An optimal control approach to ciliary locomotion
Texte intégral
Figure

Documents relatifs
Specimens (swab samples [swab], punch biopsy tissue specimens [tissue-punch], and surgically excised tissue specimens [tissue-surgery]) obtained from 384 patients with suspected
We will show that the solutions of the optimal control problem corresponding to costs in L depend continuously on the one hand on the initial and final points (stability), and on
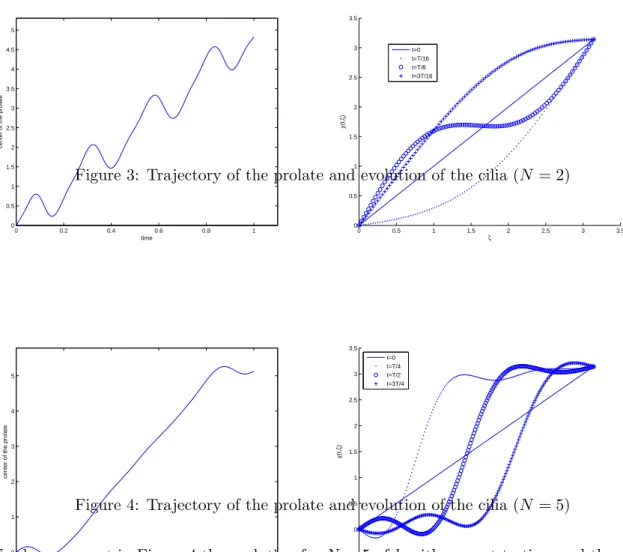
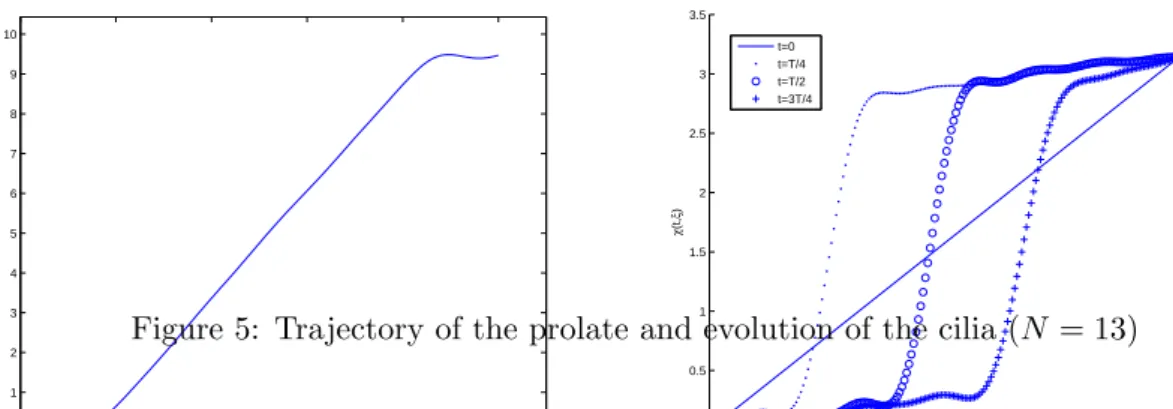
By a qualitative analysis of these optimal control problems we are able to detect an asymptotic behaviour of the shape of the corre- sponding optimal trajectories, in case the
The maximum principle is used to compute periodic controls candidates as minimizing controls and is a decisive tool combined with appropriate numerical simulations using
Abstract— We present a theory of singular arc, and the corresponding second order necessary and sufficient conditions, for the optimal control of a semilinear parabolic equation
This method can not reproduce the organisation of cold clouds as crystals but it allows one to scale the size of large samples with the trapping parameters and the number of
properties: For the corrosion pit area and volume populations, a multi-covariate Weibull distribution was selected, where the scale parameter (of the Weibull equation) is a function
Observed average number of linguistic expressions per participant for the mixed co-speech gestures (accurate in an egocentric and geocentric way) as a function of the
