A modified secant formulation to predict the overall behavior of elasto-viscoplastic particulate composites
Texte intégral
Figure





Documents relatifs
It has been shown that the use of the macroscopic strain and stress as references in the context of the ‘second- order’ homogenization method leads to simple and accurate estimates
The present study introduces a methodology that allows to combine 3D printing, experimental testing, numerical and analytical modeling to create random closed-cell porous materials
In addition, the new self-consistent estimates will be shown to satisfy a recently established bound (Kohn & Little 1999), for a cer- tain class of model
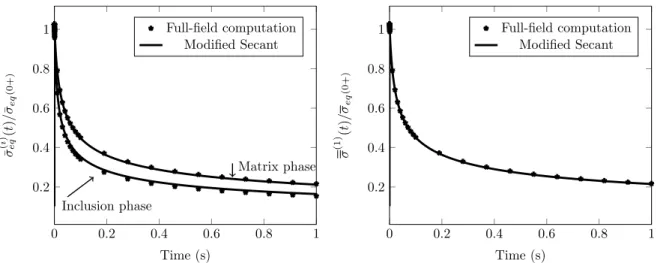
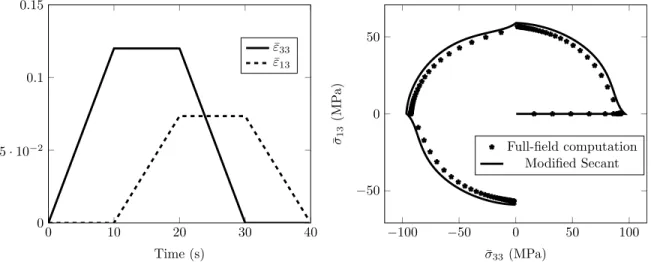
In view of this, the present work uses the nonlinear variational homogenization method (Ponte Casta˜ neda [29]) or equivalently the modified secant method (Suquet [43]), which makes
In other words, we get the surprising result that the enriched trial field ( 15 ) does not improve the classical Hashin and Shtrikman bounds on the e ffective elastic properties..
Using the separator algebra inside a paver will allow us to get an inner and an outer approximation of the solution set in a much simpler way than using any other interval approach..
The addition of EOC decreased the Young’s modulus and yield stress of PP while the presence of talc fillers increased the Young’s modulus of
Adopting a stress-based approach, we have extended the classical variational principle of Hashin and Shtrikman (1962a) to stress-gradient materials, first for periodic
