I
I
1
1
I
I
I
I
I
I
I
I
1
1
I
1
1
I
I
I
DEDICACES
Je dédie ce modeste truvail à
Ma chère Mère ei à la mémoire de Mon cher et inoubliable père
Aucune déd}cœce ne serœit œçprimée à leurs juw§tes valeurs, mon prof iond
respect,etmagrœtitudepowtousleseÆf;ortsquevousœvezfioumispourmoï
À mgs ch`erQs sæurs et À mes chers f i`eres.
À mes deux grandes fiormilles, muternelle et paternelle.
À tous mes proches, mes amis, mes collègues de classes.
1
1
1
I
I
I
I
I
1
1
I
I
1
1
1
I
1
1
I
I
I
Je dédie ce trq[vail de mémotre
A ma Mère et à Mon père
Aucune dédicace ne seTait esq)rimée à lews justes voleurs, mon profiond
respect, et ma grutitude pour tous les effi)rts que vous q[vezfiournis pour moi.
À mes chères sœurs, À mes che" firères.
À mes deux grotndes fiœm«les, muiernelle ei pq[1ernelle.
À toew5 mes proches, mes amis, mes collègues de classes.
1
I
I
I
I
I
I
I
I
I
I
I
1
1
I
I
I
I
1
1
Remerciement
1
1
I
I
I
I
I
I
I
I
1
1
I
I
I
I
I
1
1
I
1
Tab]e des matières
Dédicaces...i
Remerciements...iii
Tab]e des matières ... iv
Liste des figures ... vi
lntroduction générale ... 01
Chapitre I
Robots sous-moriïis oulonomes
1.1. Introduction ... 031.2 Différents types d'engins sous-marins ... 03
1.2.1. Les poissons remorqués ... 03
1.2.2. Les véhicules té]é opérés ROV ... 03
1.2.2.1.dérinition...03
1.2.2.2. Les caractéristÉques des ROVs ... 03
1.2.3. Les véhicules avec lien acoustique UUV I.2.3.1.Dér]nition... 1.2.3.2. Lœ caractéristiques de ces engins [3) ... 1.2.4. Les véhicu]es sous-marins automnes AUV ... 1.2.4.1. Définition ... 04
... 04
1.2.4.2. I,œ AUVs gmi]ds fonds ... 05
1.2.4.3. Les AUVs côtiers ... 05
1.3. Dép]oiement de ]a robotique sous-marine ... 05
1.3.1. Le domaine civil ... 05
13.1.1. L'industrie [5] ... 07
13.1.2. L'environnement ... „ 07
\3.13. Les æpp\ÈœtÈons scàentÊti\qiiœ ... 07
1.3.2. Le domaine militaire ... 08
1.4. Contraintes et limitation des techniques actuelles ... 09
1.5. Modélisation du véhicule sous-marin autonome AUV ... 09
1.5.1. Introduction ... 09
1.5.2. Convention et hypothèses de base référentielle ... 09
1.5.3. Modèle cÉnématiqtie ... 11
I
I
I
I
I
I
1
1
1
1
I
I
I
I
I
I
I
I
I
I
Tab]e des matières
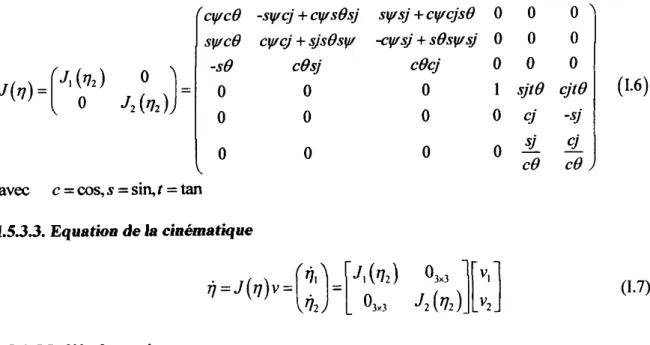
1.5.3.2. Ti.ansformation des vitesses de translation et de rotation ... 13
1,533, Eq.]atjon de Ja cjnématjque ,...,.,...,.,,...,....,.,...,...,., 14
1.5.4. Modèle dynamiqiie ... 14
1.5.5 Relation génémle de la dymmiq ue ... 14
1.5. Simulation en boucle ouverte du modèle dynamique ... 17
1.5.1. Commentaires sur les résultats de siinulation ... 19
1.6. Conclusion : ... 19
Chœpitre 11
Commandes par mode de glissemer.t et backstepping appliquées au robot
sous-marin
11.1. Introduction ... 2011.2. Commande SMC app]iquée à un robot sous-marin à supercavitation ... 20
11.2.1. Généralités sur la commande par mode de g]issement ... 20
11.2.2. Synthèse de la loÉ de commande ... 21
11.2.2.1. Choix de la surface de glissement ... 21
LI.2.2.2. Condition d'existence du mode de glissement ... 21
11.2.2.3. Conception de la loi de commande ... 22
11.2.3. Réticence (chattering) [10] ... 23
11.2.3.1. Solutions pour atténuer le phénomène de réticence ... 23
11.2.4. Synthèse d'une loj de commûnde pær mode g[Éssæiif poiir un robot sotis-marin25 n.2.4.1 Modèle mathématique d'un robot sous-marin à super cavitation ... 26
11.2.4.2. Synthèse des ]ois de commande pour ]e robot sous-marin ... 29
II.2.S. Résultats de simulation ...,...,... 31
11.2.5.1. Réduction du phénomène de chattering ... 33
11.2.5.2 Commentaires sur les résultats de simulation ... 34
11.2.5.3 Test de robustesse ... 35
11.3. Commande backstepping appliquée à un robot sous-marin à supercavitation ... 36
11.3.1. Généiülités sur la comimnde backstepping ... 36
11.3.2. Principe de ]a commande backstepping ... 36
11.3.3. Fonctions de Lyapunov [17] ... 37
1
I
I
1
1
1
I
1
1
1
I
1
1
I
I
I
1
1
1
I
I
Tab]e des matières
11.3.5. Commande backstepping appliquée au robot sous-marin ... 41
113.6. Synlhèse des Jojs de commande pour le robot sous-inarin ...,,.,,,...,.. „ 42
11.3.7. Résu]tat de simulation ... 46
11.3.7.1. Commentaires sur les résultits de simulation ... 48
11.3.7.2. Test de robustesse ... 48
11.4. Conclusion ... 50
Chœpitre 111
Commande linéaire adaptative appliquée à un robot sous-marin
111.1. Introduction ... 51111.2. La commmande adaptative ... 51
111.2.1. Classirication des systèmes de la commande adaptative ... 51
111.2.2. Principe de la commande adaptative ... 52
111.2.3. Les types de la commande adaptative ... 52
111.2.3.1. Commande adaptative indirecte ... 52
111.2.3.2. Commande adaptative directe ... 53
111.3. Conception de la commande linéaire adaptative pour le robot sous marin ... 54
111.3.1. Conception de loi de commande ... 57
111.4. Résultats de simulation ... 63
m.4.1. Commentaire sur les resultats ... 65
III.5. Conclusion ... 64
I
1
1
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Liste des Figures
Liste des figures
Figure A : Le premîer véhicule sous-marin autonome non habité ... 1
Figure 8 : Liaison à la surface des robots sous-marîns ... 2
Chapitre I
Robots Sous-marins Auwnomes
Figure 1.1 : Le véhjcule sous-mærin télé opériée H1000 de Js socié€é Ecæ-Hytec ... 3Figure 1.2: Le véhicu]e ALIVE de groupe Cybernétix ... 4
Figure 1.3 : Classirication des engins sous-marins ... 5
Figure 1.4 : Le K-Ster (France) à l'approche d'une mine de fond ... 6
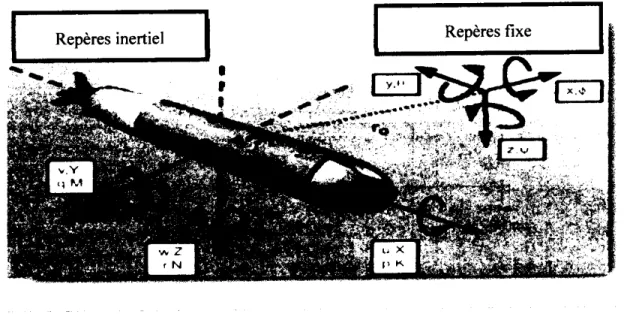
Figure 1.5 : Repère fixe et inertiel ... 10
Figure 1.6 : Schéma d'un solide indéformable lié à un repère terrestre et au repère fixe lié au corps ... 13
Figure 1.7 : Tmjectoire du Remus ... 16
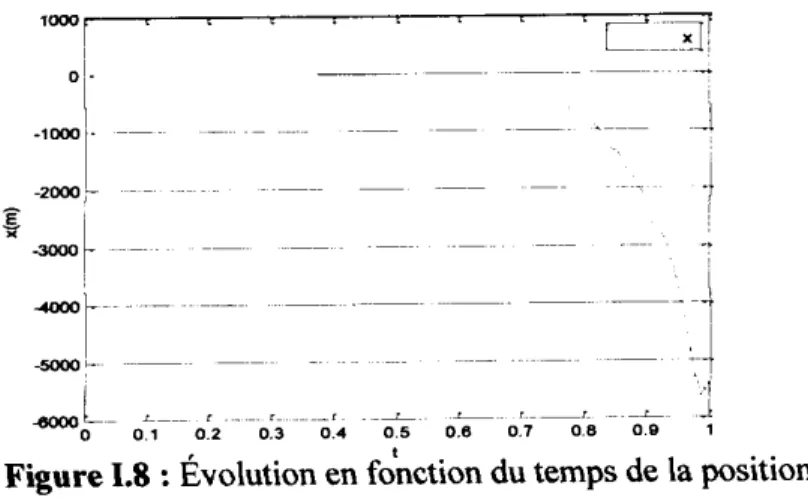
Figure 1.8 : Évolution en fonction du temps de la position jr ... 17
