NUCLEAR
ENGINEERING
MITNE--181
READiNG
ROOM -
M.-CHD: A TWO-DIMENSIONAL, MULTIGROUP,
RECTANGULAR GEOMETRY, CUBIC HERMITE,
FINITE ELEMENT DIFFUSION CODE
by
F. A. Kautz
L.
0. Deppe
June 1975
DEPARTMENT OF NUCLEAR ENGINEERING
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
Cambridge, Massachusetts 02139
AEC Research and Development Report
Contract AT(1 1-1)-2262
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
DEPARTMENT OF NUCLEAR ENGINEERING Cambridge, Massachusetts 02139
CHD: A Two-dimensional, Multigroup,
Rectangular Geometry, Cubic Hermite, Finite Element Diffusion Code
by F. A. Kautz L. 0. Deppe June 1975 COO--2262-10 MITNE--181
AEC Research and Development Report
Contract (11-1)2262
CONTENTS
Abstract
I. Introduction II. Theory
A. The Time-Independent Neutron Diffusion
Equation
B. Finite Element Methods and the Weak Formulation
C. The Weak Form of the Diffusion Equations D. Multigroup Diffusion Equations
1. Generalized Multigroup Equations
2. Conventional Multigroup Equations
E. Spatial Approximations
1. Construction of Basis Functions for
Piecewise Expansion in One Dimension 2. Construction of Basis Functions in
Two Dimensions
3. Varying Cross Sections within the
Expansion Element
4. Matrix Formulation of the Multigroup Diffusion Equations
F. Solution Algorithms
1. Boundary Conditions
a. Vacuum Boundary Condition
b. Zero Derviative Boundary Condition
2. Iterative Processes 1 4 6 6 10 13 16 16 17 19 20 32 45 47 54 54 54 55 55
3. Convergence Acceleration of the Outer
Iteration 57
4. Convergence Tests 59
III. Sample Problems and Results 60
A. The One-dimensional, Ten-region Problem 60
B. The Basic Two-dimensional, Two-composition
Problem 67
C. The Basic Two-dimensional Problem with a Baffle
Surrounding the Fuel Region 72
D. The Basic Two-dimensional Problem with Varying
Cross Sections within the Fuel Region 79
E. Results of IAEA 2-D Benchmark with Various
Coarse Meshes 88
F. Results for Maine Yankee in Two Dimensions
with Various Coarse Meshes 96
G. Results for Zion 1 in Two Dimensions with
Various Coarse Meshes 105
IV. A Guide to User Applications 113
A. Overall Program Flow 113
B. Details of Program Options 113
1. Cross Section 113
a. Input Formats 113
b. Cross Section Collapsing 116
2. Finite Element Expansion Function
Specification 117
