RÉPUBLIQUE ALGÉRIENNE DÉMOCRATIQUE ET POPULAIRE
MINISTÈRE DE L’ENSEIGNEMENT SUPÉRIEURET DE LA RECHERCHE SCIENTIFIQUE
Mémoire
PrésentéAU DÉPARTEMENT DE MÉCANIQUE
FACULTÉ DES SCIENCES DE L’INGÉNIEUR
UNIVERSITÉ DE BATNA
Pour obtenir le titre deMAGISTÈRE EN GÉNIE MÉCANIQUE
Option : Construction MécaniquePar
Riad Abdenouri
Contribution à la modélisation des structures
mécaniques sous sollicitations sévères
Soutenu publiquement le : 30/01/2007, devant le jury composé de :
Dr. A. DJEBAILI M.C. Centre Universitaire O. El Bouaghi Président Dr. K. ZIDANI M.C. Université de Batna Rapporteur
Dr. R. BENBOUTA M.C. Université de Batna Examinateur
Dr. M. BRIOUA M.C. Université de Batna Examinateur
Remerciement
Ce travail a été effectué dans le département de mécanique. Je remercie le bon DIEU, mes parents, mes frères et toutes les personnes qui me sont proches.
J’exprime ma sincère reconnaissance envers mon encadreur Dr.
K
AMELZIDANI
pour m’avoir encadré, soutenu et conseillé tout au long de ce travail.Je remercie également tous les enseignants du
Table des matières
CHAPITRE I NOTIONS DE LA MECANIQUE DES MILIEUX CONTINUS ... 7
I. Référentiel et repère ... 8
I.2. Déformation ... 9
I.2.1. Etat de déformation sphérique et état de déformation déviatorique ... 9
I.3. Contraintes ... 9
I.4. Equation d’équilibre ... 10
I.5. Comportement élastique ... 10
I.6 . le comportement élasto-plastique ... 10
I.6. 1. L’expérience de traction simple ; limites d’élasticité ... 11
Remarque ... 13
1.7. Cas d'une sollicitation uniaxiale ... 15
1.7. 1. Matériau écrouissable ... 15
1.7.2. Matériau parfaitement plastique ... 17
1.7.3. Sollicitation multiaxiale en domaines d’élasticité ... 18
CHAPITRE II MODELES ANALYTIQUES D’ETUDE DU COMPORTEMENT ELASTO- .
PLASTIQUE ... 20
Introduction ... 21
II.1. Les critères de plasticité ... 21
II.1.1. Critère de von mises ... 22
II.1.1. Frontière d’écoulement ... 22
II.1.2. Critère de Tresca ... 23
II.1.2.1. Frontière d’écoulement ... 23
II.1.3. Le critère de hill ... 24
II.2. Hypothèse de la théorie de plasticité ... 24
II.2.1. Règle de normalité. « plasticite associée » ... 24
II.2.2. Règle d’écoulement ... 25
II.2.2.1. Sollicitation uniaxiale pour un matériau écrouissable ... 26
II.2.2.2. Sollicitation multiaxiale pour le materiau ecrouissable ... 28
II.2.3. Evolution de la surface de charge ... 30
II.2.3.1. L’écrouissage isotrope ... 30
II.2.3.2. L’écrouissage cinématique ... 30
II.2.3.3. L’écrouissage mixte ... 31
II.3. Déduction de la matrice élasto-plastique par la mécanique des milieux continus ... 31
II.3. Mesure de l’endommagement ... 33
II.3. 1. Méthodes statique ... 33
II.3. 2. Méthode dynamique par ultra-sons ... 34
CHAPITRE IV RAPPEL SUR LA MECANIQUE DE LA RUPTURE ... 40
IV.1. Historique ... 41
IV.1.2. Hypothèses et cadre de l’étude ... 42
IV.1.2.1. Endommagement et mécanique de la rupture ... 42
IV.1.2.2. Fissures statiques, quasi-statiques, dynamiques ... 42
IV.1.2.3. Modes de rupture ... 43
IV.1.2.4. Mécanique linéaire, et non-linéaire de la rupture ... 43
• Etude d’un milieu élastique fissuré ... 44
• Plasticité confinée ... 45
• Plasticité étendue ... 45
IV.1.3.1. Facteurs d’intensité des contraintes ... 46
IV.1.3.2. Calcul des facteurs d’intensité des contraintes ... 46
• Eléments singuliers ... 47
• Méthode des fonctions de poids ... 47
• Calcul par extrapolation ... 47
IV.1.4. Approche Globale ou Energétique ... 48
IV.1.4.1. Le taux de restitution d’énergie ... 48
VI.1.4.2. Intégrales de contour ... 49
VI.1.4.3. Calcul du taux de restitution d’énergie ... 50
• Calcul par avancée réelle de fissure... 51
• Méthode de l’intégrale J ... 51
• Calcul par avancée virtuelle de fissure ... 52
• Méthode Gθ ... 53
- La variation d’énergie potentielle totale Wp ... 53
- Propriétés du champ θ ... 54
- Expression du taux de restitution d’énergie ... 55
