Near-Field Photometric Stereo in Ambient Light
Texte intégral
Figure


Documents relatifs
photodissociation amplitudes to different magnetic sublevels of the fragments. This results in large differences between classical and quantum results for the degree of
g disc is obtained through the learning of the various patterns from all the strategies, and the minimization of the classification error between a cover bag and a stego bag
Whereas the Module B consists in describing the type of the article according to a technical documentation and test results and in assessing the conformity of
In the case of avant de and sans, the English translation is often a conjugated verb (Before they left), or a present participle (Before leaving), rather than the English
As parameters of the spacecraft at the moment of recording by an optical device are unknown, the problem of the fundamental matrix determination using the
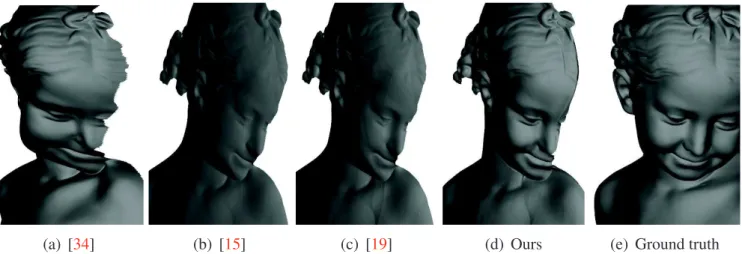
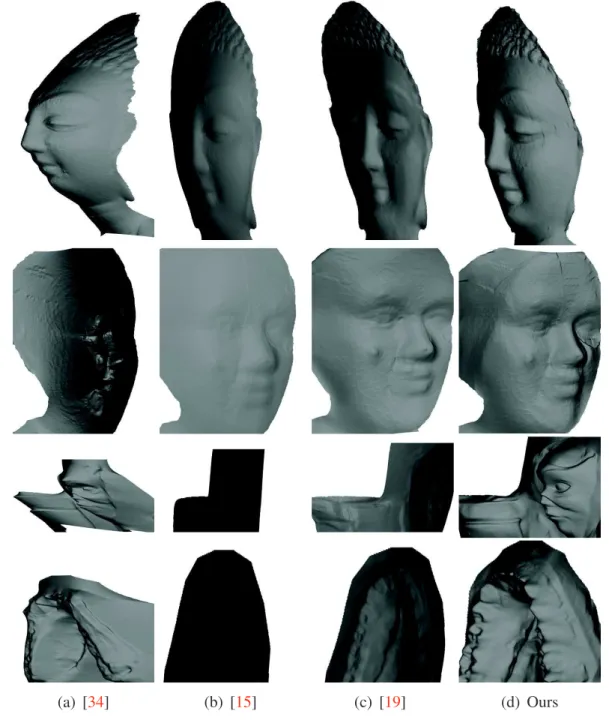
Since there is no coupling between the normals estim- ated in two neighboring pixels, those estimates are the op- timal local explanations of the image, in the sense of the estimator
General numerical methods, such as the finite element method (FEM), the Method of Moments (MoM), and Finite-Difference (FD) methods, Partial Element Equivalent Circuit (PEEC)
Environmental side effects of the injudicious use of antimicrobials in the era of COVID-19 Muhammad Usman Iftikhar, Muhammad Umar Farooq, Khalil Hanna.. To cite this version:
