HAL Id: hal-01627421
https://hal.archives-ouvertes.fr/hal-01627421
Submitted on 6 Feb 2021
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of
sci-entific research documents, whether they are
pub-lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destinée au dépôt et à la diffusion de documents
scientifiques de niveau recherche, publiés ou non,
émanant des établissements d’enseignement et de
recherche français ou étrangers, des laboratoires
publics ou privés.
Validation of O(1S) wind measurements by WINDII: the
WIND Imaging Interferometer on UARS
W. A. Gault, Gérard Thuillier, G. G. Shepherd, S.-P. Zhang, R. H. Wiens, C.
Tai, B. H. Solheim, Yves Rochon, C. Mclandress, Chantal Lathuillière, et al.
To cite this version:
W. A. Gault, Gérard Thuillier, G. G. Shepherd, S.-P. Zhang, R. H. Wiens, et al.. Validation of
O(1S) wind measurements by WINDII: the WIND Imaging Interferometer on UARS. Journal of
Geophysical Research: Atmospheres, American Geophysical Union, 1996, 101 (D6), pp.10405-10430.
�10.1029/95JD03352�. �hal-01627421�
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 101, NO. D6, PAGES 10,405-10,430, APRIL 30, 1996
Validation of O(S) Wind Measurements
by WlNDII:
the WIND Imaging Interferometer on UARS
W.A. Gault,
• G. Thuillier,
2 G.G. Shepherd,
• S.P. Zhang,
1 R.H. Wiens,
• W.E.
Ward,
a C. Tai, a B.H. Solheim,
1 Y.J. Rochon,
1 C. McLandress,
a C.
Lathuillere,
4 V. Fauliot,
2 M. Hers•,
2 C.H. Hersom,
a R. Gattinger,
s L. Bourg,
2
M.D. Burrage,
6 S.J. Franke,
7 G. Hernandez,
s A. Manson,
9 R. Niciejewski
6
and R.A. Vincent. to
Abstract. This paper describes the current state of the validation of wind
measurements
by the wind imaging
interferometer
(WINDII) in the 0(1S)
emission. Most data refer to the 90-to-l10-km region. Measurements from
orbit are compared with winds derived from ground-based observations using
optical interferometers, MF re[de[rs and the European Incoherent-Scatter radar
(EISCAT) during overpasses
of the WINDII fields
of view. Although the data
from individual passes do not always agree well, the averages indicate goodagreement for the zero reference between the winds measured on the ground
and those obtained from orbit. A comparison with winds measured by the
high resolution
Doppler imager (HRDI) instrument
on UARS has also been
made, with excellent results. With one exception the WINDII zero wind
reference
agrees
with all external measurement
methods
to within 10 m s -•
at the present time. The exception is the MF radar winds, which showlarge station-to-station differences. The subject of WINDII comparisons with
MF radar winds requires
further study. The thermospheric
O(•S) emission
region is less amenable to validation, but comparisons with EISCAT radar
data give excellent agreement at 170 km. A zero wind calibration has been
obtained
for the O(•D) emission
by comparing
its averaged
phase
with that
for 0(1S) on several
days
when alternating
1D/•S measurements
were made.
Several other aspects of the WINDII performance have been studied using
data from on-orbit measurements. These concern the instrument 's phase
stability, its pointing, its responsivity,
the phase distribution in the fields of
view, and the behavior of two of the interference filters. In some cases, small
adjustments have been made to the characterization database used to analyze
the atmospheric data. In general, the WINDII characteristics have remained
very stable during the mission to date. A discussion of measurement errors
is included in the paper. Further study of the instrument performance may
bring improvement, but the utimate limitation for wind validation appears to
be atmospheric variability and this needs to be better understood.
•York University, Toronto, Ontario, Canada.
2 Service d'A•ronomie du CNRS, Verri•res-le-Buisson, France. 3Institute for Space and Terrestrial Science, Toronto, Ontario,
Canada.
4 Centre d'Etude des Ph•nom•nes Aleatoires et G•ophysiques,
Saint-Martin-d'H•res, France.
S National Research Council, Ottawa. 6University of Michigan, Ann Arbor. ? University of Illinois, Urbana. 8 University of Washington, Seattle. øUniversity of Saskatchewan, Saskatoon.
•øUniversity of Adelaide, Adelaide, Australia.
Copyright 1996 by the American Geophysical Union.
Paper number 95JD03352.
0148-0227/96 / 95 JD-03352505.00
1. Background
The wind imaging interferometer (WlNDII) was put
into orbit on NASA's Upper Research Satellite (UARS)
on September 12, 1991. Its mission was to measure
winds, temperatures, and emission rates in the altitude range 80 to 300 km, with an emphasis on the lower part of this range. Nearly 16 million images of the upper atmosphere had been acquired up to November 1994, and analysis of the data is in progress. Validation of
the results is an essential part of this. In this paper we describe the validation process that was conducted
in order to give the reader, including future users of WlNDII data, an understanding of the procedures that
were employed. Also included is a description of the er-
ror estimate procedures and estimated error values. A
detailed description of the comparison with a ground- based Michelson interferometer is presented in a com-
panion paper by Thuillier et al. [this issue]. Prelimi-
nary scientific results have been presented by Shepherd
et al. [1993a], McLandress et al. [1994], and Shepherd
et al. [1995]. The present paper describes the current
state of the validation of the winds measured from the
O•S emission and the method used to determine the
preliminary zero wind value for the O•D wind measure-
mcnts. The validation of other quantities measured by
WINDII will bc presented in later publications. The instrument has bccn described by Shepherd et al.
[1993b], along with the basic data analysis procedure.