3. Geometry and Boundary Condition
a. Spatial Mesh
b. Boundary Conditions
c. Specifications of Elements with either
Varying Cross Section or Constant Cross Section Subregions
4. Flux Input Options
5. Flux Dumps and Restart Procedures 6. Convergence Criterion Specifications 7. Edit Options
a. Element Edit
b. Zone Edit c. Point Edit
C. Description of Input Data 1. Job Title Card
2. Input of Control Numbers
3. Problem Dependent Data
4. Edit Input
V. Programming Information
A. Program Structure 1. Program Flow
2. Role and Function of Subprograms
3. Relation of Problem Variables and Program
Mnemonics
4. Definition of Important Variables in Common Blocks and Argument Lists B. Hardware Requirements C. Software Requirements D. Programming Considerations 120 122 123 125 125 127 128 128 128 130 131 131 131 135 140 143 143 143 143 143 149 149 149 154
1. Variable Dimensioning 154
2. Ordering of Unknowns 154
FIGURES
Figure 1. A Function f(x) and a Uniquely Determined
Interpolate si(x) in the Interval
(xi, xi+1).
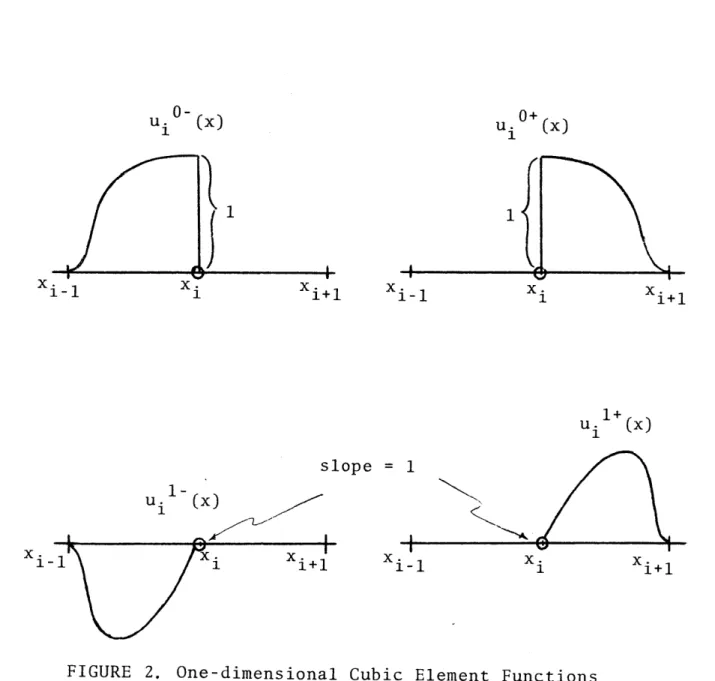
Figure 2. One-dimensional Cubic Element Functions
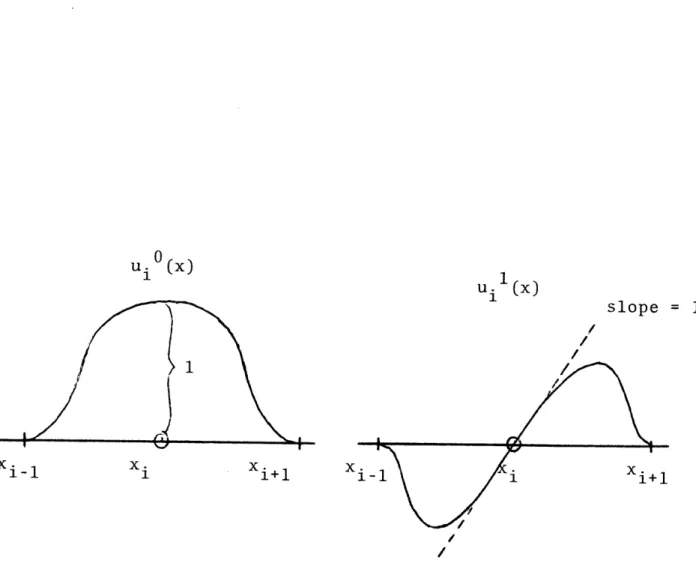
Figure 3. Cubic Basis Functions Appropriate for
Functions and Derivative Continuity
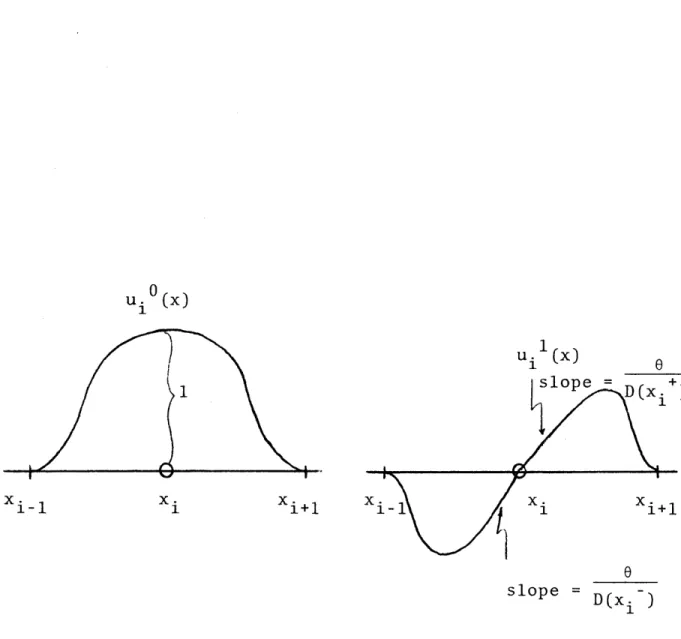
Figure 4. Cubic Basis Functions Appropriate for Flux
and Current Continuity Across Interface
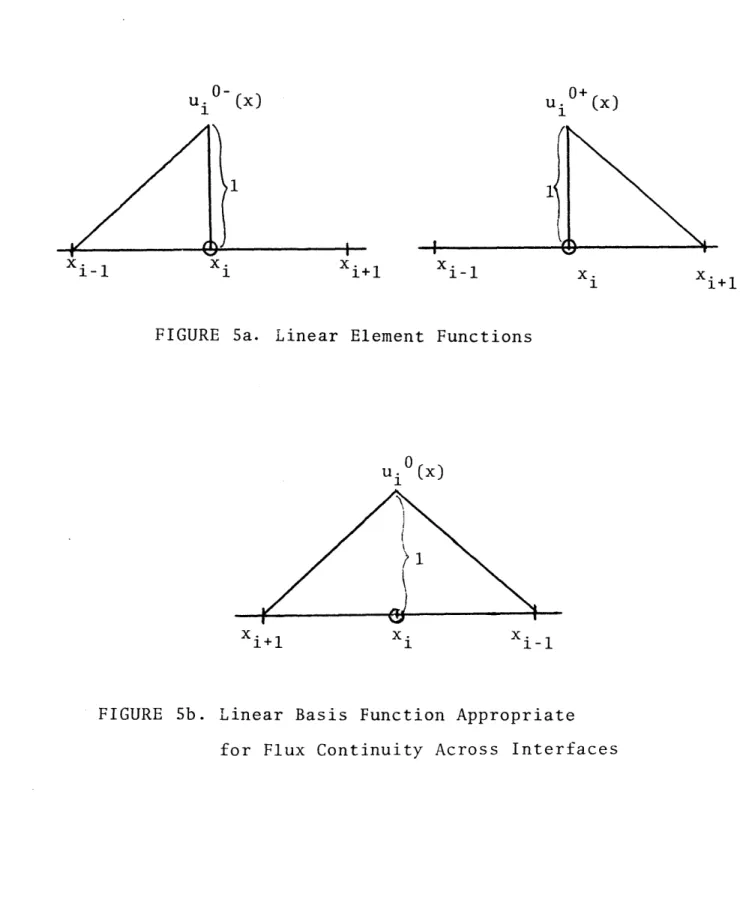
Figure 5a. Linear Element Functions
Figure Sb. Linear Basis Functions Appropriate for
Flux Continuity Across Interface
Figure 6. Hermite Interpolation Data in a Rectangular
Mesh
Figure 7. Bicubic Basis Functions
Figure 8. Basis Functions on Boundary Points of a
Rectangular Mesh
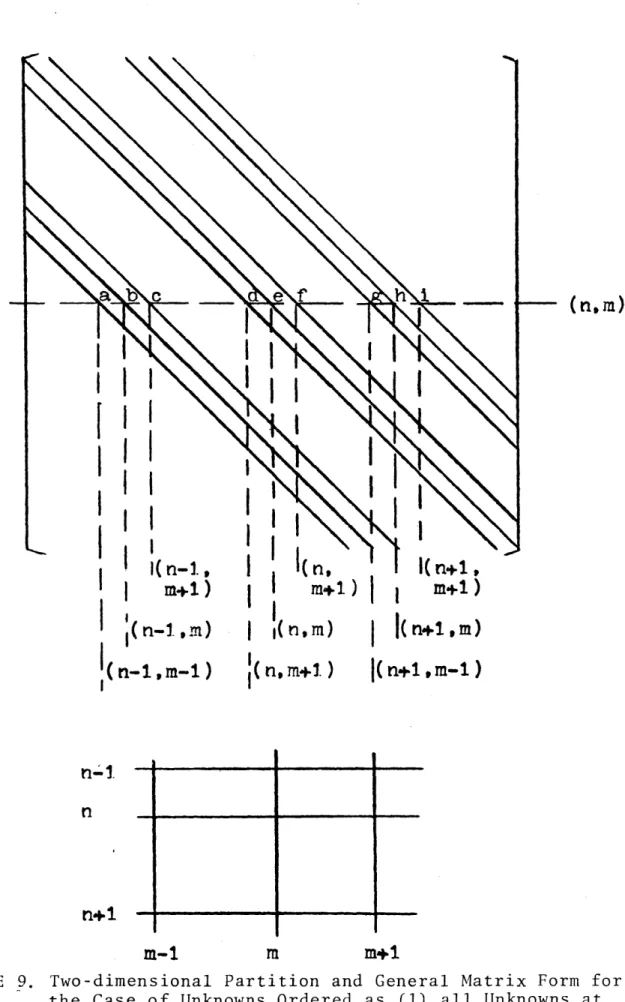
Figure 9. 'Two-dimensional Partition and General Matrix
Form for the Case of Unknowns Ordered as
(1) All Unknowns at Each Point, (2) All Mesh
Columns, and (3) All Mesh Rows
Figure 10. Two-dimensional Partition and Corresponding
Submatrix (e.g., Lg) Structure
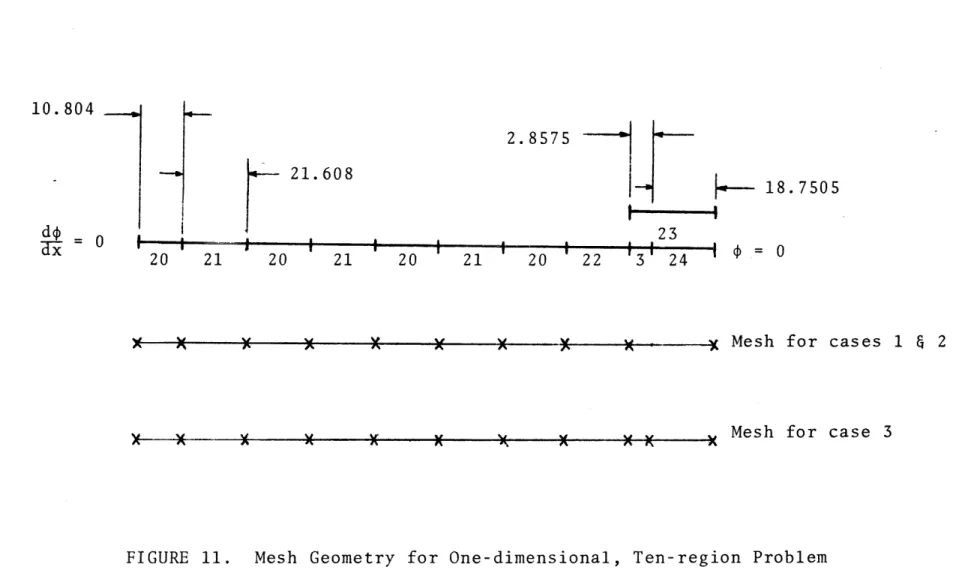
Figure 11. Mesh Geometry for One-dimensional,
Ten-region Problem 22 25 27 29 30 31 34 42 44 51 52 62
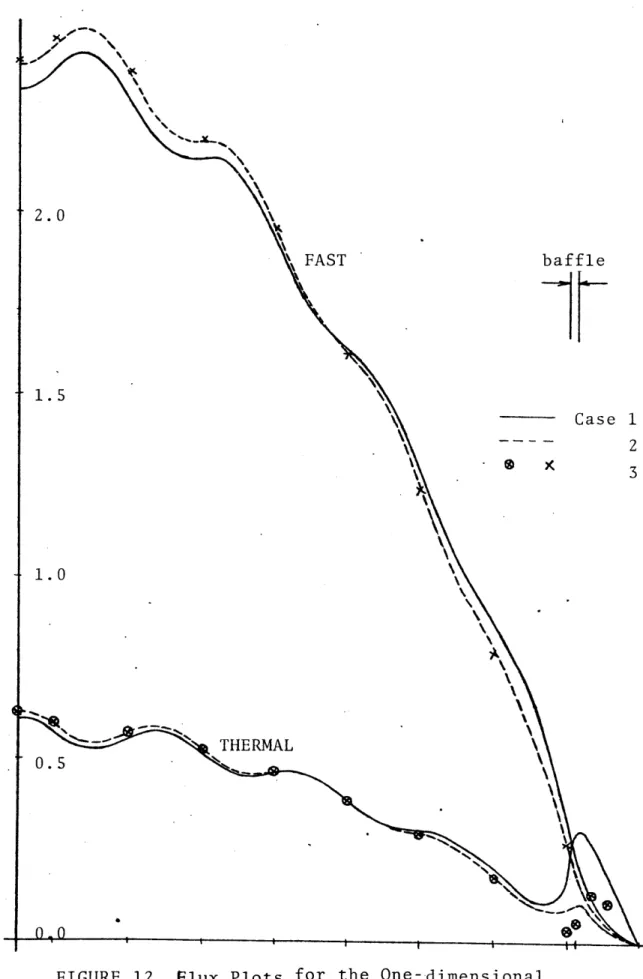
Figure 12. Figure 13. Figure 14a. Figure 14b. Figure 15. Figure 16a. Figure 16b. Figure 17. Figure 18a Figure 18b.