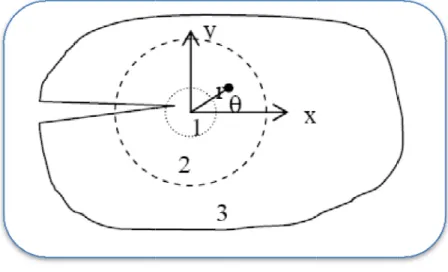
VI.1.4.4. Maillage Concentrique ... 55
CHAPITRE V SIMULATION NUMERIQUES PAR LE CODE CASTEM2000 ... 57
Introduction ... 58
V.1. Dimension de la structure ... 58
V.2. Modélisation numérique ... 59
V.3. Distribution des contraintes et des déformations ... 59
V.4. Géométrie maillée ... 60
V.5. Charge appliquée ... 60
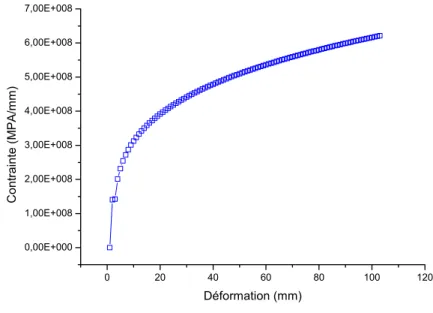
V.6. Courbe de traction ... 61
V.7. Courbe de temps pour la manipulation de la procédure pas à pas ... 61
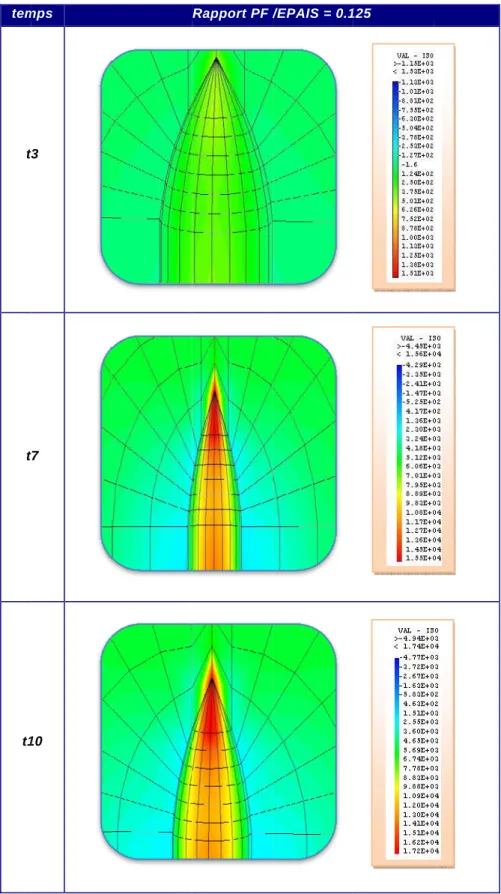
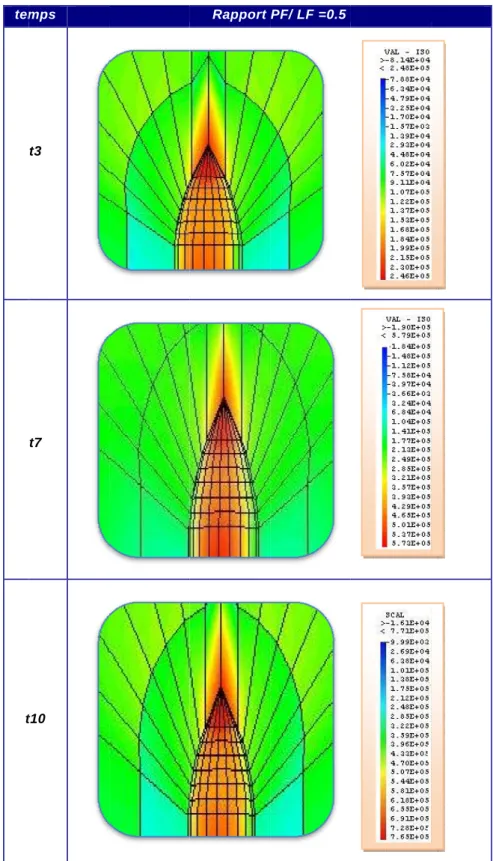
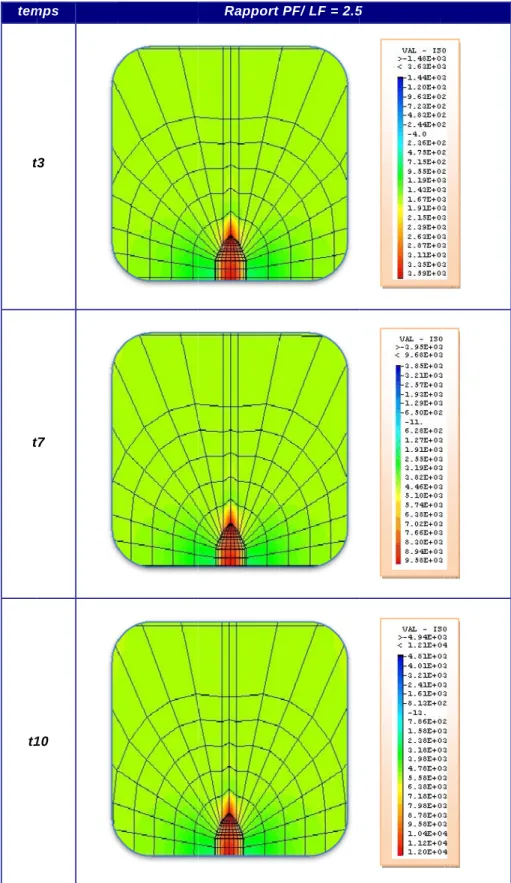
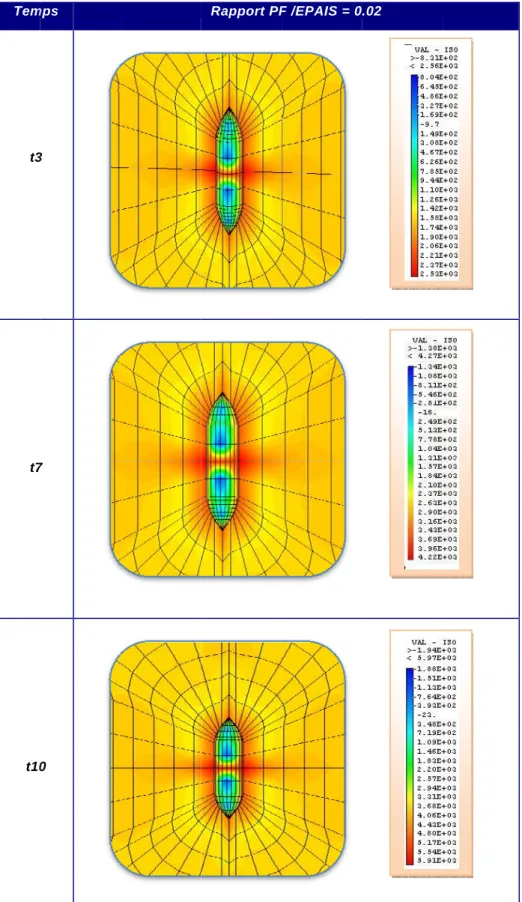
V.8. Résultats des contraintes de Von Mises ... 62
V.8.1. Interprétation des résultats des contraintes de Von Mises ... 74
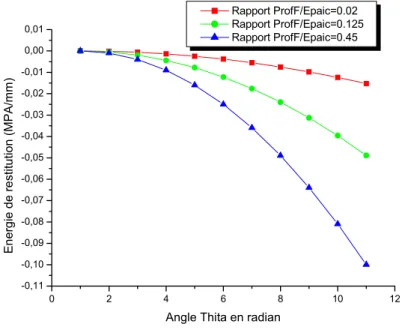
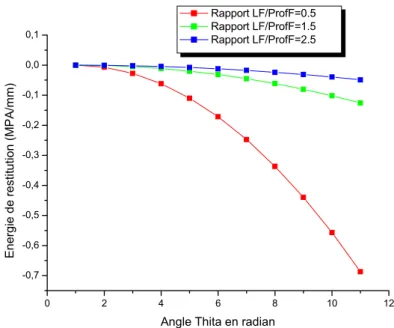
V.9. Les résultats du calcul de l’énergies de restitution pour les diférentes géométries ... 74
V.9.1. Interprétation des résultats relatifs à l’énergie de restitution ... 76
V.10. Le facteur d'intensité des contraintes ... 77
V.10.1. Interprétation des résultats des facteurs d'intensité des contraintes ... 79
V.11. Interprétation globale des résultats ... 80
BIBLIOGRAPHIE ... 83
Introduction générale
Le travail entrepris est une contribution à l’analyse de la réponse d’une structure mécanique soumise à des sollicitations mécaniques complexes. La structure en question est une conduite utilisée dans le transport sous des pressions et des gradients de température importants de fluides. La conduite en question, présente une fissure initiée sur sa face interne. L’étude présente des intérêts aussi bien techniques qu’économique. L’intérêt technique réside dans la mise en place d’un outil fiable de prédiction du comportement et de la stabilité et permettant la modélisation et la conception de ces structures mécaniques. L’intérêt économique réside dans le fait de pouvoir éviter les conséquences désastreuses relatives à la rupture ou la ruine de ces structures. La littérature traitant de la mécanique élastique linéaire de la rupture, nous renseigne que pour ce type de problèmes mécaniques, la région critique se situe généralement en pointe de fissure. Il est par conséquent important de pouvoir disposer des outils mathématiques permettant la modélisation des divers comportements mécaniques, en particulier, ceux régissant les comportements plastiques et élasto-plastiques des matériaux utilisés dans la conception de ce type de structures.
Le cylindre présentant une fissure interne initiée est sujet à une pression de service relativement importante, il s’agit de pouvoir faire une étude paramétrique incluant les différents paramètres aussi bien géométriques que de chargement qui influent directement sur la stabilité de la fissure. La littérature nous informe qu’en pointe de fissure se localise généralement une zone plastifiée dont il convient de prendre compte lors de toute étude. En relation avec l’importance de cette zone, plusieurs modèles ont été proposés pour l’approche des champs de déplacement et de contraintes. Dans notre étude, nous nous intéressons particulièrement aux comportements élasto-plastique et plastiques des matériaux.
Notre objectif principal est d’étudier et de montrer, par une simulation numérique en élasto-plastique utilisant le code de calcul Castem2000, l’influence des paramètres : effort appliqué, facteur de plasticité, la géométrie du cylindre et la géométrie de fissure.
Un des aspects principaux de ce travail consiste à établir une étude de sensibilités des principaux paramètres qui influent directement sur stabilité de la fissure. Le plan de rédaction de la thèse est le suivant :
• Nous commençons par un premier chapitre présentant un rappel de la mécanique des milieux continus avec une description sur l’élasticité linéaire.
• Le deuxième chapitre est consacré à une bibliographie en relation avec les différentes lois de comportement en particulier, les comportements élasto-plastique et plastique.
• Le troisième chapitre est consacré aux différentes notions de la mécanique de la rupture (énergie de restitution, facteurs d’intensité de contraintes :KI, KII, KIII, KIC) ainsi que les méthodes de leurs calcul.
• Le quatrième chapitre est consacré à l’étude par éléments finis d’un cylindre fissuré à l’aide du code de calcul Castem2000.
CHAPITRE I
NOTIONS DE LA MECANIQUE DES
MILIEUX CONTINUS
I. Référe
La repérag plan ini de Kirc exprimé Où moyenn Soit points Où ; L’invers Ainsi leentiel et repè
formulatio ge du systè tial et la hhoff, les v ées par rap{ } {
X
q=
est le vec ne en , , , et q par{ }
dXq =[F0]−{ }
dxq =[Fz] e se du tense[F] e tenseur de
[B]
ère
n mathém ème étudié a forme 3D vectrices po pport au po} {
z
0n
0X
p+
cteur de d est la coo Fig I.1 : le repère rapport à P{ }
[ 1 dx où F −{ }
[ ] dx où st l’élongat eur gradien 1 0 1 [ ] [ ]− = F − F e Cauchy– 1 [ ] [ ]− = F −T F atique néc é tout au lo D de la pièc ositions ini oint P situé}
{ } {
0=
x
p−
déplacemen ordonnée à : Cinématiqu e local orth P est donné [ ]1 , 0 F − = xpx− [ ] [Fz = xp,x+ tion d’épais nt de déform 1 ]− z FGreen gau 1 ]− F
cessite que ong de son ce finale so tiales et fin sur la surfa
} {
z
0n
0u
p+
nt du poin à travers l’é ue d’un élém hogonal. Le é par : , , ,x py p p x u u − ,n,x xp,y z + sseur (sup mation en qche entre q
e l'on proc évolution nt considé nales d’un ace moyen
}
0ntp , es épaisseur in ment en défor e tenseur ] / , 0 3 ,y n λ
] ,n,y n z
posée con q est obten
q et peu
cède à la au cours d rées. En ut point maté ne de C (v
st la norm nitiale. rmation. gradient de
stante à tra u par form
ut être défin
description du temps. S tilisant l’hy riel q peuv .1) :
ale de la e déformat
avers l’épa mule (I.2) et
ni par :
n et au Seuls le pothèse vent être
(I.1)
surface tion aux(I.1)
(I.2)
aisseur). t (I.3) :(I.3)
(I.4)
Chapitre Le calc λ , λ e l’hypoth I.2.
Défo
Il co Il existe d’usage représe I.2.1.Eta
Il e d’un te T = S + D volume volume I.3.Cont
Les une rép contrain On a do en M d projecti le vecte représe IJ ε = Icul des vale et leur mat hèse.
rmation
onvient de e des cham e de dire q enté par leat de déforma
st toujours nseur sphé D, Dans le sans cha constant.traintes
s efforts ex partition su nte en un p onc une re ans la dire on sur la d eur contrai ente le vect 1 2 I J u u X X ∂ ∂ ∂ ∂ ⎛ = ⎜ + ⎝ eurs propre trice de tra bien différe mps vectorie que, dans tenseur deation sphériq
s possible érique S et cas du tens anger la fo ercés sur u urfacique d point matér Fig I.2 eprésentatio ection . On direction de inte tangen teur contra 1 2 J I I J u u X x ∂ ∂ ⎞ ⎛ = + ⎟ ⎜ ⎠ ⎝ es de ansformatio encier la no els de dép le cas de es déformatque et état de
de décomp t tenseurs seur de dé orme alors une facette de forces. iel est sché 2 : État de co on par un v n peut alor e la normal ntielle (a inte projeté J I u x ∂ ∂ ⎞ + ⎟ ⎠ donne deu on M. L’élo otion de dé lacement q e petites p tions linéaie déformation
poser un te déviatoriqu formation, que le te e d'un milie La représe ématisée s ontrainte en vecteur du rs définir la le du vec appelé ciss é dans le p ux élongati ongation d’ éplacement qui ne crée perturbation res défin déviatoriqu
enseur de ue D. Les f le tenseur nseur dév eu continu p entation la ur la figure un point ma type , a contrainte cteur contra sion ou co lan de la fa Mécanique ons princip épaisseur t de la notio nt aucune ns, l'état d ni par :ue :
deuxième formules so sphérique iateur D c peuvent êtr plus fréqu e ci-dessou atériel. appelé e normale ainte , ontrainte de acette on a e des milieux pales dans est calculé on de défor déformatio e déforma ordre sou ont les sui associé ch hange la f re représen uente de l s. vecteur co comme . De mêm e cisaillem : x continus le plan ée avec rmation. on. Il est tion est(I.6) s forme vantes : hange le forme à ntés par 'état de ontrainte étant la me on a ent) qui
(
)
(
)
(
)
,
.
,
,
n n nT M n n
n T M n
n T M n
n
σ
τ
σ
=
= ∧
∧ =
−
r
r r
r
r
r
r
r
r
r
r
(I.7) I.4.Equation d’équilibre
À partir des expressions des puissances virtuelles des efforts extérieurs et des efforts intérieurs, on obtient les équations de la statique :
g
(M t R, / ) div f M t( , )
ρ γr = → σ +ρ r (I.8) I.5.
Comportement élastique
Selon le dictionnaire du groupe français de rhéologie de 1988: L’élasticité exprime la « tendance d’un corps à reprendre la forme et les dimensions qu’il avait avant une sollicitation, lorsqu’on supprime cette sollicitation ». Un corps est idéalement élastique lorsqu’il évolue de manière totalement réversible (sans déformation permanente), et que toute transformation subie produit une dissipation nulle. Elle s’écrit par une relation inversible entre la contrainte et la déformation. Par exemple, lorsque cette relation est linéaire et isotrope, la loi de l’élasticité de Hooke (17ème siècle) est la plus simple (1.5):
E
T
)E
(I.10)
Où : , , sont respectivement les composantes des tenseurs des contraintes, des déformations et de la tenseur unitaire. T ) Est la trace du tenseur des déformations. Enfin λ, sont les coefficients de Lamé.
E,
ν
sont le module d’Young et le coefficient dePoisson.
I.6 . le comportement élasto-plastique
Le schéma élasto-plastique pour le comportement des matériaux, a été élaboré à partir de constatations expérimentales relatives au comportement tridimensionnel des métaux. Actuellement, on résout par voies analytiques ou numériques, des problèmes d’élastoplasticité en calcul des structures (structures réticulées, structures à barres fléchies), des plaques et coques métalliques, et l’on utilise aussi ce modèle pour l’analyse de structures en béton [01].
Le modèle de comportement élasto-plastique classique ne tient pas compte de tout effet de vieillissement et de viscosité du matériau. Du point de vue des formules mathématiques par lesquelles on représente le comportement plastique, cela implique :
1. en conséquence de l’absence de vieillissement, l’invariance par translation sur la variable temps ;
2. en conséquence de l’absence de viscosité, la réponse (déformation) du matériau à la variation élémentaire de sollicitation (contrainte) effectuée à un instant donné, se produit en totalité simultanément à cette variation et est indépendante de la vitesse avec laquelle celle-ci est effectuée.
