Design, Prototyping, and Testing of an Apparatus for Establishing a
Linear Temperature Gradient in Experimental Fish Tanks
by
M
Romi Sinclair Kadri
Submitted to the
Department of Mechanical Engineering
in Partial Fulfillment of the Requirements for the Degree of
ASSACHUSETTS INSTITUTE OF TECHNOLOGY
AUG
15
20
LIBRARIES
Bachelor of Science At theMassachusetts Institute of Technology June 2014
Q 2014 Romi Sinclair Kadri
All rights reserved
The author hereby grants to MIT permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part
in any medium now known or hereafter created.
Signature of Author:
Signature redacted
7,
Certified by:
partment of Mechanical Engineering February 5, 2014
Signature redacted
Wett . HQsoi Profelsof btfft jA kn a~ring
d0
d+
Thesis Supervisorjiai rUl I Glac.e'
Accepted by:
Anette E. Hosoi Associate Department Head for Education Chairman, Undergraduate Thesis Committee
Design, Prototyping, and Testing of Apparatus for Establishing a Linear Temperature Gradient in Experimental Fish Tanks
by
Romi Sinclair Kadri
Submitted to the Department of Mechanical Engineering On February 5, 2014 in Partial Fulfillment of the Requirements for the Degree of Bachelor of Science in
Engineering and Entrepreneurship Abstract
Immunology researchers require a new type of fish tank that provides a linear thermal gradient for experimental zebrafish in order to improve the accuracy and validity of their research. Zebrafish require the ability to select their surrounding water temperature in order to react to a simulated viral infection with an optimized immune response. Although countless immunology studies have been performed with zebrafish to date, their validity came into question in early 2013 when it was demonstrated by MacKenzie et. at that the immune response in fish is critically coupled with a form of environmental temperature selection known as behavioral fever. Current research tanks feature a uniform temperature throughout, preventing the fish from being able to "choose" their surrounding water temperature in response to a simulated viral infection. "Fish that are not offered a choice of temperatures and that therefore cannot express behavioral fever show decreased survival under viral challenge." (MacKenzie, et al., 2013)
In this study, a conceptual thermal-fluid system was designed, built, and tested for its ability to establish a stable, linear thermal gradient in a standard-size 10L laboratory tank. The thermal profile of the volume of water contained within the experimental tank was determined from temperature measurements taken at incremental depths. The apparatus was found to produce a suitably linear temperature gradient over a base-to-surface temperature difference of
19.60C; far greater than the temperature difference of 80C necessary for unrestricted behavioral fever to be expressed in experimental zebrafish. As such, it was determined that the approach taken is suitable for future use in the development of aquaria for immunology research and water tanks for other applications.
Thesis Supervisor: Anette E. Hosoi
Acknowledgements
A great number of people have continually inspired and empowered me
during my undergraduate career at MIT, many of whom have helped to make this project possible.
My upmost gratitude goes to Professor Peko Hosoi for her dedication to
providing students like myself with educational experiences that are tailored to their interests and passions. Furthermore, she always makes time to provide students with incredibly thoughtful, individualized advice and support. For me this has included her supervision of this thesis, her support and facilitation of an entrepreneurship concentration being formed within the mechanical engineering program, her teaching in mechanical engineering classes, her advice on numerous technical projects, and the creation of unique experiences for students such as STE@M - the program for Sports Technology & Education at MIT. It is safe to say that MIT simply wouldn't be the same without her.
I am extraordinarily grateful to my parents, stepparents, and
grandparents for funding and supporting my time here at MIT, and to Kenneth Morse - founding Managing Director of today's Martin Trust Center for MIT Entrepreneurship - for convincing them that MIT would be worth their money! Without them, I would not have had the opportunity to be here.
Further thanks go to my father Sunil Kadri and our family friend Simon MacKenzie for their funding and support of this project. In addition, my thanks go to Adam Amsterdam of the MIT Zebrafish Facility and Professor Jacqueline Lees for their enthusiastic support of the biological and practical requirements of the system developed.
Many thanks to my friends and fellow MIT students Nikita Khlystov, Nicholas Davis, and Athanasios Athanassiadis for their valuable advice on various aspects of this project.
While the mechanical engineering department is home to many of the world's most accomplished and esteemed academics, I find it hard to imagine that the department would be able to function without the support of our academic administrator, Brandy Baker. It's become a standing joke with her that whenever I send an email to anyone at MIT requesting any piece of advice whatsoever, it always comes back to me with Brandy cc'd and something in the message body to the effect of "Ask Brandy! She knows all about this..". She's up late every night to help her students beyond the day-to-day; she provides invaluable personal advice to students on navigating MIT's courses, people, and politics; she knows everyone and everything about this place, and I think that most people in the department will share my feeling that we'd be lost without her!
Every class I've taken at MIT has had a deep impact on my ability to understand something about the world or to do something that I love, but one in particular changed my perspective of everything I do: Engineering Innovation and Design, taught by Blade Kotelly. Through a systematic series of experiential lectures and exercises, Blade's teachings allowed me to reach my own conclusion that design is everything; that exceptional design is the most critical element in converting new technologies into a form that will allow them to make a meaningful impact on the world and its people. Moreover, I realized that 'good' design is entirely contextual and therefore constantly changing - not just in terms of people's ever-changing aesthetic tastes, but also in the way that we perceive and interact with technologies across cultures and time. Understanding this in way that I can apply to everything I do has been
one of the most critical learning experiences I've had, and I cannot thank Blade
enough for bringing it to me.
I also thank Professor Jacopo Buongiorno, Sanjay Sarma, Professor
Douglas Hart, Dr. Barbara Hughey, and Paul Ragaller for the learning experiences they provided me in Thermal-Fluids Engineering, Manufacturing, Engineering Systems Design, Measurement and Instrumentation, and Technical Writing, respectively. These courses empowered me with the knowledge and understanding required to solve technical challenges for scalability and impact.
Last but certainly not least, I thank Rosemary Sugrue for supporting me through the past two years in every way possible. From the small things like
making me food as I write these acknowledgements to advising this project
with her knowledge and experience of thermal-fluids engineering and technical writing, to sharing a home with me, to allowing me to set up an 'experimental facility' in our bathtub, and to keeping me sane under the pressure of an MIT education, she's always ready to help me with open arms.
Thank you all for making this project possible, for opening my eyes to the world and helping me to understand my role in it, and for making my MIT experience so extraordinary.
1. Introduction
Immunology researchers require a new type of fish tank that provides a linear thermal gradient for experimental zebrafish in order to improve the accuracy and validity of their research. This project involves the design,
prototyping, and testing of an apparatus for establishing and maintaining a stable, linear temperature gradient in experimental fish tanks.