A field-widened Michelson interferometer [Hilllard and
Shepherd, 1966] is positioned in the optical path of a
charge coupled device (CCD) imager directed toward
the Earth's limb with the bottom of the image corre- sponding to a tangent point altitude of about 80 km and the top at about 300 kin. Single airglow emission lines arc isolated with interference filters, so that an image obtained from that emission is an image of the emission
rate multiplied by the transmittance of the interferome-
ter, which depends on its phase setting as well as on its
off-axis phase variation. One mirror of the interferom-
eter is phase stepped as an image sequence is acquired, either four or eight steps to cover one complete fringe. For each pixel on the image the corresponding eight sig-
nal values arc analyzed to determine the phase of the
cosinusoidal signal. The principle of wind measurement from space consists of comparing the phase generated by an airglow linc with the phase in the same instru-
mental condition when there is no Doppler shift of the
wavelength of this line. Let the •b be the phase of the
emission between 0 and 2•r and let •bint bc this intrinsic phase when the wind is null. The wind velocity is then
given by v: K• (•b - •bint), where K• is the constant
•oC Hcrc Ao is the unshiftcd
wavelength
of the cmis-
27rD ' '
sion, c is the velocity of light, and D is the effective optical path difference of the interferometer as given by
Thuillier and ttersd [1991].
As the zero wind phase is not available in orbit, a
calibration lamp delivering a line of wavelength close to A0 is used, providing a phase •c. Calibration on the ground consists in measuring •i•t - • by the use of the same lamp as in orbit and a source delivering the same airglow line as in the Earth's atmosphere. The fundamental principle of the wind measurement is to
assume that
(0int -- O
c)orbit
= (0int -- O
c)ground
----
Oz
(1)
95• is assumed to be a constant from ground to space. It needs to be known for the two instrument fields and for both day and night apertures. Operating the cali-
bration lamp at regular intervals in orbit provides 95•,
allowing the reconstruction of the zero wind phase in or-
bit from 95• + 95• and its trend during the mission. The
purpose of the validation is to estimate the magnitude
of the errors, and this is discussed in detail below.
In practice, it is more complicated than this. First
of all, since wc arc dealing with images, •int is an im-
age •bint(k,/), where k and 1 represent CCD rows and
columns, respectively. In addition, WINDII has two
fields of view, one at 450 and the other at 1350 to the spacecraft velocity vector, in order to measure two com- ponents of the horizontal wind; the fields of view have
independent
•bint(k,
1)• and •bint(k,
1)2 images.
As well,
WINDII uses a stopped-down aperture during the day-
time to accommodate the baffle system which screens
the light from the bright cloud
tops below. Since
only a
portion of the full Michelson interferometer aperture is
used in this case, the phase condition is different from
that at night, and so there arc two different
zero images
for each
field
of view,
e.g.,
qbint(k,
1)2
D and qbint(k,
1)2
N for
field of view 2 (FOV2). Finally, the spacecraft
velocity
component along the line of sight must bc removed, as
well as that of the Earth's rotation velocity.
The WINDII instrument
has an extensive
package
of calibration equipment, intended to provide a basic
characterization capability in orbit. This includes four spectral lamps for phase calibration in each of the four
spectral regions, a tungsten lamp for responsivity cali-
bration
and a laser
for the calibration
of visibility,
which
is a measure of the intcrfcromctcr's ability to modulate
emission lines. The stabilized Hc-Nc laser is in itself a primary standard of visibility.
The spectral lamps and the tungsten lamp arc consid-
ered secondary standards that wcrc calibrated against
primary standards on the ground. The primary stan-
dards for phase (zero wind) were laboratory lamps emit-
ting the same atmospheric emission lines as observed in flight. Prcfiight ground characterization also included measurement of the filter passbands for each elementary
bin on the CCD.
In addition to showing general consistency with other
methods of measuring the wind, there wcrc several spe-
cific reasons to conduct in-flight validation of the data.
Calibration measurements arc particularly difficult with
an interferometer having a large field of view, and there
is the possibility of sudden changes occurring during launch and gradual ones afterward in the space envi- ronment. The laboratory sources of atmospheric lines could have had undetected parasitic lines able to in- ducc some systematic phase error. Also, only one of
the two instrument fields of view was calibrated with
the atmospheric linc source, and this calibration was
then transferred to the other field, assuming symmetry in the interferometer. This procedure may have intro-
duced some error. Atmospheric observations made at
the Earth's limb require the deconvolution of one or sev- eral integral equations as a function of altitude. In the case of WINDII, three equations are solved by a method
explained by Shepherd et al. [1993b]. All of the above
considerations led to the necessity of having a campaign
of correlative measurements between WINDII in orbit and other instruments.
Important comparisons were made with a similar
GAULT ET AL.: WINDII VALIDATION 10,407
line, the MICADO instrument operated at the Obser- vatoire de Haute-Provence. Other optical comparisons
were made with the same emission line but against a dif-
ferent type of instrument, Fabry-Perot interferometers operated at Mount John in New Zealand and at Peach Mountain in Ann Arbor, Michigan. Another type of
comparison was made with the high-resolution Doppler
imager (HRDI) on UARS [Hays et al., 1993], which
measures winds from a different emission, the 02 atmo-
spheric band. Finally, comparisons were made against
measurements by nonoptical methods, namely, radars. There is an extensive worldwide network of MF radars, and for these comparisons, sites were selected in Ade- laide, Christmas Island, Saskatoon, and Urbana. In ad-
dition, the European incoherent-scatter (EISCAT) fa-
cility provided incoherent scatter wind comparisons, in-
cluding an important one at 170 km. All of the WlNDII
data reported here have been analyzed using version 4.23 of the production software.
2. Wind Measurement Procedure 2.1. Instrument Description
Light entering WINDII passes first through a large
(•1 m) baffle, then through a telescope, a filter,
other telescope, the Michelson interferometer, and nally is focused at the CCD detector by a camera lens. The first telescope has two objective lenses and a dou-
ble mirror which combines the two fields of view into
one, so they appear side by side on the CCD. The sec- ond telescope contains the actual field stop. The filter
wheel has eight positions, one of which is open to allow for calibrations and the imaging of star fields. The other seven positions contain interference filters for the var- ious atmospheric emissions and background measure- ments. Several plane mirrors are used to fold the optics
into a compact form. The look directions for the two
fields of view are approximately normal to each other,
viewing the atmosphere at the limb on the antisunward
side of the spacecraft, at 450 and 1350 to the velocity
vector. Diagrams of the instrument and optical system
are given by Shepherd et al. [1993b].
During calibrations, two mirrors are deployed, one in front of each entrance aperture and at 450 to the optical axis, cutting off light from the atmosphere and allowing the instrument to view the calibration sources. Phase calibrations and dark current measurements are done approximately every 15 to 20 min. Major calibra-
tions, including responsivity (tungsten lamp) and visi-
bility (He-Ne laser) as well as phase
(spectral
lamps),
are done about once per week.
The baffle is designed to permit daytime measure- ments of the weak airglow emissions, which can appear as closely as 1.50 above the sunlit cloud layers. This design includes a retractable stop which reduces the en- trance aperture to a narrow slot during the daytime in order to prevent the sunlight scattered by the cloud lay- ers from entering directly into the WINDII optical sys-
tem. We refer to these two configurations as the "day
aperture" and the "night aperture". The reduced col- lecting area during the daytime is approximately com- pensated by the increased emission rate.
The Michelson interferometer is achromatically field widened and thermally compensated and set at a path difference of 4.46 cm. With a larger path difference than this, the fringes due to the hot thermospheric emissions
(O 1D and O + 2p) would lose visibilty and their wind
measurements would be compromised. The Michelson
consists of hexagonal beam splitter and two arms of different glasses with a small gap at the end of one arm.
The mirror in this arm is piezoelectrically mounted for
alignment adjustment and changing the path difference
in the small steps required to measure the phase and
visibility of the fringes. The whole interferometer is cemented together, forming a very rugged unit.
To limit the amount of data for transmission and
improve the signal-to-noise ratio, the CCD pixels are
grouped together in bins and the signals are added on the chip for each bin. Most measurements are made us- ing six columns of bins, each 25 pixels wide and 2 to 8
pixels high. Observing windows are also defined for the CCD, including only the parts of the CCD where useful
data are obtained. The fields of view are fixed with re-
spect to the spacecraft, so the emission layers rise and
fall in the CCD image as the spacecraft
changes
alti-
tude, and the windows
move
up and down accordingly.
Typical exposure times for the iS emission are 1 to 2 s.
2.2. Data Analysis
Analysis of WINDII data begins at the level of the
individual bins which compose the phase images. Each
bin measures a line-of-sight intensity of the airglow
limb. The altitude associated with a bin is the alti-
tude at the tangent point. Thus a column of bins scans
a vertical slice in the atmosphere with an altitude range
defined by the bottom and top bins in the column. The horizontal extent is normally the full width of the im-
age area, which maps to about 140 km at the tangent
points along a row of bins. A single pixel subtends ap-
proximately
1 km 2 at the tangent
point giving
a vertical
resolution of 2 km for a two-pixel bin. The bin size is
chosen to give optimum signal to noise ratio and spa-
riotemporal resolution for a given observation.
A measurement contains the atmospheric signal as
well as a background signal. During normal opera-
tions a background image is taken followed by a set
of phase images. The processing software subtracts the appropriate dark current from the background and at- mospheric images bin by bin. The raw count rate is next
converted to geophysical units (Rayleigh) using the re-
sponsivity of each bin. (One Rayleigh corresponds to an
emission
of 10
• photon
s -1 from a 1 cm
• column
along
the line of sight.) This calibration information is stored
in a characterization database (CDB) which is accessed
by the production processing software. Since the back-
than the atmospheric line of interest, the background image is corrected to the observation wavelength. The method used to correct the background image is de-
scribed by Shepherd et al. [1993b]. The corrected back-
ground is then subtracted from each of the measurement images yielding only the atmospheric signal.
WINDII views the limb and so is sensitive to the
spacecraft attitude. The altitude, latitude, and longi- tude of each bin in each image are computed. Either four or eight images are taken for a normal measure- ment. The observatory may roll or change attitude from image to image. Using a middle image in a set of 4 or 8 to give a reference altitude, the remaining images are
corrected to account for any attitude variation. Next the velocities due to spacecraft motion and earth rota-
tion, projected along the line of sight, are derived for
each bin. These are used to calculate the contribution
to the observed phase of the spacecraft-induced Doppler
shift. The instrument phase determined from the fre-
quent phase calibration is corrected from the CDB to give the zero wind phase for the current measurement. Finally the projected velocity phase and the zero wind
phase are combined with the mirror step phase to give
the known phase component of the measurement.
The measured intensity of a given bin at a given time may be written in the generalized form as an integral along the line of sight L:
E(z)
[1
+ VV(z)cos((I>p
+ &w
(z))]
dl
(2)
where E(z) is the volume emission rate at altitude z, U
is the intrinsic (instrumental) visibility of a given bin,
V(z) is the line visibility corresponding to the atmo-
spheric temperature, T(z) and Ow(Z)is the phase due
to the atmospheric wind; (I>p -• + (p-•)•o, where • is
the phase due to the optical path difference, spacecraft velocity, and Earth rotation, •o is the step size for the Michelson mirror, and the index p- 1,2,...,n, where n is the number of steps per measurement. Usually,
90 _ 2__=.
nThe relationship
between
V(z) and T(z)is
given by
V(z)-
(a)
where A is the optical path difference in the interferom-
eter and Q is a molecular constant [Hilllard and Shep-
herd, 1966].
If the cosine argument is expanded, then equation (2)
may be written as
- Z(z
+ v cos Z(z)V(z)
cos(Ow(Z))a
- Usin
(I>p
E(z)V(z)sin(Ow(z))dl
(4)Ip : J• n t- U COS (I)pJ2 - U sin (I)pJ3 (5)
The values J•, J2, and J3 are the line integrals in
equation (4) and contain the atmospheric information
we wish to recover. The vectors J•, J2 and Ja are de-
fined to be the "apparent quantities." Equation (5)
thus forms a simple linear system which is solved with standard matrix techniques.
Wave motion, or other structure in the atmosphere,
perturbs the interferogram and thus introduces error
in the recovered wind. The magnitude of this error is reduced by combining the six columns in a typical image across each row to give one vertical column or one
profile for each field of view. This column combination
also reduces the random error relative to a single bin. The final result provides two column vectors referenced to the centers of each field of view for each of J•, J2, and Ja. These are the apparent quantities that are used
in the inversion routine.
