4>
0^CMtr*^,
/
Ii4>
Dewey
Massachusetts
Instituteof
Technology
Sloan
School
of
Management
Working
Paper
Deciding
between
Sequential
and
ParallelTasks
inEngineering
Design
RobertP. Smith StevenD. Eppinger
October 1995
Working Paper
Number
3858ContactAddresses: Prof. Robert P. Smith
Department of IndustrialEngineering
University ofWashington Seattle,
W
A
98195smith
@
ieng.washington.eduProf. Steven D. Eppinger Sloan School of
Management
Massachusetts InstituteofTechnology Cambridge,
MA
02142-1347MASSACHUSETTSINSTITUTE
OCT
24
1995 LlSnAR.'ESAbstract
It is generally desirable to
complete
design tasks in parallel in order to reduce the overalldevelopment
time.However,
completing
tasks in parallelmay
sometimes
increase the totalamount
ofrework
thatmust
be done, therebyincreasing the total engineering effort, the
development
costand
the lead time.The
technique described in this
paper
helps to decidebetween
serialand
parallelscheduling of multiple tasks in a two-stage design process.
Using
information about task interdependencies, thismethod
calculates theamount
of timeand
theamount
of effort (in engineer-weeks) required for
any
suggested assignment of tasks to thetwo
stages.The
paper
suggestsan approach
forminimizing
time, or effort, orbothby
adjusting the schedule ofwhich
tasks should becompleted
atwhich
time.The
method
is applied to datafrom
acomputer
workstation design problem.1. Introduction
Concurrent
engineering hasbecome
increasingly important in recent years.Concurrent
engineering is aphilosophy
that suggests theneed
to consider design issues simultaneouslywhere
theymay
have been
considered sequentially in the past [Nevinsand
Whitney
1989,Susman
1992].The
divisionbetween
sequential design phases arose historicallybecauseone
set ofdesign issues (typicallyproduct
performance
issues)were
considered of greater importance,and
this portion of the design spacewas
considered first.The
secondary set ofdesign issues (typicallymanufacturing
process design)were
considered only after the initial set of design issueshad
been
decided ('throw it over the wall'.) In recent years the sequential design process hasbeen
considered inefficient, since this type ofdesign processtypically leads to a greater
development
time, greaterdevelopment
cost,and
lower
overall design quality, all of
which
lower
the overall profit generatedby
the design.Concurrent
engineering in its broadest definitiondoes
not only considerperformance
and
process design issues, butmany
other life cycle issues (such as reliability,environmental
impact, service, testing,and
so forth)which
have been
historically neglected in theproduct
design phase.Yet the division
between
design phases arose for valid reasons. Insome
industries atsome
times therewas
a benefit tohave
only thosewho
createdmost
of the value be responsible for creating the design.The
inclusion ofany
other designissues
would
lead to toomany
peopleand
toomany
concerns being involved earlyin the design process. It is difficult to organize
complex
design processes,and
toachieve
complete
consensusamong
all of the playersmay
be inefficientand
expensive.
Development
time isan
importantdeterminant
of eventual success in themarket
[Blackburn 1991,Smith
and
Reinertsen 1991].One
of theprimary
reasonsthat concurrent engineering has
become
a significantmovement
is becauseconcurrent engineering is able to lessen the
amount
of time it takes todevelop
aproduct
and
bring it to market.We
believe that inmost
cases it is beneficial to separate the design processinto multiple phases. In this
paper
we
offer amodel which
can help engineersand
managers
decide towhat
extent concurrent design is appropriate in their design environment.The
model
isbased
on
thework
transformation matrix(WTM)
model,which
was
developed
in a previouspaper
[Smithand Eppinger
1995bl.The
WTM
method
is away
to calculate theamount
ofwork
completed
duringan
engineering design iteration process.