Zebrafish require the ability to select their surrounding water temperature in order to react to a simulated viral infection with an optimal immune response. Although countless immunology studies have been performed with zebrafish to date, their validity came into question in early
2013 when it was demonstrated by MacKenzie et. at that immune response in
fish is critically coupled with a form of environmental temperature selection known as behavioral fever. Current research aquaria feature a uniform temperature throughout, preventing the fish from being able to "choose" their surrounding water temperature in response to a simulated viral infection. "Fish that are not offered a choice of temperatures and that therefore cannot express behavioral fever show decreased survival under viral challenge" (MacKenzie, et al., 2013).
The target temperature range of the gradient to be established by the system in development is 25*C - 33*C, as defined by the range of temperatures in which behavioral fever is expressed among experimental fish under immune challenge (MacKenzie, et al., 2013). The steady-state temperature gradient should be approximately linear in order to promote freedom of behavioral expression of thermal selection among the experimental fish. The desired flow rate is 10% of tank volume per minute, as dictated by circulation requirements related to fish health. Although the current project does not consider human safety issues such as the presence of unprotected hot surfaces, these must be identified and mitigated during any product development beyond this proof-of-concept.
2. Experimental Tanks
An experimental system was developed in order to test the suitability of various methods for establishing a temperature gradient in the current
application. To maximize versatility, a modular approach was taken. Figures la-e show the various modules used in the experimental setup:
Figure 1a: Cylindrical 2.5L (1/4-size) tank with inlet/outlet valves at top,
middle, and bottom, and an aluminum base
Figure Ib: AquaEuro USA Max-Chill 1/ 13hp in-line
Chiller
Figure 1c: Hydor ETH201
200W in-line Heater
Figure Id: IceProbe Column fan-cooled base
Figure le: Intel STS100A Flat fan-cooled base
Clear PVC tubing connects the tank outlet to a centrifugal pump that circulated water through the heater and chiller (when used) and back into the desired valve at the top, middle, or bottom of the tank. When desired, either of the two fan-cooled heatsinks shown in Figures d & le can be mounted to the aluminum base of the tank in order to provide additional cooling. The
thermal gradient response of various system configurations is determined from temperature measurements taken at incremental depths within the tank after the setup is allowed sufficient time to reach a steady state.
Further information regarding the experimental setup, thermal measurement equipment, system configurations, and measurement procedure can be found in Appendix A, Section 1.
3. Results from Experimental Trials
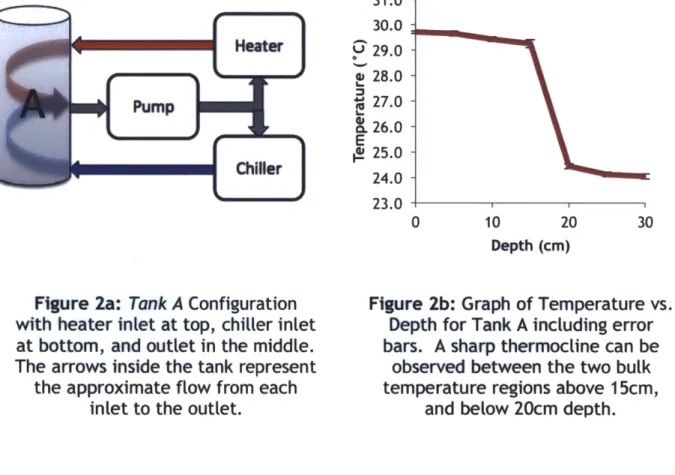
Figure 2a shows the configuration used for Tank A, and Figure 2b shows a graph of temperature as a function of depth:
A. E a' Ca&ler Pump) ChIler 31.0 30.0 29.0 28.0 27.0 26.0 25.0 24.0 23.0 0 10 20 3 30 Depth (cm)
Figure 2a: Tank A Configuration with heater inlet at top, chiller inlet
at bottom, and outlet in the middle. The arrows inside the tank represent
the approximate flow from each inlet to the outlet.
Figure 2b: Graph of Temperature vs. Depth for Tank A including error bars. A sharp thermocline can be
observed between the two bulk temperature regions above 15cm,
and below 20cm depth.
Although Tank A exhibits a reasonable temperature range of 5.6 0.2'C, the flat regions at either end of Figure 2b indicate that a defined thermocline is present somewhere between a depth of 15-20cm. The flow rate in Tank A is higher than the other tanks tested, forcing the bulk temperature of the flowing fluid to dominate over any thermal conduction that may be taking place. The observed thermocline is likely present because of the hot and cool water mixing near the outlet (at 15cm depth), and because the flow rate is too high for any significant conduction to take place. As a result of the flow rate being
higher through the heater than through the chiller, the thermocline is present slightly below the center of the tank.
Figures 3a-c show the configurations used graphs for Tanks B
a
C:HWr Pump]
Figure 3a: Tank B Configuration with heater inlet at top, outlet in the
middle, and additional base cooling.
GD I-4.' 'U I-GD a. E GD I-36.0 ; 35.0 34.0 33.0 32.0 -31.0 ; 30.0 29.0 28.0 27.0 -26.0 0 5 10 15 Depth (cm)
and temperature vs. depth
Hee
Figure 3b: Tank C Configuration with
heater inlet at top, outlet at the bottom, and additional base cooling.
.. Tank B
in Tank C
20 25 30
Figure 3c: Graph of Temperature vs. Depth for Tanks B
a
C includingerror bars.
Tank B exhibits a fairly flat temperature curve from the surface to a depth of 20cm, and a steep linear gradient from 20cm to 30cm. The temperature range is 8.7 0.2 C. As there is no inlet at the base of Tank B, the cooling arises solely from the flat fan-cooled base. The base does not generate any flow (besides some convective current that is assumed to be negligible). Because there is no obvious flow in the lower region of Tank B, the region's
steep linear gradient is likely a result of Fourier's law for conductive heat transfer dominating over any mixing of fluids. The direct flow from the heater inlet to the central outlet creates the flat temperature curve from the surface to 15cm, and the small drop-off from 15 to 20cm depth is likely due to the mixing of the moving heated fluid and the top of the (assumed) stationary chilled fluid in the lower 2 to 1/ 3rd of the tank.
Tank C does not exhibit a notable thermal gradient. A slight drop in temperature occurs near the tip of the cooling probe (between 20-25cm depth), but the total cooling power does not appear to be sufficient to chill the water as it flows down the tank to the bottom outlet.