Flux Plots for the One-dimensional,
Ten-region Problem 65
The Basic Two-dimensions, Two-composition
Problem 68
Thermal Flux Plots for the Basic Two-Dimensional, Two-composition Problem at
x = 0.0 70
Thermal Flux Plots for the Basic Two-dimensional, Two-composition Problem at
x = 20.0 cm 71
Geometry for the Basic Two-dimensional Problem with Baffle Surrounding the Fuel
Region 73
Thermal Fluxes at y = 0.0 for the Basic
Two-dimensional Problem with a Baffle
Surround-ing the Fuel Region 76
Thermal Fluxes at y = 20.0 for the Basic
Two-dimensional Problem with a Baffle
Surround-ing the Fuel Region 77
Geometry for the Basic Two-dimensional Problem with Varying Cross Sections within
the Fuel Region 80
Thermal Fluxes at x = 0.0 for the Basic
Two-dimensional Problem with Varying Cross Sections
within the Fuel Region 83
Fast Fluxes at x = 0.0 for the Basic
Two-dimensional Problem with Varying Cross
Figure 19a. Thermal Fluxes at x = 20.0 cm for the
Basic Two-dimensional Problem with Varying
Cross Sections within the Fuel Region 85
Figure 19b. Fast Fluxes at x = 20.0 cm for the basic
Two-Dimensional Problem with Varying Cross Sections
within the Fuel Region 86
Figure 20. Core Layout for IAEA Benchmark 89
Figure 21. CHD 8 x 8 Mesh for IAEA Benchmarks 90
Figure 22. CHD 7 x 7 Mesh for IAEA Benchmark 91
Figure 23. Assembly Power Fraction Comparison for IAEA
Benchmark 92
Figure 24. Percent Error in Assembly Powers for IAEA
Benchmark 93
Figure 25. Comparison of Percent Error in Assembly
Powers with Cubic Hermite and Linear
Hermite Elements for IAEA Benchmark 95
Figure 26. Core Layout of Maine Yankee 97
Figure 27. CHD 11 x 11 Mesh for Maine Yankee 98
Figure 28. CHD 8 x 8 Mesh for Maine Yankee 99
Figure 29. CHD 7 x 7 Mesh for Maine Yankee 100
Figure 30. Assembly Power Fraction Comparison for
Maine Yankee 101
Figure 31. Percent Error in Assembly Power for Maine
Yankee 103
Figure 32. Core Layout for Zion 1 106
Figure 33. CHD 7 x 7 Mesh for Zion 1 107
Figure 35.
Figure 36.
Figure 37.
Figure 38.
Figure 39.
Assembly Power Fraction Comparison for Zion 1
Assembly-averaged-to-core-averaged Power Ratios for Zion 1
Simplified Logical Flow Diagram for CHD Coordinate System Orientation Assumed
by CHD
Program Subroutine Flow Chart for CHD
109
110
114
121
TABLES
Table I. Eigenvalues for the One-dimensional
Ten-region Problem 63
Table II. Element-averaged Results for the
One-dimensional, Ten-region Problem 64
Table III. Eigenvalues for the Basic
Two-Dimensional, Two-composition Problem 69
Table IV. Results for the Basic Two-Dimensional
Problem with a Baffle Surrounding the
Fuel Region 75
Table V. Some Results for the Basic
Two-Dimensional Problem with Varying Cross
Sections within the Fuel Region 82
Table VI. Data for IAEA 2-D Benchmark Analysis 94
Table VII. Data for Maine Yankee Analysis 104
Table VIII. Data for Zion 1 Analysis 112
Table IX. Description of Expansion Function Options 118
Table X. Default Expansion Function Sets 119
Table XI. Function of CHD Subroutines 145
Table XII. Relation of Some Problem Variables to
Program Mnemonics 148
Table XIII. Definitions of Some Important Program
Variables 150
REFERENCES
Appendix A: Macroscopic Cross Sections for Test Problems 158
Appendix B: Inner Products for Cubic Hermite Element
Functions
Appendix C: Sample Problem Input and Output
161 166
CHD: A TWO-DIMENSIONAL, MULTIGROUP, RECTANGULAR GEOMETRY, CUBIC HERMITE,
FINITE ELEMENT DIFFUSION CODE
by F. A. Kautz L. 0. Deppe
ABSTRACT
1. Program Identification: CHD
2. Description of Function: CHD solves the two-dimensional
multigroup diffusion equation in planar geometries using a general rectangular mesh. Regular inhomogeneous (keff) problems subject to vacuum or reflective boundary con-ditions are solved.
3. Method of Solution: A finite element method in which the flux is assumed to be given by a cubic Hermite poly-nomial in each rectangle is used to solve the
accelerated by a Chebyshev Technique.
4. Restrictions: Variable dimensioning is used so that any
combination of problem parameters leading to a container array less than MSIZE can be accomodated. On IBM ma-chines, where CHD uses a combination of single precision
(4 bytes per word) and double precision (8 bytes per word), MSIZE can be several hundred thousand words (in terms of 4-byte words).
5. Computers for which Program is Designed and Others on
which it is Operational: IBM 370/168, IBM 360/91, IBM
360/195.
6. Running Time: A two-group, 81-element, kef calculation
for the two-dimensional, quarter core IAEA benchmark
problem requires about 2.3 minutes of IBM 370/168 time.
Running times vary almost linearly with the total number of unknowns.
7. Programming Language; CHD is written in FORTRAN-IV.
8. Unusual Features of the Program: Element regions can
encompass areas with varying cross sections, with these cross section variations accounted for through the inner products of the basis functions. Thus each element
region can include more than one core assembly, taking advantage of the high-order flux expansion. Flexible edit options, including dumps and restart capability, are provided.
9. Machine Requirements: The standard output (scratch)
units and system input/output units provided with IBM
360-370 machines are sufficient. A relatively large
10. Authors: The authors of CHD are F. A. Kautz and L. 0. Deppe, of the Department of Nuclear Engineering, Bldg.
24-212, Massachusetts Institute of Technology, 77
Massa-chusetts Avenue, Cambridge, MA 02139. The individual
currently responsible for the program is F. A. Kautz.
11. References: Publications which are directly related to
the methods incorporated in CHD are the following: (a) Kang, C. M., and K. F. Hansen, Finite Element Methods for Space-time Reactor Analysis, Sc.D.
thesis, Report MIT-3903-5, MITNE-135, Massachusetts Institute of Technology, Cambridge, MA 02139,
November 1971.
(b) Deppe, L. 0., and K. F. Hansen, The Finite
Ele-ment Method Applied to Neutron Diffusion Problems, Nucl.E. thesis, Report COO-2262-1, MITNE-145,
Massachusetts Institute of Technology, Cambridge, MA 02139, February 1973.
12. Material Available: Source deck, test problems, results
of executed test problems, and this report are avail-able from the Department of Nuclear Engineering,
I. INTRODUCTION
CHD is a program for solving the two-dimensional,
multigroup neutron diffusion equations using a rectangular mesh. The unknown solutions are expanded as bicubic Hermite polynomials in a piecewise manner using the Galerkin method
to arrive at a discrete formulation. The resulting
equa-tions are uncoupled via the power iteration technique, and the group solutions are obtained by direct inversion (using Cholesky factorization) of the coefficient matrix.
The code solves the standard eigenvalue (lamda mode) problems, providing flexible edit options which include
dumps and restart capability. Vacuum and reflection
boun-dary conditions are admissible, consistent with any problem type.