Our
earlierpaper
describeshow
it is possible toanalyze the eigenstructure of the matrix in order to
determine
important properties about the design process.The
work
transformation matrix concept is in turn basedon
the idea of the design structure matrix(DSM)
which
is a toolused
to identifyserial
and
coupled design tasks [Steward 1981,Eppinger
and
others 1994].Whereas
the earlierpaper
[Smithand
Eppinger
1995b]assumes
that all tasksare
done
during
every iteration, the intent of the currentpaper
is to look at the effects of notcompleting
every task in every iteration.We
demonstrate
here thatthe
WTM
can also beused
toexamine
the effect ofdoing
tasks concurrently or sequentially during a design process,which
can assist in decidingwhen
concurrent scheduling of tasks is appropriate.Design
is acomplex
process ofmany
interrelated tasks.How
these tasks are dividedand
organized has a significant effecton
the eventualoutcome and
successof the process [Alexander 1964,
von
Hippel
1990].Managing
the design processeffectively is not easy, but its success is important to the long-term health of
technology
companies [Whitney
1990, Clarkand
Fujimoto 1991].The model
in thispaper
addresses the issue of schedulingcoupled
designtasks
by
decomposition. Thisproblem
isacknowledged
tobe
of practical importanceto
complex
design projects,and
hasbeen
addressed in the research literatureby
several
methods.
These
methods
include 'tearing',where
a set of feedback tasks areremoved which
result inan
uncoupled
ordering [Steward 1981,Kusiak
and
Wang
1993]; the sequential iteration model,
where
coupled
tasks are placed in a sequential ordering in order tominimize
the expectedamount
of time taken tocomplete
theentire process [Smith
and
Eppinger
1994a];and
amodel
intended tominimize
the total length of feedback chains incoupled
multi-disciplinary optimization designproblems
[Altusand
others 1995].There
are other recentmodels which
address theproblem
of determining the appropriateamount
of parallelism in theproduct
development
process.One
suchmodel
explore the casewhere
a project is divided into anumber
of identical tasks[Hoedemaker
and
others 1994].As
thenumber
of tasks increasesbeyond
a criticallevel the time taken for
communication between
tasks increases,and
the overall time forcompleting
the project increases.An
alternativemodel
presents a caseUnder
these conditions it is desirable to limit thenumber
of taskswhich
arescheduled in parallel in order to
minimize
the cost of completing the design project.Both of those papers
on
the sequential/parallel task scheduling decision relyon
simpler mcxiels of the structure of the design process.They do
not explore the asymmetrical interconnectednessbetween
tasks,and
how
that interconnectednessaffects the scheduling of tasks.
Another
recentpaper
(Krishnanand
others 1995]models
the overlapping (parallelism) oftwo
activities within aproduct
development
process to determine the optimal overlapping conditions basedon
the nature of the information coupling the pair of tasks.Our
currentpaper
retainssome
of theasymmetry
of theKrishnan
model
while extending to the multi-tasktwo-stage case.
The
remainder
of the paper is laid out as follows: Section 2 describes theWork
Transformation Matrix as given in the earlierpaper
[Smithand
Eppinger
1994bJ. Section 3 describes
how
theWTM
can beused
to describe atwo-phase
design process. Section 4 looks at thetwo-phase
process asan
optimizationproblem
and
suggests
some
heuristic algorithms. Section 5 applies themodel
and
optimization algorithmsfrom
sections 3and
4 to acomputer
workstation design problem. Section 6 describeshow
thismodel
can beextended
tomore
than two-stage design. Section 7 contains the discussionand
conclusions.2.
Review and
Extension of theWork
Transformation
MatrixMethod
The
design structure matrix, the precursor of theWTM,
identifies the tasks involved in the design process,and
shows
theways
that information is transferredbetween
tasks [Steward 1981,Eppinger
and
others 1994].Each
row and
corresponding
column
in the matrix concerns the information flows (inputsand
indicates the other tasks
from
which
that taskneeds
information,and
each entryon
the
column
of a given task indicates the other tasks towhich
that task givesinformation.
The
DSM
method
isused
to identifywhich
taskscan
bedone
in parallel,which
tasks canbedone
purely sequentially,and
which
taskshave
cyclicinformation flows
and
therefore require iteration to be completed.The
WTM
isan
extension to theDSM
which
contains additionalnumeric
information.
