Rëpublique Algérienne D'énnct atique
etpopulaùre
Ministère
del'Enseignement
Sapérii,ewr eû deLa
Recherche
scienffique
Universit,é
Mohammed ilieddll;
Ben yahia
-
Jij,el
Facuhté
dtzsSciences,et
de,la'.Technotogie
D ép arteme nt
al' E I e cilro,n iq u eflûétnoire
["f.,,tétutos
Wr
fot\tentlon
[u(Dipfue
[e
:îyla"stcr
I
I
en
tâh.ctraui$ts
Optùn: fr:hctrmipu
d^iwSlutàmes lÛmûarEués
llfrènry,e
:
cuntlùût
rttltfur
Présentépar:
Mr. AIMOURAbdelheq Mr. BENANE Djaafar Encadrénar
: Pr. BOUKABOU AbdelkrimPromotion
:
.lruin
!'0 1,8.Remprc",(pynpnts
lEn
préamfiufe
à
ce
mémoire,
nous
remercions
"nUra5ç qui
nous
a
aiîé
et
[onné,
fa
patfunce
et
fe
courage
[urant
ces
fongues
années
[étu[e.
ttfous soufraitons
a[resser
nos remelcientents
fes
ptus
sirrcères
au4
personnes
qui
nous
ont
apporté
ilbur
aille
et
qui ont
contrifiue
à
tékûoration
[e
ce
mémoire particu[ii^èrement: fuLr.
HlgytÛUqtassine
et
%.r.
SA%-,AJtfucfri[.
Ces remerciements
vont
aussi
atlltcorps
;professoraf
et
a[ministratf
[e
k
lFacufté
[es
Sciences
et
[e
k
11,'ecfrnofo,gie[e
f'Université [e
lijef
particufièrement
fe
fepartemmt
['éilbctronù7ue,
pour
k
ricfresse
et
fa
quafrté
[e
feur
enseignertent
et qui
[epfoùznt
[e gran[s
ffirts
pour
c$surer
à
feurs
étu[i"ants uneformatilnn
actuafrsée.
gVous
atressons
un
gran[
remercieînent
à
notre
enca[reur
fuh
Eoul(,gBou
Afi[ettrinx pour
noas drtoir proposé ce
projet fe
fin
[étu[es,
pour
ses
conseifs
et
ses d1:irective:ç
fu
[é6ut
à
k
fin [e
cetravaif
îr{os
vfs
remercisnents
vont
égnfemmt
duxmmtûres
[u
jury
pour
fintérêt
qu'ifs ont porté
à
notre
pro'jet
en
acceptant
fe4aminer
cetravai[.
{Enf*,
nous a[ressons
nos
pfus
sincères remercientents
à
tous
nos
procfres
et
amis,
qui
nous
ont
tou,iours
gncouragés
au
cours
[e
k
De
[ca,ce
Je
[é6ie
ce moalbste
havaif
à:
fl-
mes
parents, aucun
from,".,mage
ne
pourTait
être
à
k
frauteur
[e
f
amour
[ont
ifs
n,e
cessent
fe
me
com6fer.
eæ
"ALL,flft
kur
procure
6onne
santé et
fongu.e rtie.
fl
toute
mnfamiffe,
et
mes annis
qui
m'ont
encouragé
et
solttetnu,
14
mon
6inônc
Ajnofor
et toute
[a,famiffe (BET{VwIE.
lEt à tous ceuxqwi
ont
contri.ùué
[e
près ou
[e
foin
pour
(W
ce
projet
soitfaùr,
je
T)ons
ûis merci
3l-At!
ûrltJl
J-Jl
'rôft;l
'/
brel-,,Cre.-JI
,tt
rÉ
d,/r:iLù"e.?Jl
Ç:.ri
Gi*l-,cr0:.-J!
€Al,i
dt'$*JJ
éFT€ëtt:'rFJI
éù;J
&r*,rstç5
JI
d#l C.t*rcr
Ci"J!
çyf:P-
étif,J.
'l
II.4
Codages desCouleurs
...13
II.4.1
Imagebinaire
...131I.4.2 Itoage en niveau de
gris
...14II.4.3
Imagecouleur
...14II.5
Formatsd'image
...15II.6
Caractéristiques desimages
...16II.6.1
Pixel...
...16II.6.2
Résolution
...16II.6.3
Dimension...,.
...t6
II.6.4
Texture
...17II.6.5
Bruit...
...t7
II.6.6
Ltrminance
...17II.6.7
Contours ettextures
...17II.6.8
Histogftilnme....
...1711.6.9
Contaste
...19II.7
Traitementd'image....
...19II.8
Principales etapes de traitementd'images
...20II.8.1
Prétraitements...
...21II.8.2
Améliorationd'image...
...21II.8.3
Anatysed'image..,,...
...21II.9
Reconnaissance optique de caractères...,,...
...22II.10
Denx méthodes reconnaissance optique der caractères principales... ...22[.10.1
Correspondancematricielle...
...23II.l0.2
Exûaction decaractéristiques
...23II.11
Reconnaissance optique dechiffies
de plaqued'immafticulation...
...24il.11.1
Conversion ecouleurs.
...24lI.ll.2
Binarisation...
...25II.1l.3
Recherche de ligne debase...
...25II.11.4
Extraction decaractéristiques
...26[.11.5
Classification...
...26[.11.5.1
k plus prochesvoisins
...27Lll.5.2
Classificationstatique
...29II.11.5.3
Classificationadaptative..,,.,...
...30II.12
Conclusion
...30Chapitre
III
: Base de.Données r$ RéseauxIII.I
Introduction...
...31lIl.2.l
Qu'est-ce qu'une base de données?...
...31llI.2.2
Types de base dedonnées
...31IIl.2.2.l
Bases de donnéeshiérarctriques...
...32III.2.2.2
Bases de donnéesréseau...
...32ILI.2.Z.3 Bases de données
relatiorunelles...
...331II.2.2.4 Bases de données
objet...
...33III.3
Système de gestion de base dedonnées
...34III.3.I
Définirion.
...34IlI.3.2
Principes defonctionnement
...34III.3.3
Quelques SGBD connus etutilisés..
...35III.4
SGBDRelationnel...
...35[I.5
Éléments du modèlerelationnel
...36III.6
LangageSQL...
...39III.6.I
Définition.
...39lII.6.2
Résumé de quelques commandesl\dySel,
irnportantes...39III.6.3
Catégoriesd'instructions
...41III.6.3.1
Définir/créer unebase...,..
...41III.6.3.2
Modifier
unebase
...42III.6.3.3
Interroger unebase
...42III.7
Réseauinfonnatique...
...43IIl.7.l
Avantage de réseauxinformatique
...43III.7.2
Modèles deréférence...
...MIII.7.3
TCP...
...46III.7.3.|
En-têteTCP...
...46III.7.3.2
Établissement d'uneconne:rion.
...4g I1I.7.3.3 Timeout et retransmission...
...4g I1I.7.3.4 Fenêtreglissante
...4gIII.7.3.5
Contrôle deflux...
...4911I.7.3.6 Fermeture de la connexion
...
...50III.8
Adressage(IP)...
...50III.8.1
Définition.