Figures 4a-b show the configurations graphs for Tanks D & E:
Pump
used and temperature vs. depth
33.0 1 32.0 -U.31.0 30.0 -29.0 E 0 28.0 27.0
-Figure 4a: Tank D & E
Configuration with heater inlet at top, chiller inlet in middle, outlet at bottom, and additional base cooling. Tank D features a higher flow rate through the heater than through the chiller, and Tank E features a higher flow rate through
the chiller than through the heater. 26.0 0 n.Tank D * Tank E - Linear (Tank E) 10 20 30 Depth (cm)
Figure 4b: Graph of Temperature vs. Depth for Tanks D & E including
error bars.
Tanks D & E are configured identically besides a variation in the proportional flow rate between the heated and chilled water. The experiment was initially performed with Tank D in an attempt to eliminate the presence of a thermocline, as in Tank A, by forcing mixing between the chilled and heated water, thus breaking down Fourier's law.
As shown in the temperature vs. depth graph for Tank D (Figure 4b), the chilled water dominates and forces a mild thermocline from 10 to 20cm depth,
with a small amount of conductive cooling occurring above 10cm and a small amount of additional cooling occurring below 20cm as a result of the flat fan-cooled base. Tank E is configured in order to further minimize the presence of a thermocline while maintaining a temperature range similar to that of Tank D
(2.2 0.3'C). As shown in Appendix A, Table 1, the heater:chiller flow rate ratio of Tank D is 2:1, while the heater:chiller flow rate ratio of Tank E is 1:2.
Although not completely straight, the temperature gradient of Tank E is visually linear, with a temperature range of 2.4 0.1 *C. As the flow rate was set to the minimum requirement of 10% of tank volume per minute, this temperature range is assumed to be the maximum that can be attained with
the current experimental equipment.
It was determined that the following effects occur as a result of varying system configuration. A variation in heater:chiller flow-rate ratio in Tanks D &
E results in a change in mean temperature, as well as a change in the thermal
inflection observed at the center of the tank where hot and cool water is assumed to be mixing. The placement of an outlet at the base of the tank without any forced mixing (as in Tank C) results in very low system efficiency, and almost no temperature gradient was observed with the current experimental equipment. Because Fourier's law requires that the fluid is stationary, it is inherently broken down by the presence of fluid flow as observed in both halves of Tank A and the top 2/3rds of Tank B. Tank A proved that a steep thermocline is formed in a tank when two fluids of different temperatures flow towards each other and meet at an outlet, allowing them to leave the tank before they have a chance to mix or transfer heat by conduction as governed by Fourier's law.
A number of assumptions were used to generate the above conclusions
from the experimental results. In order to prove that the location of the thermocline observed in Tank A was indeed offset from center by a higher flow rate through the heater than in the chiller, further configurations would need to be tested in which the heater:chiller flow-rate ratio is varied within the same setup and the thermocline location is monitored in response. In order to prove that Tank C was indeed ineffective at establishing a thermal gradient, a much higher-power cooling column may be used, and that cooling column may need to extend the entire height of the tank in order to account for the breakdown of Fourier's law that occurs as a result of fluid flowing parallel to the direction of heat transfer.
By extending the cooling column to the height of the tank, the heat
transfer would occur radially, i.e. perpendicular to the direction of flow, thus Fourier's law would remain valid. However, a large visual obstruction (such as that posed by a cooling column extending the height of the tank) is not suitable for the research application, which relies on visual observation of the fish.
The suitability of the Tank E configuration comes into question when the issues arise of: scaling to different sizes of tank with proportionally different heights and diameters; and the further mixing of fluid due to the movement of fish throughout the tank. The scaling issue may be addressed on a size-by-size basis, but a CFD model would likely need to be developed in order to define system parameters for each size of tank to be developed without the need for further experimentation. Mixing of the fluid due to fish motion is likely to be an issue, as a disturbance in the natural mixing of the fluid in a low-flow rate system like this will likely have a substantial impact on the profile of the temperature gradient. Because fish tend to be moving constantly, their motion may impact the temperature gradient profile to such an extent that steady state would not be reached. Furthermore, the control system in this case would become rather complicated, as the temperature of the tank would have to be continuously monitored, as opposed to a simpler control system in which only the temperatures of the inputs and outputs are monitored. The effect of fish motion on the temperature gradient profile could be quantified by further experimentation in which a control (non-stocked) tank is configured identically to a live (stocked) tank, and the thermal gradient is measured and compared over time. This effect could also be estimated by CFD analysis.
Although the thermocline present in Tank A was not desirable in the current experiment, it may be valuable to consider exploiting this characteristic in future product development. As realized in the current experiment, Fourier's law breaks down quickly in the presence of fluid flow parallel to the direction of heat transfer. However, if flow occurs perpendicular to the direction of heat transfer, Fourier's law holds true and a linear temperature gradient can be established.
4. Design Concept
At present there is no common apparatus for establishing and maintaining a stable temperature gradient in a fish tank. A fish tank is defined as an open system consisting of: a contained body of water; an in-flow of fresh water; and an outflow of wastewater. Laboratory fish tanks typically do not feature any type of water heater or aerator inside the tank as the in-flow water to all tanks in a laboratory facility is controlled for temperature, oxygen content, and biological material by a system of centralized water processing equipment. As such, the effects of in-tank aeration and heating that are typical of ornamental fish tanks do not need to be considered.
As a thought experiment, Tank A' is created. By using the example from Tank A (Figures 2a-b) and increasing the number of inlets and outlets (with each of the inlets at incremental temperatures from bottom-to-top), it is intuitive that a 'step-ladder' of temperature layers would form inside the tank.
Figures 5a-b show that each of these 'layers' would form between pairs of outlets, and that a thermocline would be present between each layer.
34 -33 ,32 - 31 30 29 28 E 27 26 25 24
4
i I I I 0 10 20 30 Depth (cm) Figure 5a: Theoretical Tank A'Configuration with multiple heater inlets (indicated by colored arrows), each at incrementally greater temperatures from bottom
to top. Outlets (indicated by gray arrows) remove water between
each inlet causing a small thermocline, thus creating a stepped temperature gradient with each step at the same temperature as its respective inlet. The flow rate would be identical from every
inlet in order to ensure even step size across the entire gradient.
Figure 5b: Schematic of Temperature vs. Depth for theoretical tank A', based upon the
thermal response of experimental tank A. Compared to Tank A, the thermal 'steps' are reduced in size as the number of inlets and outlets
increases. The thermoclines sit over the outlet regions, and the
flats sit over the inlets.