CHD is written in Fortran IV using flexible
dimension-ing so that the size of all arrays is established at the execution of a particular problem; hence, core storage requirements are minimized. Particular features of CHD include:
1. arbitrary group-to-group downscattering,
2. arbitrary group-to-group fission sources,
3. vacuum and reflective boundary conditions on all
sides,
4. rectangular domains,
5. elements which can encompass areas having varying
cross sections,
7. flexible input options for basis functions
specifications,
8. Chebyshev convergence acceleration for outer
iterations,
9. flexible restart and edit options, including
reaction rate edits over subregions within element regions.
The next section of this report contains the theo-retical development of all the methods and approximations used in CHD. Section III contains sample problems and re-sults, Section IV is a guide to user application, and Sec-tion V contains programming informaSec-tion.
II. THEORY
In this section the energy and spatial variables of the diffusion equation are discretized to obtain a set of
linear algebraic equations. The time-independent neutron
diffusion equation is written and discussed in Section II.A.
A general discussion of finite element methods and the weak
formulation of a problem is presented in Section II.B.
Section II.C is devoted entirely to a discussion of the weak
form of the diffusion equations. The multigroup form of the
diffusion equations is presented in Section II.D. The
details of spatial approximations used in CHD are given in Section II.E. The solution of the linear algebraic system obtained by these approximations is discussed in Section II.F.
A. The Time-independent Neutron Diffusion Equation
In this section we introduce the energy-dependent, time-independent neutron diffusion equation and discuss
proper boundary conditions. The derivation of this equation
can be found in Davison [1], Henry [2], and elsewhere [3], [4].
For reactor problems the mathematical model of the physical problem is usually defined so that the solution parameters are at least piecewise continuous across the
subregion interface of the model. Consider, therefore, a
boundary 3M. We assume that 2 consists of contiguous open
subregions Q., Z=1, 2, ... , L, each of which is bounded by
a . Symbolically,
L
Q_ U i Q
Furthermore, let-E < E < E represent the continuous
mi- max
energy variable, and define E H (Emin, E ).
Then, within any region Q , the continuous energy,
time-independent neutron diffusion equation can be written as
T D= - V -D(r, E) V_(r, E) + E t (r,E) D(r,E)
- f dEZ s(r,E'+E)#(r,E') - X(E)f dE'vEf(;E')4(rE'),
= Q(rE),
where
2
( (r,E) = scalar neutron flux (n/cm -sec),
D(r,E) = neutron diffusion coefficient (cm),
Et (r,E) = total macroscopic removal cross section
(cm~ ), E a(r,E) E (r,E'+E) Zf(r,E) V vEf(r. E) E
Et(r,E) E Za(r,E) + maEs(r,E+E')dE',
min
= macroscopic absorption cross section (cm ),
= macroscopic scattering cross section
from E' to E (cm ),
= macroscopic fission cross section (cm ),
= average number of neutrons produced per
fission
= macroscopic fission neutron production
X(E) = fission spectrum for prompt neutrons,
= l/keff, eigenvalue introduced to define
an eigenvalue problem,
k eff = system multiplication factor,
Q(r,E) = extraneous source.
D, E a' s and Ef are continuous in each Q., Z=1, 2, ..
L, and may be discontinuous on 3. If Q(r,E) = 0, then Eq.
(1) becomes an eigenvalue problem.
Eq. (1) is the result of a balance condition applied to
a volume element dr about r and to an energy interval dE about E. The first two terms on the left side of Eq. (1) account for the loses by net leakage and removal. The next two terms account for gains by inscattering from other
energies or by fissions at any energy,
We will impose any of the following homogeneous boun-dary conditions:
@(r,E) = 0
EE:
or for (2)
-5(r,E) =
0,
where 3/3n is the outward normal derivative at M.
The diffusion approximation fails in the neighborhood of material interfaces, where the solution has transients. We assume that the solution satisfies certain boundary
conditions at the interfaces. Rigorous interface boundary
transport theory are discussed in Davidson [1]. However, the following set of interface boundary conditions is more commonly used:
(r,E) = $(r+,E),
Ec
for
rs3Q
D(r~,E) $(r ,E) = D(r ,E)y-(r E). (3)
The negative and positive superscripts refer to opposite sides
of material interfaces. These conditions are the flux and
B. Finite Element Methods and the Weak Formulation
The finite element method consists basically of finding approximate solutions to Eq. (1) which are defined only over subregions (or finite elements) of the problem domain. When joined together, these piecewise solutions form an
approx-imate solution over the whole problem domain.
To generate these approximate solutions to Eq. (1) we
shall expand $ in terms of some suitable basis functions.
However, if we require the basis functions to have the same
differentiability properties and continuity properties as $
itself, then we will have great difficulties finding the
basis functions. In order to avoid these difficulties, we
consider another formulation of the problem which weakens the continuity conditions and permits the use of a much broader class of expansion functions. We will now proceed to illustrate this "weak" formulation of a problem.
Consider the problem defined by
-V24(r)
= L$(r) = Q(r), r in Q, (4a)where L is a linear operator with homogeneous boundary conditions
$(r) = 0
or for re 30
-$(r) = 0 (4b)
and continuity conditions
for re3O
Q(r) represents a source term.
This boundary-value problem can be cast in a varia-tional form. Given the funcvaria-tional
J = (L$,$) -2 (Q,$),
the condition under which J is stationary is given by
(Lp,u) - (Qu) = 0,
for all u in the same function space as
p.
The term (Q,u),for instance, denotes an inner product defined by
(Qu) =f2Qudv.
Integtating Eq. (6) by parts yields
(Vq,Vu) -f ( $. )udS - (Q,u) = 0.
DZ
(5)
(6)
(7)
Since homogeneous boundary conditions and derivative continuity conditions have been imposed, we see that the surface integral vanishes and we are left with
(V$,Vu) - (Qu) = 0. (8)
Eq. (8) is called the weak form of Eq. (6), and any $(r)
which satisfies Eq. (8) is called a weak solution to the
problem defined by Eqs. (4a, b, c). We observe that any $(r)
which is a solution of Eqs. (4a, b, c) is also a solution of
Eq. (8), and conversely, if the weak solution is in the
domain of the operator L, that is, twice differentiable in each R., then it also satisfies Eqs. (4a, c).
In order to approximate the solution to Eqs. (4a, b, c), we choose a convenient trial function space where the
piecewise functions {ui(r)}If 1 form a basis. In particular,
we choose u (r) as polynomials of a certain degree satis-fying the same boundary conditions as the analytic solution.
We then seek an approximate solution of the form
M
() = . au (r) (9)
i=l 1
In the well-known Galerkin method [5], [6] of solving integro-differential equations, the expansion coefficients a are determined from the condition that the equation
obtained by the substitution of $(r) for $ in Eq. (4) must
be orthogonal to the elements u1 , u2, ... , uM. This
con-dition leads to the system of equations
(L$,u.) = (Q,u.), (10)
for all i = 1, 2, ... , M.
There are severe limitations to this particular
formu-lation. The expansion functions are required to be twice
differentiable, and the interface continuity conditions are
imposed on the approximate solution. In view of the less
restrictive conditions on $ in the weak form of the problem,
we should expect that the class of appropriate expansion (or
basis) functions is much larger. $ is only required to be
piecewise continuous and may not satisfy the derivative continuity condition which appears as a natural interface
condition. These allow piecewise linear functions to be an
acceptable expansion functions in the weak form. Thus, in order to increase our degree of freedom in choosing expan-sion functions, we seek approximate solutions to the weak formulation of the problem, Eq. (8).
The Galerkin method then requires
(V$,Vu ) = (Q,u ) (11)
C. The Weak Form of the Diffusion Equations
Using the inner product for the space energy problem,
($,u)
f
dE fdV~u,we define the form (T$,u) as
(T$,u) - (VDV$,u) + (E t ,u)
-
(fdE'Es
(E'+E)$(E'),u)1
- (X(E) fdE'vE f(E')$(E'),u).
In order for the terms of (T$,u) to exist, we must require
that $ and u be continuous and that $ have second
deriva-tives which are square intergrable.
The original (i.e., "rigorous") formulation of the diffusion problem may be stated as a problem of finding
$ in the domain of the operator T satisfying
(T$,u) = (Q,u). (12)
Intetrating the leakage term by parts, we obtain
XfdV(V-DV$,u) = (DV,Vu)
faJdS(Da ,u) , (13)
where the last term on the right is the sum of the surface
integrals for each subregion P of 0. Since $ satisfies
Eqs. (4b, c), the summation vanishes. Thus, Eq. (12) leads
to the weak form
where a($,u) is a bilinear form defined by
a($,u) = (DV$,Vu) + (Et$,u)
- dE'Es(E'+ -E)$ (E')u)
-
(X(E)f
dEIvE (E')$(E'),u).Observe that in order for the terms of a($,u) to exist, we
require that $ and u be continuous and have first derivatives
which are square integrable. We define W1 (Q) (generally
called a Sobolev space) as the set of all functions which
satisfy the above conditions. In view of the boundary
conditions in Eq. (4c), we shall use a subspace of W
(sM,
denoted by W (Q), whose elements satisfy the boundary
con-ditions stated by Eq. (4b).
The weak formulation of the diffusion problem may be
stated, therefore, as a problem of finding $ in W1 (Q)
satisfying Eq. (14), for all u in the function space W 0 (Q).
Any $(r,E) which satisfies Eq. (14) is called a weak solu-tion to the diffusion problem.
It has been demonstrated by the steps leading from Eq. (12) to Eq. (14) that any $(r,E) which is a solution of Eqs.
(4a, b, c) is also a solution of Eq. (14). It can be shown
[7], conversely, that if the weak solution is twice
dif-ferentiable in each Q (i.e., in the domain of the operator
T), then it also satisfies Eqs. (4a,c). In particular, it
can be shown that the continuity conditions for D $
(cur-rent) in Eqs. (4a, c) are Euler equations in the varia-tion of u in the weak formulavaria-tion. For this reason, the
current continuity condition is called the "natural interface condition."
In the weak form of the diffusion equation, $ is only
required to be an element of the function space W1(2) and need not satisfy the current continuity condition which appears as
a natural interface condition. This allows the piecewise
linear function to be an acceptable function in the weak form. In fact, the weak form is very well suited for the use of piecewise polynomials as basis functions.
D. Multigroup Diffusion Equations
In Sections D and E, we briefly develop approximate methods for the solution of the weak form of the neutron
diffusion equations, Eq. (14). In this section, we consider
approximations of Eqs. (4a, b, c) in energy. The general-ized multigroup equations will be developed first, because of their relationship to formal few group theory [2], and then the conventional multigroup equations will be extracted from these generalized equations as a special case.
1. Generalized Multigroup Equations
We consider expansions of the flux in terms of piece-wise polynomials in both space and energy. The approximate
solution $(r,E) can be represented as
G M
$(r ,E) = ' X a. u.(r)u (E), (15)
g=1 i=l
where u (r) and u (E) are spatially dependent and energy dependent basis functions, respectively. The construction of these basis functions is discussed in Section E, and [7] presents further details.
We define the group flux approximation $ (r) as
M
9g = . =1ig 1 -la. u.(r). (16)
Eq. (15) can then be written as
G
$(r,E) = I $ (r)u (E). (17)
-We apply the Galerkin scheme to Eqs. (4a, b, c), such that qsatisfies, for g=l, 2, ... , G,
(T$u) =(Q,u ) , (18
($| ,u ) 0, (18
($,u ) and (DV$,u ) continuous on the material interfaces. (18c)
where (ou)jf DudE. Eqs. (18a, b, c) lead to the generalized multigroup
equations which are given by, for g=l, 2, ... , G,
G
- = V-D ,7 ,(r) =
with boundary conditions
g (r)| G X tgg' sg~ Vfg'9rg' Q g(r), g'1=1 tgg, sgg'X gg9 = 0, (19a) (19b) (19c) G
I(r), D ,(r) continuous at material interfaces
g g'=1
gg13g-where
D '9 (r) = (Du 9, (E),u 9(E)) ,
tgg 'E t(u , 1(E) u g(E))
sgg, ()= (fdE'Es (E'+E)u , (E'), u (E))
X = (X(E), ug (E)) ,
(fg = f dE'Ef(E'), u , (E')
Q (r) = (Q(rE), u (E))
g 9
2. Conventional Multigroup Equations
The conventional multigroup equations [1], [3], [4] are
obtained as a special case of Eqs. (19a, b, c). In this
a)
case, we specify
S(E), Eg>E>Eg+l
u (E) =
0, otherwise
where S(E) represents an infinite medium neutron spectrum. We then obtain the conventional multigroup equation, for g=1,
2,
.. G,G
X
-V-D VgY (r) + E t ) (r) - {z ,D + -v, =
Q
,(20a)- g- g tg g - sgg g' x fg' g g
with boundary conditions
(r)| = 0, (20b)
g
-
3
0(r) and D -4) (r) continuous at material interfaces, (20c)
where
D = 6 ,D g,
g gg g ,
tg ~gg'Z t
E. Spatial Approximations
The central problem in the application of the finite element method is finding appropriate piecewise continuous functions in an appropriate trial space (e.g., Hermite space or spline space) for use as trial functions in the approx-imate solutions to the convential multigroup equations,
M
= a. u.(r). (16)
g ig=' 1
-Polynomials are a natural choice for the basis functions
ui(r). They are easily integrated and differentiated, they
are well known, and they can be made complete. Other trial functions, such as trigonometric functions, can also be used.
Among the possible polynomial spaces, those based upon Lagrange and Hermite polynomials have been most widely
applied to diffusion problems. Lagrange polynomials are generated by using the function values at interval points of
the subregions. Hermite polynomials, on the other hand, are
generated through the use of values of the function and its
derivatives at the boundary of the subregions. In
partic-ular, the same data must be available at both ends of the interpolation interval. This means, for instance, that if one has the value of the function and its first order
deriv-atives at one end (or corner) of the interval, one must also have the value of the function and its first order
deriva-tives at the other end (or corners). Thus, the amount of
data is always an even number of values; hence the poly-nomials are always of odd degree. For neutron diffusion
problems, a desirable feature of Hermite polynomials is the fact that they allow the natural imposition of flux and current continuity conditions.
In the next two subsections of section E, we will sum-marize the construction of a complete basis for the piece-wise expansion of the solution to the weak form of the multigroup neutron diffusion equations, in one and two
dimensions, and in terms of the Hermite polynomials of the first and third degrees. The third subsection deals with varying cross sections inside the expansion elements, and the fourth subsection discusses the application of the
Galerkin technique to the weak form of the multigroup equa-tions and the matrix formulation of the problem.
1. Construction of Basis Functions for Piecewise Expansion
in One Dimension
We will now examine construction of the cubic Hermite basis functions appropriate for the expansion of the unknown solution in a one-dimensional space and indicate afterwards
the use of linear basis functions. In the next section, we
will consider the extension to two dimensions.
Consider a one-dimensional closed interval Q=[a,b] with a partition A of 0 such that
A:a=x <x2 ''''M = b, (21)
where A = (xi, xi+), i=1, 2, ... , M-1 are open subintervals
sufficiently smooth function f(x) in [xi, x i+], illustrated
in Fig. 1. When the values of both the function and its
first derivative at x and x i+1 are known, we consider the
use of polynomials si(x), of degree 2m-1 (where m=2 for the cubic interpolate) such that si(x) satisfies
S (P) (x.) = f (P (x.)
s i(p)
(xi+13 = ~ (i+1), O<p<m-1,(22a)
(22b)
where s. 1 (x.) (x.)11 = -s.(x).
x
This type of interpolation
is called Hermite interpolation and it is known [8] that Hermite interpolate si(x) can be uniquely determined.
The Hermite interpolate si(x) of f(x) can be expressed a general way by
s (x) = m1 f(P)(x +)uP+(x) + f(P)(xi+l)up+1 (xI,
p=0
where the functions {uP±}, for m>1, are known as element
1
functions (i.e., piecewise polynomial functions) and are defined by 2m-1 1 x, I a x ,x _- <x x , up(x) = 1 J+
(x)
= 1 0V the in (23) (24a) otherwise, 2m-1 +'y 1' a x x x1- i+1, y0 0, otherwise, (24b)S. (x)
function and
derivative
values known -derivative
values known
f(x)
a x 1 xi+ 1 b
xD
FIGURE 1. A Function f(x) and a Uniquely Determined Cubic Interpolate S. (x) in the Interval [xi, x=l]
such that
uP xi)= 6. .6
0<pm-g1 j ij pg <p<m-l,
dx J P9'
where x.=x ±0. Note that u (x) and uP (
j= i1 1+(x)are nonvanishing
over the same interval [x ,xi+i
For the cubic Hermite interpolate (m=2), we have
s.(x) = f(x.)u +(x) + f(x )u + (x)u 1+
+ f(l) (xi 1)uK(x)
(25)
where the cubic element functions are
0-u (x) = 3 -- 2 X i 3 -0,1 x x<x, (26a) otherwise, 2 3 -i14 ( i+1~I i) 2x 2( 1-x -2 i+1~ if 0, 3 > li <X x i+l' otherwise, 1 -u. (x)= _ i-1 2
i-l-x i-x x -xi i i-1P
x <ix<xi otherwise, 0+ u.(x (26b) (26c) 0,9
2 3 ________i) I i+1 i
(x i+; x ) x i-Xj 1-x - i+1
1+
ui +X (26d)
0, otherwise.
