proposé (Lambertz et al. 2008), où le poids de tous les composants a été réduit afin de minimiser les effets inertiels (Figure 18).
30 La validation du dispositif a été établie en démontrant la répétabilité des mesures de raideur et l’invariance du moment d’inertie extrapolé avec les niveaux de couple, même si ce dernier était en réalité sous-estimé (par rapport à la valeur réelle de l’inertie du système pédalier-pied).
Plus récemment, une méthode (‘alpha-method’) a été reprise pour la caractérisation différenciée des parties actives et passives de la CES (Fouré et al. 2010), mais l’approche est différente des approches cités ci-dessus, dans la mesure où le pied est sollicité vers la flexion dorsale (-20°) et ce en utilisant un dispositif d’isocinétisme.
Une synthèse des études de « Quick-Release » publiés sur la cheville est présentée dans le tableau ci-dessous (Tableau 3) :
Source N Sexe Age Position genou Position cheville Objectif de l’étude
Hof 1998 12 M 34 180° -15° Note technique
De Zee & Voigt 2001 10 M 33(6) 110° -10° Note technique
Lambertz et al. 2001 14 M X 120° 0 Effet du vol spatial
Lambertz et al. 2003a 28 16(F) 7-10 120° 0 Effet de la pré-puberté
Lambertz et al. 2003b 12 M X 120° 0 Effet du vol spatial
Ochala et al. 2004a 11 M 61-74 90° 0 Effet du vieillissement
Ochala et al. 2004b 28 13(F) 77 120° 0 Différence M/F
Ochala et al. 2007 26 13(F) 77 120° 0 Effet de l’entrainement
Lambertz et al. 2008 7 M 25(2) 120° 0 Note technique
Rabitta et al. 2008 9 M 24(4) 90° 0 Effet de l’entrainement
chez les sportifs
Grosset et al. 2009 30 M 21(1) 120° 0 Effet du type
d’entrainement Tableau 3 - Synthèse des études utilisant du "Quick-Release"
La microgravité a montré une augmentation de 25% de l’indice de raideur musculotendineuse et diminution de 21% de la raideur musculoarticulaire passive chez des cosmonautes (après 90-180 jours en microgravité). Ces résultats suggèrent qu’une diminution de la raideur passive, est compensée par une augmentation de la raideur active (Lambertz et al. 2001, 2003b) ; entre autre l’augmentation de la souplesse des structures élastiques est compensée par un changement des seuils d’activations
musculaires. Sinon le tableau montre que peu d’études comparatives ont été réalisées sur sujets âgés, à part celles d’Ochala et al. (2004a) sur 11 sujets âgés sains et sédentaires (vs. 12 sujets jeunes de contrôle), reportant un indice de raideur musculotendineuse nettement plus élevé avec l’âge (+55%).
31
Synthèse
Les discussions sur la méthodologie du «Quick-release» ont toujours tourné autour du calcul de l’inertie du système en mouvement, car le calcul de la raideur se base fortement sur ce paramètre. En réalité, l’inertie opposée au mouvement par le pédalier mobile et le segment du pied, empêchent le raccourcissement instantané des éléments élastiques lors de la phase d’accélération, puis contribue au mouvement lors de la décélération. De plus, le risque d’étirement ou raccourcissement de la CC (Pousson et al. 1990), peut toujours survenir pendant le relâchement surtout à faibles niveaux de contractions. Même si certains auteurs (Hof 1997b, 1998 ; de Zee & Voigt 2001) ont proposé des méthodes permettant des corrections de ces 2 facteurs, leurs dispositifs expérimentaux sont difficiles à reprendre, en effet, à notre connaissance aucune étude n’a repris leurs modèles étant donné le doute qu’ils ont émis sur la méthode. Dans les études publiées par les équipes de Compiègne, aucune vérification sur le moment d’inertie n’est établie, à part dans l’étude de Lambertz (2008) où le moment d’inertie était minimisé, et la validité des résultats reposait sur la répétabilité des mesures et le fait que le moment d’inertie calculé restait constant quel que soit le couple mesuré. D’autre part, d’un point de vue application, aucune étude n’a été réalisée sur des populations gériatriques (>75ans) ayant des troubles d’équilibres.
Même si sur le principe, l’application de cette méthode à la population cible semble envisageable, il n’en demeure pas moins qu’une vérification des calculs reste à l’ordre du jour (de Zee & Voigt 2001). Entre autre, en écartant la possibilité d’une étude de reproductibilité sur sujet âgé, la validité des mesures requiert inéluctablement une vérification du moment d’inertie extrapolé, par comparaison avec des mesures de ‘référence’. Cette vérification nécessite en amont d’avoir une estimation précise du moment d’inertie du pied.