Figure 1.9 : Évolution en fonction du temps de la position ); ... 17
Figure 1.10 : ÉvoJutioD en foi)ctjon du temps de Ja positjon £7...,...,...,,... 17
Chœpitre 11
Commandes par mode de glissement et Backstepping œppliqués au robot
sous-marine
Figure 11.1 : Différents modes de convergence pour la trajectoire d'état ... 20Figure 11.2 : Méthode de commande par mode g]issant avec ]a commande équiva]ente 22 Figure 11.3 : Le phénomène de broutement ... 23
Figure 11.4 : Fonction saturation ... 24
Figure 11.5 : Fonction tangente hyperbolique ... 24
Figure 11.6 : Schéma représentant une torpil]e à supercavitation en mouvement ... 25 Vl[
I
I
I
I
1
1
I
I
I
I
1
1
I
I
1
1
1
I
I
I
I
Liste des Figures
Figure 11.7 : Schém de principe de mouvement longitudinal de robot sous-marin ... 26
Figure 11.8: Le mouvement suivant I'axe (z) ... 32
Figure 11.9 : L'ang]e de rotation ( C7 ) ... 32
Figure 11.10 : Les commandes appliquées au robot sous-marin ... 33
Figure 11.11 : Les surfaces de g]Îssement ... 33
Figure 11.12: Le mouvement suivant l'axe ( z ) avec la fonction sczf ... 33
Figure 11.13 : L'angle de rotation ( G) avec la fonction sŒ/ ... 34
Figure 11.14 : Les commandes appliquées au robot sous-marin avec la fonction sc7f . .. 34
Figure 11.15 : Les surfaces de glissement avec ]a fonction sc7f ... 34
Figure 11.16 : Le mouvement suivant I'axe ( z ) ... 35
Figure 11.17 : L'angle de rotation ( 0 ) ... 35
Figure 11.18 : Les commandes appliquées au robot sous-marin ... 36
Figure 11.19 : Les surfaces de g[issement avec la fonction sc7r ... 36
Figure 11.20 : Le mouvement suivant l'axe ( z ) ... 47
Figure 11.21 : L'angle de rotation ( 0 ) ... 47
Figure 11.22 : Les vitesses de robot sous-marin ... 47
Figure 11.23 : Les commandes app]iquées au robot sous-marin ... 48
Figure 11.24 : Le mouvement suivant l'axe ( z ) ... 48
Figure 11.25 : L'ang]e de rotation ( 0 ) ... 49
Figure 11.26 : Les vitesses de robot sous-marin ... 49
Figure 11.27 : Les commandes appliquées au robot sous-marin ... 49
Chœpifte 111
Commande linéaire adaptœtive uppliquée au robot sous-marin
Figure 111.1 : Schéma de la comimnde adaptative indirecte ... 53Figure 111.2 : Schéma de ]a commande adaptative directe ... 54
Figure HI.3 : Le mouvement suivant I'axe (z) ... 63
I
I
I
I
1
1
I
1
1
I
I
I
1
1
I
1
1
1
1
I
Liste des Figures
Figure 111.4 : L'angle de rotation ( 6)) ... 64
Figure 111.5 : Les commandes apptiquécs au robot sous-marin ... 64
Figure 111.6 : Les paramètres de la loi d'adaptation ®] ... 64
1
I
I
I
1
1
I
I
I
1
1
1
I
1
1
1
I
1
1
1
I
Introd uction Généra]e
Introdu ction généra]e
l.a marine a été la première à montrer un intérêt dans le développement des systèmes sous-marins non habités [1]. En 1866, la marine autrichieme demanda à Robot Whi-tehead de développer une nouvelle ame pou les navires de guerre. 11 démontra l'efficacité d'un système floimt propulsé à une vitesse de 3 m/s su une distance de 700 m mnsportant une charge explosive : la torpille était née. Cependant, cet engin n'avait aucun système de contrôle et de navigation. En réalité, les premiers véhicules sous-marins autonomes ont été développés à la fin des années 60-70 avec :
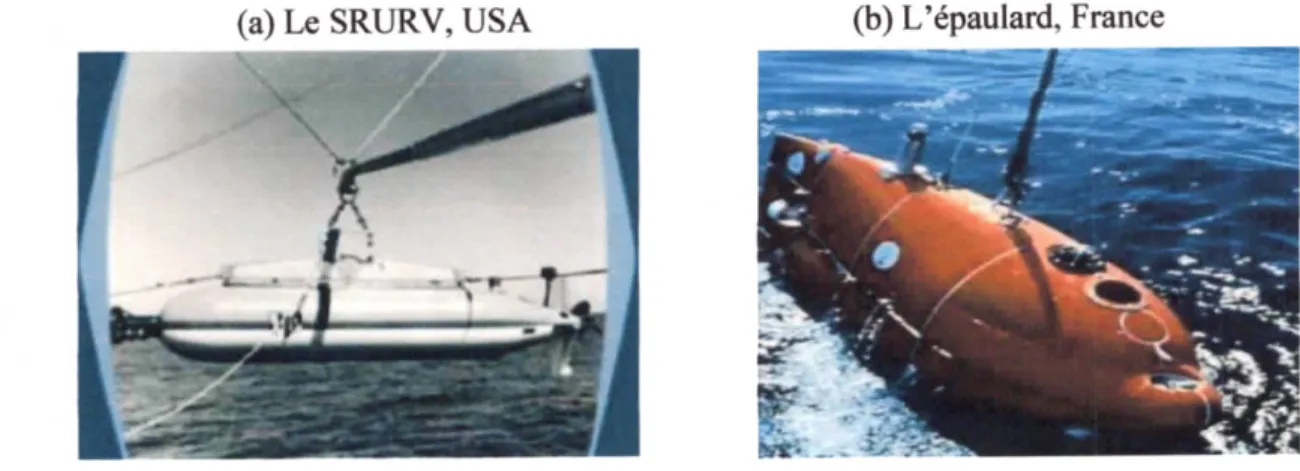
-Le SPURV (Self-propelled Underwater Research Vehicle, USA, 1977) : il pesait 480 Kg et pouvait opérer à me vitesse de 2.2 m/s pendant 5 heues jusqu'à une profondeu de 3000 m. Le véhicule était contrôlé æoustiquement de la surface.
Les chercheurs l'utilisaient pou faire des mesures de conductivité et de température pou faire la modélisation théorique des vagues (figuie A (a))
-L'épaulard Œrance, 1976) : il pesait 3 tonnes et pouvait opérer à me profondeu de 6000 m pendant 7 heues à une vitesse de 1 nœud 2.11 était également relié à la surface d'un point de vue acoustique (figure AŒ))
(a) Le SRURV, USA Œ) L'épaulard, France
Figure A : Le premier véhicule sous-marin autonome non habité.
Ces systèmes om été les précurseurs des quelque 2400 véhicules sous-marins non habités en activités régulières dans le monde entier. Pou cette clæse de véhicules sous-marins, c'est le type de liaison avec la surface qui va définir le degré d'autonomie du robot et nous pouvons distinguer trois catégories d'engins sous-marins :
1
I
1
1
I
1
1
I
I
1
1
I
1
1
I
1
1
I
I
I
IDtroduction Généra]e / Ceux relient par un lien acoustique/ Ies véhjci.Jes compJètement autoi]omcs.
Fîgure 8 : Liaison à la surface des robots sous-marins
L'objectif princjpa]e de ce davail de mémoire de fin d'études, est le déveJoppement d'une loi de commande linéaire adaptative pou un robot sous-marin.
Nous présentons, tout d'abord dams Le chapitre 1, un état de l'art des véhicules sous-marins autonomes et leurs applications. Nous étudions la dynamique en boucle ouverte d'un robot sous-marin afin de mettre en évidence la complexité de leus dynamiques et l'instabilité et le fort couplage qui les caractérisent en boucle ouvefte.
Le chapitre 2 est consacré à l'application de la commande par mode de glissement et la commande backstepping pou commander un robot sous marin à supercaviattion. Nous présentons dans ce chapitre les concepts de base de ces deux techniques de commande non linéaire. Premièrement, nous développons un contrôleu par mode de glissement afin de maitriser la profondeu et l'inclinaison de ce robot sous marin. Deuxièmement, nous synthétisons un contrôleu backstepping pou commander ce robot.
Dans le chapitre 3 nous détaillons la méthode de conception d'Lm contrôleu linéaire adaptatif pou ce robot. Nous commençons par la présentation de la fome de la commande linéaire ensuite nous synthétisons son mécanisme d'adaptation avec l'étude de la stabilité en boucle femée. Une étude en simulation des performances du contrôleu proposé est présentée à la fin de ce chapitre.
I
I
I
1
1
I
I
I
I
1
1
1
I
1
1
I
I
I
I
I
I
CHAPITRE I
1
I
1
1
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre 1 Robots Sous-Marins Autonomes
Robots Sous-marins Autonomes
1.1 Introduction
Nous présentons dans ce chapitre quelques notions introductives sur les systèmes sous-marins et en particulier les robots sous-sous-marins autonomes. Nous parlons de leurs classifications ainsi que leurs utilisations civiles et militaires. Nous présentons aussi dans ce
chapitre la modélisation cinématique et dynamique d'un robot sous-marin autonome. Afin de
mettre en avant, la forte non-linéarité, l'instabilité ainsi que le couplage qui caractérisent ce
système, nous présentons les résultats issus d'une étude en simulation du comportement en boucle ouverte d'un robot sous-marin autonome.
1.2 Différents types d 'engiDs soi)s-marins
On classifie généralement les robots sous-marins en fonction de la nature de leurs liaisons à la surface (voir l 'introduction générale-figure 8).
1.2.1 Les poissons remorqués
Les poissons remorqués ou « Towed Fishes » sont des engins non motorisés pouvant transporter un certain nombre de capteurs. Ces engins sont remorqués depuis la surface grâce
à un câble qui pemet par la même occasion de remonter les données acquises. Ils sont
principalement utilisés dans les opérations de cartographie, de reconnaissance du fond et pour
des relevés physico-chimiques en profondeur. La simplicité relative de leur mécanique ®as
d'organe articlé) leur permet de descendre facilement à de très grandes profondeurs. 1.2.2 Les véhicules télé opérés ROV
1.2.2.1 dérinition
Les véhicules ROVs (Remotely Operated Vehicles) sont généralement munis de bras
manipulateus et de caméras leur conférant des aptitudes à l'intervention. Ainsi ils peuvent effectuer des opérations complexes comme l'ouverture ou la fermeture de vannes, le changeant de pièces défectueuses sur des structures sous-marines, ou encore la récupération
d'échantillons ou d'objets immergés.
1.2.2.2 Les caractéristiques des ROVs
Les caractéristiques des ROVs [2] sont les suivantes :
I
1
1
I
I
I
I
I
I
1
1
I
I
I
1
1
I
I
I
I
I
Chapiùe 1 Robots Sous-Marins Autonomes
/ Ils sont capables de stationner en un point fixe.
/ L'oi7]bjJjcaJ reJje physjqüement J'engin à Ja suiface. Cecj permet de té]é opérer Je Robot et également de lui foumir de l'énergie. La présence de ce câble assure une récupération plus aisée du véhicule. Cependant, l'ombilical induit des perturbations importantes su le véhicule.
Nous pouvons citer, permis les nombreux ROVs existants, le Hlooo de la société Eca-Hytec. Ce véhicule a été conçu pou réaliser des inspections jusqu'à une profondeu de
1000 m. I1 peLit égæJement êûre mtinj de 2 bras mmÉpuJateürs. Ss v£tesse de déplœement peLit
atteindre les trois nœuds. Ia marine fimçaise utilise ce robot pou des interventions su des épaves de bateaux ou d'avion gisant sut le fond marin.
Figure 1.1 : Le véhicule sous-marin télé opérée Hlooo de la société Eca-Hytec 1.23 Lœ véhicu]es avec lien acoustique UUV
1.23.1 Dérmition
Les véhicules UUVs (Untethened Underwater Vehicles) sont conçus pou effectuer des opérations similaires à celles d'un ROV, avec m lien acoustique entre la surface et l'engin pennettant la vérification et l'échange des données. I.a conséquence est que l 'engin transport sa propre énergie et la manipulation est une tâche complexe qui demande un degré important d'autonomie. Ceci impose de garder l'opérateu dans la boucle de décision et de commande par I 'intemédiaire acoustique.
1.2.3.2 Les œmctéristiques de ces engins [3] Les caractéristiques de ces engins sont les suivantes :
/ Ils sont en général sur-actionnés.
/ Ils ont une gestion fme de leu consommation d'énergie.
/ Les délais de transmission dus au canal acoustique obligent le bateau de surface à se positionner audessus du véhicule sous-marin.
1
1
1
1
1
1
I
I
I
I
1
1
1
I
I
1
1
I
I
I
Chapitre 1 Robots Sous-Marins Autonomes
Alive est un exemple de véhicule avec lien acoustique. n mesure 4 m de long pou une JaTgeur de 2.2 m et tine hauteu de ].6m pou tin pojds de 3500 kg. Son autonomje est d'environ 7 heures .il dispose de 2 bms manipulateurs.
- = .,--`` ----,-, `.-=.`.
¥J-Figure 1.2: Le véhicule ALIVE de groupe Cybemétix 1.2.4 Les véhicules sous-marins automnes AUV
1.2.4.1 Dérmition
Les AUVs (Autonomous Underwater Vehicle) peuvent être défmis comme un engin connaissant sa position et naviguant vers un objectif. On établit une liste des opérations à réaliser et on les programme préalablement. Les opérateuis n'interviennent pas en fonctionnement nominal, l'engin est totalement autonome.
Ces véhicules pouvant être répertoriés en deux classes dépendant de la profondeur d'imersion. Nous parlerons alors d'AUVs côtiers et d'AUVs grands fond [4]. À partir de quelques centaines de mètres de profondeu, la structure, les dimensions, les caractéristiques des AUVs changent. Cette limite de profondeu va séparer les véhicules grands fonds des véhicules côtiers.
1.2.4.2 Les AUVs grands fonds
Ces engins conçus pou explorer les profondeus des océans ont, en général, une grande autonomie énergétique, un poids et des dimensions importantes qui nécessitent une logistique assez loude.
1.2.4.3 Les AUVs oôtieH
Ces véhicules sont réalisés avec l'objectif de réduire leu dimension, et par conséquent, la logistique nécessaire à leur mise en œuvre. Seules deux personnes suffisent pou mettre le robot à l'eau. Ils sont également modulaires du point de vue capteurs. Ces véhicules, totalement autonomes, sont capables de déteminer leu position absolue et de naviguer vers un objectif spécifié. Ils sont l'outil indispensable pou les missions en eaux peu profondes.
Chapitre 1 Robots Sous-Marins Autonomes
A. Les camctéristiqucs des AUVs côtiers
Les caractén.stiques des AUVS côtiers sont les suivantes :
/ Ils sont sous-actioimés. Ces véhicules possèdent moins d'actionneuis que de degrés de
liberté.
/ Ils ont une gestion fme de leu consommation d'énergie et sont totalement autonomes
du point de we opérateu.
V' Ils ont un axe de déplacement privilégie, selon la direction de leu propulseu.
Pou compléter notre état de l'art su les véhicules sous-marins, nous pouvons citer encore deux autres types d'enrins sous-marins autonomes :
/ Les planeuis sous-marins / Les systèmes biomimétiques.
Le schéma suivant représente globalement la classification des engins sous-marins
iT--˧`âFÈS#~;-'-^i--`---T``
Ë`l
E=ri=-1 -_+ ;,uï,w" p véhicules ' véhicules nm hal)ités ( habftéssoumarm
-,c
soubmcssil)les - '/`± Toufish ROV -.:UUV AUV
•UËÈ .__ _'! ïË~..,`__J qïEË_ __._J ïiËÏu
Fjgure 1.3 .. CJassjfication des engins sous-mar]'ns
AUV côtier
lnovcm
œæ¥`.± mt Ë=,
AUV côticr
1.3 Dép]oiement de la robotique sous-marine
Les applications des véhicules sous-marins sont potentiellement très vastes. Elles touchent en particulier deux principaux secteus qui sont :
/ Ire domaine civil. / Le domaine militaire.
Nous allons développer, dans les paragraphes suivants, les besoins de ces différentes activités. Nous allons également montrer que les robots sous-marins sont devenus des outils indispensables pou l'homme. lorsque ce demier doit intervenir dans un milieu dangereux.
1
1
I
I
I
1
1
1
1
I
I
1
1
1
I
I
I
1
1
1
Chapitre 1 Robots Sou-Marins Autonomes
13.1 Le domaine civil
On peut distinguer trois appJications princjpaJes pou Jes robots sous-man-ns : l'industrie, l'environnement et les applications scientifiques.
1.3.1.1 L'industrie [5]
Les compagiies pétrolières, gazières et de télécommunications ont très vite été intéressées par les potentialités des véhicules sous-marins. Leurs besoins s'expriment en temes de cartographie des fonds marins, d'aide à la pose de pipelines ou de câbles et I'inspection de ces structures. Les applications dans le domaine de I'énergie sont nombreuses, pami lesquelles :
/ Une meilleure connaissance de l'environnement marin local.
V' Une surveillance pemanente du volume marin autou des platefomes pétrolières pour s'assuer de l'absence de pollution (capteu d'hydrocari)ues).
/ Un relai acoustique entre fond et surface pou transmettre les domées de systèmes sous-marins déployés en eaux profondes.
Figure 1.4 .. Le K-Ster (Fr.ance) à l'approche d'une mine de fond 13.1.2 L'environnement
L'application des lois relatives aux restrictions de pêche ainsi que la protection de l'enviromement maritime requien la détection, l 'identification, la poursuite et l'interdiction des bateatK suspects. Ces robots pourraient également contribuer à identifier les pollutions intentiomelles (dégazages). Les ve'hicules sous-marins équipés de capteurs biochimiques sont capables d'analyser les pollumts et peuvent ainsi pemettre l'identification des responsables par comparaison chimique des cuves des navires amarrés au port. L'enan peut également prélever des échantillons de 8lace à différentes profondeurs pou étudier 1.historique du climat. Cetœ application demande au véhicule un positiomement relatif très précis, mais aussi des capacités à rester positionné en un point fixe en présence de perturbations fortes [6].
1
I
I
I
I
I
I
1
1
1
1
1
1
I
I
I
I
I
I
I
I
Chapitre 1 Robots Sous-Marins Autonomes
1.3.1.3 Les applications scientir]ques
Les archéologues profitent des caractén.stiques des engins sous-man-ns pour explorer les épaves et les trésors cachés sous les eaux des océans. Là où les capacités d'un plongeu sont limitées en termes d'autonomie et de profondeu d'immersion, les robots sous-marins repoussent les ffontières de 1'humain pou améliorer et étendre ses recherches. La
connaissance du débit et de la salinité des sources sous-marines, et de leur variation dans le
temps est importante. Ceci pemet au hydrologues d'estimer la quantité d'eau se déversant dans la mer, et d'évsluer s'il est possjble d 'uti]jser cette esu.
/ Cartographies des fonds marins.
/ Études océaniques : salinité, température, pression, bathymétrie, réflexion de la lumière, microbiologies sous-marine, faune, flore, capacité d' absorption du dioxyde de carbone, concentration des éléments chimiques, montée du niveau de la mer.
Pour des domaines de divertissements
/ Reconstitution des sites perdus ou imaginaires à l'aide de la réalité augmentée, comme
la cité légendaire Atlantide. / Visite virtuelle des sites protégés.
1.3.2 Le domaine militaire
Une des applications militaires les plus étudiées conceme la détection et la destruction de mines sous-marines. La destmction de ces objets est une tâche dangereuse et spécifique, où des engins robotisés peuvent perinettre de localiser et de neutraliser ces bombes à la place de
l'homme. Une autre activité en pleine émergence est la surveillance des ports.
Pou éviter l'intrusion de plongeurs ou encore des véhicules sous-marins ennemis dans les ports, des robots autonomes peuvent effectuer un quadrillage dans me zone proche de l'entrée du port.
En général les applications militaires s'expriment dans les tâches suivantes / Cartographies détaillées pou l'espionnage.
v' Détection et identification des mines sous-marines.
/ Détection et identification des navires, des bâtiments marins et dessous marins. / Protection des ports militaires et des environnements portuaires.
/ Écoute sonar passive (analyse du bruit émis par chaque cible).
I
1
1
I
I
1
1
I
1
1
I
I
1
1
I
I
1
1
I
I
Chapitre 1V' Écoute sonar active (analyse du coefficient de réflexion sonore de chaque cible).
/ Jnspection des coques de nsvjres et des sous+narins habjSés. 1.4 Contraîntes et [imitation des techniques actue]les
Les opérations en mer impliquLant l'homme sont très difficiles et couteuses à réaliser du fait
du niveau de sécuité à maintenir dans les milieux aqueux. L'absence d'oxygène d'une part et
les fortes pressions d'autre part réduisent les temps d'intervention des véhicules sous-marins
habités.
1.5 Modélisation du véhjcu[e sous-marin autonome AUV 1.5.1 lntroduction
Nous présentons ici la modélisation de la dynamique de véhicule sous-marin (la torpille)
REMUS Œemote Environemental Monitoring Units) [7], le fomaliste newtonien sera considéré dans les paragraphes suivants pour mettne en avant les différentes forces et moments mis en jeu, et l'impact de l'architecture sur la représentation du modèle. Les forces et les moments permettant d'établïr les six lois de mouvement de véhicule sont d'origines
diverses et variées. Elles seront décrites et détaillées au cours des prochains paragraphes de ce
chapitre, allant de la dynamique d'un corps indéfomable aux forces de propulsion en passant par les notions de masse ajoutée, des coefficients hydrodynamiques ou encore la force de gravité et poussée d 'Archimède.
1.5.2 Convention et hypothèses de base réfiérentie]le
La modélisation nécessite l'étape de définir des référentiels par rapport aux quels on
décrira l'évolution de l'engin, comme le montre la figure 1.5. On définit d'abord le repère fixe
Æe=(Oe>Xe9J'€,Zc),avec
Xc : Axe longitudinal confondu avec le nord géographique. J;c : Axe transversal orienté vers l'est.
Ze : Axe normal dïrigé vers Je bas (fond sous-marïn).
La caractéristique essentielle de ce repère est qu'il est fixe par rapport à la terre ce qui lui
confère les propriétés d'un repère galiléen, ou inertiel. L'effet de relation du globe terrestre est considéré comme négligeable au niveau de l'engin et de son voisinage. Un second repère
1
1
I
I
I
I
1
1
I
I
I
1
1
I
I
1
1
1
1
I
1
Chapitre 1 Robots Sous-Marins Autonomes
le repère de véhicule jib = (Cb,xb,yb,zb ) lié au véhicule permet d'exprimer les vitesses de
l'engin.
Les principaux axes d'inertie du véhicule co.i.ncident avec les axes du repère :
/ Xb Axe longitudinal orienté de l'arrière vers l'avant de l'engin.
v' }'6 : Axe transversal orienté vers tribord.
/ Zb : Axe normal dirigé vers le bas.
Le choix du point d'origine Cb de ce repère est stratégique. La SNAhŒ (Society of Naval Achitacts and Marine Engineers) propose une méthode pou choisir son emplacement en
fonction des caractéristiques géométriques de l 'engin [8].
Par exemple, si l'engin comporte des plans symétrie. Si le centre de gravité ou de flottabilité du véhicule appartient à cette intersection, le point d'origine est confondu avec l'un de ces deux points.
Le centre de gravité d'un corps correspond au barycentre des particules qui composent le
corps en question, chaque particule étant pondérée par son poids propre. On l'appelle aussi centre de masse.
Le centre de carène est défini comme étant le centre de volume d'une carène ®artie immergée de la coque d'un bateau), qui correspond au centre de gravité du volume d'eau
déplacée. On l'appelle aussi centre de volume.
On peut également parler de ceme de poussée en relation poussée d'Archimède. Par abus de langage, on dit également ceme de flottabilité au teme anglais centre of bruyancy.
On définit dans le repère terrestre la position du véhicule 7 = [7„ 72 r :
7, =[x y z]r: Les trois composantes de position 72 =[¢ 0 vr]7: Les trois composantes d'orientation.
72 est défini par : ¢ : L'angle de Roulis, 0 : L'angle de Tangage, y : L'angle de Lacet
Pour définir le vecteur de vitesse V de l'engin exprimé dansji6 , on adoptera la notation suivante : v =[v„v2]r , avec : v, =[w v w]7 , où w, v et wreprésentent les vitesses linéaires :
1
I
I
I
I
I
I
1
1
I
I
I
1
1
I
I
I
I
1
1
Chapitre 1W : vitesse d'avancement V : Vitesse de glissement, W : Vitesse de descente etv2 est défini Par
v2-[Pqrr
où p, q et r représentent les vitesses angulaires : p = ¢ : Vitesse de Roulis, q = Ô : Vitesse
de Tangage, r = P : Vitesse de lacet.
Finalement nous allons un vecteur des forces et moments r = [r„r2 ]7. appliqués au repère du véhicule : r, = [X y Z]7' : Les forces. r2 = [K A4 jv]' : Les moments.
La modélisation de robot est décrite en deux parties : le modèle cinématique, qui traite des
aspects géométriques du mouvement et le modèle dynamique, qui analyse l'effet des forces et des moments qui génèrent le mouvement.
Figure 1.5 : Repère fixe et inertiel.
1.5.3. Modèle cinématique
L'orientation est décrite par le vecteur 72 = [¢ 0 y]' , les angles sont définis comme suit
les trièdres Re = (Xc ,ye , Ze ) et Rb = (Xb ,}J6 ,Zb ) étant initialement confondus, on passe de Rc à ÆÔ par trois rotations successives
H
I
I
I
I
I
I
I
1
1
I
I
I
I
I
I
1
1
I
1
1
Chapitre 1 Robots Sous-Marins Autonomes
/ rotation y autou de Oz , angle de lacet (cap) / Rotation 0 autou de oy, mgle de tangage (assiette) / Rotation ¢ autou de 0#, angle de roulis (gite) 1.5.3.1. Défmition de h matrice de passage
l.a confimation de l'engin est au moyen de trois rotations élémentaires définies [8] par trois angles d'orientation à savoir le lacet y, le tangage 0 et le roulis ¢
Btxo,yozo ,®H,Btx,,y]Zo,GHBtxy,V,Z] ,®HjBtxy,Vv,Zr , t].], Où B(Jro,yo,Zo)est la base du repère global Re, B(.rv,yv,Z,) la base du repère local Æb,
B(-Y,,r,Zo) etB(Jrv,X,Z,) sont les bases intemédiaires et Hy,JJo et JJ4 les matrices de rotation orthogonale.
