N° d'ordre : /2009/DM
RÉPUBLIQUE ALGÉRIENNE DÉMOCRATIQUE ET POPULAIRE MINISTÈRE DE L’ENSEIGNEMENT SUPÉRIEUR
ET DE LA RECHERCHE SCIENTIFIQUE
UNIVERSITÉ
DE
BATNA
F
ACULTE DESS
CIENCES DE L’I
NGENIEURD
EPARTEMENT DEM
ECANIQUEMEMOIRE PRESENTE POUR L’OBTENTION DU DIPLOME DE
MAGISTERE
EN
MÉCANIQUE
Option : C
ONSTRUCTIONM
ECANIQUEPAR
AOUGELLANET
K
HADIDJA_________________________
Optimisation dynamique des couples moteurs d’une
main mécanique articulée non anthropomorphe à
quatre doigts
_________________________
Travail effectué au sein de laboratoire de recherche en productique (LRP)
Soutenu le: 02/06/2010 devant le jury composé de :
Président : Zidani Kamel (MC) UHL. Batna Examinateur :
Benmohammed Brahim (MC) UHL. Batna Bouchelaghem Abdelaziz (MC) UBM. Annaba Louchene Ahmed (MC) UHL. Batna
Remerciements
Avant tout, je remercie le grand Dieu d’avoir guidé mes pats sur le bon chemin.
J’exprime ma profonde gratitude à monsieur BARKAT Belkacem, Professeur à l’Université de Batna, pour la patience et l’aide qu’il m’a accordé en tant que promoteur de thèse et pour la qualité scientifique du travail qu’il a proposé.
Je remercie Monsieur ZIDANI Kamel, Maître de conférences à l’Université de Batna, pour m’avoir fait le plaisir de présider ce jury de thèse.
Mes remerciements vont à Monsieur BOUCHELAGHEM Abdelaziz, Maître de conférences à l’Université de Annaba, pour m’avoir fait l’honneur d’être membre de mon jury de cette thèse.
Je tiens à exprimer ma profonde reconnaissance à Monsieur LOUCHEN Ahmed, Maître de conférences à l’Université de Batna, pour avoir fait partie de ce jury.
D’autre part je remercie vivement Monsieur BENMOHAMMED Brahim, Maître de conférences à l’Université de Batna, pour avoir participé à ce jury.
Que mes amis soient aussi récompensés par des grands merci, pour m’avoir apporté leur soutien et la chaleur humaine dont j’avais tant besoin.
Et par delà de tous mes remerciements, un grand merci à mon marier et ma famille pour leurs soutien et encouragements.
Sommaire
CHAPITRE I: Etude bibliographique sur les architectures des
systèmes mécaniques articulés………...1
Introduction générale………..1
I.1 Introduction...……….3
I.1.1 Le robot et la robotique…...3
I.1.1.1 Type de tâche et secteurs d’application………..….4
I.1.1.2 Degré de liberté d’un robot………..….7
I.1.2 Types d’architecture des SMA (Systèmes Mécaniques Articulés)...9
I.1.2.1 Architecture série (ou chaîne cinématique ouverte)………...9
I.1.2.2 Architecture parallèle (ou chaîne cinématique multiboucle)……….9
I.1.2.3 Architecture mixte……….9
I.1.3 Les variétés de prise……….10
I.1.3.1 La prise en puissance………...12
I.1.3.2 La prise en précision………....12
I.2 Mains mécaniques de la littérature………...12
I.2.1 Main de Barrett
……….12I.2.2 La main SARAH
………13
I.2.3 La main du DLR ……….14
I.2.4 Main mécanique articulée de LMS…...………..14
I.2.4.1 Les caractéristiques techniques………..15
I.2.4.2 Planification d'une tâche de manipulation………16
I.2.5 La main Robonaut ………..17
I.2.6 main d'Ultralight………..18
I.2.7 main Gifu III………....18
I.2.8 La main de Shadow ……….19
I.3 Récapitulatif des caractéristiques des mains mécaniques analysées…...21
CHAPITREII: Etude bibliographique sur la modélisation dynamique
de la saisie d’objet par une main mécanique
articulée………...22
II.1 Introduction ………...………....22
II.2 Méthode d’obtention du modèle dynamique ………..23
II.2.1 Le Formalisme de Lagrange………..………...23
II.2.2 Le Formalisme de NewtonEuler
…...………25II.2.2.1 Présentation théorique du formalisme…...………..25
II.2.2.2 Cinématique d’un point quelconque du bras manipulateur …….26
II.2.2.3 Les efforts d’inertie d’un corps dans un SMA.………31
II.2.2.4 Expressions mises en œuvre d’un calcul automatique………35
II.2.3 Principe des travaux virtuels de d’Alembert……….37
II.2.4 Notion « d’énergie d’accélération » ou fonction de Gibbs……...38
II.2.5 Modèle de la puissance filtrée………38
II.2.6 Modèle de Y. F. Li et al ……….40
II.2.7 Modèle de Kensuke Harada et Makoto Kaneko ………...41
II.2.8 Etude de Akio Namiki et Masatoshi Ishikawa ………...44
II.3 Conclusion………...46
CHAPITRE III: Modélisation dynamique de la saisie par la main
mécanique articulée LRP-Hand..………...47
III.1 Introduction ...………...………....47
III.2 Description de la main LRP………..47
III.2.1 Conception de la paume ………..48
III.2.2 Conception du pouce………49
III.2.3 Conception de l’indexe……….50
III.2.4 Conception des doigts longs……….50
III.2.5 Récapitulatif des caractérestiques de la main (LRP hand)……51
III.4 Formulation et mise en équations…………..………..54
III.5 Applications ………..62
III.5.1 Saisie d’un objet parallélépipédique………….………..62
III.5.1.1 Les vitesses angulaires ……….65
III.5.1.2 : Les accélérations……….66
III.5.1.3 Les couples actionneurs………...68
III.5.2 Saisie d’un objet sphérique ………..…...69
III.5.2.1 Les vitesses angulaires ……….70
III.5.2.2 Les accélérations………...72
III.5.2.3 Les couples moteurs………..73
III.5.3 Saisie d’un objet cylindrique.…………...………...75
III.5.3.1 Les vitesses angulaires ……….76
III.5.3.2 Les accélérations ………..78
III.5.3.3 Les couples moteurs………..79
III.6 Interprétations et Conclusions……….………...………….81
Conclusion générale et perspectives..