...50III.8.2
Classesd'adresse
...S1III.8.3
Sous-réseau
...52IV.9
Étude duréseau
...53ry.9.1
Répartition des wilayas, des dai'ras et desconnmunes
...53I\1.9.2
Adressage
...55m.l0
Conclusion
...5gChapitre
[V
:outils
&
Hi.ésultatExpérimentaux
IV.l
Introduction...
...59IV.2
OpenCV...
...59IV.2.l
Définition
...59I\1.2.2
Fonctionnalités...
...59IV.3
Python[9]...
...60IV.4
Interfaces graphiquesutilisateurs...
...60IV.5
Radarroutier...
...61IV.s.l
Outils et matérielsutilises
...62IV.5.2
Lieux
detest
...64fV.5.3
Contraintes etproblèmes...,,,,.
...65fV.5.3.1
Contrainte de rayonnemernLt desoleil
...65IV.5.3.2
Problème decouleurs
...66fV.5.4
Détection des véhicules enmouveiment
...67fV.5.4.1
Soustraction defond...
...67N.5.4.2
Transformationsmorphologiques
...67ry.5.5
Détection de plaquesminéralogiques...
...6gIV.5.6
Reconnaissance descaractères
...69IV.6
Résultatsexpérimentaux
...69ry.6.1
Détection de la plaque à partir deJl'image
...691V.6.2 Reconnaissance des
chiffies...
...73lV.7
Conclusion...
...74Inûoduction
Générale...
...75Bibliographie...
...76Liste
des
figures
FigureI.l
Figure I.2 Figure I.3 Figure I.4 Figure I.5 FigureII.1:
FigureII.2
FigureII.4
FigureII.4
Figure II.5 FigureII.6
FigureII.7
FigureII.8
FigureII.9
FigureII.l
l
Figure II.12 FigureII.l3
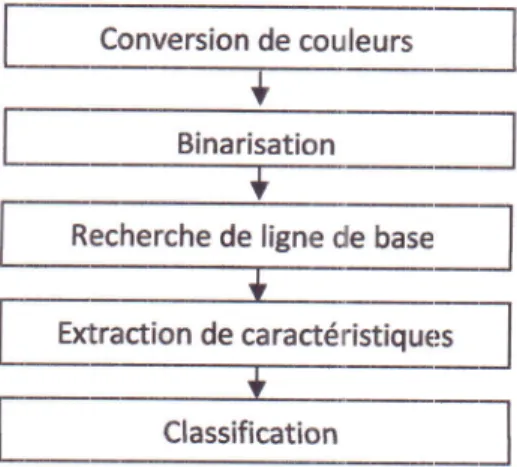
Try*
II.10
: Organigramme du fonctionnement du systènae de reconnaissance optique dechiftes
de plaqued'immatriculation.
,...
...:. ...24Détection de la plaque et l,exûaction des
caractères.
...3LAPI pour le contrôle
d'accès.
...7Gestion de
stationnements...
... g Gestion dutrafic.
...9Contrôle logistique transport
pesage.
...l0
Représentation d'une imagenumérlique.
... II
Imagevectoriel....
...12Image
matricielle.
...13Image
binaire...
... 13 Image niveau degris.
...14Image en
couleurs
...15Représentation d'une image avec difference
résolution
...16Histogramme d'une image niveau de
gris...,
...1g Histogramme d'une imageBGR.
...t9
Exemple de recherche d'une ligne de base àpartir des trois lignes des blobs. ...26(a) Image binaire typique du chiffir,e
,5'.
(b) Contour de(a).
...26: (a) Contour du number 2. (b) Approximation polygonale de (a)... ...26
Bases de données
hiérarchiques....,,...
...32Bases de donnees
réseau.
....,,...,...32Bases de données
relationnelles...
...33Bases de données
objet.
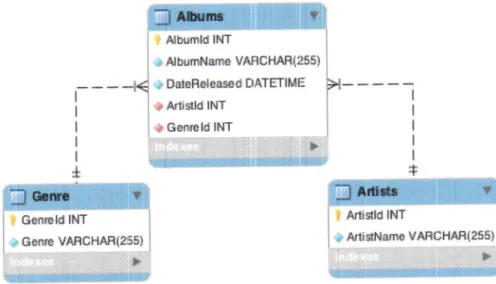
...34Clé etrangère dans un diagramme rclationnel
...
...3g Entête TCP...
...45Entête
UDP.
...45En-têtes dans le
réseau...
...46Schéma du réseau national des radars de contrôle
routier.
...55Première partie du
réseau...
...55Deuxième partie du
réseau...
...56Troisième partie du
réseau.
...56Quatrième partie du
réseau.
...57 FigureIII.I
FigureIII.2
FigureIII.3
FigureIII.4
FigureIII.5
FigureIII.6
FigureIII.7
FigureIII.8
FigureIII.9
FigureIII.l0
FigureIII.ll
Figurelll.I2
Figure III.13Figure
IV.l
: Formulaire de GUI duradar.
...61Figure
lY.2
: Radar de contrôleroutier.
...61Figure
IV.3
: Organigramme desystème.
...62Figure
IV.4
: Matérielsutilisés...
...63Figure
IV.5
: Passerelle de 3Km.
...64Figure
IV.6
: Illustration de la zone decapture.
...65Figure l\t|.7 : Plaque minéralogique affectée par: les rayonrs
solaires.
...65Figure
IV.8
: Plaque d'immatriculation entourée: directement par la couleur blanche. ...66Figure
IV.9
: Plaque placée dans un supportnoin:e.
...66Figure
IV.l0
: Détection d'objet en mouvement avec la soustraction de fond... ...67Figure
tv.l I
: Soustraction de fond avec les opré,rations morphologiques pour la détection Figurerv.l2:
Forme de plaque minéralogique .vue par notresystème.
...69Figure IV.13 :
a)
Images originale, b) Image en niveaudergris...
...70Figure IV.14 : Image en niveau de gris après le
lissage...,.
...70Figure tV.15 : Image en niveau de gris après le
lissage...
...71Figure
IV.l6
: Image finale duvéhicule
...71Figure
nI.l7
: Plaques détectées après transfornnation enbinaire.
...72Figure
IV.l8
: Application de I'algorithme de Cmny sur l"image au niveau de gris. ...72Figure tV.19 : Détection de plaques à I'aide de I'algorithme
Canny.
...73Figure fV.20 : Lecture de la plaque en
utilisant'l'esseract.
...73Liste
des
tableaux
Tableau II.1 : TableauItr.l:
Tableau ltr.2 Tableau III.3 Tableaultr.4
Tableau Itr.5: Tableaultr.6
Principales caractéristiqpes des principaux formats
utilisés.
... 15Schéma de
relation..
...J7Tableau montrant que la clé primaire ne peut pas être
réftéÊ.
... 3g Quelques commandesMySQL.
... 39 Principales caractéristiques des principaux fomratsutilisés.
...,...4gChamps de NetlD et de HostlD pour lkrs classes,A, B, et
C...,...,....
...52 Résumé sur les classesA,B,
et C..,...
...-...52Liste
des
abréviations
m
sb shkm
IP PCBD
Knn
FPS SYNACK
GTJI UDP TCPAGL
AVT
BGR
RGB OCR ROC SQLOQL
LCD
LDD
LCD
LMD
LAPI
SGBD OpenCV metre seuil bas seuil hautKilometre
Intemet Protocol Personal Computer Bases de Données k-Nearest Neighbor Fame Per Second Synchronization Acknowledgement Graphicat User Intefface User Datagramme P[otocol Transmission Contrôl ProtocolApplication
de Gest{onLAPI
AsiaVision
Technofogy Bleu Green RedRed Green Ble
Optical characters rqcognition
Reconnaissance Optique des Canactéres
Sfuctured Query La]nguage Object Query Langupge
Language de contrôlp de donneer;
Language de
définitibn
de donnr!,esLanguage de contrôlb des Transa,ctions Language de Maniprilation des Données
Lecture
Automatisel
de plaquesrl'knmaticulation
Système de Gestion pe Bases de lDonnéesOpen source Compufer
Vision
DUCrrOsf
Introductian Générale
Contexte
Le
numéro d'immatriculation
représenteun
rnoyen
efficacepour identifier
les véhicules- Parce que chaque véhicule a son pr,opre numtlro.Souvent,
il
est nécessaired'identifier
les plaquesd'immatriculation
des voiturespour
des raisons
de
sécurité.Les
informations
e,xtnaitespeuvent
être
utilisées
pour plusieurs intérêts, telles que I'accès etle
contrôle des ;[]ux,le
contrôle des frontières, la recherchede
véhicules susPects,le
contrôle
de la criminalité ou les
dépassements devitesse
sur les
autoroutes,etc.
C'estun
mo)/end'obtenir
desinforrnations
corîectes et indéniables auprès de I'auteur de I'infraction.Dans notre
projet,
nous nous intéressons àla
reconnaissance et àI'identification
automatique des plaques d'immatriculation à p:rrtir d'images prises à I'avant des véhicules, puis' nous comparons avec une base de données est-ce que la voiture dans son statut légal.
Problématique
et
objectif
La
waie
problématique pouridentifier
des plaqur:s cf immatriculation réside dans lefait
de
pouvoir faire
de
la
reconnaissanceoptique de
ca:actèressur
unepetite partie
d'imageextraite
de
séquences enregisffées,souvent dans
les cils de
grandevitesse
et
de
faibleluminosité.
De
plus,
le fait
d'avoir très peu
dimager; heuterésolution
par
secondesur
la plupart des caméscopes entraîneun
manque de nettetr5lors
dela
prise de ces images.pour
cel4
il
faut
procéderà
un
prétraitementde
ces
imagespour
révéler
les
contours, pour permettre la reconnaissance visuelle des caractèr,e,s.Ce que nous visons à travers notre
travail
est defaciliter
la
tâche,d'identification
descaractères
du
matricule en exploitant les
avantages quepeux
offrir
le
traitement d'image. Pour cela, ûous avons développe une applicationqui
consiste à réaliser des prétraitements, la détection etla
lecture automatique des caractèr€:s €t I'a.ffichage des informations du véhicule ilprès les avoir enregistrés dans un fichiertxt
ou >rml.Introduction Générale
Plan
de
mémoire
Pour cela, nous avons décomposé notre mtirnoire comme suit :
Dans
le
premier
chapitre, nous cofirmenrleronspar
définir la
lecture
automatique deplaques
d'imrnatriculation.
Ensuite, nous allonr; présenterles
algorithmesqui
doivent
êtreréalisés
pol[
quele logiciel
puisseidentifier
urre plaqued'immatriculation et les
diflerents systèmesqu'il
existe dans le marché.Enfin,
on présenter quelques exemples d'applicationde ce
type de système.
Dans le deuxième chapitre, nous allons abeirder les notions de base sur les images avec une étude sur le traitement d'images et les méthodes de reconnaissance optique de caractères.
Le
troisième
chapitre, nous citeronsun
c,ertainnombre d'outils utilisés
pour
réaliser notre propre système de détection.Dans
le
quatrième et dernier chapitre nous allons présenterun
certain nombre d'outils que nous avons utilisés pour mettre en æuwe notrc travailifnsi
que les résultats obtenus.itre
I
Chapitre
I
Le systèmeI/IPI
I.l
Introduction
Dans
ce chapifie,
nous al présenterle
systê:merde
Lectwe
Automatsee de
plaquesd'Immatriculation
(LAPI).
coest une m(lthode de rsurveillance quiutilise
la æchnique de la reconnaissance optique devéhicules.
sur des ilrrages pour
lire
les plaques d'immatriculation deL2
Définition
Le
systèmeLAPI
est une d'identilicatiorn qruiutilise
des techniques de traitement d'images et devision
par ordinateur exhair€, le nurmérod'identification
d'aprèsI'image
dela
plaque.
Le
logiciel
intègre reconnaissance en tempsréel,
de types de véhicules passant dans lenombreusss
innovations
algorithmiques permettant
la conrme denuit,
des plaquesd'immatriculation
de tousLe
systèmede
lecture plusieurs étapes :de
plaques d'Immatriculation
se
décompose eno
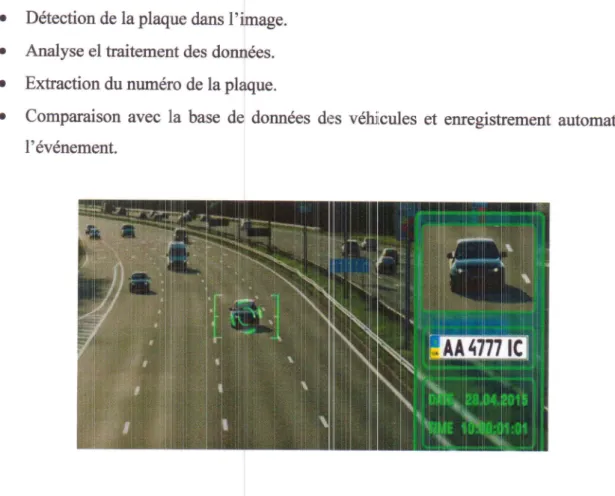
Acquisition d'image via le vidéo de la camera.o
Détection de la plaque dansI'
o
Analyse el traitement deso
Exhaction du numéro de lao
Comparaison avecla
basel'événement.
données drEs véhiicules
et
enregistrement automatique dela plaquer et I'exûaction des caractères.
3
de visio,n des caméras.
Chapitre
I
Le systèmeIAPI
I.3
Fonctionnement
du
systèqe
LAPI
Le
systèmeLAPI
permetd'idefrtifrer
et d'ernregistlrer les véhicules se présentant devant les caméras placées aux enfuées eVou softiesd'un
sihe. Une; base de données permet d'enregistrer au préalableles
listes
des plaquesd'i(nmaniculati,on
à
conLtrôler.Les
infomrations relatives
au conducteur et a son véhicule sontl'elregistrées
clans urire f,iche ouI'on
retrouve : nom et prénomdu
propriétaire,le
numéro d'immaqiculation
drrvéhicull, la
dateet
l.heure de
débutde
fin
d'autorisation
d'accèssur
la
zone
$ours
autonisés damsla
semaine),les inforrrations
sur
le véhicule.La
plaque
reconnueest
ensuite companle
ave,cla
basede
données.Selon
le
stafut doautorisation afifectéau
véhiculo,ulr
systèmerutomatique de
barrières se déclencheou
non. L'ensemble des données récuperées fors dela
dr5æction d"une plaque peutêfe
exporté vers unauûe sysême d'informations. L'utilfsateur
peul
égalerment effectuer des recherches selon les critères suivant : n"d'immatriculation, date et heutne dc drSbut etfin
d'autorisation[l].