These element functions are illustrated in Fig. 2.
The error bound of the general Hermite interpolation is
stated by well-known theorems in [9], [10]. Within the %
interval [xi, xi+1 ], the pointwise interpolation error for
one-dimensional neutron diffusion problems is bounded by
I
I--(f(x)-s. (x)) L 0 <Kjxi+1-xil (~)O<q<m-1,d 1 L(Ar)
where p=2m for this case and K is a positive constant
inde-pendent of jxi+1 --xil. The above expression states that the
bound in the pointwise error between f(x) and s(x) for a
piece-wise continuous function f(x) is of order 2m. Thus, for
the cubic Hermite interpolation (m=2), the error is
4
I
f(x)-s (x)| L (A)<K2i+1i 4of O(Ax 4). For the linear Hermite interpolation (m=1),
the error is
SIf(x)-s (x) II <KI i(+ 1~x)i 2
or O(Ax 2). The pointwise error in the derivatives is also
bounded with an appropriately lower exponent.
Now we consider the interval [a,b] partitioned into (M-1) contiguous subintervals. We can approximate the unknown so-lution of a problem over the whole interval by a sum of piecewise approximations, using a set of element functions
u 0-(X) xi 1 x1+1 xi-i1 slope = 1 1-u. (x) i xi+1 xi-i
FIGURE 2. One-dimensional Cubic Element Functions
u 0+ xi-1 1 xi I-Xi+1 1+() xi-1 u X i Xi+1
7
1
in each subinterval, {uf , u'*, up-: 2<i<M-1, o<p<m-1}. Thus,
s(x) incorporating cubic Hermite element functions can be rep-resented by M-1 s(x) = [ s.(x) i= 1 M-i 1 ( )-I 1 0 (x+)up+x ()+f(P (x.)u+1(x)} M-1 + 0+ - 0 ()+ 1+
{f(x+)u. (x) if(x+1 )ui+1(x) + f (+)ju((x)
i(1)
1-+ ( (x )u (x)}, (27)
where s (x) represents the Hermite interpolate in the element
A., defined by Eq. (23). The f's are unknowns to be
deter-mined.
Function and derivative continuity can be naturally preserved by requiring
f(x+) = f(x.) = f(x.)
2<i<M-1 (28)
f ( ( x ) - f ( ( x - f (1)(x i)
The conditions (28) lead to generation of the basis func-tions appropriate for the approximation of an unknown solution inside the interval [a,b], preserving function and derivative continuity across the interfaces. These coupled basis
func-tions are illustrated in Fig. 3.
For neutron diffusion problems, however, we want to re-quire current continuity across the partition interfaces. This condition can be met if the 1-type (first derivative) basis functions are redefined in the following manner:
i
u. (x)
i
slope = 1
xi+1
FIGURE 3. Cubic Basis Functions Appropriate for Function and Derivative Continuity 0
u. (x)
1
xi-1 xi
o u (x x, D(xi) u.(x) = (29)
o
1+ + u + , x <x<x i+l D (x.) 1+where 0 is a normalization constant and uJ (x) are given by
Eqs. (26c, d). The normalization constant 0 is introduced in
order to produce stiffness matrices having small condition
numbers [7]. We usually choose 0 such that D ~ 1. These
D(x.) modified basis functions are illustrated in Fig. 4.
If piecewise linear element functions are used, we will be able to preserve only function continuity across the
par-tition interfaces. The element functions, illustrated in Fig. 5a, are represented by
x-x. x i - li-1 i u. (x) = (30a) 0 , otherwise, Xi+l- x < 0+ u (x) = (30b) 0 , otherwise,
When the p oper coupling conditions (functions con-tinuity) are imposed, we will have defined the basis func-tions for the expansion, as illustrated in Fig. 5b.
u 0
uu (x)
slope = (x
i-1 i i+1 i-1
xi x.i
16
slope D(x.)
FIGURE 4. Cubic Basis Functions Appropriate for Flux
and Current Continuity Across Interfaces x
.1
u. (x) u 0+
1
K
x .
1 xi+l x x
FIGURE 5a. Linear Element Functions
u0
xi+l xi xi-l
FIGURE 5b. Linear Basis Function Appropriate for Flux Continuity Across Interfaces
xi-1
xi+l
It can be shown [7] that for the Hermite interpolate
s(x) [given by Eq. (27)] of the function satisfying the weak
form of the diffusion problem, the error bounds are
(f (x) - s (x)
)<K~x(mq
, <q<m-1dx q LO [a, b]
where Ax = max Ix i+l-xi and K is a constant independent
l<i<M-1
of Ax. Thus, for the linear Hermite interpolation (m=l), the error in the function approximation is
2
II(f(x)-s(x))
, <Kx 1AxL '[a,b] 2
or O(Ax ). For the cubic Hermite interpolation (m=2), the
error is 4 II (f(x)-s(x))||I <K2 Ax L'[a,b] 4 or O(Ax ).
2. Construction of Basis Functions in Two Dimensions
We now consider a two-dimensional region Q=[a,b]x[c,d] and assume an orthogonal coordinate system. Using Cartesian
coordinates, we define Tr to be a partition of Q such that
7T: a=x 1<x 2<- -<xM = b
(31)
c=y <y2< ...<yN = d.
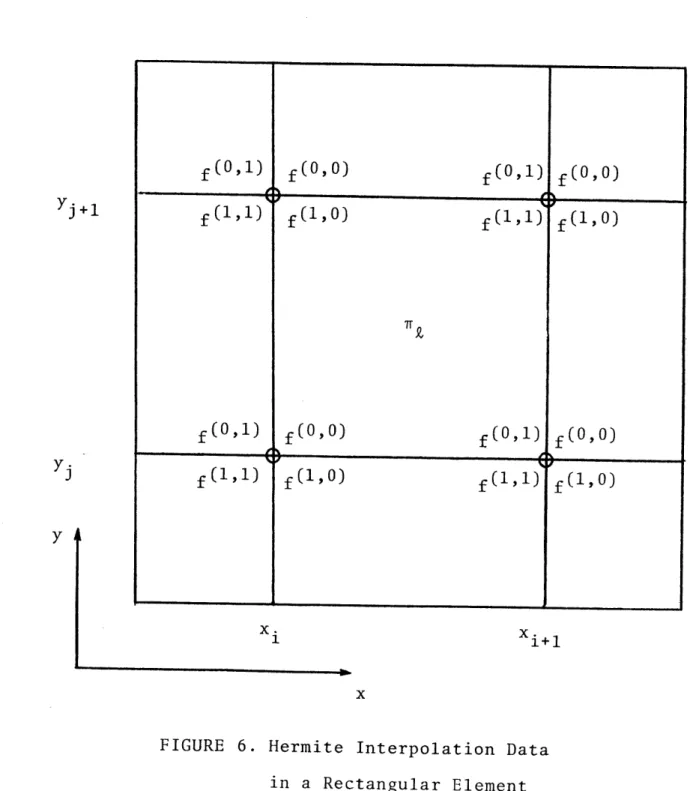
The set of all mesh points generated by 7 will be denoted Z,.
aenoted f., for k 2 1, 2, ... , L, with L = (M - 1) x (N - 1).
Each element 'rr has a set Z of 4 mesh points, namely the
corners of the mesh element. (See Fig. 6.)