………...……...82
Références bibliographiques...83
CHAPITRE I
Etude bibliographique sur les architectures des systèmes
mécaniques articulés
I.1 Introduction
La souplesse de la main humaine permet une variété dans la configuration spatiale des doigts et permet également une importante diversité dans les différentes prises envisageables.
La première partie de ce chapitre montre les différentes architectures des SMA (systèmes mécaniques articulés).
Dans la seconde partie nous présentons les différents types de prises possibles et finalement nous citons quelques exemples des mains mécaniques articulées développées par les différents laboratoires à travers le monde.
I.1.1 Le robot et la robotique
Un robot est un dispositif mécanique articulé capable d’imiter certaines fonctions humaines telles que la manipulation d’objet ou la locomotion, dans le but de se substituer à l’homme pour la réalisation de certaines tâches matérielles. Cette réalisation est plus ou moins autonome selon les facultés de perception de l’environnement dont est doté le robot. La robotique est l’ensemble des activités de construction et de mise en œuvre des robots.
Par extension et abus de langage on qualifie quelque fois de « système robotisé » tout dispositif « automatisé ».
On peut dire aussi que tout dispositif pour « faire quelque chose » comporte une partie
« opérationnelle » ou « opérative » qui réalise la tâche et une partie « décisionnelle » ou « commande » qui contrôle la partie opérationnelle. Ce qui fait une des différences entre la
robotique et l’automatisation en général est justement la partie opérationnelle qui est, dans le cas de la robotique, un système mécanique articulé.
I.1.1.1 Type de tâche et secteurs d’application
Selon le type de tâche et le secteur d’application, le robot aura une architecture mécanique et un système de contrôle-commande différents.
Dans les industries manufacturières, les robots sont utilisés principalement aux tâches suivantes :
Manutention de pièces (chargement de machines outils, transfert de pièces d’un tapis roulant palettisation, etc.). Le robot Figure I.1 doit pouvoir effectuer des mouvements souvent simples mais rapides, après avoir saisi un objet connu à un endroit connu pour le déposer à un autre endroit connu. La précision de positionnement de l’objet n’a pas besoin d’être grande. La manutention des pièces peut se faire par un robot de type bras de manipulation à poste fixe si la zone de travail est limitée. Au contraire si le transfert doit se faire d’un bout à l’autre de l’atelier, on aura recours à un robot mobile constitué d’un chariot à roues évoluant dans un environnement généralement connu (chariot filoguidé…).
Figure I.1 : Robot de manutention des pièces
Soudage (point à point ou en continu) Figure I.2. En soudage point à point, la difficulté est souvent un problème d’accès sans collision aux éléments qu’il faut
souder (exemple : carrosserie automobile), le robot fonctionne en boucle ouverte. En soudage continu, il faut assurer une bonne précision de la trajectoire et au besoin, le robot doit être doté d’un capteur de suivi de joint. Cependant, compte tenu des vitesses de soudage, le robot n’a pas besoin d’être rapide.
Figure I.2 : Robot de soudage
Peinture. Le pistolet de peinture étant léger, un robot de peinture sera généralement moins rigide qu’un robot de soudage ou de manutention, il doit être animé d’une grande vitesse.
Assemblage. Les pièces à assembler, le plus souvent de type pige-alésage, sont connues et leurs emplacements également. L’exigence ici est une très grande précision de positionnement dans le cas d’un robot d’assemblage en boucle ouverte, ou mieux un robot moins précis mais doté d’un dispositif qui s’accommode ou qui corrige les défauts éventuels de positionnement (vision ou détection d’efforts) Figure I.4.
Figure I.4 :Robot d’assemblage
Les quelques tâches citées peuvent être menées en ambiance normale ou en milieu hostile, ce dernier cas justifie l’emploi de systèmes télécommandés.
A un moindre degré, d’autres secteurs sont intéressés par le développement des robots. Citons la robotique médicale, dans laquelle le robot est destiné à se substituer à une fonction déficiente chez un handicapé, ou à aider le chirurgien dans une opération chirurgicale. Citons également la robotique militaire où les besoins se situent plutôt dans le domaine des robots mobiles (locomotion à roues, à pattes, à chenilles…) évoluant dans un environnement inconnu et sur sol accidenté. Citons enfin les robots spatiaux et sous-marins qui doivent concevoir des robots pour manipuler des objets dans des conditions extrêmes de température ou de pression.
Cependant la technologie est très différente selon les secteurs d’application et les tâches indiquées.
I.1.1.2 Degré de liberté d’un robot
Il est bien connu que, dans l’espace, la situation d’un solide est entièrement définie par un jeu de 6 paramètres indépendants. Les plus classiques sont les 3 coordonnées cartésiennes d’un de ses points et 3 angles définissant l’orientation d’un repère lié au solide par rapport à un repère fixe. Supposons que ce solide soit mû par un SMA motorisé. Cela peut être un objet transporté par les robots manipulateur (a), (b), (c) à poste fixe de la Figure I.5.
Figure I.5 : Architecture des robots manipulateurs
L’objet transporté et manipulé par le robot mobile de la Figure I.6
Figure I.6 : Architecture d’un robot mobile
4 5 6 q q q 3 q 2 q 1 q E R 0 R (a) 4 5 6 q q q C 2 q 1 q D A B 3 q (b) 1 q i A i B (c) 2 q 1 q
La plate forme du robot marcheur de la figure 1.7.
Figure I.7: Architecture d’un robot marcheur
Ou l’objet manipulé par la main S mécanique articulée de la Figure I.8.
Figure I.8 : Architecture d’une main mécanique articulée
Il est clair que dans chaque cas, pour maîtriser la situation du solide, SMA doit être doté d’au moins 6 liaisons à 1 d.d.l. (degré de liberté) motorisées et asservies en position. On dit aussi que le SMA doit avoir au moins 6 actionneurs. Le nombre d’actionneurs représente ce qu’il est d’usage d’appeler le d.d.l. du robot. Sur la Figure 1.5, les liaisons motorisées sont celles auxquelles sont associées les variables articulaires q de commande. C’est un moyen de i
distinguer les liaisons actives des liaisons passives.