A locally spherically uniform and time invariant at- mosphere is assumed for the inversion of the apparent quantities; the inversion might not correctly recover the atmospheric information in regions of significant inhomogeneity, for example, in twilight or in regions of auroral activity. Each profile for each field of view is inverted separately using a linear constrained least
squares method with statistical weighting [MenIce, 1984;
Twomey, 1977]. Linear constraints are introduced for
damping noise-related oscillations. Data reduction, in- cluding the inversion process, is further summarized in
section 3 within the context of a random error assess-
ment. There is always a trade-off between noise re-
duction and the smoothing of vertical structures. The weighting factors and the constraint matrices have been
chosen to reduce noise but not to remove real atmo-
spheric structure.
Once the volume emission rate, wind, and tempera- ture profiles have been obtained from each field of view, the meridional and zonal wind components are derived by combining forward and backward looking observa- tions. The two fields of view track each other through
the atmosphere. Approximately 7 min after the forward
field of view sees a particular volume of air, the back- ward looking view sees the same volume from a perpen- dicular direction. The line of sight winds are combined to yield the vector winds only if the two views inter- sect within 300 km at the tangent points. The volume
emission rate and the wind from the two fields are aver-
aged to give the final profiles at the intersection point. Before averaging the scalar quantities or resolving the wind vectors, the profiles are all interpolated to a com- mon altitude grid. The final step in the processing is to reduce random noise without removing discernible
atmospheric structures.
2.3. Instrument Characterization
The ground characterization of WINDII took place during September and October, 1990, approximately
GAULT ET AL.' WINDII VALIDATION 10,409
one year prior to launch. This was an effort to measure
all the characteristics of the instrument that would be
needed to create the CDB, which is used to support op-
erational data processing. A full discussion of the char-
acterization is given by Hersom and Shepherd [1995].
Among the quantities measured were the zero reference
phase for O1S and the responsivity.
A small laboratory source of O1S emission was de-
veloped by Resonance Incorporated, to determine the interferometer 's phase corresponding to zero Doppler
shift. The limitations of the low intensity of the 557.7-
nm emission and the need to block a nearby contam-
inant line meant that the entrance aperture could be
fully illuminated for only a portion of the field of view.
Thus the zero was determined for a region near the bottom of the field, and a rubidium lamp, with an iso- lated emission line at 557.9 nm, was used to provide the
phase distribution over the rest of the field as well as
the phase shift between day and night aperture settings. In addition, phase measurements were made using the
onboard krypton calibation lamp (557.0 nm) so that
(•bint- •bc)ground
could
be determined
for O1S.
No lab-
oratory source was available for the O•D emission at
630.0 nm, but the phase distribution over the field and
the difference in phase between day and night apertures
was determined using the neon line at 630.5 nm. The responsivity measurement utilized a calibrated tungsten-halogen lamp to irradiate a barium sulfate re-
flectance screen placed in front of the instrument in such
a way that both the aperture and the field of view were completely filled. The lamp was located about 8 m from the reflectance screen to ensure good uniformity of illu-
mination. For each interference filter and both aperture positions a series of exposures was taken with the inte-
gration time incremented by 0.25 s from 0.25 s to the
saturation point. This provided about 10 measurements for each case. For these measurements the signal was
integrated in standard CDB bins of 1 x5 pixels, with the long sides horizontal. Thus each image consisted of 240
rows and 31 columns of bins in each of the two fields of
view. A least squares linear fit was applied to each data set to determine the signal versus exposure coefficient for each bin. The light level illuminating the aperture was computed in Rayleigh from the known transmission characteristics of the filter, the reflectance of the screen, and the lamp calibration. The instrument responsivity
was then determined in ADU s -• Rayleigh -1, where an
ADU (analog-to-digital unit) corresponds to one level
of digitization.
3. Wind Random Error Assessment
3.1. Introduction
WINDII data provided in the UARS database contain information on the precision of the wind measurements.
In this section the sources of random errors in the de-
termination of WINDII winds are reviewed. For clarity,
errors affecting the line of sight or apparent quantities
are first discussed followed by a summary of the errors associated with the inverted quantities. This approach
provides an understanding of the physical sources and
causes of the errors which would be masked if only in-
verted quantities were discussed.
The quantity directly measured by WlNDIi is a line
of sight emission rate (integrated through the emission
layer) modulated by the interferometer. The line of
sight or apparent phase is calculated by solving a matrix equation formed using sequences of these line of sight
modulated emission rates. The associated inverted
quantities are calculated from the apparent quantities using linear constrained least squares inversions with statistical weighting, as described in section 3.3. Asso- ciated with the derived quantities resulting from each of these steps is a statistical uncertainty in the derived quantitity. These are termed random errors. Apart from the inverted quantities, the variances of these er- rors are calculated, using standard methods, from the
error variances of the variables on which the derived
quantity is dependent. More formally, for any solution
vector quantity, f = f(xi), dependent on vectors xi, the
expression
f -- • q-
• Disi
(6)
i
follows from a first-order expansion of f in terms of the
xi. Here, f is an appropriate reference value for f, the Di are coefficient matrices termed contribution func-
tions [Rogers, 1976, 1990], the si - ii- (xi) are in-
dependent error vectors, and the :•i are measured esti-
mates for the actual values for xi, (xi). The correlation
matrix for f is given as
-
(7)
i
and the variance is
- &
(8)
Here S• -- zij zi
•$k k 'S•