Chapitre Le mod suivant 1. le é e 2. la m
I.6. 1. L
On con compor I dèle de co s: es domaine évidence d exemple) et a règle d’ multiaxialesL’expérience
Fig I nstate, l'ex rtement du mportemen es d’élastic ans les ex t qui sont é ’écoulemen s, la façon dde traction s
.3 : Expérien xistence d matériau d nt élasto-pl cité, qui gé xpériences étroitement nt plastiqu dont évoluesimple ; limit
nce de tracti (vitesse d 'un seuil devient irré Fig I.4 : lastique s'a énéralisent en sollici liés au phé ue qui déf e la déformtes d’élasticit
on simple po de déformati pour la co versible Fig Limite d’élas appuie sur la notion d tations un énomène e finit, dans mation plastté
our un matér ion fixée). ontrainte, g I.4. sticité . Mécanique les conce de limites d iaxiales (tr essentiel d’ le cas d tique. riau écrouiss soit σ , àe des milieux epts fondam d’élasticité, raction sim écrouissag des sollic sable à partir du x continus mentaux , mis en mple par ge ; citations uquel le
On cha décharg Après représe plastiqu On pro celle-ci décrit lo Quand monoto Ainsi lo ( ) ap de cont représe forme arge l'épro ge. La déc décharge entée par ( ue ( ). cède alors s'effectue ors de la d la contrain one. ors de la no paraît com trainte et d entation du d’un diagr ouvette au charge suit totale, il (OC) sur la Fig I.5 : C à une nou en suivant décharge; te (σ) dépa Fig ouvelle cha mme le nouv e la déform u modèle d ramme rel u-delà du sur le diag subsiste a Fig I.5: c Charge et dé uvelle char t le trajet ( le comport asse ( ), l g I.6: Courbe rge effectu veau seuil mation dans de compor iant la co point (A) gramme le une défo cette défor écharge "ma rge: tant qu CB), identi tement dem e point rep e de chargem uée à partir en traction s la partie rtement co ontrainte σ jusqu'en chemin (B ormation p rmation per atériau écrou ue la contr que, au se meure réve présentatif s ment monoto r du point (C n. En suppo utile de l’é rrespondan σ à la déf (B), puis, BC) et non permanente rmanente e uissable". rainte reste ens de parc ersible tout suit la cour one. C), La vale osant l’hom prouvette, nt pour le formation on effect le chemin e de l'épr est la défo e inférieure cours près, t au long d rbe de char eur de la co mogénéité d la Fig I.6 d matériau ε selon l’ tue une n (BAO). rouvette ormation e à ( ), , à celui de (CB). rgement ontrainte de l’état donne la sous la ’axe de
Chapitre l’éprouv plasticit de plas déforma
Remarq
Pour ce irrévers en part Le mod viscopla alors sc Le phén de ( ), cas « m une fon Ce phé plastiqu traction présent tel com illimité Ainsi, p valeur ( I vette. Sur té. Après c sticité est é ation permque
ertains ma sible, c'est-iculier, pou dèle de co asticité et d chématisé nomène ob , correspon matériau à nction crois énomène, ue. Ainsi la n simple ef te un palier portement et l’on dit q pour le mod (σ ) et, lors ce diagram charge jusq égale à : anente apr tériaux, le -à-dire inéla ur l'aluminiu Fig I.7 : Ex d’alumin omporteme de vieillisse par la cour bservé à la nd au cas d écrouissag sante de ( quoique le Fig I.8 rep ffectuée su r pour des est modéli que le mat dèle élastiq squ’elle atte mme, σ e qu’au nivea ce résulta rès décharg diagramm astique, de um comme xpérience en nium : Influen ent élasto-p ement : le rbe uniqueFig I.6, où du matériau ge positif » ). e plus rép présente le ur une épr déformatio isé selon le tériau corre que-parfaite eint cette v est la limite au , la lim at est parfo ge est la dé e contraint e la vitesse montrée s traction sim nce de la vit plastique c comportem de la Fig I. ù la limite a u dit écroui » pour tradu pandu, n’es diagramm rouvette d’ ons allant d e diagramm espondant ement plas valeur il y a e initiale d mite actuel ois appelé « éformation te-déforma e de déform ur la Fig I.7
mple sur une esse de défo classique l ment du ma 6. actuelle d’é ssable; on uire le fait st pas gén e relevé da ’acier doux e 10 à 10 me de la Fig est élastiq tique, la co possibilité Mécanique d’élasticité lle d’élastic « Principe plastique ation, dépe mation ε ad 7. éprouvette ormation. aisse de c atériau en t lasticité ( précise m que le seu néral pour ans le cas x : on con 0 (ordres g I.9 avec ue et parfa ontrainte ne d’allongem e des milieux ou seuil in cité ou seu de Coulom . nd, dans l optée; c'es côté tout e traction sim ) est une ême dans uil de plast le compo de l’expérie nstate que s de grande un palier p aitement pl e peut dép ment illimité x continus nitial de il actuel mb ». La a partie st le cas effet de mple est fonction certains icité est ortement ence de celui-ci eur). Un plastique astique. asser la é.
Fig . On revi Après la On con trouve l’écroui traction compre segmen compre après é Pour l’a déforma décharg compre (algébr compre phénom g I.8 : Expéri . ient à la F a décharge Fig I state alors ramenée à ssage en n, s’accomp ession. Ce nt [-σ ,σ ] ession simp écrouissage acier doux, ation plast ge de la ession est iquement) ession, la c mène n’est ence de trac un matéria ig I.6 de la e suivant (B I.10 : Expérie s que la lim à la valeur traction qu pagne d’un phénomèn définit le ple tandis q e en tractio , si l’on eff ique sous traction e égalemen et que, s contrainte t pas pris ction simple au a courbe d BC) on soll ence de trac ite d’élastic r (σ ), sup ui correspo ne diminutio ne est con e domaine que le segm on simple ju fectue une contrainte et charge t ramenée si l’on pou rejoint rap en comp pour . de charge-d icite la mêm ction-compre cité en com périeure (a ond à un on (en vale nnu sous e initial d ment [-σB,σ usqu’à la va première constante en compr e à une va ursuit la c pidement u te dans la Fig I.9 : Re élastique décharge d me éprouve ession: effet mpression, lgébriquem relèvement eur absolue le nom d’ d’élasticité σB] définit l aleurσB. charge en égale à σ ression, q aleurσB, lé harge ave un palier à a modélisa eprésentatio e parfaiteme d'un matéri ette en com de Bauschin initialemen ment) à (-σ t de la lim e) de la lim effet Baus du maté le domaine traction ju on const ue la limi égèrement ec déforma la valeur ation du m n schématiq ent plastique au "écroui mpression F nger. nt égale à ( σ ). Autrem mite d’élast mite d’élast schinger [ ériau en t e actuel d’é usqu’à obte ate ensuite ite d’élasti supérieure ation plasti -σ , Fig I matériau é que. e. ssable". Fig I.10 (-σ ), se ment dit, ticité en ticité en [02]. Le traction-élasticité enir une e, après icité en e à -σ ique en .10. Ce lastique
Chapitre parfaite compre
1.7. Cas
1.7. 1. M
Au cou d’élasti comme plus à d Si l’on l’atteind suffit à compor En se r indé bien ide que l’o matéria les circ I ement plas ession sontd'une sollici
Matériau écro
urs de l’hi cité initiale e en élastic définir σ et connaît à dre à partir à détermin rtement est reportant au pendante d entifiées, o n connait au et donc onstances stique qui des consta Fig I.11 : Exitation uniax
ouissable
stoire de e, l’apparit cité, corresp vice-versa la fois la de l’état in ner la var t alors dite u diagramm de la vitess on voit plus σ et ε qui la position suivantes: F pose que antes Fig I xpérience dexiale
chargeme tion des d pondance a. contrainte nitial nature riation corr de type inc me de la Fi se de char s préciséme suffit, ave de σ par Fig I.12 : la li les valeur .11 e traction-co nt du mat déformation biunivoque actuelle σ el, alors la d respondant crémental. g I.7 où la rge et le ent que dε ec ε, à dét rapport à l imite d’élast s limites d ompression: tériau, dès ns perman e entre σ et σ et tout le donnée d’u te de la a courbe de es droites dε est déterm
terminer l’é a limite d’é icité actuelle Mécanique d’élasticité acier doux. s que l'on nentes fait t ε : la don e trajet de une variatio déformatio e première de décharg minée en f état d’écro élasticité a e. e des milieux en tractio n franchi l qu’il n’y nnée de σ n charge su on de contra on dε. La charge est ge élastique onction de uissage ac ctuelle. On x continus n et en a limite a plus, ne suffit uivi pour ainte dσ loi de t unique e toutes dσ dès ctuel du n a ainsi1. Si σ réve 2. Si σ déc (c'e défo 3. S c q
d
σ est inférie ersible, don σ est éga harge: la st-à-dire q ormation à ed
d
ε
=
ε
Si σ est é charge: la partie réve que l'on ré irréversible ed
d
ε
=
ε
+
eure à la lim nc puremen le à la lim variation qu'une déc sa valeur a Sid
σ
égale à la variation ersible et d' écupère en e est le com pd
ε
+
mite d’élast nt élastique Fig I.13 : la mite d'élas de déform charge (–d antérieure)0
<
Fig I.14 : se limite d'éla de déform 'une partie effectuant mplément p Si
d
σ
icité actuel e : dε = dε a variation d ticité actue mation est dσ) effectu , alors:euil d'élastic asticité act ation est d irréversibl t, après la pour obtenir
0
>
le: la varia ∀ le signe e la charge elle et dσ réversible uée après
cité actuelle. uelle et dσ décomposé e. La parti charge dσ r la variatio
tion de déf e de dσ. < 0, corr e, donc pu s la charg
σ 0, cor ée, comme e réversibl σ, la décha on de défor
formation e respondant urement é ge dσ ram
rrespondan e la somm e est la pa arge -dσ. L rmation tota
est alors t à une lastique mène la
(I.11)
nt à une e d'une artie d a partie ale:(I.12)
Chapitre Le mod E= Dans le tangent Et Le mod Μ D'où: = 1 Et Le mo corresp au cas alors né
1.7.2. M
Pour le uniaxia I dule d'élast e d d ε σ =e cas où le t" par la rel
ε
σ
d d = dule d'écrou p d dε
σ
= Μ Μ + =1 1 Edule d’écr pondant au où la cour égatifs [03]
Matériau parfa
e matériau le se prése Fig icité E est dpoint de ch ation:
0
>
σ
d
uissage du
d
σ
>
0
rouissage diagramm rbe de char ].