Across a constant delta T of 250 C - 33*C from bottom to top, the size of the steps is inversely proportional to the number of outlets. The principle exploited for the design of the current device is that an infinite number of evenly spaced inlets up the side of a tank with temperature evenly distributed between them would create a perfectly linear temperature gradient by reducing the step size to zero. This is analogous to the reduction of step sizes in the use of the midpoint rule for the approximation of a definite integral.
f :
5. Design Specifications
Of course it is not possible in practice to alternate an infinite number of
inlets and outlets up the side of the tank. Instead, the desired effect of an infinite number of inlets can be achieved using a single long inlet running the length of one side of the tank. If the inlet runs the entire height of the tank, the outlet(s) must be placed at the opposite end of the tank.
The long inlet must be heated in such a way that the desired temperature gradient of 25'C - 33'C from bottom-to-top is present in the fluid flowing into the tank. The gradient should be visually linear at the tank inlet, and the gradient breakdown across the length of the tank should be minimized. In order to ensure gradient stability and linearity, the flow rate per unit height must be constant along the entire length of the inlet.
A first prototype should be constructed to fit a standard-size 10L laboratory test tank which can be custom fabricated to accommodate the new inlet/heater element. Where practical, the tank shape should be optimized for heat transfer while maintaining sufficient width so as to avoid excessive restriction of zebrafish swimming space. For ease of manufacture, the 10L test tank should be fabricated by assembling pieces of transparent polycarbonate to form a 6" wide, 12" long, and 12" high cuboidal tank. To ensure compatibility with the water circulation systems that are standard to zebrafish laboratories, the intet/heater element must be able to accept a water supply at a constant temperature from a 1/16" PVC hose. Furthermore, the tank outlet must drain at an even flow rate at all points in the vertical axis to minimize breakdown of the thermal gradient by fluid mixing, and the outflow should pass through a hose that can be directed into the appropriate drainage system in use by the test laboratory.
Standard laboratory health and safety regulations pertaining to the use of electrical power and high-temperature heating elements must be adhered to, however the primary safety consideration for the purposes of this proof-of-concept is that of the welfare of any fish that may be used for live testing. The tank and heater/inlet element must not pose any danger to the fish of electrocution, burning, or poisoning by - for example - any use of corrosive
metals.
The proof-of-concept prototype must be easy to manufacture at low-cost with readily available materials and resources. Off-the-shelf components should be used where possible to simplify the manufacturing process. The design should be scalable beyond the 1 OL prototype tank in order for the system to be used - where practical - in applications beyond the optimization of immunology research on the zebrafish model.
6. Theory of the Breakdown of a Linear Temperature Gradient in a
Cuboidal Fish Tank as a result of Conductive Heat Transfer
Although it is likely that some breakdown of the thermal gradient will occur as a result of fluid mixing and convection currents, we can model gradient breakdown as a function of flow rate across a rectangular fish tank by its primary cause: conductive heat transfer. In a fluid, conductive heat
transfer can be modeled by Fourier's law, which relates temperature gradient
to the heat flux across the length of a fluid body. Fourier's Law states that the
thermal conduction can be expressed as:
dT
qz = - (1)
where qz is the heat flux ( ), A is the thermal conductivity of the fluid ( )
dT i K
and is the temperature gradient across the section (-). Fourier's law assumes that the fluid is static in the direction of heat transfer and maintains a constant velocity in the direction perpendicular to that of heat transfer. Thus in order for Fourier's Law to be a valid model for the current system it must be applied to an infinitesimal slice of water as it passes from the inlet of the tank to the outlet.
The expected heat flux qz can be calculated from the target temperature range (250C - 330C), the height of the experimental tank (0.3m),
and the thermal conductivity of water (0.614-f), as -4.64 -. By Fourier's law, a linear temperature gradient can be established along the length of the tank only if heat transfer is constant in the z-direction. Approximately constant heat transfer between 'layers' of fluid can be attained in the current application only if fluid mixing and vertical convection are minimized, thus the current approach of reducing the layer-inducing thermal 'step size' to zero is most likely to achieve the desired effect. Fluid mixing is considered negligible based on the assumption that the flow exiting the heater outlet is of uniform velocity and is perfectly parallel. Under this assumption, convection in the vertical axis arises solely due to density-induced buoyancy forces across fluid of different temperatures. The density at the 33'C surface of the tank is 2.4!3 (or 0.25%) less than the density at the 250C base. In any case, if vertical
convection were present as a result of the density-induced buoyancy forces, the direction of the resulting motion of fluid within the tank would serve to stabilize the temperature gradient. Higher density, cooler fluid at the bottom of the tank would shift downwards, while warmer, lower density fluid would move upwards; thus working against the vertical conduction due to Fourier's law and transferring heat in the opposite direction. These buoyancy forces (and therefore the extent of heat transfer due to convection) are assumed to
be negligible due to the low magnitude of the difference in the density of water across a 250 C - 330 C temperature gradient.
Under this assumption, Fourier's law can be combined with the first law of thermodynamics to determine the breakdown of an ideal thermal gradient in the vertical z-axis over time. Assuming the thermal gradient remains linear at all times although the total difference in temperature between the bottom and top of the tank is decreasing, the breakdown of the thermal gradient as the water translates across the tank can be approximated by the change in surface temperature over time. Furthermore, this approximation assumes that: there is negligible heat transfer between the water, the tank, and the surrounding air; and that the temperature distribution is symmetrical around the mean temperature of the inlet water, thus causing gradient breakdown to occur from the bottom-up and top-down. This approximation remains true so long as the temperature gradient at the water intet is truly linear. In practice, the change in surface temperature over time was modeled in MATLAB (see Appendix C for script) by iteratively solving for the absolute surface temperature per unit time. The change in temperature in the z-axis per unit time can be expressed
by the heat equation:
-a- (2)
dt dzz
where z is depth within the tank (m), t is time after release from the heater outlet (s), T is temperature as a function of z and t (0C), and a is the thermal
diffusivity:
a- (3)
PCp
where A is the thermal conductivity of the fluid ( w), p is the density of the
K)
fluid (!g-), and cp is the specific heat capacity ( ). The constant A is 0.61 w
for water, and p Et cp are set to 99 6-4 and 4.18 x M3 103 respectively for water kgK
at 25'C - 33"C. The constant a is then calculated as 1.47 x 10-7 M
S The solution of Equation 2 can be found as:
SC-ban 21rt
T(z, t) = Teq - 4(ATO) Zo=1,3,s,...o f cos(-)e(4)
where Teq is the equilibrium temperature ('C), ATO is the surface-base
temperature difference at t=O (0C), z is the vertical distance from the base of
the tank (m), d is the depth of the tank (m), t is time (s), and b is a fitting parameter for the exponential decay.
