Lecture acoustique de la voie ferrée
Texte intégral
Figure
![Figure 1.1 – Exemple de systèmes de mesures de rugosité du rail [Cléon 2010] ; règle déve- déve-loppée par la société Muller BBM (a) et le chariot « Corrugation Analysis Trolley »(CAT) développé par la société RailMeasurement (b).](https://thumb-eu.123doks.com/thumbv2/123doknet/12868237.369052/16.892.214.700.240.440/systèmes-rugosité-société-corrugation-analysis-développé-société-railmeasurement.webp)
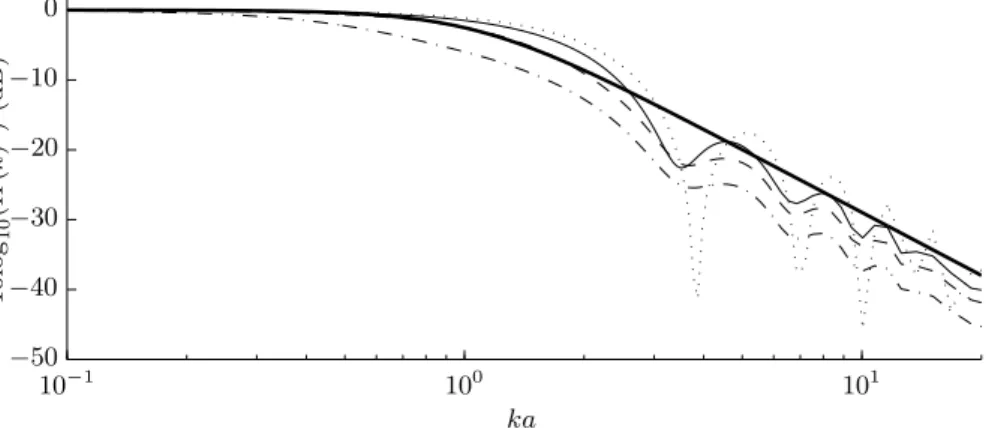
![Figure 1.9 – Coefficient de rayonnement de différents types de modes d’une roue fret de 920 m de diamètre par nombre de diamètres nodaux n [Thompson 2002].](https://thumb-eu.123doks.com/thumbv2/123doknet/12868237.369052/27.892.117.749.476.674/figure-coefficient-rayonnement-diamètre-nombre-diamètres-nodaux-thompson.webp)

Outline
Documents relatifs
L’ensemble des variations d’efforts observées pendant des essais a pu être caractérisé par les analyses mécaniques et cinématiques. Les incertitudes liées au taux de
Considérant dans ces conditions que l'accord du 20 décembre 1984 souscrit sous l'égide du Comité français du butane et du propane par l'ensemble des sociétés distributrices afin
MOLDOVA - Université de médecine et de pharmacie « Nicolae Testemiteanu » ROUMANIE - Université des Sciences Agricoles et Médecine Vétérinaire de Cluj-Napoca. GEORGIE
Reprenant l’idée d’une expérimentation de Kaneta et Murakami (1986), nous utilisons une machine bi- disques comportant un galet éprouvette fragile transparent, pour étudier
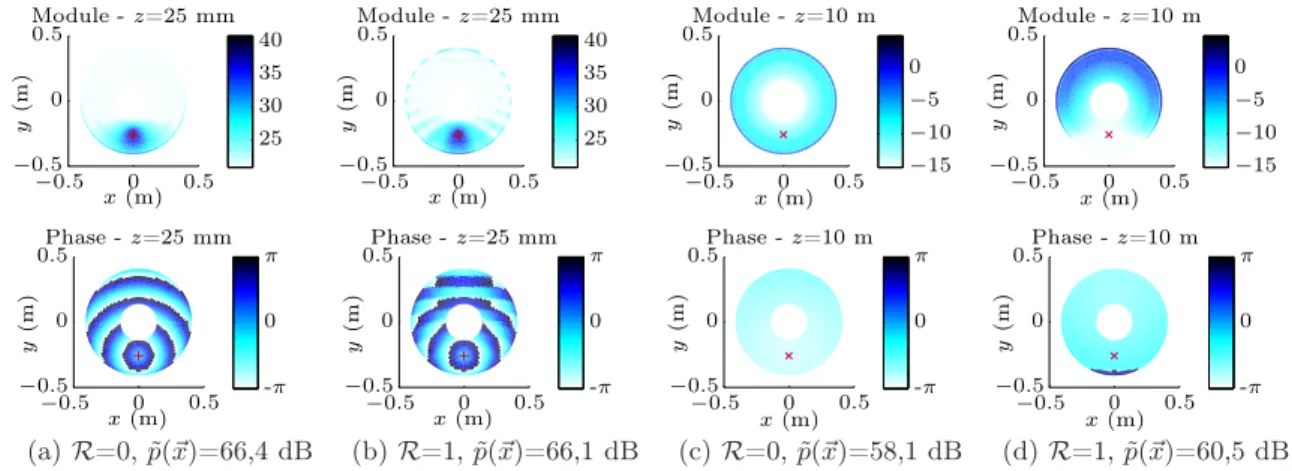
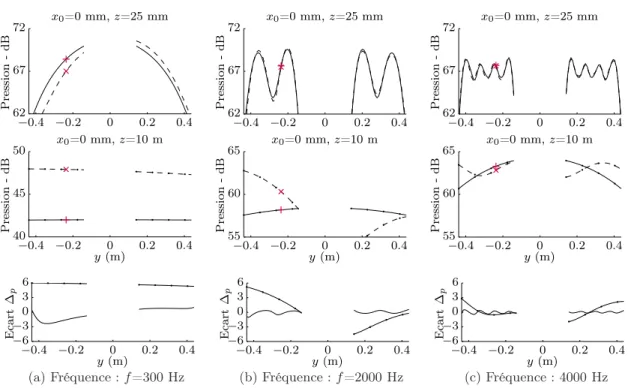
Le champ acoustique rayonn´ e pr´ esente des propri´ et´ es h´ et´ erog` enes qui d´ ependent de la fr´ equence, des amplitudes des forces d’excitation, ainsi que des
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
Dans ce papier, on propose une simulation quasi-statique et dynamique du contact roue/rail par la méthode des éléments finis, avec discrétisation de la surface de contact..
Rayonnement acoustique d’un bruit de contact intermittent entre l’extrémité d’une poutre et une plaque bafflée... 10ème Congrès