The element functions in two dimensions are generated
by taking products of the one-dimensional element functions
in each direction. For instance, the two-dimensional
bi-cubic Hermite interpolate s,(x,y) in a mesh element 7r (see
Fig. 6) can be represented by
s (x,y) = f upx+(x)upy+(y) + p =0 p =0 i'Ti xy + fpx uX (x)u (y) + (i+1, i) (ExP) Ex+ p -+ f(XY) u, (x)u ( + 1 j+1) + f yj+1 u x )u (y) , (32)
where the subscripts (x ,y ) on f denote a value of the
function or its derivative at mesh point (i,j), and the
superscripts (pxp y'denote the p th derivative in the
x-direction and the py th derivative in the y-direction. Note that there are 16 coefficients (i.e., values of f) required to
specify a unique s (x,y). For this Hermite interpolation,
the interpolation data required to specify s,(x,y) are the
function values at the 4 mesh points of the element 7 ., the
first derivative in each direction at the 4 mesh points, and 2
the 4 mixed derivatives at each mesh point, i.e., at
each corner. Thus we have 4 values, 4 derivatives in x, 4
Yj+1
f(1,1)
f(1,o0)
(1,1
F f(o,1) f(090) f(o,1) I yj f(1, r1) (1 .o) f(1, 1) y i xi+1 xFIGURE 6. Hermite Interpolation Data
Hermite data are illustrated in Fig. 6.
The uniqueness and the approximation error for the Hermite interpolation are stated by theorems (with proofs)
in [7]. It is shown that a two-dimensional polynomial
interpolate s ,(x,y), incorporating sufficiently smooth func-tions, satisfies the following expression for the pointwise error bound:
(f(x,y)-s ,(x,y))| <KAx(2mx-px) +
o ~x y L ( + K A (2my-py) y y (33) for 0Op <m -,
O<p
<m -1where K and K are positive constants independent of Ax
and Ay, respectively, and where (2mx -1) and (2m Y-1) specify
the degree of the one-dimensional polynomials in each
direc-tion. Consequently, for the case of bilinear and bicubic
Hermite interpolation we have the following pointwise inter-polation error bounds:
j~~xy)s(xy)~2 2
f(xy)-s (xy)| L(7) <K Ax + K Ay (linear)
<K Ax + K Ay (cubic)
i.e., O(Ax2) + O(Ay2) for the linear and O(Ax 4) + O(Ay 4) for
the cubic interpolation.
In the region [a,b] x [c,d] partitioned into (M-1) x (N-1) contiguous subregions (or elements), we can approximate the
unknown solution of the problem over the whole region by a sum of piecewise approximations, using a set of element
(p , y)
functions in each mesh element, {u..
7
' : 1<i<M, 1<j<N,-O<p <m -l, -O<p <m -l}. Thus, the interpolate s(x,y)
incorporating bicubic Hermite element functions can be repre-sented by
L
s(x,y) = I st(x,y)
Z=1
N-1 M-1 1 (p ,p ) p +xp[ (y) +
j=i
i1p =0 p =f (i'7j) 3x y
+ f x'y0 u +(x)u y (y) +
(xi+1 '7
+fp P up x+ (XUp +
+f xEy91 (x)u. (y) +
(x ,yj +)
+ f x'E y u P+(x)u p (y) , (34)
(i+1'7j+13 i l ~
where s (x,y) represents the Hermite interpolate in the element ff
As in the one-dimensional case, basis functions for two-dimensional neutron diffusion problems can be defined
by imposing appropriate coupling conditions on the element
functions. The unknown solution of a two-dimensional problem
can then be approximated by considering a convenient partition of the problem domain.
First we consider the use of bilinear element functions. In this case there is one basis function at each mesh point which is defined by
0+ 0+ u. (x)u. (y), I 1 j 0- 0+ (0,0) u. (x)u. (y), II u (x,y) = 1 J 0-
0-u (x)u (y), III (35)
0+
0-u (x)u (y), IV
where the roman numerals refer to spatial mesh elements
sur-rounding point (ij) (as shown in Fig. 7). The piecewise
linear functions u. 0>x) 0 (y) are defined by Eq. (30).
1 J
up0,0)(x,y) is continuous; however, it does not satisfy the
continuity of D -1.
Next, we consider the construction of bicubic basis
functions from cubic element functions. These basis
func-tions depend on the diffusion coefficients surrounding a point (ij). Thus we consider two cases separately.
Case 1. DID III= D1 IDiV
This condition is satisfied for any interior mesh
points or interface points except the singular points. The
proper basis functions are given by (see Fig. 7):
0+ 0+
u. (x)u (y), I
0- 0+
u. (x)u. (y), II
u(0,0) (xy) = (36a)
1J 0-
0-u. (x)0-u. (y), III
1 J1
0+
0-u. (x)0-u. (y), IV
u(1, U. 0)(xy)(xy (x)u (xu ()0+ 6 1-u I 1-(x ou 1+ DwIui
(
0+ (x)u. 21(y), 0-)u.~(y),x)u0- xi.()
(y)
I II (36b) III IV or and y
III ma be replaced by D 0IV and DIII respectively.
u (0,1),y)(xi) 0 0+ D-U-II 1+ (x)u. (y) , (x)u. (y) 3 0 u0 (x)u1 (y), I I2 6 1+
III (x)u 21(y), I (36c) III IV or D and D may u ij (x,y) = be replaced by a I 01+ 1+
nU. (x)u. (y),
DI 121 u ( D u x)u. (y) (x)u. 21 and D respectively. IV I II (y), III 0 1+ 1 -- U (X)u.j (y), IV (36d)
6 denotes a normalization constant and is generally taken
such that -~l. D u(x), u(y), p=O, 1, are cubic element
13
functions defined by Eq. (26). The basis functions satisfy
the interface conditions of neutron flux and current contin-uity.
Case 2. DID III/ D ID I
In this case, point (ij) is a singular point. It is well known that the diffusion approximation fails in the neighborhood of material interfaces, where the solution has transients. We do not expect analytic solutions near singu-larities to truly represent the physical neutron distri-bution. Furthermore, from a practical point of view, in many problems one is more interested in overall measures of
core performance (e.g., keff- reaction rates in assemblies
or larger regions). In these cases one may argue that,
whatever the analytic singular component of the solution, it is a localized effect and its contribution to the overall results should be very small.
In calculations of realistic two-dimensional problems, on the other hand, one will have some pattern of zones with different fuel enrichments throughout the core, so that many
of the actual mesh points will be singular points. We
expect the singularity to be a function of the magnitude of the material discontinuities. A singularity will have a
greater influence at water-fuel interfaces than at interfaces between fuels of different enrichments.
singular points in problems where one is primarily concerned with region-averaged quantities (e.g., reaction rates for
depletion analysis). For instance, when DID III/ D ID y it
is easy to show that the interface conditions of current continuity permits P(x,y) to have only
-D(x)Y) (i,j) " (xY) I (i,
j)
=0.Therefore, in Eq. (36), u 0? 1)(x,y) and u '0 (x,y) could be eliminated, leaving the proper basis functions to consist of two functions
u(0,0)(x,y); Eq. (36a),
(37) u .' (x,y); Eq. (36d).
1J
However, since the analytic solution at singular points is
not necessarily required to satisfy 4-4(xy) 1 c(xy) =0
the use of the basis functions defined by Eq. (37) can distort the solution and can lead to poor approximations, especially for coarse mesh calculations.
Another approach would consist of arbitrarily speci-fying first derivative continuity by making all coefficients
= 1 in Eq. (36). This approach intuitively seems
conv-enient for singular points surrounded only by fuel regions, where diffusion coefficients do not change drastically.
Another approach takes advantage of the fact that, in the weak form of the diffusion problem, acceptable solutions are the functions which satisfy the conditions
(i) 4(x,y) is continuous in 0,
(38)
This condition relaxes the current continuity condition, and thus it would be desirable to choose basis functions at the singular point which are continuous but for which the first derivatives are unspecified. The reason for this particular choice is that we want the approximation schemes themselves to choose the optimal coupling relation. Below we present such a set of basis functions, which has a minimum number of functions but whose first derivatives are not unnecessarily restrained, i.e., they are uncoupled.
u 0) (x,y) = Eq. (36a) (39a)
1- 0+
u. (x)u (y),
1 3
(1- 0) 1-
0-u (x,y) = u (x)u (y),
0,
1+ 0+
u. (x)u (y),
(1+, 0) 1+
0-u (x ,y) u (x)u (y),
0, (0,1- , 0+ 1-u9 1-(x,y) =u (~ y, 0+ 1+ u xu. (y) (0,1+) 0- 1+ u ,y) =u q (x)u6(x u. (x,y) = Eq. (36d). II III I & IV I IV II & III III IV I & II II III
eS
IV
(39b) (39c) (39d) (39e) (39f)II I III IV i-1 i i+1 0,0) (0,1) ij
LI0,
13x
(1,0) U (2j;
(a) Eq- (36) (0,0) U.. (0, (0,1-) u U.. 0 (1. 1 U..-I
13I
I
>
1
(b) Eq. (39)Bicubic Basis Functions Yj+1 y. Y-1
I
22?