I.1.2 Types d’architecture des SMA (Systèmes Mécaniques Articulés)
La façon dont les liaisons motorisées sont réparties du bâti au solide terminal définit trois grandes classes d’architecture des SMA. Reportons-nous à nouveau à la Figure I.5.
4 A (3) (2) 4 B 4 C (4) (1)
q
q 2 3 qI.1.2.1 Architecture série (ou chaîne cinématique ouverte)
Il n’y a qu’un chemin possible pour aller du bâti à la pince, les segments du robot ainsi que les liaisons sont bien mises « en série ». Toutes les liaisons pivots sont actives. Celles-ci doivent être correctement agencées pour maîtriser complètement la situation de l’objet saisi, ce qui est le cas du robot à 6 d.d.l. Pour ce robot série, on utilise l’expression « robot 6 axes ».
I.1.2.2 Architecture parallèle (ou chaîne cinématique multiboucle)
Pour aller de la pince au bâti, il y a 6 chemins différents et sur chaque chemin, une seule liaison active prismatique. Ce dispositif, ou des variantes sensiblement équivalentes, est connu sous le nom générique de plate-forme de Stewart. Les liaisons en A et i B sont des i
liaisons sphériques passives (afin d’éviter la rotation de l’ensemble A B autour de l’axe i i
passant par le centre des deux rotules, on peut remplacer la rotuleA par une liaison cardan). Il i
est moins évident que dans le cas précédent de se rendre compte qu’ici aussi les variations des 6 paramètres q provoqueront les 3 mouvements de translation et les 3 mouvements de i
rotations de la pince.
L’intérêt de l’architecture parallèle sur l’architecture série est une meilleure répartition des efforts autorisant une structure mécanique légère, par contre le volume de travail de la pince est beaucoup plus petit.
I.1.2.3 Architecture mixte
On dit aussi série-parallèle ou parallèle-série selon la prédominance de liaisons en série ou en parallèle.
Pour le robot manipulateur (b) présentant une boucle cinématique, si on part de la pince, on rencontre 3 liaisons pivot actives en série de paramètresq q q , puis deux liaisons pivot 6, 5, 4 actives en parallèle q et 3 q , enfin en série la liaison pivot active 2 q . Les liaisons pivot en B, 1
C, D sont passives. Les liaisons en série dominent, c’est donc un robot manipulateur série-parallèle, on dit aussi « à une boucle ».
C’est aussi le cas du robot mobile Figure I.6 qui compte 8 d.d.l les 6 d.d.l du bras de manipulation d’architecture série et les 2 d.d.l q et 1 q du chariot en parallèle. On voit 2
apparaître ici une particularité, en ce sens que le nombre d’actionneurs est supérieur à 6, il y a donc, à l’évidence, une redondance de 2 actionneurs pour définir la situation de l’objet
manipulé, si toutefois les 8 actionneurs agissent en même temps. Cette redondance peut être mise à profit pour augmenter la capacité de manipulation dans un environnement encombré.
Pour le robot marcheur Figure I.7, la plate-forme est reliée au bâti par 4 chaînes cinématiques identiques en parallèle (les pattes), chacune d’elles, telle queA B C , comporte 3 i i i
liaisons pivot motorisées et une liaison de contact C (assimilée à un contact ponctuel avec i
frottement). Le robot marcheur est donc parallèle-série à 12 d.d.l il y a 6 actionneurs redondants, ce qui exige ici et contrairement au cas précédent, une bonne coordination des mouvements des moteurs pour éviter la perte de contact ou le glissement sur le sol tout en faisant avancer la plate-forme. Ceci constitue une particularité importante de ce type de SMA. Une autre particularité apparaît quand le robot lève une patte, cette fois il n’y a plus que 3 boucles et une chaîne ouverte. On a affaire à un système dit « topologie variable ».
Pour la main articulée Figure I.8, on peut faire le même type de constatations que précédemment – redondance à maîtriser, topologie variable quand 1 ou 2 doigts quittent l’objet – avec en plus la position des points de contact objet doigts qui peut évaluer au cours du mouvement de manipulation de l’objet [2].
I.1.3 Les variétés de prise
Malgré l’impressionnante diversité des prises susceptible d’être employer par la main humaine, il n’existe au final que deux types de saisie, la prise en puissance et la prise en précision. La Figure I.9 illustre les différentes prises possibles par la main humaine [17].
I.1.3.1 La prise en puissance
Chez l’homme, l’opposition du pouce avec l’ensemble des autres doigts permet d’envelopper l’objet et de le bloquer à l’intérieur de la paume. Avec ce type de saisie, nous avons une surface de contact très importante qui facilite la transmission d’efforts élevés.
C’est pourquoi ce type de saisie est utilisé pour la saisie d’objets lourds, mais par contre il ne donne aucune liberté de mouvement local de l’objet par rapport à la main.
I.1.3.2 La prise en précision
Le principe de la prise en précision ou la manipulation fine est de conserver les six degrés de liberté en translation et rotation de l’objet. L’utilisation du bout des doigts permet de réaliser pleinement la saisie en précision car nous avons une plus petite surface de contact entre chacun des doigts et l’objet.
Notons que la faible surface de contact provoque une faible transmission des efforts rendant cette prise inappropriée pour les objets lourds [1].
I.2 Mains mécaniques de la littérature
Dans cette partie on présente quelques mains mécaniques articulées selon les degrés de libertés qu’elles possèdent (nombre des doigts et nombres d’articulations) et aussi suivant le taux de similarité anthropomorphique qu’elles représentent par rapport à la main humaine.
I.2.1 Main de Barrett
La main de Barrett, produite par Barrett Technology en 1988, est basée sur une conception développée à l'université de Pennsylvanie. C'est une main mécanique composée de trois doigts. Chaque doigt possède deux articulations pivot Figure I.10. Un doigt est fixe et les deux autres peuvent s’écarter jusqu'à 180 degrés par rapport à la paume (le doigt 3 est le doigt fixe et les doigts 1 et 2 tournent autour de la paume), et ceci d’une manière synchrone. La main est commandée par quatre moteurs qui activent sept liaisons au total [1].