Analyse de l’équilibre
La quantité d’études publiées utilisant des approches de stabilométrie sur sujet jeune ou âgé, est très consistante. Certaines d’entre elles s’adressent à diverses pathologies et suggèrent que cette approche reste un outil clinique utile pour évaluer les troubles de l’équilibre, mais la sensibilité des paramètres quant à leur signification ‘clinique’, restent au cœur des débats (Chiari et al. 2000, Lacour et al. 2008, Rougier 2008, Visser et al. 2008, Nardone & Schieppati 2010, Chaudhry et al. 2011). En effet, peu d’études ont permis d’expliciter les paramètres les plus significatifs, permettant de distinguer des groupes/pathologies et conditions d’expérimentations (Maurer & Peterka 2005). Ainsi la première partie de cette revue de littérature s’est focalisée sur les limites techniques reportées de la stabilométrie et des paramètres extraits. La deuxième partie, s’est adressée aux études les plus citées portant sur des populations âgées (saines et pathologiques). Les objectifs étant de guider au mieux notre choix de protocole et conditions d’acquisitions d’une part, ainsi que la sélection des paramètres appropriés pour l’étude à mener.
32 La littérature a tout d’abord montré que les paramètres stabilométriques peuvent être classifiés en 3 grandes catégories:
1. Les paramètres/scores ‘statistiques sommaires’ (ou SSS), issus de l’étude des signaux temporels (‘stabilogramme’) et du ‘statokinésigramme’, sont de simples descripteurs uni variés des oscillations posturales (Gagey 1991, Prieto et al. 1996)
2. Les paramètres fréquentiels, dérivés de l’étude des spectres fréquentiels, par transformée de Fourier des signaux recueillis (Prieto et al. 1996) ou d’une analyse en ondelettes (Dimitrescu & Lacour 2004).
3. Les paramètres stochastiques, extraits d’une analyse fractale des stabilogrammes et qui permet d’analyser la dynamique du COP (Collins & De Luca 1993 ; Rougier 1999 ; Delignères et al. 2003)
Limites techniques et choix de paramètres stabilométriques Paramètres de stabilométrie ‘traditionnels’
Tout d’abord au niveau des paramètres ‘statistiques sommaires’ (SSS) et fréquentiels (Prieto et al. 1996), les paramètres de vitesses de déplacement du COP auraient permis de distinguer entre des groupes de sujets sains et pathologiques et de relever les effets de la vision (i.e. dans l’étude du Parkinson, Maurer et al. 2003; des neuropathies périphériques, Horak et al. 2002 ; ou de l’instabilité chez les sujets âgés, Maki et al. 1990). Aussi, les mesures d’amplitudes selon la direction médiolatérale seraient également de bons indicateurs de troubles de l’équilibre chez les sujets âgés (Piirtola & Era 2006). Cependant, ces paramètres (SSS) seraient sensibles à la fréquence d’échantillonnage et la durée des mesures (Carpenter et al. 2001, Rougier 2008), par exemple la longueur totale parcourue, la vitesse de déplacement et la surface du ‘statokinésigramme’ augmenteraient avec la durée et fréquence d’échantillonnage (Granat et al. 1990, Raymakers et al. 2005). D’autre part, il existe des différences inter et intra individuelles importantes de ces mesures (Visser et al. 2008, Nardone & Schieppati 2010) dues à des variabilités du ‘statokinésigramme’ (i.e. Figure 19).
33 Figure 19 - Variabilité des 'statokinésigrammes' d'un même sujet sain jeune (Chaudhry et
al. 2011)
Ainsi, les résultats ne seraient adéquats que si moyennés sur plusieurs acquisitions (i.e. plus de 5 essais de 60s chacun, Doyle et al. 2008), étalées sur plusieurs jours (Santos et al. 2008). Favorablement, il s’est avéré que les sujets âgés (sains) sont convenablement répétables au niveau des mesures stabilométriques, sauf pour les paramètres surfaciques (Lin et al. 2008, avec 3 mesures par session et 4 sessions sur une semaine).
D’un autre côté, l’étude des paramètres fréquentiels se fait sur le signal de densité spectrale de puissance. Afin de le calculer, la transformé de Fourier discrète (FFT, i.e. Figure 20) est généralement appliquée aux signaux de déplacements du COP, mais la FFT présente quelques limitations majeures (Lacour et al. 2008): la précision dans les basses fréquences est limitée par la durée de l'enregistrement et dans la gamme de haute fréquence par la fréquence d'échantillonnage. C’est pourquoi il a été suggéré d’avoir une durée minimum d’acquisition de 20 secondes, afin d’avoir un spectre représentatif (Caroll & Freedman 1993).