The
WTM
containstwo
separate sets of matrix data.There
is aoff-diagonal matrix
which
contains thenumbers which
indicate theamount
ofrework
done
during
the iteration process.There
is also a diagonal matrixwhich
contains the times for each task. Figure 1shows
an
example
two-taskWTM
containing bothrework
and
time data. (Because of thecomplementary
structure of thetwo
types ofdata it is also possible to writeboth types ofdata in
one
matrix.)A
B
A
B
(a)
Rework
matrix (b)Time
matrix Figure 1.Example
WTM
The
data in Figure 1(a) are interpreted as follows:Every
time taskA
isdone
completely, task
B needs
tohave
40%
of itswork
redone. Likewise,when
taskB
isdone
completely20%
of taskA
needs
tobe
redone.From
Figure 1(b)we
see taskA
takes 4 units of time to complete,and
taskB
takes 7 units of time to complete. These are linear factors, sodoing
40%
of taskA
requires 1.6 units oftime (=0.4x4),and
doing
20%
ofrework
on
taskA
generates8%
(=0.4x0.2) ofrework
for task B.The
assumptions
made
in constructing theWTM
model
are as follows:• All tasks are
done
in every stage.•
Rework
performed
is a linear function of thework
done
in the previous iterationstage.
•
The
work
transformation parametersdo
not vary with time.Discussion of the vahdity of these
assumptions
can befound
in the earlierpaper
[Smith
and Eppinger
1995b].The
model
described in Section 3below
explicitlyrelaxes the first
assumption
above.Each
iteration is characterizedby
awork
vector u, . This vector indicateshow
much
of each task isworked on
in the t-th iteration.The
initialwork
vector u^ isavector of Is,
which
indicates that allwork
needs
to bedone on
all tasks during thefirst iteration.
During
each iterationwork
is created for the next iteration accordingto the linear rule
m,„=Am,
(1)where
the matrixA
is therework
matrixfrom
Figure 1(a) above.The
totalamount
ofwork
done
during
the iteration process is U, thesum
ofall the
work
vectors.U
=
t^i. (2)The
totalwork
vectorU
is multipliedby
W
in order to get the totalamount
of time spenton
each design task,where
W
is a diagonal matrix of task times (Figure 1(b)).R
is the vector ofamount
of time spenton
each taskduring
the iteration process.R
=
WU
=
WY,u,
(3)(=0
which
can alsobe
written asR
=
wf^A'u„
(4)(=0
or, if the
maximum
eigenvalue ofA
is less than 1 (these areknown
as stablematrices, see
Smith
and Eppinger
[1995b] for a discussion of this issue), equation (4) can be simplified toR
=W{I-A)-'u,
(5)The
total time spent tocomplete
the design processT
is thesum
of the timesfor each iteration stage.
The
time spenton
each iteration stage is the longest timetaken for
any
task in that stage.T
=
£max[WM,f
(6)where
[]*' is the f-th element of the vector within the brackets.Under
worst-case conditionsT
may
be a difficult quantity to calculate. Thereis
no
closed-form expression equivalent to (5) for T; thesummation must
be
calculated explicitly.
The
convergence
rate of the infinite series is controlledby
themagnitude
of themaximum
(positive) eigenvalue of A. If themaximum
eigenvalue of
A
is sufficiently less than unity it is possible toapproximate
T
toreasonable accuracy using only a
few
terms of the infinite series.Effort is the total
amount
of engineering time (in engineer-weeks) spenton
the design process. It is the
sum
of all the time spenton
the individual design tasks.£ =
IR'"
(7)1=1
The
quantities time (T)and
effort (£) are important quantities inmanaging
the design process.
Time
isan
important determining factor of time-to-market, while effort isan
indicator of thedevelopment
cost.Formulas
(6)and
(7) are usefulin calculating these quantities for the fully parallel case.
The
next section introduces the concept of a serial structure of the processand
develops the formulas necessaryto calculate time
and
effortunder
those circumstances.3.