faitement pla
parfaitem entent com I.15 : la vari défini dansharge est à
matériau é
M est po e de la Fig rge, après
astique
ent plastiq me indiqué iation de déf chaque étà la limite d
étant:
ositif pour g I.3 le mat avoir crû j que, les ré és sur la Fig formation tot at (ε, σ) pa
d'élasticité
le matér tériau à écr usqu’à un sultats de g I.16 Mécanique tale. ar:
actuelle on
iau écroui rouissage n maximum, l’expérien e des milieux
n définit le "
issable cla négatif corr décroît E ce en soll x continus
(I.13)
"module(I.14)
(I.15)
(I.16)
assique, respond , M sont icitationSi σ es élastiqu
d
ε
Si σ es variatiod
ε
Si σ est entièremd
ε
La défin tangent1.7.3. So
L’ex sollicita général tenseur compte évidenc tout tra entièrem réversib rapport tracé s l’interse st inférieure ue ed
ε
ε
=
t égale à la on de déform ed
ε
ε
=
si t égale à la ment irréve0
≥
=
d
ε
pε
nition du m t comme leollicitation m
xpérience m ations quele, une sol r des contra e des symé ce l’existen ajet de ch ment à l’in bles). Ce d à la sollic ur l’axe de ection du Fig e à la limi
∀
d
σ
a limite d’é mation est
d
σ
<
0
a limité d’él ersible
module d’él e module d’
multiaxiale en
monoaxiale peut subir llicitation q aintes σ (te étries nce d’un do harge de ntérieur de domaine no itation unia es σ à la domaine d g I.16 : Matér te d’élasticélasticité σ purement
asticité σ
asticité est écrouissag
n domaines d
e évoquée un élémen quelconque enseur de C , i, j 1, omaine d’é l’élément ce domain oté C est a axiale, il ap Fig I.17. O d’élasticité riau parfaitem cité σ : laσ et si dσ < élastique
et si dσ =
t évidemme ge sont éga
d’élasticité
ci-dessus nt de milie e de l’élém Cauchy), é , 2, 3 . Par élasticité in de matièr ne, les déf ainsi défini pparaît com On peut dir initial ave ment plastiq variation d< 0, corres
0 : la varia
ent inchang aux à zéro. ne représe u continu t ent de ma élément de les résulta itial conten re, partant formations dans l’esp mme l’homo re aussi qu ec la droite que. de déforma
spondant à
ation de déf
gée. En rev ente qu’un tridimensio atière est c l’espace ats expérim nant l’origin t de l’état sont élast pace R de ologue du s ue le segm e « sollicit ation est pu
une décha
formation e
vanche, le cas particu onnel. D’un caractérisée (ou en mentaux on ne, et tel q t naturel e tiques (c’es es tenseurs segment
[
ment [− , tation en t urement(I.17)
arge : la
(I.18)
est alors
(I.19)
module ulier des ne façon e par le n tenant met en ue pour et situé st-à-dire s σ. Par
σ , ]
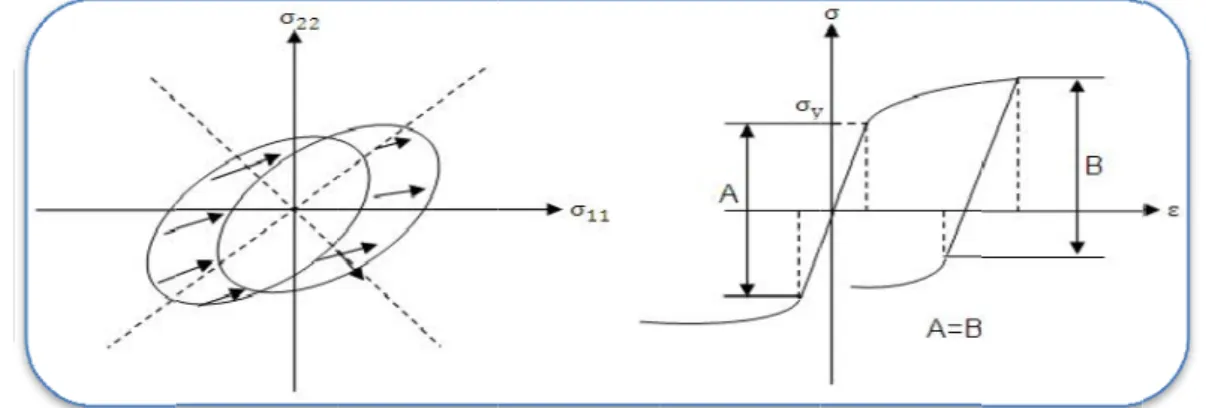
] esttraction-Chapitre compre réalisée 1970), contrain de l’aut défini d I ession ». D e dans l’ex où les se nte normale tre Fig I.17 dans l’espa -dire le plan Fi et to De même, d xpérience eules comp e σ et la 7, on obtien ace 6 avec n d’équatio ig I.17 : Epro orsion d’un t déter dans le cas de traction posantes n contrainte nt un doma c le sous-e ons = ouvette pour tube mince miné expérim s d’une so n-compress non nulles de cisaillem aine d’élas espace cor = = r l’expérience ; exemple d mentalemen llicitation p sion et tor s du tense ment σ va sticité qui e rrespondan = 0. e de traction de domaine i t (H. D. Bui, Mécanique plus comple rsion de tu eur des co ariant indé est l’interse nt à la soll n-compressio nitial d’élast 1970). e des milieux exe telle q ubes mince ontraintes pendamme ection du d icitation ap on ticité x continus ue celle es (Bui, sont la ent l’une domaine ppliquée
CHAPITRE II
MODELES ANALYTIQUES D’ETUDE
DU COMPORTEMENT ELASTO-
PLASTIQUE
Chapitre II Modélisation du comportement élasto-plastique
Introduction
La construction des modèles de comportement non linéaire des matériaux comporte deux volets : l’étude des propriétés rhéologiques et la définition de la forme des équations pour un chargement tridimensionnel. La rhéologie, étude des écoulements, permet de relier les contraintes, les déformations, et leurs dérivées, et caractérise la nature des comportements. On va voir dans ce chapitre que les comportements les plus complexes se bâtissent à partir de briques élémentaires.
a. Le ressort, qui symbolise l’élasticité linéaire parfaite, pour laquelle la déformation est
entièrement réversible lors d’une décharge, et où il existe une relation biunivoque entre les paramètres de charge et de déformation Fig II.1.a.
b. L’amortisseur, qui schématise la viscosité, linéaire Fig II.1.b ou non linéaire Fig II.1.c. La viscosité est dite pure s’il existe une relation biunivoque entre la charge et la vitesse de chargement. Si cette relation est linéaire, le modèle correspond à la loi de Newton.
c.