•kk-- cr
•k '2
3.2. Apparent Quantities
The derivation of the apparent quantities proceeds
from the analysis
of a series
of n emission
rate images
each at a Michelson
phase (to within experimental
er-
ror) (I)p (section 2.2). Considering the uncertainties of
the various parameters in the interferometer equation
at each bin, equation (5) is rewritten as bp • where (v + [(p- + + (½ +
Ya (U + ev)sin [(p - 1)(• + •½) + (½ + •½)]
(9) (lo)The values of s• denote deviations from the correspond-
ing true values
and (Ip + •op), (U + •v), (9 + •) and
((P + •½) are, respectively, the available estimates of the
emission line signals, instrument visibility, incremental
phase step, and phase (excluding •b•,). The J values
are as defined earlier (equations (4) and (5)). Apply-
ing the small-angle approximation to the phase errors
yields to first order an expression which may be used
to form a matrix equation for the set of n images. The apparent quantities and the associated covariances are determined from the weighted least squares method. It
is of some interest to note the equivalence of this ap-
proach for the unweighted case (originally discussed by
Wiener [1930]) to the discrete Fourier transform for an
even number of equally spaced steps in an interval of
Upon solving the above system, the Doppler wind phase variance for four phase steps of •r/2 or eight phase steps of •r/4 is given as
:• - rr} +
(11)
O'ou ,
2c
T (yl-]
-IB+(cD-Cbia-•)cT
CTCr•)
+
where the effect of the phase step uncertainty has been neglected. Here, cr is the conversion factor transform-
ing the raw count (ADU) to Rayleigh, T! is the mean
filter transmittance over the measurement being con-
sidered for the emission being observed (i.e., 557.7 nm),
nA is the raw count to electron conversion factor (=
73 e ADU-1), I, is the background
signal
in Rayleigh,
C o is the dark count, and C•i,• is the bin bias, both in
ADU, and a} is the net random
error variance
associ-
ated with the intrinsic
ph•e; a} is termed
the reading
error variance (ADU) and consists of the readout (50
e), digitization (21 e) and on-chip noise (62 e) contri-
butions. The relationship between the Doppler wind phase 6• and the Doppler wind w is
O•
+ e½•
- 2• (w
+ e•)
(12)
Ao c
Neglecting the small uncertainty of the conversion pa-
rameters, the Doppler wind error variance is
a• - •}• k2•D
(13)
where D is the effective
path difference
as defined
by
Thuillier and Hers• [1991].The two main sources
of error variance
appearing
in
equation (11) are those associated with the emission
rate measurements
(first term on the right) and those
associated
with the phase determination
(the second
term on the right-hand
side of equation
(11)), termed
the intrinsic phase error variance. The shot noise associ-
ated with the measurement
process
itself (for the green
line, the background and the dark count measurements
all make a contribution)
is the main source
of error vari-
ance for the emission rate measurements except when
the observed emission rate is small. In this case the
reading error is also significant.
The intrinsic phase total error variance is composed of
terms associated with the calibration lamp phase mea-
surements, the relative phase difference (the phase dif-
ference between the reference lamp and the observed
emission), the phase associated with the satellite veloc-
ity, and the phase associated with the Earth's rotation. For the most part the first two error variance sources comprise the dominant contribution. Not included in this phase error variance, as mentioned above, is a con- tribution due to the uncertainty in the interferometer
phase step between images. This contribution varies
depending on the value of •5 [Ward, 1988] and has a
maximum contribution of 4 m s -1 assuming a phase
step uncertainty of 0.0005 nm.
The determination of the apparent quantities pro- ceeds on a bin-by-bin basis and results in six profiles of each of the three apparent quantities. As stated in
section 2.2, these y values are averaged over the six mea-
surement columns for each field of view. This scales
the size of the resultant random error covariances by
1/6. However, the systematic error covariances are un- affected. Grouping the apparent quantities of the mea- surement rows, following column averaging, yields three apparent quantity profiles or vectors yi and correspond-
ing covariance
matrices
Sy,j, where i and j = 1, 2, and
3.
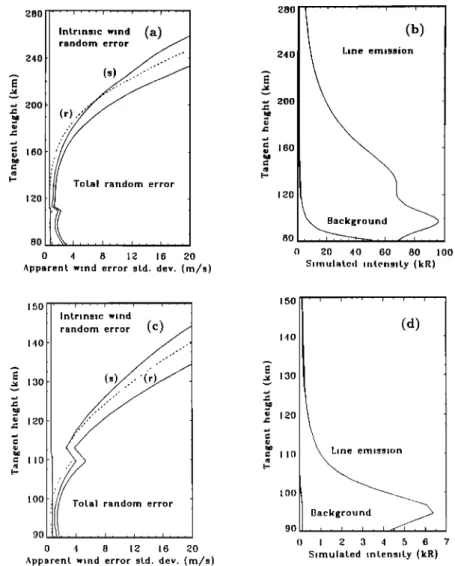
Figure 1 shows the apparent wind error standard de- viations and apparent emission rate profiles for column-
averaged quantities associated with typical day (Figures
la and lb respectively) and night observations (Figures
lc and ld) respectively) of the oxygen green line emis-
sion with WINDII. In the plots of the apparent emission
rate both the emission profile and the background ap- parent emission rate profile are shown. During the day- time the rapid increase in background apparent emis- sion rate at the lower altitudes due to Rayleigh scatter- ing is evident. In the plots of the apparent wind error
standard deviation the error associated with the shot
noise (designated s), the reading wind error (designated
r), the intrinsic random error, and the total random er-
ror are shown. In general, for both day and night the dominance of the error by the shot noise, when the ap- parent emission rate is high, is apparent. The reading wind error is significant at all heights but is more sig-
nificant when the apparent emission rate is low. The remaining contribution, the intrinsic wind random er-
ror, is due to the satellite and Earth rotation velocity
determination
(V/•s + rr•
2 = 0.1 m s-i), the zero
wind
determination
(rr• = 0.7 m s -1 for the mesosphere
and
0.5 m s -1 for the thermosphere),
and the calibration
phase
determination
(rr• = 0.3 m s-1). The intrinsic
wind random error is only significant in regions where the apparent emission rate is high.
3.3. Inverted Quantities
The reduction from line-of-sight integrated quantities to profiles in altitude is performed using three inversions
GAULT ET AL.' WINDII VALIDATION 10,411
280
Intrinsic
w•
240 .-'"' '200
.
160
120 80 •,,,•,,,•,.,I,,, o 4 8 12 16 20 Apparent wind error std. dev. (m/s)240 200 160 120 80 o (b) Line emission •o 40 60 80 100 Simulated intensity (kR)
140
...
130
120 110 150 140 130 120 110 1 oo 90 9O 0 0 4 8 1• 16 •0 Apparent w•nd error std. dev. (m/s)(d) n
Background
, I . • , t , i ß I 2 3 4 5 6 7 Simulated intensity (kR)Figure 1. The apparent
wind
error
standard
deviations
and associated
emission
rate profiles
for
typical
(a and b) day and (c and d) night
conditions.