La première rotation d'angle de lacet y, est comptée positivement dans le sens direct par rapport à Zo.
Elle est représentée par Æy la matrice de pa§sage
dmslabase(X],ï,Zo)
La deuième rotation d'angle 0 écrit le tangage autou de l'axe r:, et donne la matrice de passage Æ'o entre les bases B(Jr,,Ï,Zo) etB(Jrv,ï,Z,) données par
J7
(
cosO 0 sin 010-sino 0 cos;`)
danslabase(Jrv,Ï,Z,)La troisième rotation d'angle de roulis ¢ s'effectue autou de l'axe Xv de la nouvelle base
domée par
00cos¢ -sin¢
stm¢ cOs¢ 12 danslabase(Xv,r,Z])I
I
I
1
1
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
Chapitre 1La matrice de rotation qui décrit la transformation entre le repère global Re et le repère local RÔ est donnée par
J\--Jl(q2)--HVHOH¢ Par conséquent,
J\(ï,2)=
cosO.cosy sino.sin¢.cosy -siny.cos¢ sino.cos¢.cosy +siny.sin¢ cosO.siny sino.sin¢.siny +cos¢.cosy sinc}.cos¢.siny -cosy.sin¢
-sin o cos O.sin ¢ cos O.cos¢
(1.2)
1.5.3.2. Transfo].mation des vitesses de tmns]ation et de rotation
À 1'aide de la matrice de passage de changement de base J[ (72), la transfomation des composantes des vitesses de translation, par rapport à Rc est domée par :
fil-J,(T,2)V, (1.3)
Œdésignepar/2=L/2(p2)lamatricedepassagereliantlescomposantesdesvitessederotation
dans le repère global à celle relative au repère local. Soit :
J2-"„2,-(;
0 -sino cos¢ stn¢cosO -stm¢ cos¢cÂ}so 1 sin¢tmo cos¢tano0 cos' -sin¢
s;m t ®os ¢ cos G cos O O±Z+Æ„ (1.4)Remarque 1.1 : il est à noter que la paramétrisation en tangage fait apparaître une singularité
é7 = £ + ÆÆ . Cette paramétrisation est inaccessible car grâce aux phénomènes hydrostatiques, 2
hydrodynamiques et la propulsion il impossible pour le sous-marin d'avoir un angle de tanga8e 90..
D'où la deuxième relation cinématique
Ù2=`2(72)V2
13
I
1
1
I
I
I
I
1
1
I
I
I
I
I
I
I
1
1
I
I
I
Chapitre 1 Robots Sous-Marins Autonomes
J(,l)---svcj +cvsosj svsj +cv/cjso cvcj+sùsgsyi €yisü+sOsvsü 00 cOc/. 0 0 0 avec c=cos,s=sin,/=tan 1.533. Equsitîon de k. cÊnémstique7 =„,V=t;:]=[J,O(3:32] ,2otx;2,m
(1.7) 1.5.4. Modèle dymmiqueLe robot sous-marin est considéré comme indéformable, ce qui signifie que sa structure
est rigide et que les coordonnées de son centne de gravité sont constantes dans son propre repère.
Dans la dynamique du corps rigide, les impacts des forces et des moments extérieurs sont
étudiés.
Figure 1.6 : Schéma d'un solide indéfomable lié à un repère terrestre et au repère fixe lié au
C0rps
1.5.5 Re]ation généra]e de ]a dymmique
Pour résumer, on peut écrire la relation générale de la dynamique :
I
1
1
I
I
I
I
1
1
1
I
I
I
I
I
I
I
I
1
1
Chapitre 1 M(ù)+c(v)v+D(v)v+g(7)=r„+r„ avec : h4 la matrice d'inertie M=A4',b + M,.neüoù : M,à et À4.„ sont respectivement déteminés par les relations (1.9) et (i.10).
\.,b_
0
0
0
-m(yGg + ZGr)m(xGq -W)
m(xG, + V) m(yGq + ZGr)-m(J,GP+W)
-m(zGP-V)
0
I yzq + I np + I zzr-1 yzr -I xyp + I yyq
00
00
00m();Gp+w) m(zGp-v)
-m(zGr+xGp) m(zGq+u)
m(}JGr-w) -m(xGp+J'Gq)-m(JGg-W)
m(zGr + xGp)-m(zGq + u)
-1 yzq -I xyp + I yyr
1 yzq + I xy p + I yyr
1 xyr + I xyq -I "p
m(xG-V)
-m(J,Gr -r)
m(xGP + yGq)
I xyp + I yzp -I yyq
- I J - I xyfl - I mp
0
(1.8)
(1.9)
(1.10)
C (v) : la matrice des forces de coriolis et centrifuges, définie par :
C(V)=Crb(V)+Ca(V)
où C,bet Ca(V) étant les matrices respectivement déteminées par les relations (1.11) et
(1.12).
I
I
I
I
1
1
1
I
I
I
I
I
I
I
I
I
I
1
1
1
rlChapitre 1 Robots Sous-Marins Autonomes
0
0
0
-m(yGq + ZGr) m(JCGg-W)m(J,G-V)
m(J'Gq + ZGr)-m(yGP+W)
-m(zGP-V)
0
Ï yzq + I xz P + I zzr-1 yzr -I ,yp + I yyq
00 00 00
00
00
00m(}'Gp+w) m(zGp-v)
-m(zGr+xGp) m(zGq+w)m(yGr-u) ~m(xGp+yGq)
-m(xGg -W)
m(zGr + xGp)-m(zGg + ")
-1 yzq -I xyp + I yyr
1 yzq + I xyp + I yyr
1 xyr + I xyq -I xxp 00
m(xG-V)
-m(J,Gr-r)
m(xGP + yGq)
I xyp + I yzp -I yyq
-1 ær -I xyq -I xxp
0
-(z".w+zqq) y,,v+y-, 0 Zhw+ Zqg 0 -X"" 0 -(y..v+y/) -Jr,," 0 0 -(z".w+z¢g) y,..v+ y,, 0 N,, -„`9 ZùW+Z4q 0 ~XùU -Nrr 0 KpP-(Y`.V + Yrr) X.,u 0 Mqq -K pP 0
D(v):lamatricedescoefficientsd'amortissementdéterminéeparlarelation(I.13)
g(7) : les efforts hydrostatiques donnés par :
16
(1.11)
I
I
I
I
I
1
1
I
1
1
1
I
1
1
1
1
I
I
1
1
Chapitre 1(w-B)sino
g(")=
-(W-B)cosostn¢
-(W7-B)CoSOCOS¢ (yGW-yBB)CoSoCoS¢+(zGW-zBB)cososin¢ (ZGW-ZBB)Sino+(XGW'-XBB)coS0cos¢ (XGW'-XBB)CoSosin¢+(yGW7-yBB)Sino q.14) rp:levecteudesforcesetdesmomentsdeportancedecorpsetdesgouvemes r„ : le vecteu des forces et des moments générés par les actionneurs du véhicule. 1.5. Simulation en bouc]e ouverte du modèle dynamiqueDms cette partie, nous présentons des simulations mmériques du modèle dynamique du robot sous-mrin en boucle ouverte ŒO). La position initiale du centre de gravité du
Remusest["z,¢,O,WVW,P#]'=[0,0,0,0,0,0,0,0,0,0,0,0]'.
Nous choisissons les forces et les moments comme suit [Jr,YZK,M,N]'=[1000,1000,1000,0,0,0]7.Onobtientlesrésultatssuivants: 500 0
"
-1000 _1500 -2000 200Figure 1.7 : Trajectoire du robot sous-marin Remus. La figue 1.7 présente la trajectoire du robot Remus en trois dimensions.
1
I
1
1
I
I
I
I
I
1
1
1
1
1
I
I
I
1
1
1
I
Chapitre 1 Robots Sous-Marins Autonomes
Figure 1.8 : Évolution en fotnction du temps de la position x La figure 1.8 représente le comportement du Remus selon l'axe X.
1ï---T-Ï--:i Lï,
1 .`:_-U'
m'- --
L_____J _ ) tFigure 1.9 : Évolution en fonction du temps de la position }J. La figure 1.9 représente le comportement du Remus selon l'axe Y .
-.'.-:_- _1"1- -,6tx,L-
-18ψ---TIT
T__T
_ ' __L__Tl_Tl
+1-1 0.4 05 'Figure 1.10 : Évolution en fonction du temps de la position z.
La figure 1.10 représente le comportement du Remus selon l'axe Z .
1
1
I
1
1
I
1
1
1
I
I
1
1
I
1
1
I
I
I
I
Chapitre 11.5.1. Commentaires sur les résu]tats de simulation
Dans les résultats obtenus, nous pouvons constater que le robot sous-marin est caractérisé par une dynamique instable en boucle ouverte et fortement couplée.
1.6. Conclusion :
Les robots sous-marins sont des systèmes qui attirent l'attention des chercheurs pou leurs
intérêts et leurs capacités remarquables. Ils peuvent travailler dans des conditions très
défavorables et difficiles pou l'être humain. Ces systèmes sont caractérisés par une
dynamique instable en boucle ouverte et ils nécessitent un système de commande assez
perfomant et auto adaptatif.