Figure I. 10: Main de Barrett
I.2.2 La main SARAH
La main SARAH (Self-Adaptive Robotic Auxiliary Hand), est une main à trois doigts comme celle de la main de Barett en 1995. Cette main est installée sur la station spatiale internationale [4].
Le but visé par cette main est la saisie des objets dans l’espace. Les trois doigts sont synchronisés de telle sorte qu’ils s’ouvrent ensemble ou se ferment ensemble. Cette main est motorisée par seulement deux moteurs indépendants, un pour l’ouverture/fermeture et un autre pour l’orientation des doigts. Cette main possède 10 articulations et caractérisée par une aptitude de manipulation d’objet importante Figure I.11.
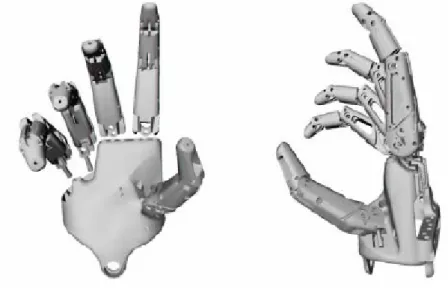
I.2.3 La main du DLR
La main DLR, développée au centre aérospatial Allemand en1998, est une main robotique articulée à quatre doigts. A la différence de la main de Barrett, et de SARAH, le placement des doigts ressemble à la structure de la main humaine Figure I.12. Cependant, parce que tous les moteurs sont contenus à l’intérieure de la main, celle-ci a environ une taille 1.5 fois la taille d'une main humaine moyenne. Les doigts sont identiques. Chacun se compose de trois articulations : une première liaison de type cardan à la base, puis deux liaisons à un degré de liberté de type pivot. La main DLR est actionnée par 12 moteurs microfluidiques. Dans chacun des 4 doigts, trois articulations peuvent être contrôlées indépendamment. La dernière articulation étant couplée dans un rapport fixe avec celle qui la précède comme dans la main humaine [6].
Figure I.12 : Main DLR
I.2.4 Main mécanique articulée LMS
Le LMS a conçu en 1993 une main mécanique articulée à 4 doigts et 16 degrés de mobilité et développé sa commande pour conduire des recherches sur la manipulation fine d'objets sous contrôle d'efforts.
I.2.4.1 Les caractéristiques techniques
La main LMS possède 4 degrés de mobilité par doigt (3 pour les mouvements de flexion-extension et 1 pour le mouvement d'abduction-adduction. Avec son implémentation anthropomorphe des doigts sur la paume, la main permet de reproduire les configurations de prise caractéristiques de la main humaine.
La structure mécanique est en alliage léger d'aluminium. Les 16 articulations sont commandées indépendamment par 16 motoréducteurs électriques à courant continu logés dans l'avant-bras. La transmission entre les 16 actionneurs et les 16 articulations est assurée par des câbles en polyéthylène.
En ce qui concerne l'instrumentation, la main mécanique est dotée d'une part de codeurs incrémentaux placés sur les axes moteurs et d'autre part de potentiomètres absolus intégrés aux articulations. Des capteurs tactiles matriciels tout ou rien implantés sur les phalanges permettent la localisation des points de contact entre l'objet saisi et la main.
L'architecture matérielle et logicielle du système de contrôle de la main est basée sur l'utilisation de cartes d'interface sur bus VME et l'environnement multitâche temps réel OS/9.
Cette architecture de contrôle a permis l'implantation des algorithmes nécessaires aux contrôles en position et en effort.
Une approche originale est présentée en matière de contrôle. Celle-ci intègre le comportement non linéaire des tendons et des gaines de transmission dans les contrôles en effort et en position de la main mécanique Figure I.13 [6].
Figure I.13 : La main de LMS
I.2.4.2 Planification d'une tâche de manipulation
Afin de simuler les tâches de manipulation, l'outil de CAO robotique SMAR développé au LMS [1993] a été mis à contribution. Un nouveau module dédié à la main du LMS a été intégré. Une stratégie générale de contrôle de la manipulation a ainsi été développée au sein de cet outil en considérant la planification de la tâche des points de vue de la géométrie et de la stabilité de la prise, avant d'être validée expérimentalement sur la main mécanique [5].
Figure I.16: Prise entre les quatre bouts de doigts
I.2.5 La main Robonaut
La main Robonaut a été développée par la NASA au centre de l'espace Johnson en 2000. Cette main possède 5 doigts et un total de 14 degrés de liberté. Sa taille est équivalente à 95% à celle d’une main humaine Figure I.17. L'index, le majeur et le pouce sont considérés comme les doigts primaires de manipulation. Ils sont capables de réaliser les mouvements d'abduction et d’adduction. L'annulaire et l'auriculaire sont décalés par rapports aux autres doigts ce qui leurs donnent la capacité de s’enrouler autour de l’objet à saisir. Ils sont capables d’exercer des efforts de serrage importants. Cette main comprend 14 moteurs au total situés tous au niveau de l’avant-bras [1].
I.2.6 La main d'Ultralight
Développée en 2001, elle comporte 5 doigts avec au total 13 degrés de liberté, 18 liaisons et le pouce est opposé aux 4 autres doigts.
Figure I.18 : Main d'Ultralight
La taille de cette main est légèrement supérieure à celle de la main humaine, chaque doigt pèse environ 20g. La main est capable de saisir des objets en puissance comme en précision [1].
I.2.7 La main de Gifu III
Développée en 2001 au design complètement anthropomorphique, comporte 5 doigts dont un pouce opposé aux autres, chaque doigt à 4 liaisons et 3 degrés de liberté (dernière phalange couplée par un système 4-barres). Le pouce possède 4 ddls. La main comporte au total 20 liaisons et 16 ddls. Les doigts sont conçus comme des unités indépendantes, facile à remplacer.