I.4
Algorithmes
du
système
LAPI
Cinq
étapesdoivent
ête
réal,lséespour
rquel{]
logiciel
puisse
identifier une
plaque d'immatriculation :Localisation de la plaque : responsable de lrouver et d'isoler la plaque sur I'image.
Orientation et dimensionnement de la placlue : compensation de I'orientation de
tavers
de la plaque et ajustement des dirpensions à la.taille
nâ:essaire.Normalisation : ajustement de I'intensité ertdu contreste de I'image. Segmentation des caractères : [ocalisation des camctères sur la plaque. Reconnaissance optique de calactères.
La
complexité de chacune des étapesdu pogranrme
déterminela
précisiondu
système. Pendantla
troisième phase
(normNlisation), c,e,rtains systèmesutilisent des
techniques de détectionde
contourporn
augmente4le
contrasle entre le,sletfies
et la
couleurde fond de
la plaque. Unfilte
numérique peut auss!êfe
utilisé pour r(idurire le <bruit
> visuel de I'image.a o
o o o
Chapitre
I
Le svstèmeLAPI
L5
Diflicultés
du
système
LAPI
Le logiciel doit
être capable de gérerun
gpnd
nombre dedifficultés
possibles.parmi
cesdifficultés:
o
Une
mauvaiserésolution de I'image,
souvent parceque
la
plaque esttrop
loino mais parfois à cause de I'utilisation d'une camérade.mauvaise qualité.o
Des images floues, souventà
causedu
mouvelnent, très fréquentes sur les installations mobiles.o
Un
mauvais éclairage etun faible
contnrste à caurse d'une surexposition, d'unreflet,
ou d'ombres.I
Un objet obscurcissant une partie de la plaque, sou\rent une barre de remorquage, ou dela
poussière sur la plaque.r
Une police de caractèretrop
originale, chose fidiqurmte sur les plaques fantaisie (certains pays interdisent de telles plaqueso ce qui élimine le problème)I2l.
Si
certains de ces problèmes peuventêfie
nlsolus .parun
développementlogiciel, la
partiematérielle
du
systèmedoit
apporterla
plupart
rdessolutions
à
cesdifficultés.
Augmenter
lahauteur de la caméra peut permethe d'éviter cer&uins pnrblèmes avec des objets (comme d'autres
véhicules) obscurcissant
la
plaque,mais
cela arnène ert augmented'autes
problèmestels
que I'ajustement rendu nécessaire par la lecture de biais de l.a, plaque.f.6
Les
différents
systèmes
existants
De
nos
jours,
il
existe
de
nombreux
rsystèmes ded'immafticulation,
tels que :I.6.1 AutoVu
Le systeme de reconnaissance automatique des p.kqu,es
d'immatriculation
(RAPDAutoVu
automatise
la
lecture
et
I'identification
desplarpes d'imrnafiiculation
afin
que
les
forces
deI'ordre,
les
sociétéscoîlmerciales
et
les
municipalitésr pruissentlocaliser
plus
facilement
lesvéhicules
recherchéset
appliquer
les limites
rile strrlionmement.Conçu
à la
fois
pow
lesinstallations
fixes
et
mobiles,
le
systèmeAuto'v/u est parfaitement
adaptéà
toute une
série d'applicationset
d'entités, notammentles
forces
de
.l',ordre,les
municipalités
et les
sociétés commerciales[3].
Chapitre
I
Le système
IÀPI
T.6.2
LAPI
ENGIIitr
Le
produit
LAPI
ENGINE
représentelra
cærn
technologique permettant
la
Lecture Automatique de Plaquesd'Immatriculation
(LAI'I
-A\[PR).
Principalement dédié à la traçabilitéde
véhicules,LAPI ENGINE
estun
produit
autonorne pouvant s'adapterà un
large
éventail d'applications [4].I.63
SeeTecLe
module
LAPI
(Lecture Automatisée de Plaquesd'Immatriculation) de
SeeTec est unmodule
d'extensionde
SeeTec Cayugaqui
perrnetla
reconnaissance automatique de plaquesd'immatriculation
de véhiculesà
I'arrêtou
en nrouventent.Il
peutlire
des formats de plaques internationaux, même en caractères arabes et cyriltliquesi, sur jusqu'àhuit
voies de circulation par serveur.Le
module est
entièrementconfigrré
dansl"intlrface
utilisateur
SeeTecCayug4
la reconnaissancedes plaques d'immatriculation s'effectue
en
continu
ou
est pilotée
pax
un déclenoheur. Le moduleLAPI
de SeeTec peut être utilislé avec chaquecaneralP
prise en chargepar
SeeTecet
intégréeau
système.Même
dans des conclitionsde luminosité
difficiles,
il
est possible, pour une reconnaissance optimale,d'utiliser
cles camérasLAPI
speciales (camérasIp
ou caméras analogiques via des codeurs vidéo) [5].I.6.4
AsiaVision
TechnologyLimited (AVT)
C'est le premier fournisseur mondial de solurtions rtechnologiques et de solutions de gestion intelligente des véhicules et des conteneurs.
AVll
a été un pionnier dansle
développement et la fourniture de la technologie de reconnaissance optiique d,e czractères (OCR)t6l.
I.6.5 AGL (Application
de GestionLAPI)
Il
est
basé essentiellementsur
la
technol,ogieI-AllI,
le
but d'AGL
est de
pennetffe I'automatisation de processus pour les forces de l",ordre, nollamment parl'acquisition
de données au travers d'électronique[7].
Ces données peuvenrl ensuiite i]tre interprétées de differentes façonsallant de la
notification
simpled'information
(en c:roisarrt ayec des données internes), à une aideÇlspitgr
_-
_Lg:y:tèry:f,41!
I.6.6
SystèmeLAPI-Pryncar
Ce système permet d.'enrrlgistrer les plaques
d'inrmatriculation
dans son champ de visionr.L'immatriculation
du véhicule peut ainsi être lue: et conrparée aufichier
des véhicules enregistrér;dans le cadre
d'un
contrôle d'accès rlu d'une rechenche de véhicule [g l.I.7
Application
du
systènre
L,ApI
[.7.1
contrôle
d'accèsLe contrôle d'accès de vélhiculles est devenrr prin:r,ordial dans la pro,tection et la sécgrité der;
rStablissements
et
des zones dirtes<
sensiblesr.
Le
corrtrôle d'accèspar
reconnaissancede:
plaques
d'immatriculation
lperrnLet devérifier qu'un
vërhicurle est bien autorisé à pénétrer sur unc) ',zone.Le
contrôle
d'accèspar
reconnaissancec|:
plaquesr d'immatricuJlatiorn,contrairement aur
contrôle par badge ou biorniétrique permet d'amérl.iorer jle
confilrt
de I'usager à son arriv(ie surle,
site,
qui
n'a
plus à
se
soucierde
son identification. Cela permet
égalementde flui6ifier
la. circulation des véhicules aux entrées et sortiesd'un
rsite.FigurerI.2 : LAPI
pour Te r;orflrôlre d'accès.LAPI-ACCES
est une solution de contrôle cl'a;cès par'leofure de plaques minéralogiques et permet aussi une gestion multi-g:oupes et multi-poslr:s l'!)].ChaPitre
I
____
Le systèmeI-,lpI
I.7,2 Lagestion
du stationnement
La gestion du stationnement, que ce soit en zone publique urbaine ou en zone privée, sur des parkings
par
exemple,devient
indispensablteet
liénéfiquepour
améliorer
le
respect etI'application
des règlesmais
aussiafin
demietx
gerer retd'optimiser les
emplacements de stationnementdes véhicules.