In the wind
error
standard
deviation
plots,
r indicates
the reading
wind error and s the error associated
with the shot noise.
of the form [e.g., Twomey,
1977;
Menke,
1984]
Xi -- (L•'S•-,•Li
+ '7iK/TKi)
-1 L•S•-,•yi (14)
where
xi Yi
Li
Syzz
is the solution estimate vector, is the data vector,
is the limb geometry transformation matrix of
the forward model yi: Lixi (see Equation 21
from Shepherd et al. [1993]),
is the diagonal data covariance matrix, is the damping constraint matrix, and
is the weighting parameter.
For the inversion,
Sy is calculated
without the contri-
bution of the intrinsic phase random error. Each con-
straint matrix is a variant of a differences matrix with
rows containing
[..., 0,-1, 1,0,...] or [..., 0,-1,2,-1,
0,...]. Relative
scaling
of constraint
matrix rows and
the value of each weight parameter arc set to optimallyreduce the noise in the overall profile while retaining the smaller-scale features considered significant. While
work is continuing on refining the values used in the in-
version process, any future adjustments arc unlikely to
influence the overall results presented here. A detailed account of the inversion process will appear elsewhere.
Incorporating the damping term reduces the solution
random error variance estimates from
•r
2 - (L•-•Sy
03z zzL•-•')jj
(15)
to
-1
O'•.
i -- (L/TS•Li
q-
7Ki•'Ki)jj
(16)
These variances are then used to determine the final
wind random error standard deviation estimates. In the calculation of these variances only the random error
variance of the measurements (first term on the right-
hand side of equation
(11) are included
in the covariance
matricesThe induced error (composed of the discrctization
due to the finite bin size and the constraint bias), the
net signal noise (standard deviations
calculated
using
equation
15) and constrained
signal
noise
(standard
de-
•60 :/40 120 Constrained • 60 ,,,,...,,,.,.,.,... 0 I0 20 30 40 50 Doppler wind error std. dev. (m/s)
Vool.
cm.
200rate
400(photons/cma/s)
600 800 280 ' ' ' , ' ' ' , "' ß ' ' ' ' , (b) Wind . 240 . . emission J . 80{ ,'., • -75 -50 -25 0 25 50 75Simulated Doppler wind (m/s)
2oo
160
V0ol.
em.
30rate
(photons/cm3/s)
60 90 120,50
150
m.•
Volu.
140 140 { emission / 130 130 ,20 • 120 II0 II0 100 100 90 90 0 lO 20 30 40 50 -75 -50 -25 0 25 50 75Doppler wind error std. dev. (m/s) Simulated Doppler wind (m/s)
Figure 2. Typical error profiles for inverted winds and associated volume emission rate and
wind profiles
for (a and b) day and (c and d) night conditions.
and volume emission rate profiles typical of daytime
observations (see Figure 2b), are given in Figure
The corresponding nighttime profiles are shown in Fig-
ures 2c and 2d. Near the peak of the volume emission
rate profile the wind standard deviation is 6 m s -1 for
the daytime measurements
and 3 m s -1 for the night-
time measurements. The reduction in noise associatedwith the use of damping in the inversions and the min-
imal contribution of the induced error (apart from in
the region below the emission peak) is evident in these
figures.
The inverted profiles are calculated for each field of view and then combined to produce zonal and merid-
ional winds along the satellite track. These profiles are
then interpolated to produce the level 3 wind fields most
accessible to the scientific community. The errors pro- vided with these data are calculated using the appropri-
ate linear combination of the variances of the relevant
profiles. The potential difference between the initial
and the reduced standard deviations should be kept in mind when using WlNDII winds because the standard
deviations currently provided with the data are those
from equation (15) as opposed to those achieved with
the damping term, equation (16). The data are cal-
culated, however, using the damping term, so that the errors provided are larger than they should be given the method of calculation. In addition, the bin bias is not subtracted from the signal in the shot noise calcula-
tions. This results in an overestimation of the random
error variance of the same order as the reading error variance. These ambiguities will be resolved for data calculated using data processing software versions sub-
sequent to version 4.23. Since each solution profile is
determined independently from any other along the or- bit track, further noise filtering may be achieved, when desired by the data user, through carefully weighted combinations of neighboring profiles.
4. On-Orbit characterization
4.1. Horizontal Phase Corrections
The O1S zero reference
image was produced
by the
GAULT ET AL.' WlNDII VALIDATION 10,413
• --2
• --3
1 2 3 4 5 6
Column no.
Figure 3. Typical example of lateral phase varia-
tions: OiS, daytime bottom window of field of view
2 (FOV2), January 19, 1993. Averages for 20 rows of
pixels. Dashed line shows variations before the charac-
terization data base (CDB) adjustment, solid line after
adjustment. There are six columns of bins across each
field of view.
tion, the phase distribution was checked on orbit to the extent that it was possible.
It is not difficult to assess the lateral phase varia-
tions (along a row of pixels) by averaging many mea-
surements, because the lateral variations, on the scale of the field of view, are expected to be approximately random. This was done for several days at different
times in the mission by averaging the measurements for a whole day. Phase images were averaged separately for night and day apertures and for windows located in the upper and lower regions of the field of view. Mea-
surements made near the terminator were not used. An
example of the lateral variation is shown in Figure 3
(dashed line). It was generated by subtracting the row
average from each value in the row, and averaging 10
such rows. It represents the phase variations that are present after correction by the zero reference phase im-
age measured in the laboratory prior to launch. The lateral phase variations were found to be consistent for
the different times sampled.
These residual lateral phase variations were averaged for several days scattered through the mission and were then used to generate images to correct the column-to- column variations in the existing zero phase reference image without changing the average values for each row.
Figure 3 (solid line) shows data reprocessed using the
corrected reference data. Lateral variations still exist
in the data but are now about a third of the previous
ones. The corrections are not expected to change the wind values obtained for each row in the image but do
improve the statistics used in error estimates.
4.2. Filter Passbands
Interference filters can sometimes change their char-
acteristics over time, so it is useful to monitor their properties during the mission. On WINDII it has been
possible to study the passbands of the O1S and
filters on a regular basis using light from two of the
phase calibration sources. A technique has also been
developed to detect small changes in the tilt of the fil-
ters with respect to the optical axis. All the WlNDII
filters except for filter 5 were manufactured by Andover Corporation, who used a proprietary process to stabi-
lize their characteristics. Filter 5 (the broad-band OH
filter) was provided by Barr Associates.