Dans ce qui suit, nous étudions la commande d'un robot sous marin autonome à super caviation. L'objectif sera de commander ce type de robot en profondeu et en inclinaison. Nous commençons dans le chapitre 2 par 1'application de deux technique de commande non
linéaire à savoir la commande par mode de glissement et la commande backtstepping et dans
le chapitre 3, nous developpons un controleur linéaire adaptatif pour commander ce robot, qui est l'objectif principal de ce travail de mémoire.
L
1
1
1
1
I
I
I
I
1
1
1
1
I
I
1
1
I
I
I
I
CHAPITRE 11
Commandes par mode de glissement
et backstepping appliquées au robot
1
1
1
1
I
I
1
1
1
1
1
I
1
1
I
I
1
1
I
I
Commandes par mode de glissement et backstepping appliquées
au robot sous-marin
11.1. Introduction
Dans ce chapitre, l'objectif est de synthétiser une loi de commande par mode de glissement et une loi de commande backstepping pou commander un robot sous-marin. Les perfomances de ces lois de commande ont été validées en simulation sur un modèle dynamique d'un robot sous-marin à supercavitation. L'objectif de commande de ce système est de maitriser sa profondeu et son inclinaison.
Premièrement, nous présentons des généralités sur la commande p" mode de glissement, ensuite nous développons une loi de commande robuste à base de cette théorie pour forcer le robot sous-marin de suivre des trajectoires désirées.
Deuxièmement, nous domerons un aperçu sur la technique de commande récursive backstepping, ensuite nous synthétisons une loi de commande backstepping pour commander
le robot sous-marin.
11.2. Commande SMC appliquée à un robot sous-marin à supercavitation 11.2.1. Génémlités sur la commande par mode de glissement
La commande par mode glissant d'ordre 1 SMC (Sliding Mode Control) est une commande à structure variable pouvant changer de structure et commutant entre deux valeurs suivant une logique de commutation bien spécifique s (x) .
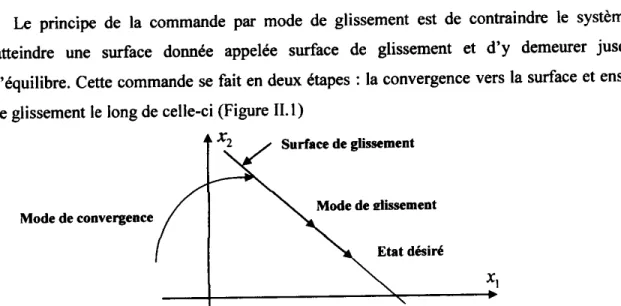
Le principe de la commande par mode de glissement est de contraindre le système à atteindre une surface domée appelée surface de glissement et d'y demeuer jusqu'à l'équilibre. Cette commande se fait en deux étapes : la convergence vers la surface et ensuite
le glissement le long de celle-ci (Figure 11.1)
Mode de convergence
Figure 11.1 .. Différents modes de convergence pour ls tmjectoire d'état.
1
I
1
1
I
I
1
1
I
1
1
I
I
1
1
I
1
1
I
1
1
Chapitre 11 Commandes Par mode de glissementet backstepping appliquéesau robot sous-marin
11.2.2. Synthèse de la loi de commande
La synthèse de la commande par modes glissants se fait en trois étapes / Choix de la surface de glissement ;
/ Etablir la condition de convergence ;
V' DéterminŒ la loi de ccrmmande q`ri pemet d'atteindre la surface et d'y demeuer. 11.2.2.1. Choix de la surface de glissement
Soit le système décrit par l'équation différentielle suivante (11.1 )
J" =/(X,,)+g(X,,)" (11.1)
où / et g sont des fonctions non linéaires, g est supposée inversible, w : l'entrée du système
et x : l'état du système.
Soit xd la consigne désirée et c l'erreur de poursuite définie par
e -x-xd (11.2)
La fomule générale de la surface de glissement est définie en fonction de l'ordre du système
comme suit [9]
s(x) =(€+Â)n-` eo (ii.3)
où nl le degré relatif du système par rapport à la sortie y(/).11 représente le nombre
minimum de fois qu'il faut dériver la sortie }J(/) par rapport au temps pour y voir apparaître
l'entrée.
11.2.2.2. Condition d'existence du mode de g]issement
Le choix de la fonction de glissement étant fait, la deuxième étape consiste à concevoir une
loi de commande qui puisse amener le vecteur d'état à converger vers la surface et y demeurer
(S = 0) . Pour cela, il faut que la loi de commande soit conçue de telle manière à ce que S soit attractive.
Pou déteminer la condition d'attractivité, considérons la fonction de lyapunov suivante v,s,=is2
Uiw condit;on nécess8}re et suf Fiisante, 8ppelée condition d'attraÈctiv;té, pour qu'une variaLble de glissement £(x,/) tende vers 0 est que la dérivée temporelle de v soit définie négative
jJS<0 (11. 4)
Si la condition (11.4) est vérifiée, alors la variable de glissement et sa dérivée sont de signe contraire quel que soit le temps et que 0 est un centre attracteur pour s .
I
1
1
I
I
1
1
I
I
I
I
I
1
1
I
I
I
I
1
1
Chapitre 11 Commandes Par mode de glissement et backstepping
Le temps de convergence, ou le temps d'atteinte « reaching time » /, dépend directement du
choix de S .
Pour une convergence en temps fini, la condition (11.4) qui ne garantit qu'une convergence
asymptotique vers la surface de glissement est remplacée par une condition plus restrictive
dite de T`-attractivité et donnée par [9]
jJS;-„l.ç' , „=0 (11.5)
11.2.2.3. Conception de la loi de commande
Nous présentons dans ce qui suit une méthode de synthèse des lois de commande par mode
de glissement basée su le calcul de la commande équivalente et l'ajout d'un teme discontinu. La commande équivalente est une fonction continue qui sert à maintenir la variable à
contrôler sur la surface de glissement {s=0}. Elle est obtenue grâce aux conditions
d'invariance de la surface
s=0
(11.6) j=O
où zfeq est déduite de la relation L¢ = o .
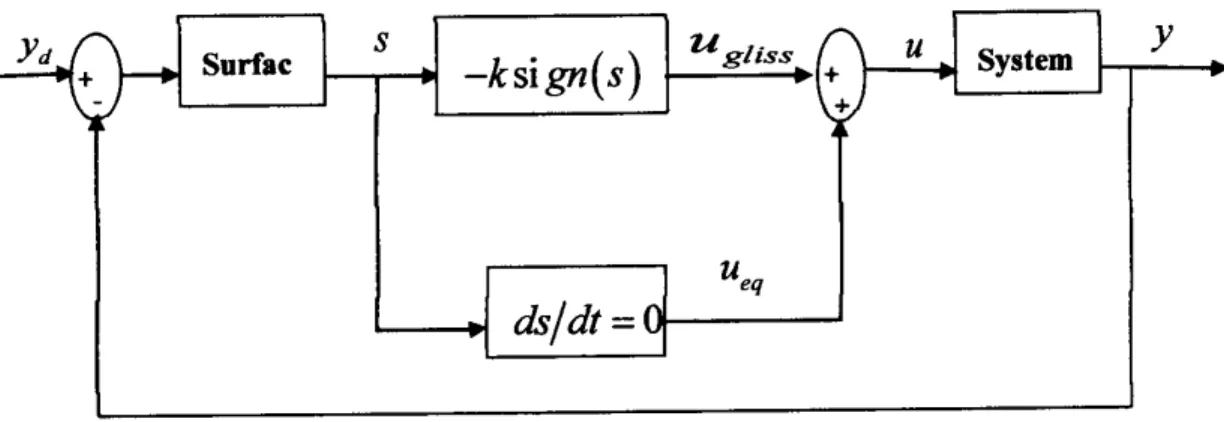
Physiquement ]a commande équjvalente présente ]a valeur moyenrie de la commande w . Cependant, cette commande ne force pas les trajectoires du système à converger vers la surface de glissement. Ainsi, la commande w est la somme de la commande équivalente et d'une composante discontinue (figure 11.3) assurant me convergence et un régime glissant.
w=wgks+wcq avec wd,ff =-klsJ.g7i(s) (ii.7)
Æ est une constante positive, si.g7i est la fonction signe et wc est la commande discontinue.
Figure 11.2 : Méthode de commande par mode glissant avec la commande équivalente.
I
1
1
I
I
I
1
1
I
I
I
I
I
1
1
I
I
I
I
I
I
Chapitre 11 Commandes Par mode de glissement et backstepping appliquées aurobot sous-marin
11.23. Réticence (chattering)
Urn régime glissant idéal requiert une commande pouvant commuter à une fréquence
infinie. Ainsi, durant le régime glissant, les discontinuités appliquées à la commande peuvent entraîner un phénomène de broutement, appelé réticence ou "chattering" en anglais. Celui-ci
se caractérise par de fortes oscillations des trajectoires du système autour de la surface de
glissement (figure 11.3). Les principales raisons à l'origine de ce phénomène sont les limitations des actionneurs ou les retards de commutation au niveau de la commande. Ces
commutûtÉons détérioiient Jû précjs;on de Jû oomrmnde et peuvent s'8vércr néfastes pou 1'organe de commande en provoquant une détérioration prématurée des systèmes mécaniques et une élévation de température dans les systèmes électriques ®erte d'énergie non
négligeable).