Patin représenté la plasticité Fig II.1.d.
Ces éléments peuvent être combinés entre eux pour former des modèles rhéologiques.
a) σ=
E εb)
σ=
ηc) =
ησ
d)-σ
yσ
yFig II.1 : Les « briques de base » pour la représentation des comportements. II.1.
Les critères de plasticité
Lorsqu’un solide est soumis à un champ de contraintes σ, celui-ci se déforme avec un champ de déformation ε. Ce dernier peut être décomposé en la somme de deux déformations :
ε ε
eε
p(II.1)
Avec:
est la déformation élastique, proportionnelle à σ selon la loi de Hooke:ε = K σ
(II. 2)
:
est la déformation plastique. Celle-ci n’apparaît que lorsque le champ σ dépasse un certain état de contrainte. La variation de cette « limite élastique », fonction de , définit l’écrouissage. Comme nous venons de le voir, le solide rentre en plasticité pour un certain champ de contrainte. Plusieurs critères ont été mis en place pour caractériser cette limite. Ils se présentent en général comme une relation de la forme :f(σ) < 0 avec : f(σ) =
σ
eq-
(II. 3)
Où , est la contrainte équivalente, est la limite élastique. La « zone limite de contrainte » pour laquelle cette relation est respectée s’appelle la surface de charge. Le modèle « plan orthotrope » possède quelques points remarquables qui peuvent être déterminés en trouvant la
limite élas dans les d - les points - les points - les points Différentes II.1.1.
Critèr
La forme l égale := ∑
II.1.1.Fronti
la sur révolution indépenda génératric Chemin de Déformatio Début de stique de d directions d s de cisaill s de tractio s de tractio s lois ont ére de von mis
a plus simp∑
,∑
tière d’écoule
rface d’éc de géné ante de ces parallèl e chargement. on élastique. la déformation Fig divers essa e contraint ement pur on biaxiale ons larges. Fig II.2 été élaboréeses
ple pour le∑
ement
oulement ératrice pa la pr es à l’axe plastique. II.3 : schéma ais. On peu te principa ; ; : Points rem es pour déf critère deest représ arallèle pl ression (1, 1,1). a représenta ut notamme ales : marquables d finir ce critè Von Mises
sentée da an (1,1,1), hydrostatiq ant la Frontiè ent noter de la surface ère. f ( 2 ) = 0,
ns le rep , voir la que, la fro ère d’écoulem les deux p de charge.
tel que 2 a
père princi Fig II.3 ontière d’é ment de Von oints de tr atteint une pal par u La plastif coulement n Mises. raction sim valeur (II un cylindre fication éta a donc d ple I.4) de ant des
Chapitre II II.1.2.
Critèr
La pla provoqué lorsque la matériau i premier, le Où et II.1.2.1.Fron
La sur le critère d la surface droite un n’étant pri Von Mises intermédiare de Tresca
asticité inte par les co cission ap isotrope, le e critère de=
: sont r
ntière d’écou
rface d’éco de Von Mis Fig II e d’écoulem hexagone ivilégié, on s, le critère aire n’in Fig ervient par ntraintes d ppliquée da es plans su e plasticitéespectivem
ulement
oulement es ses comme I.4 : schéma ment est u régulier de retrouve l de Tresca ntervient pa II.5 : schém glissemen de cisaillem ans un plan ubissant le de Trescament la con st un hexag le montre représentan n prisme d e côté 0 a symétrie a est défini as, car elle
a représenta nt des plan ment le long n atteindra e cisailleme s’écrit :
trainte de gone inscr la Fig II.4. nt la Frontièr de générat 2/3, inscri e d’ordre 3 à l’aide d’u n’influe pa ant le critère Modélis ns atomiqu g de ces p une valeur ent maxima
cisaillemen
rit dans l’el
re d’écoulem rices paral t dans le c autour de un seul par as sur la va e de Tresca e sation du com es les uns plans. La p r critique k al atteindro
nt et contra lipse précé ment plane de llèles à l’a cylindre de l’axe (1,1, amètre . leur du cis en trois dime mportement é s sur les a lasticité se k. Dans l’hy ont la valeu
ainte princip édemment e Tresca. xe (1,1,1) Von Mise 1). Comme La contrai aillement m ensions. élasto-plastiqu autres qui e déclenche ypothèse d ur critique
(II pale. obtenue po et de sect s. Aucun a e le critère nte princip maximal. ue est era ’un en I.5) our ion axe de ale
II.1.3.
Le crit
On pa un incrém maximal é de contrai celui dont contrainte Prenons [ L’expressi ∑ On peut dd
Où
dλ : es II.2.Hypoth
II.2.1.Règle
La rè maximal dp(σ, , le cas oùitère de hill
art d’un éta ent de défo énonce que nte situés t le travail [σ ] admis σ*] = [σ] + ion du trava
∑ onc écrire
=
st un scalai
hèse de la thé
de normalit
ègle de n implique est dirigé ù σ est un t de déform ormation no e pour un in à l’intérieu est maxim ssible que + [dσ] un te ail étant δ:
ire multiplic Fig
éorie de plast
té. « plasticit
ormalité c la convex suivant la n point rég mation plas ormal à la s ncrément d ur ou sur la mal. C’est à le tenseur enseur sur δW=∑cateur. II.6 : L’incré est normal
ticité
ite associée »
concerne la xité du do a normale gulier de la stique [εp] e surface d’é de déforma a surface d’ à dire que réel [σ], le la surface le principément de déf à la surface
»
a règle d’é omaine C(E extérieure a frontière et on appliq écoulement ation plastiq ’écoulemen si on asso e travail de d’écoulem pe de Hill sformation pla d’écouleme écoulement E). Le ta e à C(E) a de C(E), o que des co t [dεp] Fig II que donné, nt, le cham ocie à [d ] e [σ*] sera ment ([σ*] n ’écrit :
astique ent. t. Le princ ux de u point de on a sur la f ntraintes [σ .6. Le princ , parmi tou mp de contr tout autre inférieur à ne peut être
cipe du trav déformatio e charge σ figure Fig I σ] provoqua cipe du trav s les cham rainte réel e tenseur d à celui de [ e en dehor
(II
(II
vail plastiq on plastiq σ. Ainsi, da I.7: ant vail mps est des [σ]. rs). I.6) I.7) que que ansChapitre II • L'incrém puisqu'ils
• La surfa
• L'incrém et est don=
On dit alor II.2.2.Règle
La déf deux ques QUAND ? et de règle COMMENT ment de co sont perpe ace de plas ment de dé c parallèle=
λ
rs que la lo
d’écoulemen
finition du stions suiva (y-a-t-il dé es d’écroui T ? (s’effect Fig ntrainte n ndiculaires stification φ éformation et proportioi d'écoulem
nt
comportem antes : éformation p ssage, obje tue la défor II.7 : Princip rè ne fournit a s Fig II.8. φ (σi)est tou
plastique onnel à ∂φment est as Fig II.8 : S ment plastiq plastique). et de la sec rmation pla pe du travail ègle de norm aucun trava ujours conv est perpe φ/∂σ, ce qui
ssociée (à l Surfaces de p que se com Ce sont le ction précé astique). C’ Modélis plastique ma malité.
ail sur l'incr
vexe. endiculaire i détermine
la surface d plastification mpose sc s notions d édente. est la règle sation du com aximal : rément de d e à la surfa e une loi d'é
de rupture) n. hématique de seuils, d e d’écoulem mportement é déformatio ce de plas écoulemen
). ment de l e domaine ment plastiq élasto-plastiqu n plastique tification φ t de la form
(II a réponse s, de critèr que. ue e (σi) me: I.8) e à res
Quand on même co déformatio En d’autre déformatio chemin pa s’occupe permettan élémentair II.2.2.1.