Figure I.19 : La Main Gifu III
Cette main respecte l’échelle humaine, les doigts font 21cm depuis la base de la paume. Chaque doigt pèse 200g. Le pouce pèse 250g. Le poids total de la main est 1,4Kg.
La main est capable de saisir des objets en puissance, et en précision, et aussi de faire des manipulations. La main Gifu I développe 8,8N en bout de pouce et 1,1N en bout de chaque doigt. Quant à Gifu III, elle développe 3,4 en bout de pouce et 3,4N en bout de doigt , mais avec une vitesse de 240°/sec [1].
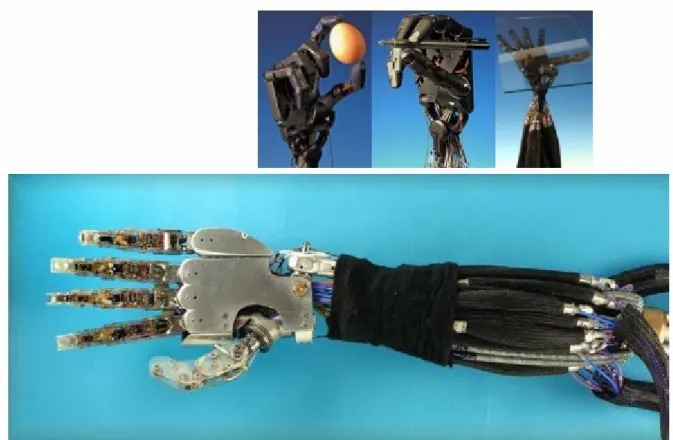
I.2.8 La main de Shadow
Cette main créée par la compagnie Shadow Robot en Angleterre en 2002, à ce jour c’est la main robotique la plus proche de la main humaine. Elle contient 24 degrés de liberté qui sont contrôlés par des muscles pneumatiques situés tous au niveau de l’avant-bras
Figure1.20. Cette main robotique peut être utilisée dans plusieurs applications : téléprésence,
mobilité virtuelle, industrie etc. Les liaisons des doigts sont actionnées par des muscles pneumatiques antagonistes. Par contre, quelques articulations sont actionnées par un seul muscle et le mouvement opposé se fait à l’aide d’un ressort.
Figure I.20 : Main dextre de Shadow
Il faut noter qu’il existe d’autre mains mécaniques articulées à travers les laboratoires du monde vu leur ressemblance avec les mains précédemment mentionnées tel que la main anthropomorphique ACT, créée par l’Université de Carnegie Mellon à Pittsburgh, la main DART créée aussi par la NASA et d’autres [3]. le tableau I.1 récapitule les caractéristiques des mains mécaniques articulées.
I.3 Récapitulatif des caractéristiques des mains mécaniques analysées
Les résultats d’analyse des mains citées sont résumés dans le tableau I.1. Où on constat
l’utilisation de déférents modes de commandes et mécanismes de transmission
Caractéristiques Nom de la main Type des actionneurs Nbre de doigts ddl Mécanisme de transmission
Main de barrett Electrique 3 7 Câble
Main de SARAH Electrique 3 10 Câble
Main de DLR Electrique 4 12 Câble
LMS Electrique 4 16 Câble
Main Robonaut Electrique 5 14 Câble
Main de Shadow Pneumatique 5 24 Muscle Pneumatique,
ressort
Main d’ultraligt pneumatique 5 13 Commande directe
Main de Gifu III Servomoteurs
intégrés 5 16
Engrenage à vis sans fin
Tableau I.1
: Caractéristiques des mains mécaniques analysées
I.4 CONCLUSION
A travers cette étude bibliographique, nous avons montré les différents types de prises possibles. Nous avons également donné un aperçu sur la robotique et les différentes architectures des SMA. Ensuite nous avons présenté quelques mains mécaniques articulées de la littérature. Nous avons constaté que chaque concepteur cherche une dextérité proche à celle de la main humaine tout en simplifiant la conception et la commande appropriée.
CHAPITRE II
Etude bibliographique sur la modélisation dynamique de la saisie
d’objet par une main mécanique articulée
II.1 Introduction
Le modèle dynamique a pour but la commande des actionneurs. Quand la vitesse augmente sa précision diminue car on ne peut plus négliger les phénomènes de modélisation délicate tels que : élasticité, jeux, frottements…
Les effets « parasites » sont générateurs d’oscillations (élasticité d’une transmission à câbles ou à rubans), de vibration, de retard dans les déplacements, d’imprécision finale (jeux et frottements).
Le modèle dynamique doit rester observable et gouvernable afin que le contrôle d’une vitesse plus au moins élevée soit possible. Celui-ci étant non linéaire, certains paramètres doivent être évalués « en ligne » d’où des problèmes pour les calculateurs « temps réel » du point de vue de la vitesse et de la capacité des calculs.
Si la main se déplace très lentement ou la manipulation d(objet en elle-même est très lente. Les forces dynamiques qui s’exercent sur le système (objet/main) sont négligeables, par contre pour les grandes vitesses de déplacement du système (objet/main) ou celle de l’objet manipulé par une main mécanique articulée, les forces dynamiques deviennent significatives, entraînant des déviations de trajectoires, des vibrations et des contraintes mécaniques importantes aux articulations. Dans ce cas, les modèles géométriques (commande en position) et cinématiques (commande en vitesses) sont inadaptés.
Il est nécessaire d’étudier le modèle dynamique d’un SMA (système mécanique articulé) en tenant compte des forces inertielles, de Coriolis, centrifuges et bien sûr des couples moteurs. Dans le cas de manipulation rapide d’objet par une main mécanique articulé ou son déplacement à grande vitesse par une main placée sur un robot.
Le but de la modélisation dynamique est de déterminer les forces ou les couples à appliquer aux articulations pour obtenir à tout instant la configuration désirée du manipulateur. On écrit :
f q q q f
, , , e
(2.1)Où Γ: est le vecteur forces/couples généralisées , ,
q q q : désignent respectivement les coordonnées, les vitesses, et les accélérations
généralisées.
