Detecting interference through graph reduction
Texte intégral
Figure
Documents relatifs
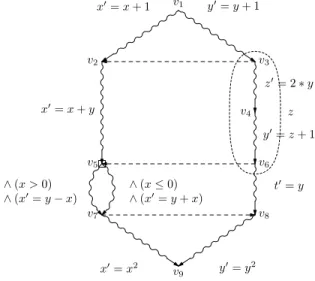
In this paper, we give a formal statement which expresses that a simple and local test performed on every node before its construction permits to avoid the construction of useless
الخــاتمة العامــة : يتضق مف خالؿ دراستنا لموضوع االنعكاسات المرتقبة عمى انضماـ الدوؿ النامية في المنظمة العالمية لمتجارة مع اإلشارة إلى
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
longitudinal and c) transversal cuts. 136 Figure 88 : a) design of the TEM cell and the MEA-2, b) En field spatial distribution at the surface of MEA-2 microelectrodes at 1.8 GHz,
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
Partitive articles (du, de la, del') are used to introduce mass nouns, that is nouns that are conceived of as a mass of indeterminate quantity.. They are usually translated as
Examples of the results of segmentation of artificial images are shown in Figure 2: (a) an image containing two areas with different statistical characteristics; (b) the result of
The considered scheme of the algorithm for GI (exhaustive search on all bijections that is reduced by equlity checking of some invariant characteristics for the input graphs) may