Solli
Il est l’histoire d comme en définir ε et tout le tr variation d On dit la fig II.9, les droite est déter l’état d’écr actuelle. O réalise un ntrainte co on peut cor es termes on suivi. Po as à pas, c plus de l t de relier res.icitation uni
clair que de charge d n élasticité t vice-versa rajet de ch de contraint que la loi où la courb es de décha minée en rouissage a On a ainsi l n essai de orrespond rrespondre Fig II.9 : L l’état de c our connaît c’est à dire a partie é [σ], [d ] et [iaxiale pour u
e, dès que du matéria , correspo a. En revan harge suivi te dσ suffit de compor be de prem arge élastiq fonction actuel du m es circonst traction in à plusieur à plusieurs a contrainte contrainte tre l’état de e regarder élastique q [d ]. La déun matériau
e la limite u, l’apparit ndance biu nche, si l’o i pour l’att à détermin rtement est mière charg que toutes de dσ dès matériau et tances suiv terrompu p rs déforma s contrainte dépend du c pour une e contrainte à chaque que l’on c formation tu écrouissab
e d’élastic tion des dé univoque e on connait eindre à p ner la varia t de type in ge est uniq bien iden que l’on c t donc la po vantes, rep par plusieu ations et d es. chemin de la déformatio e ou de dé instant la onnaît). La totale étantble
cité initiale éformations entre σ et ε non seulem partir de l’é tion corres crémental. ue indépen ntifiées, o connait σ e osition de σ résentées rs décharg de la mêm a déformatio on donnée formation, variation d a loi d’éc t alors la so e a été f s permanen ε, la donné ment la co état initial, pondante d En se rep ndante de n voit plu t ε qui suff σ par rappo sur la Fig I ges, on con me manière on. dépend d il faudra d de [ε ] et d oulement omme des franchie, a ntes fait qu ée de σ ne ontrainte ac alors la d de la déform ortant au d la vitesse us précisém ffit avec σ, ort à la limi I.10. nstate qu’u e, une mê du chemin onc suivre de [σ], (on sera une déformatio au cours u’il n’y a pl e suffit plus ctuelle σ m donnée d’u mation dε. diagramme de charge ment que à détermin ite d’élastic une me de ce ne loi ons de us, s à ais une de e et dε ner citéChapitre II • Si σ est La variatio de dσ : • Si σ est la variation (−dσ) effec
dε =
• Si σ est variation d partie irrév après la c variation ddε =
Le module E= dσ
Dans les e un métal d charge est 1=
1 , E et M M est pos II.10, le m crû jusqu’à t inférieure on de défod
égale à la n de déform ctuée aprèsd si
égale à la de déforma versible, la charge dσ, de déformad +d
e d’élasticitσ/d
expérience donné (deu t à la limite
+
1sont des g itif pour l atériau à é à un maxim Fig II.10 : So à la limite rmation es
a limite d’él mation est s la déchar
dσ < 0.
limite d’éla ation est d a partie rév la décharg tion totale:si ; dσ
té E est défs effectuée uxième pro e d’élasticité
grandeurs e matéria écrouissage mum, décro ollicitation u irréversi d’élasticité t alors réve
lasticité act t réversible rge dσ ramè
asticité ac décomposé ersible est ge (−dσ), la
σ > 0.
fini dans ch
es sur les m oposition du é actuelle o
ayant la d u écrouiss e négatif c oît et M uniaxiale pou ibilité du com é actuelle: ersible, do
tuelle et dσ e, donc pu ène la défo
tuelle et dσ ée, comme la partie é a partie irr
haque état
métaux il a u « princip on définit le
dimension able classi correspond sont alors Modélis ur le matéria mportement. nc pureme
σ est négat rement éla ormation à
σ est posit la somme élastique d réversible e
(σ, ε) par :
pparaît com e de Coulo e « module
d’une con ique, corre au cas où négatifs. sation du com u écrouissab . nt élastiqu
if, correspo astique (c’e sa valeur a
if, correspo e d’une pa que l’on est le com
mme indép omb ». Dan e tangent »
trainte. Le spondant a ù la courbe mportement é ble, e quel que
ondant à un est-à-dire q antérieure)
ondant à u artie révers récupère e plément po
pendant de ns le cas o par la rela
e module d au diagram de charge élasto-plastiqu e soit le sig
II.1 ne décharg qu’une char :
(II.1
une charge sible et d’u en effectua our obtenir(II.1
(II.1
σ et d po où le point tion :(II.1 d’écrouissa mme de la e, après av ue gne 10 ge, rge 11) , la une ant, r la 12) 13) our de 14) age Fig voir
II.2.2.2.
Solli
Dans qu’au par représenta C(E) et à s Conna situations • Si σ paragraph • Si f • Si σ le compor du domain (II.5), il y af (σ,
E E(σ,
Ainsi, de disting L’arc de tr formulatio par exem E(σ,
il y a déchicitation mul
le cas gén ragraphe p ant le tens sa frontière Fig II.11 aissant σ e suivantes. σ est inté he précéden (σ, E) < 0, a est à la fro tement de ne d’élastic a charge si E) = 0
E
, ) =
lorsque σ guer la ch rajet de cha n précéden ple, critère E,) = su
harge si:ltiaxiale pou
néral de la précédent, seur σ dans e Fig II.11. : Comportem et l’état d’ rieur au d nte II.2.2.1. alors la var ontière du définir les cité est rég i :,
:
< 0
est à la fro harge et la arge neutre nte, le cas e de Trescaup {y : σ | y
ur le materi
sollicitatio mais on s l’espace ment incréme ’écrouissag domaine d iation de dé domaine d notions de ulière, et e0
ontière de décharge e e correspon où la front a, on écrira
y
E∂
f
(σ,
iau ecrouiss
on multiaxia doit dés e , et on ental élasto-ge actuel s d’élasticité éformation d’élasticité e charge e en définissaC(E), c’est et de défi nd à E (σ, E tière du do a: E
)}
sable
ale, le prob ormais rai doit se réfé -plastique éc symbolisé actuel c’e est purem actuel, il es t de décha ant celui-cit le signe d inir les ar E, ) = 0. L omaine d’é
blème se p isonner su érer au dom crouissable e par E on est-à-dire, ent élastiq st nécessa rge. En su par une fo
du scalaire rcs de traje es caractèr élasticité pr
pose de la ur le poin maine d’éla en décharge a l’une o avec les ue. aire pour po pposant qu onction de
E (σ, E, ) et de charg res, pour in résente des
même faç nt de char asticité act . u l’autre d notations ouvoir décr ue la frontiè charge se (II.1
(II.1 ) qui perm ge croissan nclure dans s singularit
(II.1 çon rge uel des du rire ère lon 15) 16) met nts. s la tés 17)
Chapitre II
f (σ,
EE
(σ,
et l’on po sollicitatio • Si σ déformatio élastiquesdε =
• Si σ est est décom partie réve partie irrédε = d
D’une faço de l’histoir trajet de c de déform charge σ e La déform à travers cd (σ
E) = 0
E, ) =
oursuit la d n uniaxiale Fig II .12 est à la f on est pure s, la formule
d = Λ :
à la frontiè mposé com ersible est éversible esd + d =
on générale re de σ. La harge crois mation plas et l’état d’é mation plast celle de l’hiσ
, E,
)= 0
,
: < 0
description e. 2 : Comporte frontière du ement élas e (II.11).s’eère du dom mme la so la partie é st le comp
= Λ : + d
e on peut d a fonctionn ssants, qui tique e crouissage tique ét istoire de σsi
E(σ
0
du comp ement incrém u domaine tique Fig I xplicite soumaine d’élas omme d’un élastique, r lément néc
d
dire que la nelle εpne r
définit aus engendré à e E, corresp tant une fon σ entre les iσ,
E,
) < 0
ortement é mental élasto e d’élasticit I.12. En dé us la formu
sticité actu ne partie récupérable cessaire po
déformatio retient, de ssi l’état d’é à l’instant pond à la d nctionnelle instants t e
Modélis
élasto-plas o-plastique é té actuel, ésignant pa le II.21:
el et s’il y a réversible e par déc our obtenir
on plastique l’histoire d écrouissage t par le ta dérivation d e de l’histoi et t +dt.
sation du com
tique, com écrouissable et s’il y a ar Λ le tens
a charge, l et d’une charge de ( le taux de
e à l’instan e σ, que la e actuel, re ux de cont e
ε
p par ra re de σ, cemportement é
mme dans e en charge. a décharge seur des co
e taux de partie irr (− ), soit : déformatio
nt t est une a séquence eprésenté p trainte , d pport à l’ins ette dérivat
élasto-plastiqu
(II.1
(II.2 le cas de e, le taux omplaisanc(II.2 e déformat réversible.
