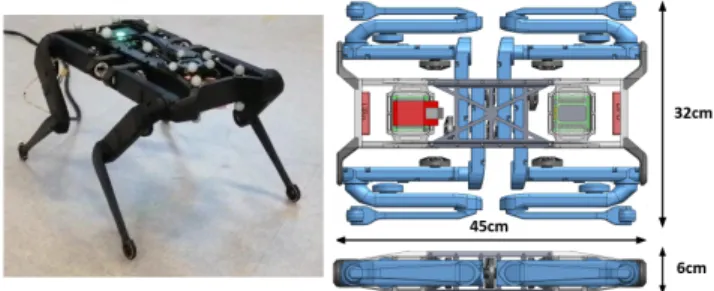
Implementation of a Reactive Walking Controller for the New Open-Hardware Quadruped Solo-12
Texte intégral
Figure

Documents relatifs
as in two Commission soft law instruments: Commission Recommendation of 11 February 2003 on relevant product and service markets within the electronic communications sector
The tidal forcings, as well as the tidal elevations and currents resulting from the 3D simulations, are compared to tidal harmonics extracted from satellite altimetry and tidal
(a) the possibility of dealing with any arbitrary initial anisotropic behavior; (b) an efficient numerical implementation due to very simple closed forms of projection operators and
A Generalized Quantum Dimer Model Applied to the Frustrated Heisenberg Model on the Square Lattice: Emergence of a Mixed Columnar-Plaquette Phase... Generalized quantum dimer
Infrared flow magnitude, with parameter model uncertainties, with: (solid) Optimization by MPC of the dynamic of the output temperature, with output constraint, constrained target
Laurent, On nonlinear distributed parameter model predictive control strategy: On-line calculation time reduction and application to an experimental drying process, Computers
Another original feature of the software is the straightforward resolution of various model based optimal control problems through few tuning parameters: trajectory
This indicates that the model we have developed on the basis of the linearized equations of gen- eral relativity is able to explain the reason for which the rotation curve of