The data used for the analysis come from the weekly major calibrations. In particular, absolute transmit- tance images of the filters taken with the night aperture
are obtained at the wavelengths
of the Kr (557.0 rim)
and Ne (630.4 nm) calibration lamps. The data usedhere are from a period beginning shortly after launch and ending in December 1•93. These data are cam-
160- _o 159- •: 158- o (i) 157- ._ 156
EEl
[3
[3 o o oo o
o oo
(o) n oDays after launch
I I I [] [] [] [] [3 [] [] 0 [] oo [] [] (c) 176- E •75- 174- ---• 173- o • 172- _ Q_
Days offer launch (x10 *•)
125 ..• 124- E c • 123- • 122- ,
-
x 121 ._ 120 I I I I 00 [] [] [] [3 ø [3 [] [] [] (b) [] 0[30 ø [] o [] [] []Days offer launch (x10 +2)
I I I I [] [] [] [] [] [] [] [] [] [] [] [] [] [] [] (d)
Days after launch (x10 +•)
Figure 4. Locations
of the normals
for the O1S and OlD filters as functions
of mission
time. (a
and b) Horizontal
and vertical
coordinates
for the OIS normal
(located
in FOV1). The prelaunch
values
are at day zero. (c and d) Same
for the OlD filter (in FOV2).
pared with similar transmittance images obtained be-
fore launch.
The transmittance images are circularly symmetric
and the center of the pattern marks the direction of the normal to the filter. A convenient way to study the
changes in the tilt of the filters is to plot the location of
the center of the transmission pattern as a function of time. For this purpose the centers of a selected number
of rings of constant transmittance were computed, and a weighted average of these centers was taken to be the estimated direction of the filter normal. Figure 4 shows
the horizontal and vertical locations of the estimated
centres for the OiS and O•D filters on the CCD for a
selected number of calibrations taken between launch
and the end of 1993. It can be seen from the plots that
there has been no significant drift in the tilts of the two filters since launch, although a slight shift of the order of 3 to 4 pixels in the horizontal direction toward the outer edge of FOV1 can be observed between the
ground (day zero) and flight positions for both filters.
The CDB has been adjusted for the effect of this small shift in the filter axis and no significant effect on the measurements is expected.
In examining the transmittance of the filters at the wavelengths of the calibration lamps, advantage was
taken of the inherent circular symmetry of the trans-
mittance images around the filter normal. The average
transmittance was computed for each image as a func-
tion of angular distance from the filter normal. Fig- ures 5a and 5c show typical plots of the averaged trans- mittance against angular distance from the estimated filter normals. The averaged transmittance at a selected number of incident angles was then plotted as a func-
tion of time. Figures 5b and 5d show variations in the
averaged transmittance at fixed angles from launch to
the end of 1993 for the O•S and O•D filters respectively.
The shift between the ground (day zero) and flight is
about -0.05 nm for both filters, and is likely due to a
temperature
difference.
Since
then the O•S filter has
shown no long-term drift exceeding +0.01 nm and the
OlD filter has apparently drifted back +0.03 nm, or 1%
of its bandwidth, during the time in orbit. These filters
can therefore be considered essentially stable.
Finally, although the transmittance of the two filters was studied using only the WINDII night aperture, it is reasonable to assume that similar results hold also for
the day aperture, which uses approximately 11% of the
area of the filter lying within the area used by the night aperture.
4.3. l•esponsivity
The tungsten halogen lamp is observed through each filter about once a week during the major calibrations
as a partial check on the instrument 's responsivity. Fig-
ure 6a shows the normalized response curves for filters 1 to 6. The response to the tungsten lamp has decreased
by 3 to 7% over 1100 days, with the most rapid change
near the beginning, and leveling off after day 800. This could be understood as a change of temperature of the tungsten lamp combined with darkening of the enve-
lope, affecting the shorter wavelengths (filters 1, 2 and
3) more than the longer ones. Other possibilities are radiation darkening of glass elements, changes in the in- tegrated filter transmittance, and changes in the CCD, in which case the instrument 's responsivity could be af- fected. As section 4.2 showed, filters 2 and 3 appear to
c- 7-
I I I i _
_
Angle to filter normal (deg)
40- 38-
36-
.34- 32[ I I I Io []
o
[] 0 0 0 26o 460 660 •6o ,0Days offer launch
644 .642- o 640- o .638•
"• .636
u• .654. •- .6.32- .630-• 628 0 [] [] 0 0 0 [] (d) o o o o o • J • I• 1do 260 360 460Angle to filter normal (deg) Days offer launch
Figure 5. (a) Typical average transmittance as a function of angle from the O1S filter normal.
(b) The same
for the O•D filter. (c) Average
transmittance
60 from the O•S filter normal as a
function
of mission
time. The prelaunch
value is at day zero. (d) The same
for the O•D filter at
30 from the normal.GAULT ET AL.' WINDII VALIDATION 10,415 1.02 1.00 0.98 0.96 0.94 0.92 0.90 , , • ß 4,5,6
f
(a)
....
"'
'-'•3
.-- t
0 200 400 600 800 10001200Days after launch
1.02 1.00 0.98 0.96
0.94
0.920.90
(b)
• •A•
0 200 400 600 800 10001200Days after launch
Figure 6. (a) CCD response
to the tungsten
calibra-
tion lamp as a function of mission time. Each curve
represents a different filter and is normalized to the ini-
tial point. The wavelengths for filters 1, 2, and 3 are,
respectively,
553 nm (background),
558 nm (O•S), and
630 nm (O•D). filters 4, 5, and 6 are the OH group,
730-735 nm. Data for filter 7 (O2 at 763 nm) are notplotted but are very similar •o the OH group. (b) Nor-
malized response of the lamp's photodiode monitor for
the same period. The wavelength is 540 nm. The dis-
crete levels are caused by coarse digitizaion. Data are not available for every calibration.
be very stable, so the effect is not likely due to them. Furthermore, Figure 6b shows that the change in signal from the tungsten lamp's monitor is about the same as
for filters 2 and 3. The monitor is a filtered photodiode
placed near the lamp with no intervening optics and
records the lamp output at 540 nm (bandwidth is equal
to 9 nm). Since the lamp is the one element common to
the measurements with the CCD and the monitor, it is reasonable to suppose that the observed changes have occurred in the lamp. Therefore no adjustments have
been made to the responsivity in the database. One curious feature of Figure 6a is that filter 1 seems out of place, being less affected by the changes than filters 2 or 3, which are at longer wavelengths.
