Achieving resonance in the Advanced LIGO gravitational-wave interferometer
Texte intégral
Figure


Documents relatifs
To assign a systematic uncertainty from the model used to describe the detector resolution, the fits are repeated for each step replacing the Hypatia functions by bi- furcated
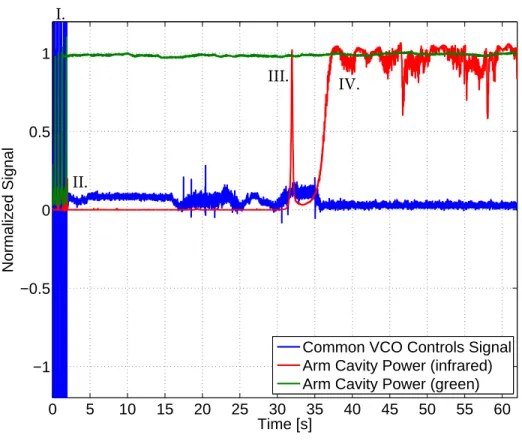
Lock acquisition of the recombined ITF: when the Fabry-Perot cavities are locked and the dark fringe power goes down a given threshold, usually half of the maximum power, the trigger
In the following, we describe in more detail the galaxy catalogs that we use, quantify the probability that the host galaxy for each event is in the galaxy catalog that is used for
The low threshold discriminator gives the time reference (figure 6) as long as the delay between the avalanche precursor and the streamer signals is less than 10ns, as
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
For example, we know that the two main operators of the quantum mechanics, the momentum operator p = ∂x ∂ and the position operator q = x, form a noncommutative algebra with
Considering that the electromagnetic field is a special case of the gravitational field [10], the structure of which has the character of a standing gravitational wave for
We refer to this for- malism (or class of alternative theories) as a multiple Lagrangian framework because for these theories the trajectories of massive bodies (classical particles
