Synthèse organique et caractérisation physico-chimique de cristaux liquides ferroélectriques conçus pour l'optique non linéaire
Texte intégral
Figure


Documents relatifs
4.13 Evolution de la polarisation obtenue par mesure indirecte de cou- rant de dépolarisation pour le OB4HOB en fonction de la température pour différents champs électriques.. 104
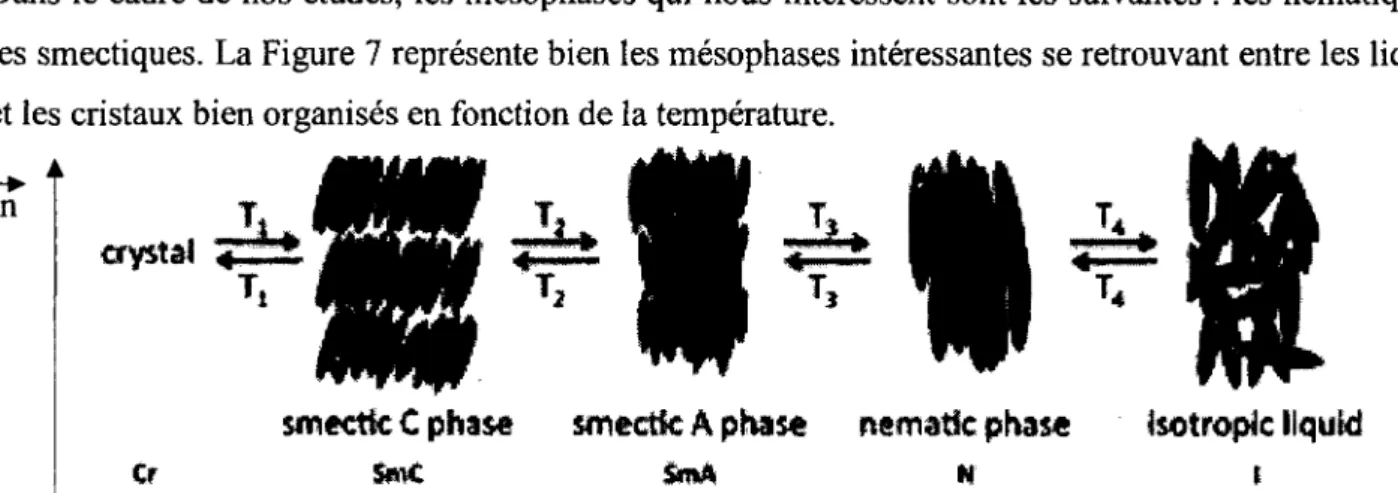
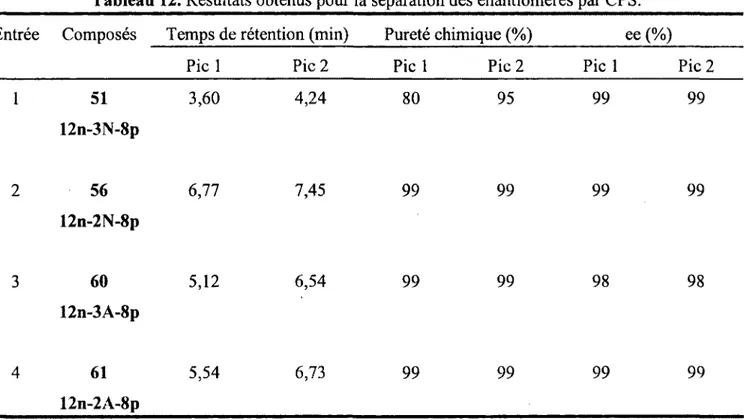
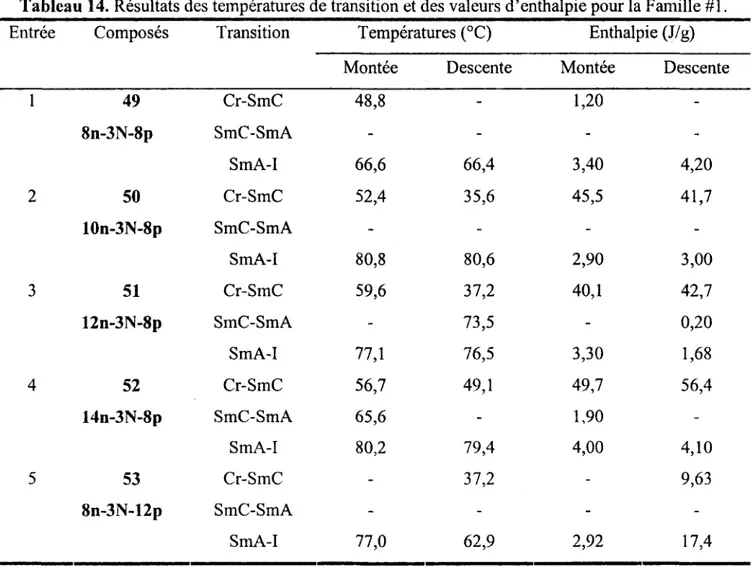
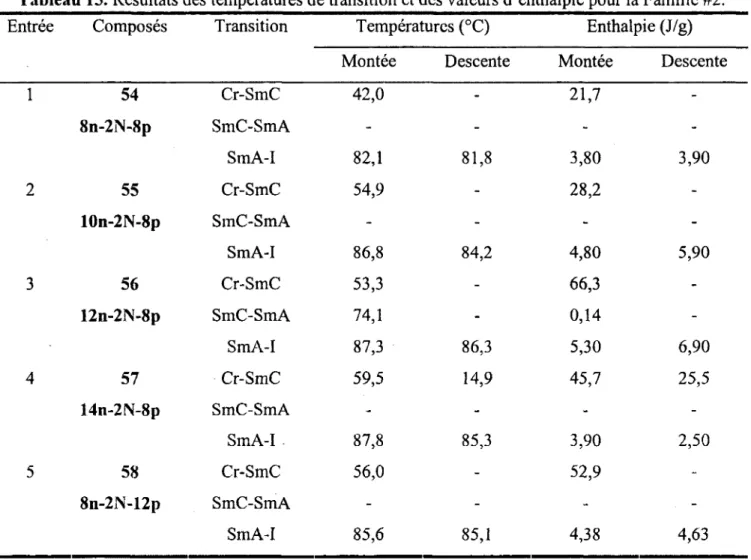
Les différents composés préparés pour chaque amine ((4a ) à { 4d )) sont donnés dans les cinq tableaux suivants numérotés de 1 à V avec les différentes phases
e Soit les changements conformationnels sont plus rapides que les mouvements de réorientation de la molécule, il est alors possible de définir une molécule en
Une étude complémentaire plus poussée de la morphologie et de la composition (nous avons en effet remarqué au § 4.2 une évolution de la composition de surface des particules au
terre à ana- lyser placés dans le tube à combustion, réuni d'une part aux compte-bulles et de l'autre aux absorbeurs; ceux-ci ont reçu une quantité de soude demi-normale telle que
mais aboutissent également à une disparition des interactions antiferromagnétiques et du gap de spin. De plus, l’évolution des propriétés thermoélectriques en fonction de
1.3.4.2 Molécules conjuguées pour l’élaboration de matériaux de type p L’intense activité de ces dernières années sur l es semi-conducteurs organiques de type p à base
Figure E.2: Lorsque le robot ex´ecute la trajectoire, il doit estimer la dynamique de l’objet manipul´e, calculer la force de contact entre l’objet et l’humain, et contrˆoler