:
dε = Λ:σ, n total, soi(II.2
fonctionne e des arcs par E. Le ta dans l’état stant actue ion s’effect(II.2
ue 18) 20)la de ces 21) ion La La t: 22) elle de aux de el t. tue 23)
d (σ
, De plus, c l’échelle d de εp sur résulte quα >
Enfin, la est différed (
II.2.3.Evolu
L’évolu élémentair II.2.3.1.L’éc
Ce mo manière u compressi Fig . II.2.3.2.L’éc
Dans même tail dimension cours de laσ
, E,
) = 0
comme le du temps (f la même e dp (σ, E, )> 0, d (σ
relation en ntiable, elle(σ,
E, ) = P
ution de la su
ution de la res.crouissage iso
ode d’écrou uniforme, m ion simple, g II.13 : Ecroucrouissage cin
le cas de l le. Seul so n une, l’éca a déformatsi
E(σ
rappellent facteur d’é période s ) est positσ,
E, α) = α
ntre d (σ, e se met soP (σ,
E) :
urface de cha
a surfaceotrope
uissage est mais la for cela se tra uissage isotnématique
’écrouissag on centre e art entre lestion.
σ,
E,) > 0
t les terme chelle pos subit le mê ivement hoα d (σ,
E,
E, σ) et σ,s
ous la formarge
de charge t une homo rme et le aduit par un opique dans ge cinémat est déplacé s limites élaes « séque itif quelcon ême facteu omogène d
)
si
E (σ, E, ) me :est très othétie de l centre res ne évolutio s le plan. tique, la su . Il y a une astique de
ence » et « nque) d’une ur d’échelle de degré u
) >
0,
est licomplexe. a surface d stent les m n symétriq Fig II.14 : E es urface de c e « translat traction et
« trajet de e histoire d e sans au un en σ, c’e
néaire lors
Toutefois, de charge, mêmes. Po ue des limi crouissage i ssai de tracti charge gard tion » de la de compre
charge », s de σ donn utre modif st-à-dire qu
sque la fonc
, il existe la surface our un test ites élastiq isotopique a ion-compres de la même a surface d ession reste
(II.2
si l’on mod née, l’histo fication. Il ue :(II.2
ctionnelle ε(II.2 des modè s’agrandit t de tractio ues. avec un ssion. e forme, et de charge. e le même 24) ifie oire en 25)
ε
p26) les de on- t la En au
Chapitre II Fig II II.2.3.3.
L’éc
Comm Concrètem rayons au II.3.Déducti
L'écro détermine dissipé paf (
,
L’incrémen=
On peut é .15 : Ecrouis .crouissage m
me son no ment, cela gmentent ption de la ma
uissage pe la positio ar l'incréme,
E) = 0
nt de défor
crire:
+
ssage ciném
mixte
om l’indiqu veut dire proportionn Fatrice élasto-p
eut être int n de la su nt de défor
rmation pla
0
atique dans ue, c’est que le cen nellement leFig II.17 : Ecr
plastique par
troduit, dan urface de rmation plastique: le plan à la fois ntre de la es uns par rouissage m
r la mécaniq
ns la loi de plastificatio astique:Modélis Fig II.16 : E e un écrou surface de rapport au ixte dans le
que des milieu
e plastificat on à un ce
sation du com Ecrouissage essai de trac uissage iso e charge s x autres. plan.
ux continus
tion, par u ertain mommportement é cinématique ction simple. otrope et se déplace ne variable ment et au
élasto-plastiqu e pour un cinématiqu e, et que s e d'état E ssi, le trav
(II.2
(II.2 (II.2 ue ue. ses qui vail 27) 28) 29)On pose:
q
ij(II.30)
Nous savons déjà que:
=
.)
(II.31)
: Matrice d'élasticité.
En combinant (II.27), (II.28) et (II.29) on peut calculer:
. .
. . .
(II.32)
En remplaçant λ dans (II.28) et (II.30):
. (II.33)
. . . . . . (II.34)
DEP : est la matrice élasto-plastique.
Dans le cas de la loi de plastification de Von Mises qui peut s'écrire:
f
0(II.35)
R = 2 2 : variable d'état,: cohésion apparente
E E
E
)
(II.36)
qui implique :
=
(II.37)
Pour :
=
et
avec H =
.(II.38)
E : est le module de Young,
: Le module d'écrouissage définit graphiquement sur la Fig II.18, on peut appeler
Chapitre II II.3.
Mesure
L’endo quantitativ choisie po contrainte découlent la modifica II.3. 1.Métho
Repre précédent Ou : E : étant l être interp est connu D 1 σ/ soit : 1 Toute me petites. L’e très faible Pour toute 1. Uti l’ene de l’endom
ommageme ve, comme our représe effective, sont esse ation des codes statique
nons la loi t, qui sera j 1 le module prété comm , toute mes E ε , et av 1sure de m endommag de l’ordre es ces raiso lisation d ndommage Fig II.18 :
magement
ent n’est e celle de t nter le phé associé a entiellement aractéristiq
e
i d’élasticit ustifiée pa d’élasticité me le modu sure de raid vecmodule d’él gement est de 0.5 à 5m ons nous p des éprou ment, un e Essai de tra pas direc toute gran énomène [0 au principe t liées au ques méca té endomm r: é du matér ule d’élastic deur élastiq
asticité im le plus so mm. réconisons uvettes à exemple est action uniax ctement deur physi 01]. Ayant c e d’équivale couplage d nique des m magée unid riau vièrge cité du mat que permet
mpose une uvent très s la procédu section t donné su Modélis iale, loi de P accessible ique, est li choisi une d ence en déformation matériaux e imensionne de tout en tériau endo t d’atteindre
bonne pré localisé, c ure suivant centrale r la Fig II.1 sation du com Prandtl-Reus e à la m iée à la d définition fo déformatio n-endomma engendrée elle, déjà é ndommage ommagé. S e l’endomm
écision sur e qui impo te : affaiblie 9 à droite. mportement é s. mesure. S définition d ondée sur on, les me agement, c par l’endo évoquée au ement, 1 Si le modul magement p
r des défo se une bas pour bi élasto-plastiqu on évolut de la varia le concept sures qui c'est-à-dire mmageme u paragrap (II.3 (II.4 pe le d’Young par:
(II.4
rmations tr se de mesu en localis ue ion ble de en e, à nt. phe 39) 40) eut E 41) rès ure ser2. Me tem aus 3. Eva plu II.3. 2.
Métho
Le même mesure d cylindre d l’endomma et transve Dans le ca et en négl des expreOn tire D
=
esure de d mpérature l ssi petite q aluation du s fortes noode dynamiq
principe p e vitesse d’un maté agement pa rsales.adre de l’h igeant la va ssions :
=
=
1-
Fig II.19 déformatio le permet, ue possible u module d’ on linéarités
que par ultra
eut être ut ou de tem riau endom ar D=1-E E⁄ ypothèse d ariation de