LAPI
fournit
ders
so.lutionsde
reconnaissancede
plaquesd'immatriculation
embarquees, que çe soit pour des co.llec,tivités locales ou des professionnels comme des gestionnaires de parcs auûomobile [l0r].Figure
I.3
:
Gestion de stationnements.La gestion de stationnement utilisée le système
LI\PI
pour :ir
Améliorer le respect etl'application
des règleso
Identification
de
véhicule
çn
infraction
de
stationnement (depassement d'horaire, abonnement parking non misàjour,...)
o
Identification de véhicule recherché, abandtonné rou iindésirable,...I.7.3
Gestion detrafic
Læs communes et les
villes
ont de plus en plus besoirnd'optimiser
la gestion et le contrôledes voies de circulation
afin
:D'améliorer la
fluidité
de circulation desvihicules
De lutûer conûe les actes criminels et fiacer les véhicules recherchés
La
gestion
de
hafic
est donc
devenueune
composante essentiellepour les
villes
et cornmunesqui
souhaitent renforcerla
surveillançe dans les rueset
sur lesprincipaux
ar<es de circulation.o a
Chapitre
I
Le systèmeIIIPI
Le
système
LAPI
permet
une
gestionrde
tafic
par
reconnaissancede
plaquesd'inrmatriculation,
performanteset
simplesd'utilisation
pouvants'interfacer
dansun
systèmed'infonnations
et peuvent être installés sur des voies arrivant sur des ronds-points ou au niveau des feux de circulation sur les principaux axes de, circulation aux enfiées et sorties devilles
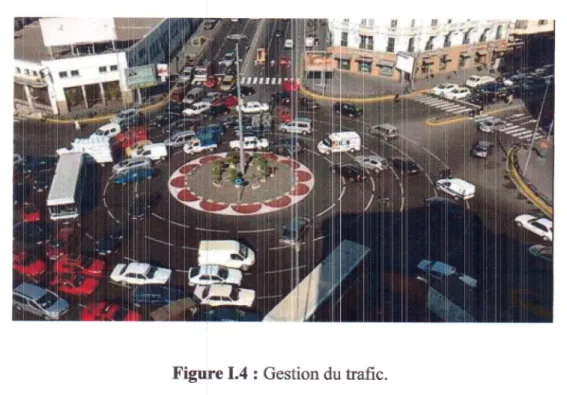
pour une gestion efEcace.figure
I.4
:
Gestion du.hafic.
Le
systèmeLAPI
propose des fonctionnatitéset
des paramétrages spécifiquesliés
aux traitements et àI'exploitation
des données recueill.ies[lill.
I.7.4
Contrôle logistique
transport
pesageAujourd'hui,
qu'il
s'agisse d'une plate-forrne logistiqrre, un parc automobile, une carrière ouun
site de production, tracer les véhiculesqui vont
et ,yiennent surun
site est devenu une composante importante dansI'amélioration
et l'o,ptimisation dela
sécurité, de la productivité et des performances des activités des transporteursindrx;fiels.
En effet, I'optimisation de
ces activités
prmsepar
la
maîhise des
diftrents
transits effectuéspar
les transporteurset
ceà
chaque étiape drr clrcle.le
systèmeLAPI
propose dessolutions
de
traçabilité
de
véhicules
par
reconnaisisancede
plaques d'immatriculation
Chapitre
I
Le systèmeI-/IPI
Les
solutions proposéessont
souples, modulairr"sr*
ont
étéfacilement à d'autres solutions << métier > :
.
Système de peséeindustielle
o
Système de suivi et de gestion logistiqueo
Système de contrôle d'accèsconçues
pour
s'intégrerFigure
I.5
: Conhôle logisrtJique transport pesage.I.8
Autres applications
La lecture automatique de plaques minéralogiques peut égalrement être utilisée pour :
o
les passages de frontière ;r
les stations-service (enregistement quand um clie:nt prart sans payer) ;e
le
contrôle
d'accès
des
parkings
ou
routes privées: ouverture
automatique,
ou enregistrementde
I'entrée(votre
plaque est
irnrpriméesur les tickets
de
parking
desaéroports et bien d'auftes parkings;
o
unoutil
de marketing pour effegistrer les nnLodes <le oonsommation ;o
les
systèmesde
gestion
de
la
circulatiorr,
qui
callculentla
vitessede
circulation
en mesurant le temps entre les passages devanl;deux points de lecture ;o
comparer les plaques d'immatriculations auL Fichier des véhicules volés(FW)
;o
comparer les plaquesd'immaticulations
auL Systàne d'information Schengen.o
les passages de péages autoroutiers (contrôles de paiement et recherches de véhicules)I.9
Conclusion
Nous avons vu dans ce chapitre la notion de lectu:re aurtomatique de plaques minéralogique
et
ses differents algorithmesqui
doivent
être réalisés frour quele logiciel
puisseidentifier
une plaque d'immatriculation et les dif|rcultés qui en ré:sulterr1..Chapitre
II
Troitement d'images&
OCRII.l
Introduction
A
piori,
la vision
de I'ordinateur dépend avanttout
de l'analyse des images prises parla
carnéra
pour
être ensuite fiaitéeset
prisesde décision.
lLa sciencedu
taitement
de
I'image a largement contribué au développement de la vision par orclinateur et résolu nombre de problèmesdiffrciles
à résoudre. Cequi
rendla vie
humainreplus
simple entant
que système de freinage automatique dans lesvoitures
après quela voilure
a
étéiidentifiée par
la
caméraà la
vitesse specifiée dans le feu de circulation ou ce qui est connu OCR.Dans ce chapitre, nous allons passer en revue quellques concepts de base des images et expliquer le traitement des images, nous allons aussi expliquer I'OCR et les applications les plus importantes.
II.2
fmage
numérique
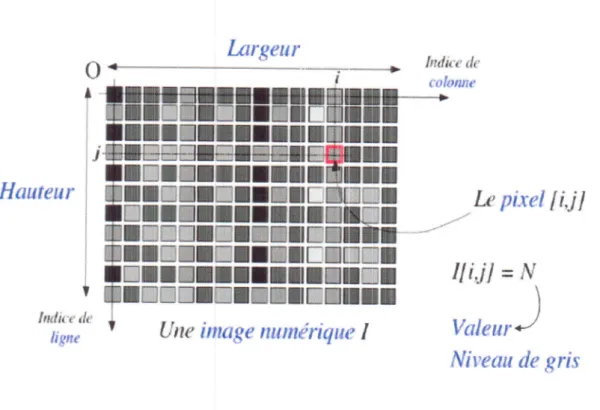
Une image numérique correspond simplemLent au nombre de
pixels qui la
composent. On peutI'exprimer
en nombre depixels
en largeur ou hauteur, ou en nombre depixels
global dans une image. Par exemple, pourl'image qui
sortd'un
appareil photo numérique, sadéfinition
peut être donnée sous la fomne 3000x2000 pixels ou alors 6 rné6;apixels.Largear
{rttliee de
mlannt
Hsuteur
Ix
pixet
{ijl
IIijJ
= N
t
Itxlice d* JignrWI@IITIffiIIIIII
Niveau de grus
Figure
II.1
: Représentation d'une irr,age numérique.Une
image num*triqu*
I
Valeur
11
TsIIIIIII
II@ItWtrillnxËffi$l
Clnpitre
II
Traitement d'images&
OCRII3
Types
d'images
II3.1
Images vectoriellesLe principe des images vecûorielles est de représenter les données de I'image à I'aide de formules mathématiques. Cela pennet alors
d'agandir
I'image indéfiniment sans perte de qualitéet d'obtenir un faible encombrement.