In order for a stable gradient to be established over the length of a tank, the ratio of the coefficients of diffusive heat transfer rate and convective heat transfer rate (known as the P6clet number) should be much greater than 1. The Peclet number is defined as:
Pe = Tdiff (5)
Tconv
where the coefficient of convective heat transfer rate is:
Tcon- (6)
VX
where L, is the length of the tank (m) and v is the velocity of the water across the tank ( ). The coefficient of diffusion heat transfer rate is defined as:
S
Tdiff =Lz(7)
where Lz is 0.15m: the distance in z from the center of the tank (where the temperature is the mean of the gradient at all times) to the water surface, and a is the thermal diffusivity as defined above. For a theoretical flow rate of 1x tank volume per minute, the Peclet number can be calculated as 2.55. As this is greater than 1, the time for heat to diffuse in the vertical axis is greater
than the time for heat to convect from one end of the tank to the other.
Therefore, when ignoring effects of convection in the z-axis, the established temperature gradient is expected to be sufficiently maintained along the length of the tank for all flow rates above 1x tank volume per minute.
Due to the symmetry of a linear gradient, the increase in base temperature over time is equal to the decrease in surface temperature over time. Figure 6 shows water surface and water base temperatures as a function of time after release from an ideal water inlet, as modeled in MATLAB:
34 -mi Surface 33 - i"Base 32 --31 -30 29 -ff M.28 -E 27 -26 25 24 0 50 100 150 200 250 300 Time (s)
Figure 6: Graph of water temperature modeled as a function of time at the surface (red) and base (blue) of the water contained within an experimental fish tank. This assumes that an ideal inlet is used, featuring a perfectly linear
temperature gradient from bottom to top, even flow rate at all points from bottom to top, and parallel flow from bottom to top. This also assumes that no
thermal energy is lost to the environment, that convective effects are negligible, and that all flow across the tank is uniform, laminar and parallel.
The model predicts that the thermal gradient will have broken down completely by around 275s. This means that with a flow rate of -0.2x tank volume per minute or less, the model suggests that the gradient will have broken down completely and the temperature will be uniform at the end of the tank.
By correlating the flow rate through the tank with the time taken for an
infinitesimal slice of water to pass from the inlet to the outlet, the maximum gradient loss can be estimated as a function of flow rate. Assuming that 1.5" of the experimental tank's 12" length is to be used by the drainage system, the distance between the inlet and outlet is 10.5" (0.27m). Assuming a flow rate of Ix of tank volume per minute, the time taken for an infinitesimal slice of water to pass through the tank is 1 minute (60s). As can be observed in Figure
6, it is estimated that the maximum thermal breakdown at the end of the tank
is 2.7*C from top and bottom with this flow rate, leaving a residual temperature gradient of 27.7'C - 30.3'C; an acceptable gradient for the zebrafish application. Figure 7 shows the modeled relationship between flow rate and the residual gradient at the end of the tank, as governed by the Peclet number for each flow rate:
33 -32 -31
-j
30-w 2,0 -*Surface 27. - . 26 -w 29 0 " .* Base E 28V C 27 26 25 0 0.5 1 1.5 2 2.5 3 3.5 4Flow Rate (V-factor/min)
Figure 7: Graph of maximum thermal gradient breakdown as a function of flowrate, modeled as the predicted temperature of the surface and base of the
water at the outlet-end of the tank. The units of flowrate are factors of total tank volume per minute (i.e. "0.5" means that for a 10L tank, 5L of water passes through the tank per minute). Thermal gradient breakdown decreases
as flow rate is increased.
While increasing the flow rate to a level that would maintain the desired temperature gradient across the length of the tank would not pose any danger to the fish, the energy demands of the system would increase dramatically. This compromise comes as a result of the fact that standard zebrafish laboratories can supply water only at a single, constant temperature. As such, the only practical method by which to generate a linear thermal gradient across the inlet with the available system inputs is to provide sufficient heat to the inlet water (provided at base temperature) to achieve the desired deltaT.
By the first law of thermodynamics, the energy required to heat a flow of
water to a constant temperature (which is, in this case, the mean fluid temperature of the tank) is directly proportional to the mass flow rate. Mass flow rate is directly proportional to volumetric flow rate, thus in order to maximize energy efficiency the desired flow rate should be set in accordance with the maximum permitted thermal gradient breakdown over the length of the tank, as defined by further behavioral experimentation with live zebrafish.
7. Proof-of-Concept Prototype
As a proof-of-concept, a prototype thermal gradient tank system was designed and manufactured. The system consists of: a cuboidal polycarbonate tank, 12" long, 12" high, and 6" wide; a heater manifold with gasket fittings for tank sealing and thermal insulation; two strip heaters with electrical connections; and an outlet mixing chamber shielded by a slotted grate to minimize fluid mixing at the end of the 'live' area of the tank. The tank is manufactured of " polycarbonate sheets, jointed and glued with epoxy and sealed with silicon. The grate used to separate the live area of the tank from the outlet-mixing chamber is made from a 1/8" polycarbonate sheet, with horizontal slots cut out at incremental heights. This allows for fluid to flow up towards the outlet valve behind the sheet, while minimizing fluid mixing in the live area. Figure 8 shows a side-view of the tank layout, excluding the outlet structure: TEMPCO Strip Hestms Tank-sealng pgkets etther side of twnk wall
-
Cold-water InletDirection of fltw
Figure 8: Rendering of proof-of-concept prototype. The large blue arrow represents the direction of intended water flow across the tank. The cold-water inlet features a threaded 1/16" hose fitting inserted into the heater
Tank MWde/ Mantfhld Outlet
manifold to receive water from a standard laboratory circulation system. Rectangular tank sealing gaskets are fitted on top of the heater manifold, either side of the tank wall and compressed by a compression channel bolted to
the manifold outlet. The heater manifold is
manufactured by TEMPCO, shown
designed around in Figure 9:
a type of strip heater
Figure 9: Illustration of a 120V 350W TEMPCO strip heater showing a cross-sectional view of the internal heating coils and ceramic encasement. The electrical posts are visible in the near-side of the illustration, and the mounting
holes appear can be seen at each end.
The heaters are designed to produce 350W as thermal energy when connected to a 120V AC power supply. By the first law of thermodynamics, the
power required to raise the temperature of 2L of 250C inlet water per minute
to the desired mean water temperature of 29*C is approximately 557W. By using two of the TEMPCO strip heaters wired together in series and plugged into a British 230V AC supply, the power drawn is approximately 670W. As the thermal conductivity of air is around 1/ 2 0th that of water, the power lost to the
environment is assumed to be negligible relative to the power of heat transfer between the strip heaters and the water.