U - -ij
(
XU.-I FIGURE 7.
These functions are shown in Fig. 7. There are six
inde-pendent basis functions. u(0,0) and u satisfy both
13 13
the continuity of flux and currents. The remaining
func-tions are partially coupled basis funcfunc-tions, and so the interface conditions are partially satisfied by these
func-tions. Note that the coupling between u.-.') and u ,
1J 1J
and u(0,1-) and u(0,1+) are unspecified so as to be
deter-1J 1j
mined by a particular numerical scheme, say the Galerkin scheme. Numerical results [7], [11] indicate that approx-imations using these sets give better convergence on flux shape and eigenvalues than those using basis functions whose derivatives are erroneously fixed, such as the functions
e
given by Eq. (37) or the functions defined by setting = 1
for the coefficients in Eq. (36).
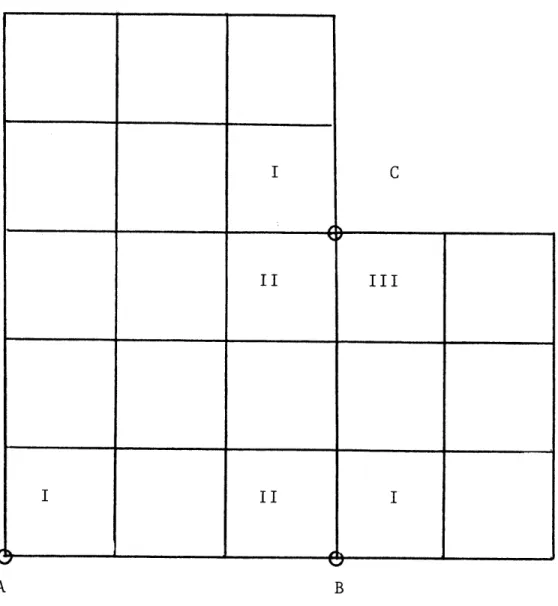
Generation of basis functions on the boundary can be considered as a special case of the above considerations. These are obtained by coupling element functions whose sup-ports are nonzero (i.e., element functions which are nonzero
in a particular boundary region). For example, consider the portion of a rectangular mesh as shown in Fig. 8. The basis
functions at point A coincide with element functions in region I. The basis functions at point B are obtained by coupling two element functions in regions I and II. Finally, the basis functions at point C are obtained by coupling three element functions defined on regions I, II, and III.
As in the one-dimensional case, it can be shown [7] that for the Hermite interpolate s(x,y) {given by Eq. (34)] of the function satisfying the weak form of the two-dimensional
of a Rectangular Mesh
A B
diffusion problem, the error bounds are 8(px~p )KA (2m -p X)+ apxa p y
(f(x,y)-s(x,y))|I
(m) <KL p + (2m -p)
+K y y Y y for O<p <m -1, O<p <m -1, - y-- y where Ax = max+--l<i<M -1 li+1i-il- A l<j<N- max 1 j+1~ j , aand K
and K are constants independent of Ti and A. Consequently,
for the case of bilinear and bicubic Hermite interpolation we have the following interpolation error bounds:
2 2
If(x,y)-s(x,y)|| L <Kx 1Ax + K 1 Ay (bilinear)
4 4
<Kx,2Ax + Ky,2Ay (bicubic).
K ,K and Kx, 2, Ky,2 are the upper bounds of K and K
for the bilinear and bicubic approximations, respectively.
3. Varying Cross Sections within the Expansion Element
We have tacitly assumed up to this point that the diffusion coefficient is a piecewise constant function. However, the weak form of the diffusion problem is properly posed for a more general behavior of the diffusion coef-ficient. In particular, a unique solution to the problem
will exist if D(x,y) takes the form of a piecewise con-tinuous function rather than a piecewise constant function.
From the theoretical viewpoint, piecewise continuous diffusion coefficients present no particular difficulties.
From the viewpoint of approximation methods, the change merely alters the evaluation of elements in the coefficient matrix.
The number of basis functions or unknowns is approxi-mately equal to some integer times the number of mesh points, and we assume that mesh points are always located at element
interfaces. If the system we are modeling has many material
discontinuities, then we will have many unknowns. It is
evident, therefore, that if the spacing between material discontinuities is very small, then finite difference meth-ods may be adequate for the problem, and one need not con-sider higher-order methods. On the other hand, it seems attractive to use coarse meshes with some higher-order
method in an attempt to arrive at accurate solutions with a
small computing burden. For highly heterogeneous systems,
it is clear that we must consider the problem of mesh ele-ments which extend over material discontinuities. Finite
elements techniques incorporated in the code CHD were devel-oped to address this problem.
The techniques employed in CHD use element and/or basis functions which are smooth within their region of definition. Material property discontinuities within this region are
accounted for in the basis function inner products. The
approximate solution, therefore, will be smoother than the actual solution, although the effects of the discontinuities
will be averaged into the approximate solution through the elements of the coefficient matrix.
4. Matrix Formulation of the Multigroup Diffusion Problem
We now present the matrix form of the equations which result from the application of the finite element method to
the multigroup diffusion problem.
As was done in the development of the two-dimensional basis functions, we will consider a partition of the problem
domain in Cartesian coordinates. The partition will place M mesh points along the x-axis and K mesh points along the
y-axis. As for physical considerations, a PWR analysis, for
instance, which uses a mesh grid coinciding with the core assembly interfaces produces remarkably accurate results.
Consider now Eq. (20a) specialized to the cases of
general downscattering (with no upscattering) and no extraneous
source (which defines an eigenvalue problem). The
within-group scattering cross section is subtracted from the total cross section to form the removal cross section, Z
rg Thus we have
-V-D1 VD $1 (x,y) -V-D V( (x,y) SErl 1
(xy)
+ Erg (xy) X G g '=1 g-1 + X Z ,D g'-1 sgg g g=2, ... , G.group flux approximation
M N K(i,j) D (x,y) = Y X I g i=1 j=l k=l can be written as g a.. u..k(x,y),
where K(i,j) is the number of basis functions at point
It i assumed that M, N, and K(i,j) are the same for all energy
groups. We apply the Galerkin scheme to the weak formulation
of Eq. (41) and that 5 satisfies
+ (Erl 1,uijk)Q = G Xi = A fg'g, ijk Q gA-(D V Vu ijk)Q2+ rg (Dg, uijk)Q g-l ug X g=2, sgg' g, ,u G. for i=l, j=l, k=l, where (u,v) ... , M ... , K(i,j) I = f uvdV.
Rewritten in matrix operator form, Eq. (43) becomes
S- F} a -X G 9 g (x,'y) (x~y) fgI g The ,(x,y), (41) (42) (ij). G g = 1 ijk) Q' (43) (D 1 ,llv uijk G I v X, {& 0, 1 (44)
where
al, *.., ajG1
The form which the a takes can be seen from examination of
Eq. (42).
In a two-group problem, for example, Eq. (44) can be written in the general form
[0 O
LJ( a
a2X
F
ja
I " Is
(45)a=21 =221 -2 -21 O-2'
or, as two coupled matrix equations,
L a [El[Fa, + Fa]
-l -1 11: - =12-2J
L a , F a 2] a(46)
- 22 2 1 22 21 1
where the L matrices incorporate the diffusion and removal
=g
terms the Fg, matrices incorporate the fission terms, and
the S21 matrix incorporates the group 1 downscattering terms.
The term F2 1a, is the source of fission neutrons to group 2
arising from fissions occuring in group 1, and F2 2 22 is the
source of fission neutrons to group 2 arising from fissions occuring in group 2. In the usual two-group analysis,
however, these two particular fission sources are assumed to
be negligible (i.e., x2=0), and Eq. (46) reduce to the more
common form of the two-group equations,
L1 1 I [ a= +
(47) k2-2 = 21 11
A few comments should be made regarding the forms of