Tasks sequencing for visual servoing
Texte intégral
Figure
Documents relatifs
Following (McCarthy and Nav- igli, 2009), we adapted this principle to the task, by com- plementing the initial annotation dataset with all the sub- stitutes provided by the
To manage this paradoxical issue, Antonini (2003) proposed tasks and situations that can help students to generate the idea of indirect argumentations and proof
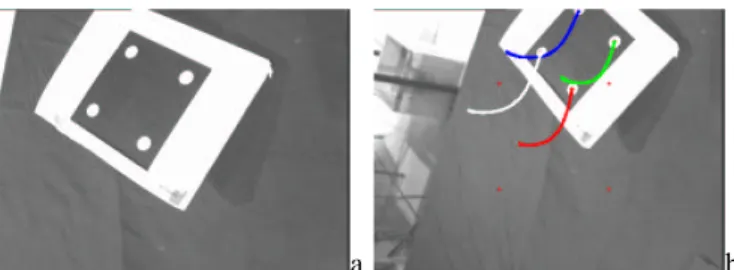
Visual servoing based on the tracking of points of interest: (a) initial image, (b) final image, (c-d) classical visual servoing control law (difference image and point trajectory
We conducted with the same participants two experiments differing in the mode of presentation of the stimuli in the non-verbal task (continuous versus discrete),
Figure 3: Detection rate curves for YN, LS_endpoint, and CS displaying the relationship between sample size and estimated detection rate for both approaches to hypothesis
However, this aftereffect was abolished if the second PF2 trial was replaced by an oppositely directed velocity-dependent force field (VF). Interestingly, in the following VF
When there are no differences in initial scores between preexisting stable groups, the change score analysis, ANCOVA, and the residual change analysis would yield similar
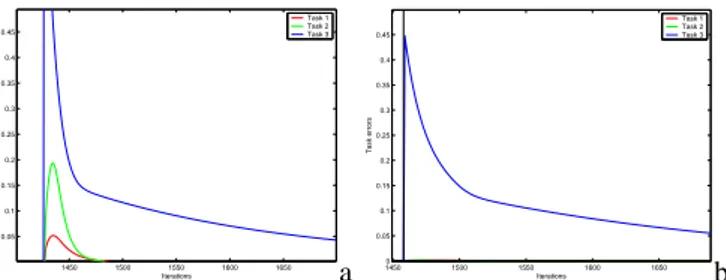
and finally e L , then remove the tasks one by one in the same order. 2 shows the evolution of the non-smooth control law. Each insertion causes a discontinuity in the control law,