In order to maximize heat transfer, the heater manifold is designed to be as thin as is practical for manufacture and operation. For ease of manufacture, the manifold is made of three sheet metal plates, sandwiched together and cold-welded. The cold water (250C) inlet accommodates a
standard 1/16" hose by allowing a threaded hose fitting to be screwed into a drilled and tapped hole that's concentric with a cold-water inlet channel
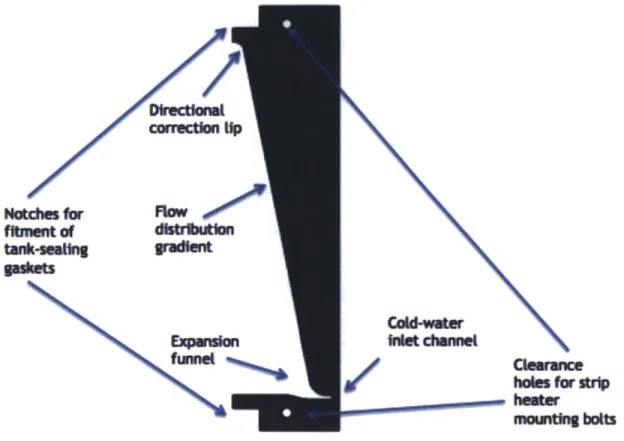
located towards the bottom of the manifold. The interior cavity of the heater manifold is shown in Figure 10:
/coa
CalNCUctI
tip
Mn fwl 0(d-elng3~~~ heater-
hoFigure 10: Annotated rendering of the inner plate of the heater manifold. As implied by the location of the clearance holes for the strip heater mountings, the heaters will be mounted either side of the two surface plates that are cold-welded to the inner plate shown - one to the far side (into the page) and one to the near side (on top of the page). The depth of the resultant cavity is equal
to the 1/16" thickness of the inner plate shown.
The cold-water inlet channel accepts chilled water from a 1/16" hose fitting and passes it through the expansion funnel. The expansion funnel is designed in such a way that the flow is directed evenly across the angular space leading to the large opening that constitutes the manifold outlet. Backpressure is required within the manifold in order to force the water to fill the entire cavity. This backpressure is maintained by the presence of a dual-purpose gasket that is mounted to the manifold outlet, perpendicular to the direction of fluid flow. The outlet gasket is manufactured by water-jet and consists of overlapping flaps of rubber that act as a unidirectional flow control valve. This valve is needed to prevent water from escaping the tank by reversing direction of flow through the manifold if the water supply is turned
off. The inlet pressure required to open the flaps enough to allow water to pass into the tank produces sufficient backpressure to fill the manifold cavity.
As water moves up the manifold cavity it also escapes through the outlet gasket at an even rate, thus the flow distribution gradient must be present in order to maintain even flow velocity at all points within the manifold cavity. Even flow velocity is critical to the effectiveness of the manifold in its capacity to produce a thermal gradient at its outlet, as the underlying principle of the design is that the temperature to which a small volume of water is heated is directly proportional to the time that volume of water remains in contact with the heater element (i.e. the walls of the manifold). The coolest water exits the manifold at the bottom as it has spent the least amount of time inside the cavity. The water exiting the top of the manifold is hottest as it spends the longest amount of time inside the cavity, and the directional correction lip turns the upward flow sideways such that it stays parallel with the horizontal flow exiting the rest of the manifold. Provided that the flow velocity is kept constant at all points inside the manifold (beyond the expansion funnel), the distribution of temperature along the length of the manifold outlet should constitute a linear temperature gradient.
8. Test Method
The proof-of-concept tank was tested by the same method as the experimental tanks: a thermocouple probe was marked at 5cm increments from the tip and inserted into the water through the aluminum guide plate (see Appendix A, Figure 2). A reading was taken at the marked 5cm depth
increments from the water surface to the bottom of the tank (see Appenix A, Sections 1.1-1.2 & 1.4 for further info). While a 1-dimensional method was used to test the experimental tanks, a 2-dimensional method was used for the current system in which temperature measurements were taken at the inlet, center, and end of the tank. This method was used in order to quantify true gradient breakdown. Figure 11 shows a side-view of the tank with the test
Outlet Mixing Chamber
I
Water Surface
I
I= = I w WW LU --- 7I_= JJ___ I 1 1,uw .~~~Outlet
Valve
I
I
- I End R IN
FI
I
I
I
II
I
N
N
-I4 Middle Tank inlet/ HeaterI
Surface
5cm 10cm 15cm 20cm 25cm Base HeaterFigure 11: Illustrated side-view of the proof-of-concept tank. Blue crosses indicate the temperature measurement locations. The green lines represent the axes along which the thermocouple probe is inserted into the tank during testing. The heater axis measures the temperature gradient from the heater outlet while the middle and end axes measure the breakdown of the thermal gradient as the water flows across the tank from right-to-left. The heater measurements are taken a few millimeters from the heater outlet, the end measurements are taken 1" in from the outlet grate that separates the outlet
mixing chamber from the rest of the tank, and the middle measurements are taken at an equal distance from the heater and end measurement locations.
All measurements were taken in the center of the tank in the axis perpendicular to the page.
Measurements were taken at all points shown at various time intervals after startup. Prior to startup, the tank was pre-filled with water at 140C (the
uniform circulation temperature in use at the laboratory facility) and the laboratory water supply was connected to the manifold's cold-water inlet. The flow rate was calculated by measuring the volume of water that passed through
---I
the tank outlet in a one-minute period. At startup, the heaters were connected to a 230V electrical outlet, drawing 670W for heat generation.
9. Results & Discussion
The flowrate was measured at 0.43L/minute (4% tank volume/minute): giving a Peclet number of 0.023 < 1. This flow rate significantly lower than an
optimal flow rate for minimizing gradient breakdown while also keeping energy demand reasonable, as highlighted in Section 6 above. Unfortunately the flowrate at the test facility was determined by the standard circulatory equipment in use and therefore could not be altered. By the first law of
thermodynamics, 670W of thermal conversion at 100% efficiency equates to a mean temperature increase of 22.4*C to the water at a flow rate of 0.43L/minute, thus at 100% efficiency, an inlet temperature gradient of 140C -58.8'C would be expected in the prototype system. Figure 12 shows the actual
temperature gradient observed at the heater outlet:
0 0 0 0 0 0 0 0 0. ., 0 0 0 0 ." 20MINS =N&=22.5MINS mqb e25MINS am"=070MINS 0. 0 0 0 * * *Target **** 1% i I ncIy *., *0* *00. .0* *****ee ,ol( ... Surface 5 10 15 Depth (cm) 20 25 Base
Figure 12: Graph of temperature vs. depth at the heater outlet at set time intervals after startup. The target temperature gradient for 140C water input
is indicated by the dotted blue line. From 20mins - 25mins, the gradient straightens out to become increasingly linear, however at 70mins the gradient
has distorted to some extent. The error on this graph is smaller than the marker size. 60 55 50 -45 U 40 0630 -E 25 20 15 -10
-The gradient observed at the heater outlet is significantly steeper
(AT=19.60C) than the target (AT=80C) but it is much shallower than expected at 100% efficiency. Analyzing the base measurements, it seems evident that the water temperature in circulation increases by around 30C between 25mins and 70mins, thus an increase of 2.3C in the mean heater outlet temperature is observed during that period. The true inlet water temperature was not measured at 25mins or 70mins. Furthermore, the small increase in temperature between 25cm and the base of the tank at 70mins is likely due to residual warming of the bulk fluid that sits in the pocket underneath the heater outlet, as can be seen at the bottom-right of the tank in Figure 11 above.