"jecti
/
Figure 11.3 : Le phénomène de broutement.
H.23.l. So]utions pour atténuer ]e phénomène de réticence
Dans le but de réduire ou d'éliminer ce phénomène, de nombreuses solutions ont été
proposées, comme la solution de couche limite, la commande hybride floue-glissante, mode glissant d'ordre supérieur [ 1 1 ]
A. So]ution de coüche [imite
Cette solution, connue aussi sous le nom de "boundary layer solution". consiste à
remplacer la fonction signe par une approximation continue, de type grand gain, uniquement dans un voisinage de la surface, Parini les fonctions utilisées nous citerons la fonction de
saturation [ 1 2]
1
1
I
I
I
1
1
I
I
I
1
1
I
I
I
I
I
I
I
I
Chapitre 11 Commandes Par mode de glissement et backsteppingappliquées au robot sous-marin
sa,(s)-
: Jjl:lsI
s,.g7,(S, S,l:l =l€ : Largeur du seuil de la fonction de saturation.
-_Ô
+_J
Figure 11.4 : Fonction de saturation
D'autres fonctions existent telles que les fonctions, tanh (s / €) , 2Æarctan(s / €) ....
(11.8)
Figure 11.5 : Fonction tangente hyperbolique
Le système ne converge plus vers la valeur désirée, mais vers un voisinage de cette
demière dans ce cas, le système est dit en régime pseudo-glissant. Bien que cela pemette d'atténuer le phénomène de réticence, la précision par rapport à l'objectif fixée, la robustesse de la commande et le temps de réponse s'en trouvent dépréciés.
Cette méthode est paramétrée par une constante positive € réglée pour avoir un bon compromis entre réduction du chaftering et conservation de la robustesse.
8. SoLution par des lois d'approche
Par ailleurs, une approche intéressante consiste à concevoir des lois de convergence non linéaires qui pemettent une adaptation dynamique d'une composante de la commande en
I
I
I
I
I
I
I
I
I
1
1
I
I
1
1
I
I
I
I
1
1
Chpitre ll ComnmÉ par mode de glissemcdt ct boclÉstepping sppllquéœ ûu robd sousmarin fonction de la variation de la fonction de glissement. Ainsi, plus le vecteu d'état est loin de la suiface de gJjssemen£ plus cetie œmposante est g]ande et œnd à mmener Je vecteur vers la surface, et inversement. Par conséquent, il est théoriquement possible de réduire les commutations haute fféquence en réSme établi, sans toutefois affecter le temps de convergence ni même l'erreu de poursuite du système. Gao et Hung ont proposé notamment deux lois d'atteinte possibles pou réduire les commutations. La première loi d'atteinte contient m terme proportiomel à la fonction de glissement qui pemet au système d'atteindre plus rapidement la surface de glissement lorsque celui-ci en est éloigné. De plus, le teme proportiomel allège le travail de la partie discontinue sz.g77(s) et pemet par conséquent une réduction des commutations su la commande.
Cette loi d'atteinte est donnée par
j = -Æj,.877 (S) -gLr ai.9) Dans la deuxième loi de convergence figure une puissance fi.actiomaire de la fonction de glissement qui multiplie le signe de celle-ci. comme suit
j = -Æ lsl' s,.g7'(S) (11.10)
0ù p est un réel strictement compris entre 0 et 1. 11 est par ailleuis démontré par Gao et Hung que la loi de convergence (11.10) engendre un temps d'atteinte fini de la surface de glissement. 11.2.4. Synthèse d'une [oi de commande par mode glissant pour un robot sous-marin
Daiis ce travail du mémoire nous avons opté pou travailler su un robot sous-marin à supercavitation. L'objectif de commande pou ce robot sous-marin autonome est de maitriser sa profondeur ainsi que son angle d'inclinaison.
La supercavitation est une technique de propulsion sous-marine pemettant à un objet Ousqu.àprésentdestorpines)degénérerungazchaud.assezchaudmêmevaporiser1.eau,qui enveloppera la torpille afin de réduire le fiiottement de l'eau. I.e ffotiement de l'eau est environ 1000 fois plus grande que dans un gaz comme de la vapeu d'eau.
FÉgup 11.6. Schéma tt;présentant une torpiJle à supercavÉtation en moLivement
I
1
1
I
I
I
I
I
I
1
1
I
I
I
I
I
I
1
1
I
ChBpitrc n Commndes pq mode de glisstmedt ct backstcpping oppliquéÉs _q! rotx* 8ou-m+p. 11.2.4.1 Modèle mathématique d'un robot sous-marin à super cævitation
Nous présentons dans cetùe partie une description générale de ce type de robot sous-marin qui trouve son utilité aussi bien dans le domaine militaire que dans le domaine civil.
Un schéma illustratif du mouvement longitudinal de véhicule est montré su la figure 11.7.
\` ...-.---. : .--. ;'-11.. ' , .
Figure H.7. Schéma de principe de mouvement longitudinal de robot sous-marin. avec £ est la longueu de véhicule. Les quatre états de modèle sont la profondeuz , la vitesse verticale du coips w , l'angle de tangage 0 et la vitesse d'inclinaison g . Le système comporte deux entiées de contrôle, l'angle de déviation du cavitateu Ôc et l'angle de déviation de l'élévateu Ôc . La vitesse du ceme de corps y est supposée constante, le moment de l'inertie est /„ , o le nombre de cavitation, M la masse de véhicule. Nous avons aussi [13]
M=3(mp¢)R2H=Ë(mpÆ)Æ4£+(wÆ)R2£3etxg=-Ë£.
La matrice d'inertie est donnée par
[,]-[_#g _;g]
¢1.11)Supposant que le coefficient de traînée de cavitateu est modelé par C, =Cro(1+o) où C„=0.82[12],laforcedeportancesulecavitateurestapproximéepar
Fm=±ÆPÆ2jzyzq¢c=C/¢c.
26
I
I
1
1
I
I
I
1
1
I
1
1
I
1
1
I
I
I
1
1
I
Chapitre 11 Commandes Par mode de glissement et bækstepping appliquées au robot sous-marin Dans l'équation ci-dessus, crc dénote l'angle d'attaque dû à la déviation de cavitator Ôc et à la vjtesse vertjcale de coips. Toute la force verticale agi.ssant sur la surfàce de control
équivalente fixée à la queue du véhicule est modelée par rapport à la force de cavitateur par
[14]
Ffin---nciaf.
Œc=;+Ôf
Œ/-Ë+#+Ôc.
Les deux temes Œc et C¥/ sont donnés par
(11.13)
(11.14) (11.15)
La dynamique globale du robot sous-marin est gouvemée par le système d'équation non
linéaire suivant [ 11 ] 717£ 936 17£ 1|JZ2 i33£2
-+
36 60 405cy2
-„1ri Tffi)
+Fg-+Fp,a"Le constant C'=1/2C.42 avec Æ, = q /R . Après la nomalisation par (ÆpmÆ2£), la force et le moment dû à la pesanteur sont simplement exprimés comme suit [13]
F„ = [L77£//936]g (11.17) avec g est l'accélération de la pesanteur. La force FPÀ" ®lanning force) est domée par [13]
Fp,m=_y2[L/](/m„£)](i_(R./(mR.))2)(#)Œ (ii i8)
La notation Ji'=(Jtc -Jt)/R représente la différence nomalisée entre le diamètre de la
cavité et le diamètre de corps. Dans l'équation précédente, le terme Æ ' est donné par [15]
I
I
I
I
I
1
1
1
1
I
I
1
1
I
1
1
I
I
I
I
Chapitre 11 Commandes Par mode de glissement etbacksteppi ng appl iquéesau robot sous-marin
0 (Rc -R)| R>(L| R)w|V
(L| RJMV|-R: (Rc -R)| R<_(L|R)w|V
De plus, l'angle d'attaque est donné comme suit
Œw/v-Âc/v w|v >o
w|v+Èc|v w|v<_o
Æ,=±(=)-t-,
Æ2=(l-(1-Î=)4("`'7))"
Les deux temes Rc, et Àc. sont donnés par
Æc=R„(082¥)"Æ2
:(o.829)"y(,-Î=)
(Æ2(¥-3))
(11.19) (11.20) (11.21) (11.22) (11.23)L'équation de la forme de la cavité présentée ici n'est valable que si la contrainte suivante
sur la longueu est satisfaite
£ > Æ„ (ÏZ-3) (11.24)
à partir de la rçprésentation d'état de (11.16), avec Ô = q et 2 = w-yo , et avec le choix des
variables d'états suivant : x, =z, x2 =w, x3 =0 et x4 =g, le modèle mathématique du
mouvement longitudinal du véhicule peut être montré comme suivant
*1 = Jr2 - yJ,3 *2 = / (Jr) + g„ (Jr)w| + g|2 (x)w2 jr3 = Jr4 *4 = /2 (x) + g2| (x)w| + g22 (Jr)w2 28 avec (11.25)
I
1
1
1
I
1
1
1
1
1
1
I
1
1
I
I
1
1
I
I
I
Chapitre 11 Commandes Par mode de glissementet backstepping appliquées au robot sous -marin
F,X,-[#)]-r-`
G(Jr)-(,-") -"
TftT
-n -nL
mm g„(Jr) g'2(X g2,(Jr) g..(Jr)r-'
36 llR2 133£2 + 60 405 +Fgrav+Fdan£ -,'1ri ïri
(11.26) (11.27) (11.28)Où,r=[x[,x2,x3,x4]r € R4 , est le vecteu d'état complet ; ce vecteu d'état est supposé mesurable, w =[w„w2r = [Ôc,Ôc]' € R2 est l'entrée de commande, y = [yw]r € R2est le
vecteur de sortie avec }1, = X, et };2 = X3 .