II.2 Méthode d’obtention du modèle dynamique
Les principales méthodes actuelles d’obtention du modèle dynamique sont basées sur l’un des quatre formalismes suivants :
Le formalisme de Lagrange Le formalisme de Newton Euler
Le principe du travail virtuel de d’Alembert
La notion d’énergie d’accélération on fonction de Gibbs[13]
II.2.1 Le Formalisme de Lagrange
Le formalisme de Lagrange est utilisé surtout pour construire le modèle dynamique direct, il ne présente que peu d’intérêts pratiques. On utilise généralement ce modèle pour la simulation des mécanismes poly-articules libres
Les équations de mouvement issue du modèle de Lagrange s’écrivent, en absence d’efforts extérieurs et de frottement comme suit :
(2.2) i=,...,n i i i d L L dt q q
Où :
i
: Couple moteur de la ème
i articulation L : Lagrangien du système égale à E - Ec p
c
E : Energie cinétique totale
p
E : Energie potentielle totale n : Nombre total des articulations
L’énergie cinétique du système est une forme quadratique des vitesses articulaires :
(2.3)
Où H q
est la matrice
n n
d’inertie du système, elle est symétrique et définie positive. Ce formalisme permet d’écrire les équations de mouvement en termes de travail virtuel et d’énergie directement sous une forme matricielle [16] :(2.4)
Avec : H
: Matrice d’inertie du bras manipulateur
B
: Matrice des termes de Coriolis
C
: Matrice des termes centrifuge
Q : Vecteur des forces de gravité
ext
F : Vecteur des forces extérieures
1 2 1 3 ... 1 n 2 3 ... n 1 n
qq q q q q q q q q q q
2 2 2 2
1 2 ... n
q q q q
Les expressions des éléments des matrices B et C sont données par les relations suivantes : (2.5) (2.6)
t c 1 E = q H q q 2 2 H *q B *qq C *q Q Fext , ij ik jk i jk k j i H H H B q q q , 1 2 ij jj i j j i H H c q q II.2.2 Le Formalisme de Newton-Euler
Ce formalisme est très adapté pour construire le modèle dynamique inverse. Il
présente un intérêt pratique indéniable aussi bien pendant la conception que lors de l’exploitation. En effet ce formalisme porte sur le calcul des torseurs complets de liaisons et permet donc le dimensionnement de la structure et des actionneurs. Le caractère itératif de ce formalisme réduit énormément le temps de calcul relativement au formalisme de Lagrange et permet l’exploitation des résultats, par une commande évoluée (commande en couple), pour améliorer la précision dynamique.
II.2.2.1 Présentation Théorique Du Formalisme
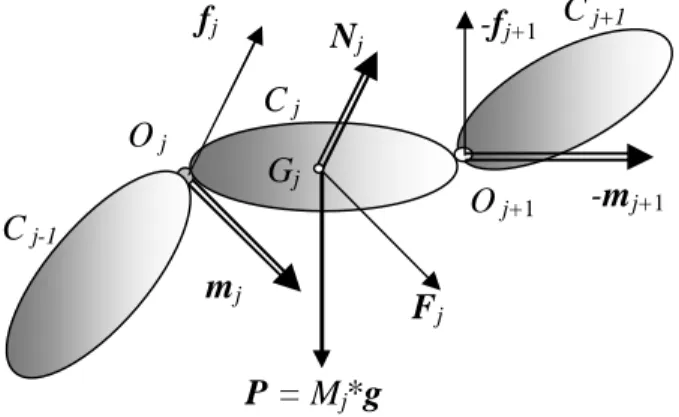
Considérons l’ensemble des (n+1) corps rigides d’une chaîne cinématique ouverte
Figure II.1 et dans lequel chaque articulation Aj n’admet qu’un seul mouvement de rotation
ou de translation.
Chaque corps Cj de lachaîne cinématique est en équilibre sous l’action :
Des efforts de liaison dus au corps en aval (le corps Cj+1)représenté par un torseur,
réduit au point Oj+1, de résultante (-f j+1) et de moment résultant (-m j+1).
Des efforts de liaison dus au corps en amont (le corps Cj-1)représenté par un torseur,
réduit au point Oj , de résultante ( f j ) et de moment résultant ( m j).
Des efforts d’inertie dus au corps Cj lui-même, représenté par un torseur, réduit au
point Gj centre de gravité du corps Cj, de résultante ( F j ) et de moment résultant ( N j).
Figure II.1 : Les efforts appliqués sur le corps Cj du bras manipulateur
O j O j+1 C j fj -fj+1 mj -mj+1 Gj Nj Fj P = Mj*g C j+1 C j-1
La condition d’équilibre du corps Cj s’exprime par les deux relations ces après : Formule de NEWTON : fjMj g fj1Fj 0 (2.7) Formule de EULER : mj O Gj j
Mg
mj1NjO Gj j FjO Oj j1fj10 (2.8) L’évaluation des efforts d’inertie dus au corps Cj lui-même passe par une étudecinématique générale qui permet d’exprimée la position la vitesse et l’accélération de n’importe quel point P du bras manipulateur par rapport au repère {R0}.
II.2.2.2 Cinématique d’un point quelconque du bras manipulateur
Soit P un point fixe appartenant au corps Cj du bras manipulateur, et de coordonnées x,
y et z dans le repère {R j} attaché au corps Cj. OjP est le vecteur position du point P dans le
repère {Rj}. La cinématique instantanée du point P est définie par sa position, sa vitesse et son
accélération par rapport au référentiel {R0} attaché à la base du manipulateur.
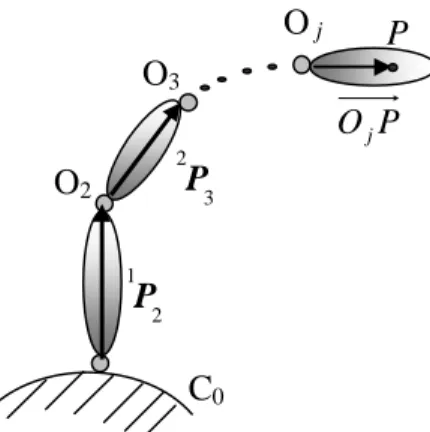
a) Position du point P dans le repère {R0 }
Le point P est repéré, à tout instant dans le repère de base {R0} par le vecteur O0P.