For further development of the heater manifold, two key parameters must be assessed. The first is the profile of the gradient established; the other is the thermal conversion efficiency. Although advisors to the project have identified that the gradient observed in Figure 12 above is sufficiently linear for experimental fish to express behavioral fever, the linearity of the temperature gradient profile could be improved in two ways. First, the possibility of an uneven heat distribution from the strip heaters can be compensated-for by adjusting the profile of the flow distribution gradient indicated in Figure 10 above. By further experimentation, the heat distribution across the strip heaters could be analyzed for 'warm' and 'cold' spots, and the flow rate through the respective parts of the manifold adjusted by thinning or thickening the cavity, thus increasing or reducing heat transfer as necessary. Another consideration is that the water-jet used to manufacture the heater outlet gasket may not have allowed sufficient precision so as to ensure even release pressure up the inside of the manifold. Any pressure discrepancies within the manifold result in an uneven flow rate, and therefore an uneven
gradient.
The thermal conversion efficiency can be calculated as the ratio of the difference between the mean and lowest temperatures measured (assumed to be equal to the inlet water temperature), and the difference between the mean and base temperatures of the expected gradient at 100% efficiency. The
100% efficiency case does not consider any bulk fluid warming below the heater
manifold - rather it assumes the heater outlet runs from the base to the surface of the tank. The mean heater outlet temperature measured at 70mins is 25.7*C and the lowest (inlet) temperature is 17.5*C; the mean temperature of the 100% efficiency case is 36.40C with a base temperature of 140 C. The calculated thermal conversion efficiency of the current system is therefore
32.1%. This implies that 8.7kW would be required in order to establish a linear
temperature gradient of 250 C - 330 C with a flow rate of 1x tank volume per minute, as the deemed necessary by the current model in order to ensure sufficient gradient stability. The efficiency could be increased significantly in future iterations by: thinning the manifold cavity in the axis perpendicular to the page (relative to Figure 11 above) to increase conduction through the
water being heated; by encasing the outside of the strip heaters with a thermally insulating material; by trimming the excess manifold material from the right of the heaters as can be seen in Figure 11 above to reduce thermal conduction and radiation into the surrounding air; by manufacturing the heater manifold from a material with higher thermal conductivity; and by using thinner material for the outer manifold plates.
Figure 13 shows the gradient breakdown in the tank, as represented by temperature measurements taken at the middle and end of the tank 70minutes after startup. 40 -Heater OmPMiddle 35 -o End U * Middle/End (Modeled) ' 30 E -20 15 Surface 5 10 15 20 25 Base Depth (cm)
Figure 13: Graph of temperature vs. depth measured at the heater outlet, the middle, and end of the tank at 70minutes after startup. The dotted green line represents the gradient predicted by the model used in Figure 6, as applied to
the larger deltaT produced at the heater outlet of the prototype system. The predicted gradient at the middle and end of the tank is effectively zero as the time for fluid to reach the middle of a 10L tank at a flow rate of 0.43L/min should be 698 seconds (assuming ideal laminar, unidirectional flow): this exceeds the 600second breakdown threshold observed in the model graphed in Figure 6. While the measured gradient is significantly different to the modeled gradient, it is indeed 'steeper' and therefore more desirable for use in the zebrafish application. Despite this, the mechanical implications of the discrepancy observed must be considered.
There are a number of factors that may be contributing to the difference between the measured and modeled gradients, and more thorough experimentation would be required in order to identify the magnitude of the exact causes. Looking closely at the Surface-5cm and 10-15cm regions of the Middle and End gradients, there is a small reduction in temperature between 10-15cm from middle to end, and a small increase in temperature between the Surface-5cm from middle to end. Assuming that the thermal energy is transferred from the lower (10-15cm) region to the higher (Surface-5cm) one, this is likely a sign of convective heat transfer. The flatness of the Surface-5cm region could be another sign that warm fluid is moving to the surface as the water translates across the tank. After rising water reaches the surface it transfers some thermal energy to the air above it, thus lowers in temperature and descends slightly. Over time, the mixing of air-'cooled' water and rising warm water would be expected to produce a flattened temperature region within close proximity to the surface.
Another factor to consider is the cuboidal shape of the tank itself. Since the gradient breakdown does not match the conduction-based model, it may be the case that the water is reaching the middle/end of the tank in far less time than the 698seconds predicted. If that is the case, then the flow is most certainly not unidirectional from one end of the tank to the other. If the flow is indeed travelling at a higher velocity along the central plane of the tank (along which the flow is ejected by the heater) than calculated for uniform flow, then flow is likely to be occurring in the opposite direction along perpendicular planes at the outer edges of the tank. Such a flow pattern could be produced by reflection of the heater flow at the face of the outlet grate. Assuming that the flow rate (and perhaps direction) does vary according to location along the axis perpendicular to the page in Figure 10 (i.e. distance from the central plane along which water is ejected), eddies are likely to form in the corner of the tanks. If present, these are likely to have partial or complete responsibility for the plateau cooling effect observed below 15cm depth at the middle and end of the tank in Figure 13, and for the increase of mean temperature of the tank over time as observed in Figure 12. Fluid is not replaced in areas shielded by an eddy line, thus fluid of a 'new' temperature cannot replace fluid of an 'old' temperature to change the thermal profile of that region of water. Instead, variations in the temperature of these regions are caused by conduction, and by convection to a small degree. If the bulk volume of the tank is heated, yet a large portion of the water rests (cold) behind eddy lines, the eddy water will have a net cooling effect on the tank water as a whole - perhaps resulting in the flattened curve seen below 15cm at the middle and end of the tank. Yet as more and more thermal energy is conducted from the thermal gradient output into the eddy water, that water increases in temperature (albeit slowly), perhaps contributing to the increase in mean temperature shown over time in Figure 12.