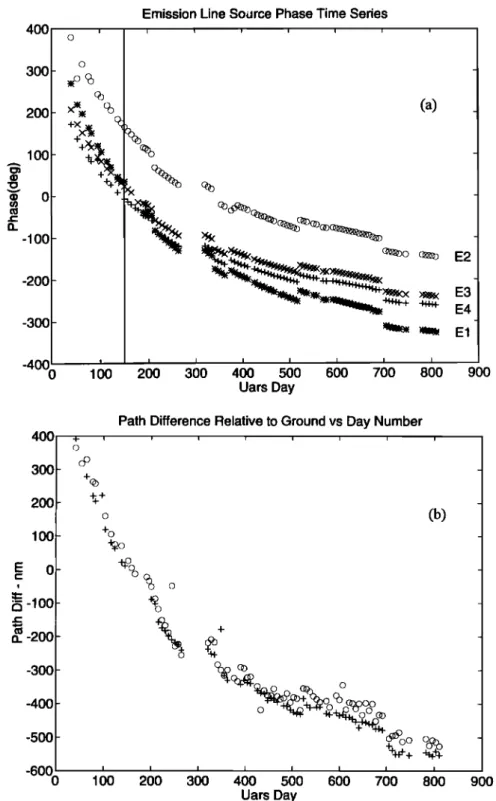
4.4. Long-Term Phase Drift
In addition to the expected small variations in phase due to thermal variations, a longer-term drift in the Michelson phase is observed which cannot be related to temperature. This drift was tracked using the weekly phase calibrations and is illustrated in Figure 7a for the
four emission line sources on WINDII, represented in
the figure as E1 (Kr 557.0 nm), E2 (Ne 630.5 nm), E3 (At 738.4 nm), and E4 (Ar 763.5 nm). Data are shown
for the first 810 days of flight, during which the phase changed by 450 ø to 6000 , depending on the wavelength.
The variation has the form of a relaxation process with
a timescale of about 225 days. The cause of the phase drift is not known but could be due to changes in the glass, the glue layers or dielectric coatings on the sur- faces, or a relaxation of the clamping pressure on the
interferometer. Gaps in the data correspond to times
when the UARS instruments were turned off. The sud-
den jumps in phase occur at resets, when the instru-
ment is powered on after having been turned off for
some reason, and the mirror alignment returns to a
slightly different setting. For each of these segments a new characterization database was constructed using
calibration data to account for the effect of these varia-
tions in phase. These changes have not had an adverse
effect on the Michelson 's ability to modulate emission
lines. The visibility of the laser source, measured during major calibrations, has remained above 0.9 throughout
the mission.
As mentioned in section 1, zero wind calibrations
were made on the ground prior to launch and are as-
sumed to be valid after launch. This assumption can- not be checked directly from the phase calibrations of
individual lines because of the possibility of changes
occurring in the interferometer during launch which
might cause phase wraparounds. This may, however,
be checked by considering the phase difference between calibrations at different wavelengths. This phase differ- ence is a slowly varying function of path difference and thus is much less susceptable to ambiguities than the phase of a single line.
The variations of phase differences (El-E2) and (E3-
E4) have been converted to changes in path difference
(assuming no dispersion) and are plotted in Figure 7b.
The agreement between the two curves is excellent and indicates that the assumption of no wraparound is cor- rect. The phase difference on orbit matches that on the
ground at day 151 for both cases. This date is indicated by the vertical line in Figure 7a. The ground phase dif-
ference does not match the phase difference on orbit at
day 0 because of the change in medium (air to vacuum)
in the interferometer gap between ground and orbit.
The results of this calculation indicate that the Michel-
son interferometer has been extremely stable with the
stresses of launch causing changes in the path difference of • 50 nm. Such changes are minimal and provide jus-
tification for the initial use of the ground calibration
data in orbit.
The gradual phase drift described here also implies
a drift in the zero reference because the phase calibra- tions and atmospheric measurements are made at dif-
ferent wavelengths.
In the case
of O•S the wavelength
difference is 0.7 nm, causing an effective shift of 9.5 m
s -• in the zero reference due to the observed increase
of 6000 of phase
(1.67 orders
of interference)
in the first
800 days of the mission. This effect is corrected in the
4OO 300 200 lOO -lOO -2oo- -3oo -
-4000
Emission Line Soarce Phase Time Series
i i 1 I i i o
+xx%
(a) _ I I I I I I I I 100 200 300 400 500 600 700 800 Uars Day E2 E3 E4 E1 900 4OO 30O 2OO lOO E O- i• -lOO- o. -200- -300 -400 -500 -Path Difference Relative to Ground vs Day Number i i i i i i (b)
•
o
0
I
I
I
-60
100 200 300
900
-t-o
-
_
o •' .•.
H++,•oO
•½+
•
o
-
I I I I I 400 500 600 700 800 Uars DayFigure 7. Long-term phase variation. (a) Phase as a function of mission time for the four
calibration sources, E1 to E4. (b) Path difference relative to prelaunch values, calculated from
E1 to E2 and E3 to E4.
4.5. Limb Heights in the WINDII Images
The tangent limb altitudes for the image elements in each WINDII field of view were computed using UARS orbital information combined with a knowledge of the relative orientation of WINDII with respect to
the spacecraft. The approximate orientation was deter- mined before launch, but more precise on-orbit values
were obtained using weekly sequences of WINDII star images.
Because of the requirement for precise absolute limb heights, redundant methods were employed to evaluate the transformation matrix relating the spacecraft frame of reference to the WINDII instrument pointing frame for each field of view. The matrix elements were de- termined by referencing the absolute WINDII inertial