11.2.4.2. Synthèse des lois de commande pour ]e robot sous-marin
Dans cette section, une structure de commande pou le robot sous-marin basée su la commande par mode de glissement. Ici notne objectif est la commande en profondeur du robot sous-marin suivant 1'axe z , ainsi que la commande en rotation auteu de l'axe )/ (tangage 9).
/ Commande en profondeur
Pou la commande de profondeur, suivant l'axe z , avec la technique de commande par mode de glissement, la loi de commande est constituée de deux partie : la commande
équivalente et le teme de correction. A partir du modèle du système (11. 23), la dynamique du
système suivant l'axe Z est donnée par
-/ (Jr) + g" (Jr)", + g,2 (X)"2
=J,
(11.29)
pour le sous-système (11.29), le degré relative est r, =2, pour cela nous choisissons la
surface de glissement comme suit
S' = é, + 4e,
29
I
1
1
I
1
1
1
I
1
1
I
I
1
1
I
1
1
I
I
I
Chapitre 11 Commandes Par mode de glissementet backstepping appliquées au robot sous-marin
avec 4 > 0, et = z -Zd, l'erreu entre z du robot sous-marin et celle désirée.
En utiJfsant la théorie de Ja commande par mode de glissement Ja Joi de commande est
donnée par
", - "leq + "1g,4SS
avec %]g„œ est le teme de conection défini par
"ighff = -q5'.8"(Si ). 4 ' ° et%,qiacommandeequIva[enœca[CU]ee[°{ït;:e:
on dérive la surface §, par rapport au temps, on trouve
é, = ë, + À,é,
À partir de (11.33) et (11.34), on obtient
j, = 0 O ë, + 4é, = 0
0n remplace é, et ë., par ses relations dans (11.19), on trouve
*2+rï3-ï,4+4(Jf2+yJr3-*W)=o
En utilisant (11.25) et (11.36) devient
/(X)+8H(X)"iaq+gi2(X)"2é7+yx4-ïi4+4(X2+yx3-Xw)=° La commande #,q est calculée dans (11.48).
(11.31) (11.32) (11.33) (11.34) (11.35) (11.36) (11.37)
/ Commande de l'angle de tangage 6)
Pour la commande de rotation suivant 1'angle 0 avec la technique de commande par mode de glissement, la dynamique du robot sous-marin selon cette angle est donnée par
t;;2
=J¥4
=/2(x)+g2|(Jr)#|+g22(x)#2 (11.38)
pour le sous-système (11.38), le degré relative est r2 =2, pour cela nous choisissons la surface de glissement comme suit
s2 = é2 + A2C2 (11.39)
avec Â2 > 0, e2 =é?-Od, ]'emur entre l'angle 0 du robot sous-marin et ce]le dés;rée. En utilisant la théorie de la commande par mode de glissement la loi de commande est
domée par :
I
I
I
I
1
1
1
I
1
1
I
1
1
I
1
1
I
I
I
I
I
Chapitre 11 Commandes Par mode de glissement et backstepping appliquéesau robot sous-marin
U2 =U2eq +U2diss
avec #2g„s§ est le teme de correction défini par
U2gi,st-~-k2Sign(S2),k2>O
etw2+acommmdeequivalentecalculeei;}::
on dérive la surface s2 par rapport au temps, en trouve
j2 = ë.2 + 4é2 à partir de (11.42) et (11.43), on obtient
j2 = 0 0 ë.2 + A2é2 = 0 en remplace é2 et ë.2 par ses relation dans (11.44), on trouve
*4-ï3d+À2(X4-*3/)=° en utilisant (11.38) et (11.45) devient /2(x)+g2`(x)#`eq+g22(Jr)w2Cq-Ï3d+A2(x4-x3d)=o (11.40) (11.41) (11.42) (11.43) (11.44) (11.45) (11.46)
A partir des équations (11.37) et (11.46), la commande équivalente est domée par
„CV=[#4]=G-ttx,(rï;=£{::±ïÏ:,-X,d)]_[7:t:;]) tL]47,
Finalement, la commande %] et la commande C/2 qui assurent la commande de Z la
commande de 0 sont données comme suit
"i=%icq-Æis7.8»(Si)
U2--U2eq-k2Sign(S2)
(11.48)
11.2.5. Résultats de simu]ation
Dans cette section, on va présenter les résultats de simulation issus de l'application de la
structure de la commande par mode de glissement, vue précédemment sur le robot
sous-marin, les figures 11.8-11.11 représente l'évolution des signaux caractérisant le système en
fonction du temps, à savoir : l'erreu, les sorties, les sorties désirée sainsi que les commandes
appliquées au système. Ceci afin d'atteindre le point final de coordonnées [zd,C7d] , telle
que
I
1
1
1
I
1
1
I
I
I
I
I
I
Chapitre ll Commndes par mo4ç de glissement et backstepping æpliquées au robot sous-marin
Zd =-50 m, Od --O.L rad
avecl'étatinitiaieJr=[_3,o,o.oi,o]7.
Remarque n.l : Pour assurer la continuité du mouvement du robot sous-marin, nous avons utilisé des variables de référence filtrées, donc zd et Od sont filtrés avec 2 filtres d'ordre deux.
Pou résoudre les équations différentielles, nous avons utilisé l'algorithme de Runge-Kutta d'ordre 4 avec un pas de simulation Ar = 0.001 sec, et un temps fmal f/ = 20 sec.
11 est à noter que cette simulation a été réalisée avec les paramètres de simulation suivants
4 =2. 4 =15et 4 =Æ2 =0.1.
`-____
2 . 0 8 10 12 1. 10 18 20 TaTP (8œl 2 . 0 8 10 12 1. 10 18 20 Tap [8œlFigure 11.8 : Le mouvement suivant l'axe (z).
2 . 0 8 10 12 1. 1® 18 20 T_po lsœl
2 4 e e 10 12 14 1e le 20
Tm (pc]
Figure 11.9 : L'angle de rotation ( 6) ).
Chapitre ll Commande.s par mode de glissement et backstepping appliquées au robot sous-marin
2 . ® 8 10 12 1. 16 1® 20 Tonq (sœl
2 . ô e 10 12 1. 1e le 20 Tqp [6œ)
Figure IL10 : Les surfaces de glissement
1
I
1
1
I
I
I
I
I
I
I
I
2 . e o 1o 12 1. 1e 18 æ Teflp [sœ] 2 . e o lo f2 1. 1e 18 2o Tenp Ûœ'Figure 11.11 : Les commandes appliquées au robot sous-marin. 11.2.5.1 Réduction du phénomène de chattering
D'après les résultats précédents, on remarque que les commmdes effectives sont caractérisées par des commutations très rapides (figure 11.11), ce qui influe su le comportement du système. Donc, pour sumonter le problème du chattering, on va utiliser la fonction sczf au lieu de la fonction sz.g7? , dans chaque terme de comection. Les résultats de simulation sont montrés cidessous
2 4 Û 0 10 12 1. 18 10 20 TÜTIJe (8œ)
2 . 0 e 10 12 1. 1e 18 20 Tamœ loœl
Figure 11.12: Le mouvement suivant 1'axe ( z ) avec la fonction sczf .
1
1
I
1
1
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre 11 Commandes PaD. mode de glissement et backstepping appliquées au robotsous-marin
oL
T- 18oC'
1 , J_ , _ , -_-_____J
2 4 6 8 10 12 14 16 18 20 TemFB [Bec]
Figure 11.13 : L'angle de rotation ( 0 ) avec la fonction sczJ .
0- 001J).02
-::oL-J`
Temps lsœ) 0 005 - 0-o,N Ê ooo5-J ooo5- J)olJ) 015 J)_02-ooæ!--i
' ' -' , _ 1 , 6 0 10 12 14 18 Tonlœ [Sœ)Figure 11.14 : Les surfaces de glissement avec la fonction scrf . i_ï_tm\
.J
8 8 10 12 14 16 18 20T- 18oC1
Figure 11.15 : Les commandes appliquées au robot sous-marin avec la fonction scz/ .
11.2.5.2 Commentaires sur les résultats de simulation
En se référant aux résultats de simulation montrés sur les figues 11.8 et 11.9, on en conclut
qu'on a me pousuite de trajectoire satisfaisante avec des erreurs et des temps de réponse
acceptables. Cependant,1'allue temporelle des commandes montrées sur la figure 11.11,
illustre bien que ces commandes sont de hautes ffiquences, ce qui peut exciter la
![Figure 1.1 : Le véhicule sous-marin télé opérée Hlooo de la société Eca-Hytec 1.23 Lœ véhicu]es avec lien acoustique UUV](https://thumb-eu.123doks.com/thumbv2/123doknet/14530483.723464/15.891.237.642.439.589/figure-véhicule-télé-opérée-hlooo-société-véhicu-acoustique.webp)