Par exemple pour décrire un cercle dans une irnage
il
suffrt de noterla
position de son centre et la valeur de son rayon plUtôt que l'ensemble des points de son contour. Cetlpe
est généralement obtenu à partir d'une image de synthèso creee par logiciel (oremple : Autocad) et non pas à partir d'un objet réel.4{P +,
F'igure
II.2
: Imagp vectoriel [13].Ce type est donc particulièrement adapté,pour le travail de redimensionnement d'images, la cartographie ou I'infographie [14].
n3.2
Images matriciellesUne image
manicielle
est formee d'un tableau de points ou pixels. Plusla
densité despoints sont élevée, plus le nombre d'inforrrations est grand et plus la résolution de lïmage est
élevée. Corrélativement la place ocçupée en mémoire et
la
durée de traitement seront d'autant plus grandes.Les
imagesvues
sur
un
écrande
téléviisionou
une
photographiesont des
imagesmaûicielles
[5].
Chapitre
II
Traitement d'images&
OCRFigure
II.3
: Imagpmatricielle
[16].II.4
Codages
des
couleurs
D'une
manière
génerale,une image
apperait commeune matrice
où
chaque casequi
contient des nombres associés
à
une couleur. l-lsuellementon
distinguetrois
grands types decouleurs pour une image numérique :
o
Le noir et blanc ;r
Les niveaux de gris ;o
Lacouleur.
Ces types sont généralement
à choisir lors d'une
numérisationpar
scannerou lors
de la confi guration d'un appareil photographique.II.4.1
Imagebinaire
Une image binaire est une matrice rectanp;rulaire dorrt les éléments valent
0
ou
l.
Lorsque I'on visualise unetelle
image, les zéros sont reprrésentris par desnoirs
et les uns par des blancsIr7l.
tA
pultl"rrut-E.le,::tronic
Figure
II.4
: Lnage binaire.Chapine
II
Traitement d'images&
OCR Dans les images binaires,il
est plus facile,de distinguer les caractéristiques sfucturelles.Par exempleo dans une image binaire,
il
est facile de distinguer les objets de I'arrière-plan.ïL4.2
Image en niveau degris
Le
niveau degris
estla
valeur del'intensité
lurnineuse en unpoint.
La
couleur dupixel
peut
prendre desvalews
allant
du noir
au blanc en
passantpar
un
nombre
fini
de
niveaux intermédiaires.Donc pour
représenter lesimag:s à
niveiaux degris,
nous pouvonsatfibuer
à chaquepixel
de I'image une valeur correspondant à la rluantité de lumiere renvoyée. Cette valeur peut être comprise par exempleente
0 et
255. rChaque p,ixeln'est
donc plus représenté par unbit,
mais par un octet. Pour cela,il
faut que le matériel. utiilisé pour afficherI'image
soit capablede produire les
diffrrents
niveaux de gris correspondant.Figure
II.5
: Imag,e niveau de gris.Le nombre de niveaux de gris dépend du nombrer de,bits utilisés pour décrire
la
"couleur"de
chaquepixel de
I'image. Plus ce nombre r:st
inqrorttan!plus les
niveaux
possibles sont nombreux.U.43
Imagecouleur (BGR)
Même
s'il
est parfois
utile
de pouvoir
rcprésente;rdes images
en
noir et
blanc,
les applications multimédiasutilisent
le plus souvenl, des irnages en couleurs. La représentation descouleurs s'effecfue de
la
même manière que les imagesi rnonochromes avec cependant quelques particularités.En
efifet,il
fauttout d'abord choisir
un morlèle de representation. Nous pouvons représenterles
couleursà
l'aide
de
leurs composantes primaires.Les
systèmes émettant de laChapitre
II
Traitement d'images&
OCRlumière (écrans doordinateurs,...) sont basés
surle
prinrcipe dela
synthèse additive: les couleurs sont composées d'un mélange de rouge, vert et b'l.eu (modèleBGR)
[18].Figure
II.6
:
Image en corileurs.II.5
Formats d'image
Lors de
son enregistrement une image est stockée suivantun format d'image
précis. Ceformat
doit
permetne
de
stocker l'information
de
I'image avec
un
minimum
de
perted'informations.
Il
existe ainsidiftrents
formats quipo'uront
favoriser soit la conservation de la qualité soit la diminution de lataille
du fichierinlbnnalique
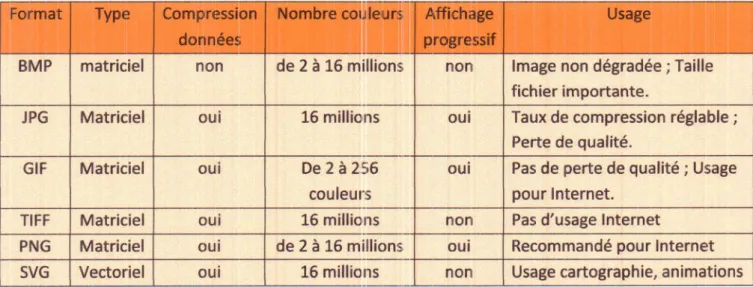
[19].Tableau
II.1
: Principales caractéristiques <iles principaux formats utilises.BMP matriciel non
de2à16millions
non lmage non dégradée; Taille fichierimportante.
JPG
Matriciel
oui 16 millicursoui
Taux de compressionréglable;
Perte de qualité.
6tF
Matriciel
oui De 2 à 25i6couleurs
oul Pas de perte de
qualité;
Usage pour Internet.TIFF
Matriciel
oul 16 milliorrs non Pas d'usage InternetPNG
Matriciel
ouide2à16millions
oul Recommandé pourInternet
SVG Vectoriel oui 16 millions non Usage cartographie, animations
Chapitre
II
Traitement d'images &. OCRII.6
Caractéristiques
des
images
Comme
nous I'avons
vuof
image est
unL ensemblesfiucturé
doinformationsparmi
sescaractéristiques nous pouvons citer les paramètes suivants:
II.6.1
Pixel
Le pixel
estle plus petlt
élément d'une image. C)haquepixel
correspondà
une
valetr
quelconque. Dans une imageà
echelle degris
de8 bits,
la
valeurdu
pixel
entre0 et
255.La
valeur d'un
pixel
àtout
moment correspondà
I'intensité des photons de lumière frappantà
cepoint.
