Building reconstruction from a single DEM
Texte intégral
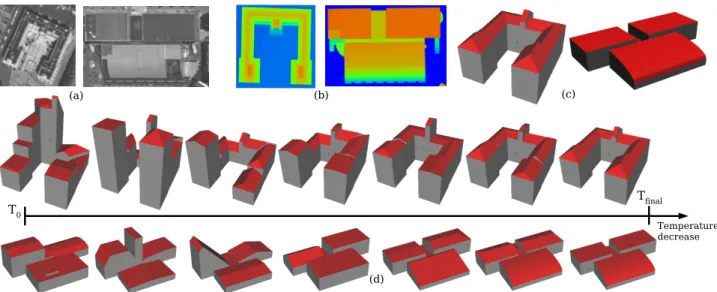
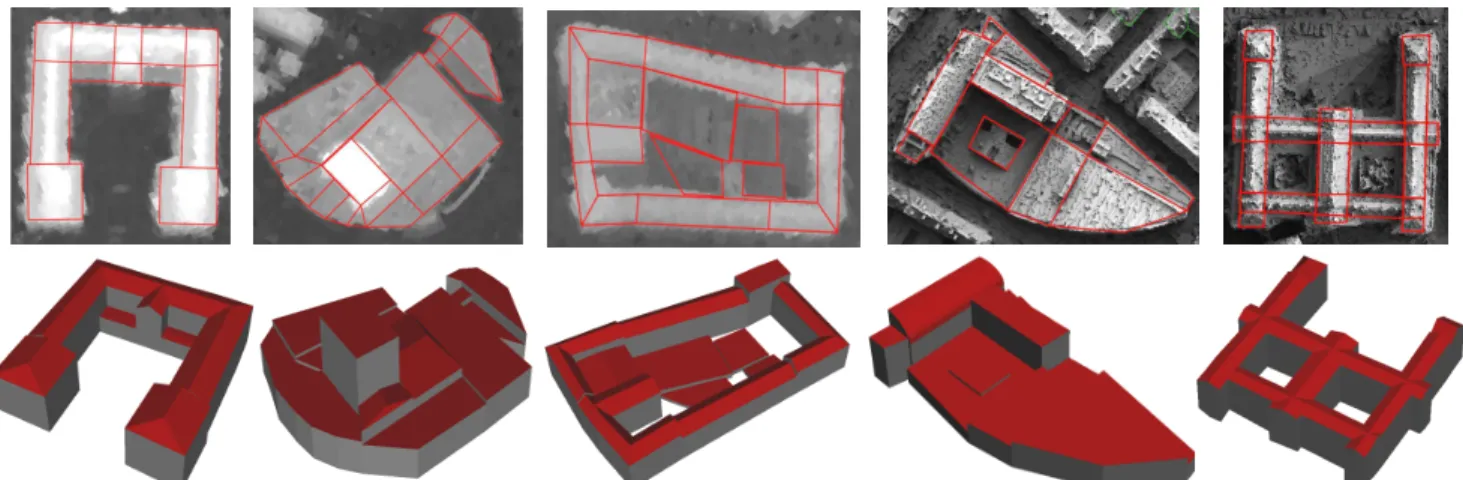
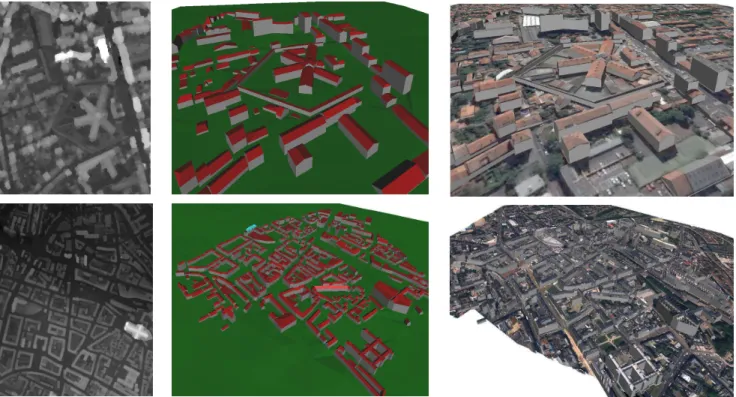
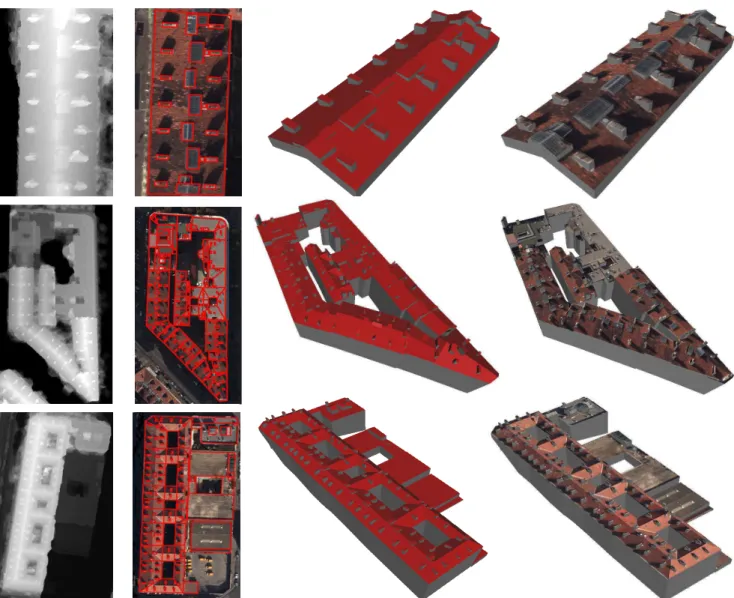
Figure
Documents relatifs
In this section, we will propose two different energy models, one extending the appearance model to multiple views and another evaluating the quality of the model with respect to
Novikov, Approximate solution of the inverse problem of quantum scattering theory with fixed energy in dimension 2, Proceedings of the Steklov Mathematical Institute 225, 1999,
Similitude et différence entre l’écoulement à travers un orifice et le tamisage d’un milieu granulaire.. Agnes Duri, Nicolas Malterre, Guillaume Delaplace, Denis Cassan,
This project, called ATON-3D, aims to study the architectural policy of Akhenaton, both in Karnak and in Amarna, thanks to the tridimensional digital modelling
Actually, the fractal dimensionality d computed by the method described in the preceding section turns out to be less than or equal to DI (3). We have computed the
In order to assess modifications in the SG echostructure in patients with SSc and compare them with those of patients with pSS or controls with sicca symptoms, we
Figure 4: Velocities (top) and attenuation coe fficients (bottom) of the fast and slow waves, measured in a 50% solid fraction sample in the case of ultrasound propagation along
Figure 2b illustrates the rough optimal shape extracted, as a triangulation, from the result shown in Figure 2a where the non-design domain is in yellow, and the optimized
