Formal Timing Analysis Of Mixed Music Scores
Texte intégral
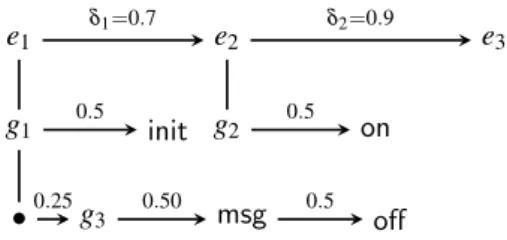
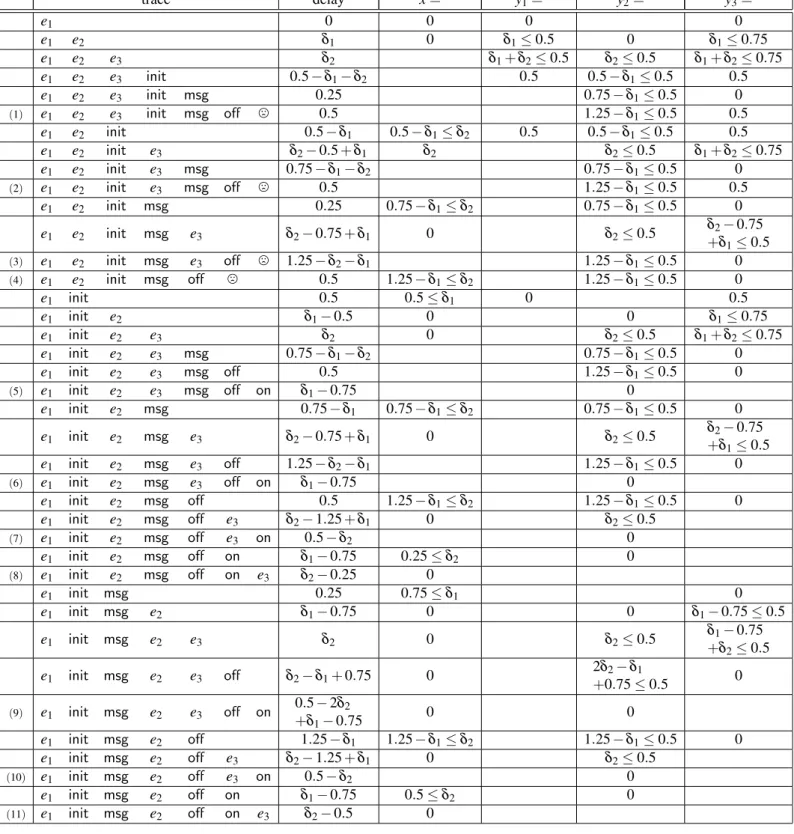
Figure


Documents relatifs
57.7 and 57.17 : “The following collective rights of indigenous communes, communities, peoples, and nations are recognized and guaranteed, in accordance with the Constitution
With this aim, it is necessary to define the modelling operations that make use of inheritance, explain how inheritance affects i* treatments and properties, and how
Obviously, Gulfian musicians and poets were very much inspired by Yemenite musicians, not necessarily through direct links but very often through links tied in the Arabian diaspora
it species a carrier type, functions and properties (both called the methods of..
This musical practice, that is based on the contact of instrumental and electronic music enhances both the traditional music analysis, based on the study of the sources and
From the outset of the project, the music teachers all decided to focus their work upon using computer software to support student composition – a common usage in most
Different types of ’events’ are defined by using the plasma flow velocity (V-events), the low frequency magnetic fluctuations (B-events), and the spectral density of higher
In the alignment of North Atlantic and Southern Ocean SST records to ice core records (see examples in section 7.1), we estimate age uncertainties during the penultimate