Chaquepixel
stocke unevaleur
proportionnelleà
I'intensité dela
lumière à
cet endroit particulier [20].1I.6.2 Résolution
La résolution est ce qui
lle
lataille
à la dinnension. Cela correspond à la quantité de pixelsqu'il
y
a
sur une longueur donnée. Cettevaleur
s'exprirne enppp (point ou
pixel
par
pouce)taduit
en Anglais pardpi
(dot per inch). Plus celte valeur est élevée, plus la densité de pixels est importante et plusl'image
à du détail [21].Figure
II.7
: Représentationd'une,i*age
ariec difiËrence résolutionLa résolution pennet ainsi d'établir le rapErrt entre la
définition
en pixels d'une image et la dimensionreelle
de
sa
représentationsur
un
support prhysique(affichage
écran, impressionpapieu)1221.
II.6.3
l)imension
C'est
la
taille de l'image.
Cette
dernièrer se présrmte sousfomre de
matrice
dont
les élémentssont
desvaleurs nunériques
représerrtatives dles intensités lumineuses(pixels).
Le nombre de lignes de cette matricemultiplié
parle
nombre de colonnes nous donnele
nombre total de pixels dans une image [23].2O
dpi
23dpi
SOdpi
Chapine
II
Traitement d'images&
OCRn5.4
Texture
Une texture est une région dans une image
numérique
qui
a
des
caractéristiques homogènes. Ces caractéristiques sont par exemple unmodf
basiquequi
se répète. La texture est composée de Texel, l'équivalent des pixels [241.II.6.5 Bruit
Un bruit
(parasite) dansune
image
est
considén!comme
un
phénomènede
brusquevariation de I'intensité
d'un
pixel par
rapport
à
sesvoisins,
il
provient de
l'éclairage
desdispositifs optiques et électroniques du capteur [25].
II.6.6
Luminance
C'est
le
degré de luminosité des points der I'irnage.Elle
estdéfinie
aussi comme étant lequotient
de
I'intensité
tumineused'une
surfacepar I'aire
apparentede
cette surface,le
mot luminance est substitué au mot brillance, qui conespond àl'éclatd'un
objet.Une bonne luminance se caractérise
p.û
:o
Des images lumineuses (brillantes);o
Un bon conûaste :il
faut éviter les images où la gamme de conûaste tend vers le blanc ou lenoir;
ces images entraînent des pertes dre détails dans les zones sombres ou lumineuses.r
L'absence de parasites l-26].II.6.7
Contours
ettextures
Les contours représentent
la
frontière entre les objrots del'image, ou la
limite
entre deux pixels dont les niveaux de gris représentent une différencer significative. Les textures decriventla
stucture
de ceux-ci.
L'exfaction
de
contour consisteà
identifier
dansl'image
lespoints
qui separent deux texturesdifférenks
1271.II.6.8
llistogramme
L'histogramme
d'une
image represente les frâluences relatives d'occurrences de niveaux de gris. On compte chaque niveau de gris, et on expriime le nombre defois
qu'il
est présent sous forme de fréquence.Chapitre
II
Traitement d'images&
OCRDans
le
c:asd'une
image numérisée, c'estlune fonction
discrèteh(rr)
:
np
où
rk
est le ;.ième niveau de gris, el. np le nombre de pixets dansf
image avec ce niveau.L'histogrirmme
est normalisé endivisant
chac'unede
ses valeurspar
le
nombretotal
de pixelsK:
M*}tr
:p(rù:
npl\?
(2.r)
On peut considérer
p(r6)
comme une estirnation de,la
pr,obabilitéd'avoir
une occurrence du niveau de griLs rp.Le but
d,e <<I'histolfam
processing)
es1.de
rnoclifier I'histogramme
de I'image
sanschanger sa nahueo
mais en
améliorant des pafl,ies:
lpar exemple, augmenterles noirs
ou
les blancs,modifier
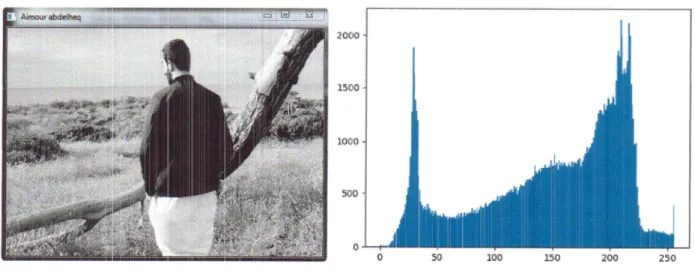
le contraste, ec;t [28].Figure
II.{f
: Histograûrme cl'une image niveau de gris.Pour les irnages en couleur plusieurs histogrammes sont nércessaires. Par exemple pour une image codée en RGB.
o
un histo€gamme représerrtant la distributio'n delil
luminanrceo
trois histogrammes :repr(isentant respectivement la clistribrrtion des valeurs respectives descomposantes rou.gesi, bleues et vertes.
Chopitre
II
Traitement d'images&
OCRX'iguro
II.9
: Histogftlm.me d'une image BGR.II.6.9
Contraste
Le contraste
est une
no,tion
qui
revierrtfréquenrment
lorsque
I'on s'intéresseà
Ia photographie: onjuge
le contraste d'une image, des logiciels permettent de le régler et même les capteurs et les objectifs ont unriile
à jouer. Ce bililet aborde toutes ces notions.Le contaste d'une photo est
lié
à la notion deluninosité,
instinctivement une image parait contrastée lorsqu'elle mêle des zones très lumineuses et des zonestès
sombres [29].Si
Ll
etL2
sont les degrés de lurninosité respectivemenLt d,e deux zones voisinesA1
etA2
d'une image, le contraste C est défini par le rapport :C_
LL_L,2LL+L.2 (2.2)
II.7
Traitement d'image
Le
traitement d'image est une méthode pour effectuerr certidnes opérations sur unei-ugr,
afin
d'obtenirune
image amélioréeou
d'en exûiaire des iinforrnationsutiles.
C'estun
type
detaitement
de signal dans lequel I'entrée estune
imageet
la
sortie peut être une imageou
descaractéristiques
/
caractéristiquers .tssociées à cette image.l)e
nosjours,
le traitement de I'imagefait
partie des technologies en croissance rapide.I[
constiitue également un domaine de recherche essentiel dans les disciplines de I'ingénierie et de I'infornratique.Chapitre
II
Traiternent d'images&
OCRLa
compréhensiondu
haitement d'images conunencepar
la
compréhension de ce qu,estune image.
Le
mode
et
les
conditions
d'acquiisitionet de
numérisationdes
images traitées conditionnent largementles
operationsqu'il
faudra rrgaliserpour extraire
deI'information.
Eneffeto de nombreux paramètres entrent en compte, les principaux étant :
o
La
résolution d'acquisitionet le
modede
codalgeutilisé
lors
dela
numérisation, qui détenninent le degré cle précision des érientuellesrmesures de dimensions.o
Les réglages optiques utilisés, (dont ta mise aupoint) qui
déterminent par exemplela
netteté de I'image.
o
Les
conditions
d'éclairage,qui
déternrinentune partie
de
la
variabilité
des images traitées.Quelques exemple de types d'informations
qu'il
est possibrle d'obtenir d'une image numérique :o
Laluminance moyenne.o
Le contraste moyen.o
Lacouleurprédominante.o
Le taux d'acuité moyen (précis ouflou).
o
Le taux d'uniformité des couleurs.r
La presence ou I'absence de certains objetsr [30].II.8
Principales
étapes de
traitement
d'images
Il
n'existe
pas
de
méthode
de
fiaitemerntd'images générale
à
tous
les
domaines d'application possibles.Il
faut
en général employer des algorithmes specifiques. Ces demierssont
souvent
des
combinaisons
de
techniquresclassiques (segmentation,
classification, reconnaissancede
frontières,
retc.).De
manièrro schrlm:rtique,toute
méthode
de
traitement d'images comprend 3 étapes majeures : [31].