Figure II.2 : Position d’un point P du corps Cj dans le référentiel de base {R0}
C0 2 1 P P O ,O O2 O3 O j 3 2 P P Oj
Le point P appartient au corps Cj , d’où : 1 0 1 Pi 1 1 i -i i j j i j i j O P O O O P O P i i
(2.9)b) Vitesse du point P dans le repère {R0}
Le vecteur vitesse du point P appartenant au corps Cj s’obtient par dérivation de son
vecteur position O0P donné par l’expression (2.9).
(2.10)
Nous désignons par w le vecteur rotation instantanée du repère {Ri i} par rapport au
repère de base {R0}, donné d’après les formules de composition des vitesses, par :
/ 1 w 1 i k k k i k
Pour i =1…n, (2.11) Ce qui permet d’écrire :(2.12)
Avec: j 0
P
V : La vitesse relative du point P par rapport au repère {R j} est nulle
(Cj corps rigide). En mettant :
-1 i-1 i i-1 i
1 Vj wi P P i j i
: Vitesse absolue du point Oj l’origine de repère {R j}.
0 0 1 0 0 i 1P
V
i-j i j id
O P
d
d
O P
P
dt
dt
dt
0 0 -1 -1 -1 i i 1 w P P w VV
i i j i j j i j i d O P O P P dtP
Ce qui donne :
0 0 j V V wj j d O P O P P dt (2.13)Les deux vecteurs w et i V peuvent être calculés par récurrence, en appliquant les i formules de composition des vitesses.
(2.14)
(2.15)
Ce qui permet d’établir l’algorithme de calcul de la vitesse absolue d’un point P du corps Cj, suivant : Algorithme : Pour i = 1...j i i i i i w q z w 1 i i i i i i- w P q z V V i i 1 1 1 : Variable booléenne 1
On initialise la récurrence par :
0
w = 0 et V = 0 ( la base du bras manipulateur fixe ) 0
P O PVwj j V j Fin 1 / 1 wiwi i i i-1 i-1 i 1 -1 i i V V w P i- i P
c) Accélération du point P dans le repère de base {R0}
Le vecteur accélération du point P appartenant au corps Cj s’obtient par dérivation de
son vecteur vitesse VP donné par l’expression (2.12).
0 0 0 i-1 i-1 -1 i i 1 V V wi P P wj j i j i d d d P O P P dt dt dt
(2.16)Les dérivées de chacun des termes sont calculées séparément :
0 i-1 0 i-1 1 i i-1 i 1 i 1 w P P w P w i i i d d dt dt Avec : 1 1 / 1 / 1 1 w w 1 i k k k k k k i k
(2.17) k k k k k/ q z 1 : L’accélération angulaire relative du {Rk}/{Rk-1}, déduit de l’expression
de k /k1 par dérivation par rapport au temps.
0 i-1 i i-1 i-1 1 i i P wi P P d dt Avec i-1Pi : La vitesse relative du point Oi par rapport au repère {Ri-1.
d’où :
i -i i -i i -i i -i P w P w w P w P w 1 1 1 1 1 1 1 1 1 0 i i i i i dt d
i i i i i i i dt d P P w P 1 1 1 1 0 Avec i i P 1 : L’accélération relative du point Oi par rapport au repère {Ri-1} se déduit par
dérivation scalaire de i1Pi donnée par l’expression:
1 1 1 P P i i i i i i i i d q dt
( ) z (2.18)
w
w O P w
w OP
dt P O d j j j j j j j 0Après regroupement des différents termes calculés, l’expression (2.16) devient :
O P
O P
j j j j j i-j i i P w P w w P w P P w w w V i -i i -i i -i i -i
1 1 1 1 1 1 1 1 1 2 (2.19)Lorsque le point P est confondu avec Oj, on trouve par la relation (2.19) l’accélération du
point Oj l’origine du repère {R j}:
w P w w P w P P
V
i- i i- i i- i i- i j i i i- i- i- i-j 1 1 1 1 1 1 1 1 1 2 (2.20)Des deux expressions (2.19) et (2.20), on tire l’expression de l’accélération du point P en fonction de l’accélération du point Oj l’origine du repère {Rj } :
OP
P Vj wj OjP wj wj j
V (2.21)
De l’expression (2.19), on tire la formulation récurrente de l’accélération absolue du point Oi l’origine du repère {Ri} :
i -i i -i i -i i -i P P w P w w P w V Vi i1 i-1 1 i-1 i-1 1 2 i-1 1 1 (2.22) De l’expression (2.22), on tire la formulation récurrente de l’accélération angulaire durepère {Rj} par rapport au repère {R0} :
i i i i i
i i i i i i i i i i q q z z w w w w w w
1 1 1 / 1 / 1 1 (2.23)Ce qui permet d’établir l’algorithme de calcul de l’accélération absolue d’un point P du corps Cj, suivant :
Algorithme : Pour i = 1..j i i i i i w q z w
1 d’oùi 1 , : variable booléenne i
i i i i i i i i w w q z q z w
1 1 V V w P w
w P
w
i -i i -i i i i i i-i i-i i q z qz 1 1 1 1 1 1 1 2On initialise la récurrence par :
0 0 w , 0 0 w et 0 0
V ( la base du bras manipulateur fixe )
O P
P O P Vj wj j wj wj j V finII.2.2.3 Les efforts d’inertie dun corps dans un SMA
Le corps Cj du bras manipulateur est animé d’un mouvement rigidifiant dans l’espace
physique à trois dimensions.
Chaque masse élémentaire dm dv attachée au point P du corps Cj Figure II.3
soumise à des charges d’inerties représentées par les vecteurs opposés du torseur des quantités d’accélération calculée au point Gj le centre de gravité du corps Cj.