Using
theWTM
toDescribeTwo-Phase
Design
ProcessesWe
now
assume
that thecoupled
design process is tobe
structuredsuch
thatwork
on
some
of thecoupled
tasks canbe
delayed until later in the process.The
WTM
canbe extended
to consider multiple-phase design processes.The
simplestversion (and the
one
which
is explored here)assumes
that there aretwo
phases to the design process,and
that there aretwo
sets of tasks. (See Section 6 for includingmore
thantwo
design phases.)During
the first phase, all of thework
iscompleted
on
a limited set of tasks.During
the second phase,work
iscompleted
on
both sets oftasks, including
rework
of the first setand
all of thework
on
the remaining tasks.It is possible to interpret a
two-phase
design process as corresponding to aproduct design phase
and
a process design phase, but themodel
need
not be limited to that case.The
example
given in Section 5 discusses atwo-phase
design processwhere
the phases are productand
process design.Using
theWTM
method,
it is possible to calculate the design timeand
the design effort for atwo-phase
design process.The
calculations are similar in spirit to the calculation of timeand
efforton
the fully parallel design process described in Section 2.In order to
compare
different serial divisions for theamount
of timeand
effort required
we
must
make some
assumptions:•
The
parameters in theWTM
do
notchange
as tasks switchfrom
first- tosecond-phase
(or vice versa).•
The
quality of final productproduced
by
thedesign process isindependent
ofassignment
of tasks to phases.These assumptions
are strongand
may
notalways
represent design practice.The
first
assumption
is reasonable if the data are indicative offundamental
technicalconstraints
and
relationshipsbetween
tasks, inwhich
case the strength ofdependency
will notchange
a great dealwhether
or not thesequence
changes. If thenature of the tasks
changes
when
an
ordering changes, thenassuming
that theBoth
assumptions
require that the informationneeds
between
the tasksbe
order-independent, in the sense that the types of inputs
and
outputs are comparable.The
work
required tocomplete
a taskand
the typeof output informationproduced
by
a task should notchange
depending
on
the order of the tasks.For example,
suppose
thatan
engineer is attempting to determine the size of a fan necessary to cool electroniccomponents
in a computer.A
separate engineer isdetermining the size of the
power
supply. Both of these are routine design choices,however
these tasks are coupled. Ifthepower
supply
is specified first, then the fanwill be chosen after,
and
then thepower
supply
may
have
to be changed.The
process
used
tomake
a selection of size of eithercomponent
involves calculating the total load (thermal orpower)
of other elementsand
choosingan
appropriate device.Whether
a parallel design structure is chosen, or a sequential structure witheither design task
coming
first, thework
thatmust
be completed
duringany one
undertaking of a task
would
not change, theamount
ofrework
created for the othertask
would
not change,and
the final resultwould
not change.These
areorder-independent
tasks.The
converse case is exemplifiedby
two
taskssuch
as choosing a material fora
computer
caseand
choosing themanufacturing
processused
tomake
the case.These
arecoupled
tasks, yetwe
have
the opportunity tomake
either design choicefirst. This choice will strongly constrain the range of options available to the other design task,
and
therefore affects theamount
of time takenand
theamount
ofrework
createdon
subsequent
iterations.These
are order-dependent tasks.Given
these assumptions,we
can
build amodel
of thetwo-phase
design process.During
the first phase, only the indicated subset of tasks isworked
on.These
tasks creatework
for each other as described in Section 2 above.We
thereforeneed
to find acompanion
equation to (5)above
for the total time vector of the firstphase.
We
need
to consider only a restricted portion of the matrix A. In order tocalculate the total time vector
we
mtroduce
the division matrix K,which
is used to specify the portion ofA
which
is considered during the first phase.The
total time vector of the firstphase
is:R,
=W(/-K^K)"'Kmo
(8)the matrix K. is defined with elements k^^ such that
f1 if / = /
and
the Jth taskis in the first phase''
[0 otherwise
The
value of matrixK
isknown
as a division or state of the system.During
the secondphase
there is initialwork
to becompleted
onlyon
the taskswhich were
notdone
in the first phase. Iterativerework
may
need
tobe
done
on any
task,whether
it is a first or asecond phase
task.R„=W{I-Ar\l-K)u,
(10)The
time for thetwo-phase
processT
is asum
of the times for thetwo
phases,each of
which
is calculated asshown
for the fully parallelWTM
(see section 2).T
= J^max[WKA'Ku,,f^
+J^max[WA'
{I-K)u^f
(U)
(=0 ' (=0 '
The
total effort E of thetwo-phase
process is asum
of the efforts in each of the separate phases.E
='^(R]-^ + R<;') (12)r=l
Using
equations (11)and
(12)we
can find the timeand
effort forany
suggestedsplit
between
first-and
second-phase tasks.For
any
set of coupled tasks,any
subset ofthem
may
be
considered to constitute the firstphase
of the design process.Given
that choice, it is possible tocalculate the time
and
effort for that division using equations (11)and
(12). It isdesirable to simultaneously
minimize
both the timeand
effort forany
givenprocess.