Prétraitement des images..
Amélioration des ûnages..
Analyse des images.Chapitre
II
Traitement d'images&
OCRII.8.l
Prétraitements
Ils
préparentI'image pcfur
son
analyse ultérierurer.Il
s'agit
souvent d'obtenir
I'image théorique queI'on
await
dû
acquérir en I'absence de tourte dégradation.Ainsi,
ils
peuvent par exemple corriger :o
Les
défautsradiométiques
du
capteur
:
non
linéarité des
détecteurs.diffiaction
de I'optique, etc.o
Les défauts geométriques de I'image dus aru mocle dl'échantillonnage spatial, àI'oblicité
de la direction de viséeo au déplacement de lar cible, eto.o
Le filtrage ou
réductiorrde
fréquences prarasites,pff
exempledus à
desvibratons
du capteur.o
Les dégradations de I'image duesà la
pn5sence, de matière entrele
capteuret le milieu
observé.
II.8.2
Amélioration
d'image
Elle
a pourbut
d'améliorerla
visualisæion des irnages. Pour cela,elle élimine
/
réù;ntle
bruit
deI'image
etloumet
en (lvidence certains éléments (frontières, etc.) de I'image.Elle
est souvent appliquee sans connaissance àpriori
des élémerrts de I'image. Les principales techniquessont:
r
L'amélioration de contraste.o
Le filtrage
linéaire
(lissage, miseen
éviclence des frontières avec I'opérateur "hnage -Image lissée", etc.) et transformée de Fourrier pourfaire
apparaîhe/
disparaître certaines fréquences dans I'imags.o
Filtragenon linéaire
(filtres
médians, etc.) pourrétiminer
le bruit
sanstrop
affecter les frontières, etc.II.8.3
Analysed'image
Le but de
I'analyse d'images est d'extraire
et
de
rnesurer certaines caractéristiques deI'image traitée
en vue de
son interprétation. Ces
caractSristiquespeuvent être des
données statistiquessur
des comptes ntunériques (moyenne, histogramme,etc.),
ou sur
des données dérivees(ex.
dimensions,ou
orientation d'objetri
présonfii dansI'image).
En
général,le
typed'infonnation
recherché dépend du niveau de conuraissanc$ requispour
interpréter I'image. LesChapitre
II
Traitement d'images&
OCRapplications
dans
le
domaine
du
guidage
et
de
la
télédétection nécessitentsouvent
desconnaissances différentes
et
de plus haut niveeu (ex.,
cartes3-D)
que dansles
domaines du médical, dela
géologie, du corrtrôle de qualité, etc. Ainsi., rm robot en déplacement ne nécessite pasle
mêmetype d'information
qu'un systèmeutilist!
prour détecterla
présence de matériaux défectueux.Pour ce dernier,
il
faut
p,rendre uniquemerrtla
dlécision"non
défectueuxou
défectueux".Cette décision
peut
être
prise
à
partir d'un
":raisonrnex0ent"plus ou moins
complexe
(e.g. détection dela
présence de rair:s d'absorption caracteriistiques d'une impurete). Pour lerobot,
il
faut simuler le processus décisircnnel dl'un indiviclu en clép.lacement, ce qui nécessite au préalablede reconstituer une carte du lieurde déplacement en temps réel, avec les obstacles à
éviter [32].
II.9
Reconnaissance
optique
de
caractères
([tOC)
:La
reconnaissance optique de caractères (Optical. chraracter recognition) estla
conversion élechonique d'images de texte clactylogaphié, mimuscrit o,u imprimé en texte codé par machine,de
sorte qu'elles
puissentêtre
stockr5esde
manière plurs compacte,facilement
recherchées, affichées et éditées [33].La
reconnaissanceoptique
de
r:aractères est unLe rnéthodetrès
utile et
populaire
dans diverses applications,elle
est largement utiliseepour
<nnvertir desliwes
et
des documents enfichiers
électoniques
pour une utilisation
dans
l'^naûysede
documents.La
reconnaissance optique de caractères permetdlrppliquer
des techmiques terlles que la traduction automatique, la synthèse vocale et lafouille
de texte à lapage capturée /numérisee[34,35].
La précision de La reconnaissance optique rle carircttlres peut dépendre des algorithmes de préhaitement et de segmentationL de I'irnage.
II.10
Deux
méthodes reconnaissance
opfique
de caractènes
principales
Les
approchesde
la
reconnaissance des caractàressont
généralement diviséesen
deux méthodes très différentes. Ce sont la correspondance matricielle(Matrix
matching), dans laquelle I'image mappée d'un caractère correspond directement àl urr ensemble de modèles; etI'extaction
de
caractéristiques (Feature extr,action'),où
une structure de niveau supérieurdu
caractère est trouvée et comparée à un standard [361.Chapitre
II
Traiternent d'images&
OCRil.10.I
Contspondance
matricielle
La
correspondancede
matrice tentede
r:connarîtreles
caractèresen
utilisant le
niveau d'information le plus bas possib,le.L'idée de base de la méthode d'appariement
matriciel
est defixer
urrc cellule de caractèrespour
contenir
un
tableaude
rn par
n
pixels
carrés. UnLéchantillon
der chaque caractère est présentéà
la
machineet
chaqtrepixel
est numérisé enutilisant un simple
seuillage ennoir
et blanc. Ces échantillons de modêiles contre lesquels tous les caractères inconnus sont testés.Lorsqu'un
caractère inconnu est présenté à.la machiine, chaquepixel
est seuillé ennoir
etblanc. Les
pixels
correspondarttssont
ensuite comparés dans chaque modèle.Le
nombre depixels
correspondant ànoir
por:rnoir
ou blanc pour blanc; est compté. Le: caractère inconnu est alors reconnucorlme
étant celui avec lavaletr
der correispondance la plus éilevée [36].n
lA.2 Extraction
decaractéristiques
L'extraction de caractéristiques est un
terme
généralqui
couwe de nombreuses techniquesdiftrentes pour
exftaire
desinformations de niveau
supérieursur
un
oaractère, dansle
but d'obtenir une indépendance de police [36].L'extaction
de caractéristiques est le processus de û'ansformation des données d'entrée en une représentation réduite.Il
est communément urtilisé quandil
y a trop de donnees d'entrée pourtaiter
efficacementou
si les données d'entrée sont redondantes (beaucoup de données mais pas beaucoupd'informations). Cette
simplification
desdonrées
d'entréefoumit une
description précise d'unplus
gf,and ensemtrle de données. L'ensenrble des caractérisliques dépendantes de I'application est généralement chroisi par les expert;s du domaine [37].Le
systèmede
reconnaissanceoptique cle
caractèresextrait des
caractéristiques du personnageet
fait
l'énoncédu
caractère (Statementof
the
character)(l'énoncédu
caractère est considéré comme une représentation réduite de celtui-ci).L'énoncé du caractère inconnu est comparé aux énoncés pour les caractères standards sur lesquels