Figure II.3 : La masse élémentaire dm du corps Cj
P Oj Oj+1 dm Cj-1 Cj Cj+1
Le torseur de ces charges d’inerties est donné par :
dF V ( ) / dN V j j j j dv P dm G G P dv P
En intégrant ces deux expressions sur le volume du corps Cj concerné, on détermine la
résultante Fj et le moment Nj des actions dynamiques dues au seul corps Cj. réduits à son
centre de masse Gj. a) La résultante Fj Fj V j dm P P C
Avec :
V Vj wj O Pj wj wj O Pj P
F V w w w V w w w j j j j j j j j j j j j j j j j j dm O P dm O P dm P C P C P C M G P G P
Fj j V j M G (2.24) j GV : Accélération du centre de gravité du corps Cj
b) Le moment Nj
Nj j V j G P dm P P C
Avec :
V Vj wj O Pj wj wj O Pj P
j j j j j j j j j j C P C P C P dm P O P G dm P O P G dm P G V w w w N j j jEn intégrant cette expression terme à terme, on trouve :
1
0 j j j j j j C P C P dm P G dm P G I V V (2.25) Car
0 j j C P dm PG ( Gj est le centre de masse du corps Cj ).
j j j j j j j j j j j j j j j j j j j j j j C P C P C P C P C P dm P G P G G O dm P G dm P G P G dm G O P G dm P O P G I w w w w w
2Le vecteur
GjP
wjGjP
peut se mettre sous forme matricielle en utilisant les matrices pré–produit vectorielles.
w j
wj
wj G P G P G P G P G P P Gj j j j j j Ce qui donne :
2 j j wj II wj j j I G P G P dm G P C
(2.26) 0Avec :
P G GjP GjP dm j I I~ j G II~ : Le tenseur d’inertie du corps Cj, par rapport au repère (Gj,xj, yj,zj).
0 0 0 x y x z y z P Gj ;
0 0 0 x y x z y z P Gj
P G dm y x z y z x z y z x y x z x y x z y j I I 2 2 2 2 2 2 ~En intégrant cette expression matricielle, on trouve :
zz yz xz yz yy xy xz xy xx j I I I I I I I I I G I I~ (2.27)
Où Ixx, Ixy, Ixz, Iyy, Iyz et Izz : Les moments quadratiques d’inertie du Cj, par apport au repère
(Gj,xj, yj,zj).
w
w
w w w w j j j j j j 0 Car 3
j j j j j j j j j j G O dm P G dm P G P G dm P O P G I C P C P C P
GjP wj(wjGjP)
GjP (wjGjP)wj (wjwj )GjP
wj wj
GjP ( GjgP) Car :
GjP (wj wj )GjP
0De la même façon wj
(GjPGjP)wj
0 Ce qui permet d’écrire :
w
w w w w w w j j j j j j j ) ( ) ( ) ( ) ( gP G P G P G P G P G P G P G P G j j j j j j j j d’où :
j j j j w w w w G P G P dm G P G P dm I j j j j j j C P C P ) ( 3 w II wj j j G I3 ~ (2.28)Les expressions (2.23), (2.24) et (2.26) permettent d’écrire :
(2.29)
II.2.2.4 Expressions mises en œuvre d’un calcul automatique
Ce formalisme est basé sur une double récurrence : La récurrence avant de la base du robot vers l’effecteur et la récurrence arrière, de l’effecteur vers la base.
Pour les chaînes arborescentes :
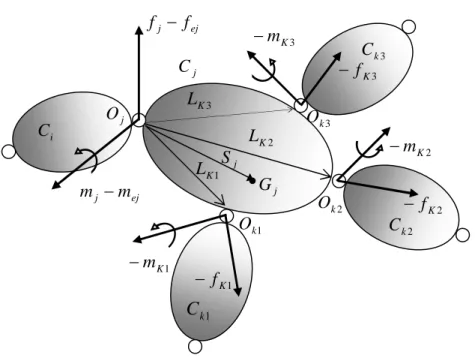
Une chaîne complexe Figure II.4 est une chaîne cinématique constituée de plusieurs chaînes fermées imbriquées [13],[17].
Nj II wj wj II wj j j G G
Figure II.4 : Bilan des efforts sur une structure arborescent
Les équations de la récurrence avant, s’écrivent pour j =1…n : Les formules de composition des vitesses et des accélérations :
j w =wj1 jqjzj j w =wj1 j
qjzjqjwj1zj
j V =Vj1+wj1 j-1Pj+wj1(wj1 j-1Pj) +j
qj zj2qj wj1zj
j G V =Vj+w j Sj+w j (w j Sj)Le torseur dynamique du corps Cj :
j G j j M V F ) ~ ( ~ j j j j IIG w w IIG w N j j
On initialise la récurrence par :
w = 0 0 , w0= 0 et V0 = -g (La base du bras manipulateur fixe)
ej j f f ej j m m 1 K m 1 K f 1 k C j O 2 k C 3 k C i C 1 k O 2 k O 3 k O 3 K m 2 K m 2 K L 3 K L 1 K L j G j S 2 K f 3 K f j C
Les équations de la récurrence arrière pour j = n..1: 1 j j j f F f 1 1 1 j j j j j j j j m N m P f S F
Récurrence initialisée par les efforts fn1et mn1, noté respectivement Fext et Mext qu’exerce l’organe terminal sur l’environnement.
On remarque que l’ont peut toujours faire le calcul pour j variant de 1 à n.
Sachant qu’un corps peut avoir plusieurs successeurs Figure II.4 et en note k l’indice des repères tels que a(k)=j, les équations de récurrence arrière s’écrivent pour j=n..1 :
/ j j j j ej k k a k j f F f f
j i j j j j f A f
/ j j j j k j j j j ej k k k k k a k j m N m A m p f
On obtient les couples des actionneurs j en projetant, selon le nature de la liaison Aj, on ajoute les résistances complémentaires issue des actionneurs eux-mêmes (frottements et inerties des actionneurs).
* *
* j*sgn
j* * T j j j j fj j mj zj Fs qj FV qj Ia qj j (2.30) Avec : j sF : Paramètres de frottement sec de l’articulation j
j
V
F : Paramètres de frottement visqueux de l’articulation j Quand le corps Cj est un corps terminal, les termes
j k
m et jfk deviennent nuls [11].
II.2.3 Principe des travaux virtuels de d’Alembert
Ce principe permet d’étudier le comportement dynamique des systèmes articulés en forme d’arbre topologique, dont les articulations possèdent un degré de liberté (translation ou rotation).