In order to minimize the presence of gradient-degrading eddy water and optimize the fluid pathway for uniform flow in future iterations of this system, the tank used should be elliptical in shape. Eddy pockets are likely to exist in the corners of the cuboidal tank used in this study, and the 6" width of the tank was not ideal for promoting uniform flow. With an elliptical tank, the corners would be eliminated such that no eddy pockets could form, and the gradual expansion and re-contraction of the body would encourage uniform flow. Furthermore, an increase in flow rate will reduce gradient breakdown over time while increasing the power required for the same gradient to be achieved.
10. Conclusion
A series of experiments were conducted in order to determine the most
suitable approach for establishing a stable, linear temperature gradient in experimental fish tanks. Following thorough analysis of the observations from these experiments, a design specification was produced that further defined the goals for the development of this apparatus. The physics of establishing and maintaining a thermal gradient were analyzed with respect to time, and these findings were correlated with the flow rate through the tank such that future design iterations can consider energy factors as they relate to gradient sustainability. A prototype was designed and manufactured, and a
temperature gradient of 19.6'C was established (far in excess of the 80C
target) at the outlet of the heater manifold with 32.1% efficiency. The gradient produced was observed to be sufficiently linear for the application of enabling the expression of behavioral fever in experimental zebrafish. The application of this technology will allow for a revision of current immunological research approaches and methodologies, facilitating optimized immune responses in experimental zebrafish. This will serve to further our knowledge of this all-important building block of human medical research.
While the current design was found to meet the practical elements of the design specification, a number of mechanical aspects such as ensuring even flow rate along the length of the heater outlet have not been tested-for and may account for some of the discrepancies between the modeled and measured results. Further iterations and thorough testing are required in order to perform sensitivity analysis on various aspects of the system design and inputs, and to optimize the system for energy efficiency and thermal-fluid performance. Future iterations may consider: altering of the heater manifold to improve heat transfer; changing the shape of the test tank from cuboidal to elliptical; varying the flow rate between experiments to assess breakdown effects relative to the proposed model; using a higher-precision manufacturing process for the heater outlet gasket; encasing the outer heater surfaces in an insulated material; and quantifying the distribution of heat across the heater surfaces such that flow rate adjustments can be made to compensate.
References
MacKenzie, S., Boltafia, S., Rey, S., Roher, N., Vargas, R., Huerta, M., et at.
(2013, June 14). Behavioural fever is a synergic signal amplifying the innate
Appendices
Appendix A - Extract from Measurement & Determination of Thermal
Gradients in Experimental Fish Tanks
1. Prototype System & Testing Configuration
Figure 1 shows the prototype system that consists of a cylindrical tank, 108mm ID x 330mm height, with valves located at 0,150, and 300mm from the base.
Figure 1: Photograph of the assembled prototype system, consisting of the chiller (bottom), tank (top-left), heater (top-right), pump (center), and clear
PVC tubing. The thermocouple probe and guide plate used to take temperature measurements from the system are shown to the right.
As shown, clear PVC tubing connects the tank to a centrifugal pump, an in-line water heater, and an in-line water chiller that comprise the thermo-fluid control system for the tank. Adjusting the tightness of a clamp across the intermediary stages of tubing controls the flow rate through the heater and chiller.
The heater flow rate for each experiment was measured by filling the tank to just below the surface (hot water) inlet in order to provide backpressure to the lower inlets/outlets, and filling a measuring jug from the surface inlet for a period of 30 seconds. The volume of water captured was then multiplied by 2 to give the volumetric flow rate in L. The total flow rate was then measured by repeating the process for the pump output, and the chiller flow rate was calculated by subtracting the heater flow rate from the total flow rate.
Once the relevant flow rates were recorded, the full system was left running for one hour to reach steady state. Thereafter, the temperature was measured as a function of depth for a single system configuration by dipping a temperature probe into the tank at incremental depths of 5cm. The temperature readings were logged in Microsoft Excel along with details of the system configuration and a calibration offset. Temperature measurements were performed four times for each experiment to ensure accuracy, and experiments were performed in total - one for each system configuration.
1.1 Thermal Measurement Equipment
A long metal-encased Vernier TCA Thermocouple probe was used to
measure water temperature at a series of depths. Figure 2 shows a tight-tolerance location plate that was manufactured and used to keep the probe centered in the tank for all measurements.
Figure 2: Photograph of the machined aluminum plate used to center probe for measurements. The plate was laid over the top of the tank and its straight edges were aligned tangentially with the rim of the tank at all four sides. The
thermocouple probe was then inserted into the hole with a tight fitment so as to ensure consistent radial placement as the probe was inserted deeper into
the tank. Although the current experiment called for measurements to be taken only in the center of the tank (i.e. by dipping the probe through the
bottom hole shown above), the multiple holes could be used for taking measurements at a range of radii such that a three-dimensional thermal model
of the experimental tanks could be determined.
A TCA type-K thermocouple reader connected to a LabPro interface
operated the Vernier probe. A laptop running Logger Pro software recorded the probe's temperature reading via a USB connection to the LabPro. The temperature readings were then copied into an Excel spreadsheet in which the system configurations were logged and the data analyzed.
1.2 Thermocouple Calibration
A medical thermometer was used to calibrate the thermocouple prior to
each experiment. The medical thermometer and the thermocouple were placed in a bowl of warm water and their readings were taken. The LabPro's inbuilt calibration feature could not be used, so an offset was incorporated into the Excel file in which the data were recorded.
1.3 System Configurations
Six system configurations were tested. Each system configuration is defined by the total flow rate through the pump, the partial flow rate through the heater and chiller (if used), additional cooling methods when used, the inlet locations for the heated and chilled water into the tank, and the outlet location to the pump. The heater inlet, chiller inlet, and outlet locations were fixed by the three valves located at 0mm (bottom), 150mm (center), and 300mm (top) from the base of the tank. Table 1 shows the six configurations tested:
Table 1: Experimental system configurations including flow rates, inlet/outlet locations and additional cooling method where appropriate.
Top (Heater Inlet)
Center
Bottom
Base (Additional Cooling)
Figure 3: Graphical representation of the experimental tank, showing the top, center, and bottom valve positions and their respective depths. The
application of cooling to the tank base is also indicated. Figures 4 & 5 show the two additional cooling methods used: the
cooled base"; and the "column fan-cooled base":
"flat
fan-Figure 4: IceProbe column fan- Figure 5: Intel STS100A Flat
fan-I
0mm
150mm