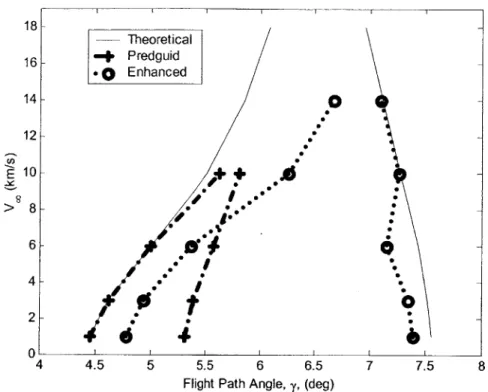
Aerocapture guidance methods for high energy trajectories
Texte intégral
Figure

Documents relatifs
For this problem, the use of a robust energy-conserving algorithm makes it possible to use reasonnably large time steps (∆t= 2.E-4 s for which contact oscillations are not
In this article, the forward problem using time-angle sensitivity kernels (T-A-SK) – estimate TT, DOA and DOD variations from known sound speed perturbations – is studied in order
These include control of chemical and microbial contaminations from sampling to analysis and identification of experimental procedures for characterizing airborne microbial
We compare three different ways of data allocation: On first core (memory is allocated on the memory bank closed to the first chip-set), Good location (each thread allocates its
It was thus hypothesized that (a) CB and SPB are moderately correlated, (b) CB and SPB are positively linked to anxiety and depression, (c) overestimation of CB by patients
in the EOM/sand mixture, goethite seems to play an active part in the oxidation
Atmospheric aerosols at the Pierre Auger Observatory : characterization and effect on the energy estimation for ultra-high energy cosmic rays... 1.2 Extensive
If we classify the production process by the sign of the hyperon polarization, as shown in Figure 6, it is apparent that the spin of the hyperon is in the same direction as