However,
it is not necessarily possible to lower both for all design projects.Therefore,
we
must
sometimes
attempt to lower the time at theexpense
of raisingthe effort, or vice versa.
We
must
therefore attempt to identify a set ofgood
divisions for
any
one
design matrix,where
goodness
indicates superiorperformance
on
one
orboth criteria. Finding thesegood
divisions is the focus of Section 4.4,
Considering
theTwo-Phase
Division asan Optimization
Problem
It is desirable to lower both the effort
and
thedevelopment
time.As
described in Section 3,
we
have
control over these quantitiesby
choosingwhich
ofthe tasks to
complete
in the first phase,and
which
ofthem
to delay until the second phase.As
such, this is a two-criteria combinatorial optimization problem.As
a first attempt at looking for optimal points,we
have
examined
minimum-time
and
minimum-effort
solutions.The
remainder
of this sections discusses finding solutionswhich
are locally or globally optimalon one
of the criteria.4.1.
Minimizing
Time
and
EffortFinding
known
optimal solutions (in the sense ofminimum
time orminimum
effort) is difficult.We
have
notbeen
able todetermine an
algorithmwhich
findssuch
solutions short of exhaustive search. In the next subsectionwe
discuss
some
heuristic algorithmswhich
find locally optimal solutions, although they are not guaranteed to be globally optimal.4.2. Heuristic for
Finding
LocallyOptimal
Time
and
Effort SolutionsOne
simple (but effective) heuristic solution is to attempt toimprove
the current bestknown
solutionby
switchingone
task of the division to the other phase. This is not a sophisticated algorithm,and
may
be
trapped finding localoptima
which
are quite farfrom
the globaloptimum.
In practice, this algorithmdoes
quite wellwhen
the optimization criterion is effort,but
not as wellwhen
theoptimization criterion is time. For discussion
on
the effectiveness of this heuristicon
an industrialexample
see Section 5.Heuristic
Algorithm
(1-opt)Step 1. Generate a
random
starting division.Step 2. Switch
one
taskfrom
thephase
inwhich
it is to the other phase. Step 3. Evaluate the current division to see if it isan
improvement
(on eithertime or effort,
whichever
we
are considering), if not then switch thattask back to its previous phase.
Step 4.
Go
back to step 2 until there areno
more improvements
available.A
(slightly)more
complex
version of the previous algorithm is its 2-opt counterpart. That is, replace step 2 with:Improved
Heuristic (2-opt)Step 2a. Switch
two
tasksfrom
thephase
which
they are to the other phase.The
2-opt algorithm ismore
likely to find solutionswith
values close to the global optimal value, but still can be fooled into finding localoptima
which
are not the globaloptimum.^
Again, evaluating the time criterion ismore
likely to findsolutions
which
are not the global optimal values thanwhen
looking for effort solutions forour
example
problem.Changing
the criterion of interest in Step 3 to incorporate linear combinationsof time
and
effortwould
allow the finding of other Pareto-optimal solutions.No
other
changes
to the algorithmwould
be required.^As anexampleofa matrixwherethe 2-opt heuristic doesr\otalwaysterminateon the globaloptimum
consider thecase where
W
is theidentity matrixand0.7 0.1 0.2'
A
=0.6 0.6
0.1 0.3 0.5 0.2
When
using the effort criterion there are two matrices K at which the 2-opt heuristicmay
terminate, depending on the initial starting state.5. Application to
Workstation
Design
We
have
previouslymodeled
workstation design to becomposed
of45different tasks
which
are related in aWTM
[Smith 1992].The
dependencies
and
task timeshave been
suggestedby
engineersfrom
the project.The
list of tasksand
theircorresponding times are given in
Appendix
A.The
dependencies
areshown
inFigure A.l. In the text of the
paper
all tasks willbe
referred toby
theirnumbers.
Using
the equations in Section 2 for describing the fully parallel designstrategy,
where
all tasks are attemptedfrom
the beginning of the design process, it ispossible to calculate the time
and
effort for the workstation design process.The
fully parallel design strategy has time 51.597weeks and
effort 319.98 engineer-weeks.The
workstation design process as described is naturally divided intotwo
design phases: product design (all tasks with task
number
begirming with Al),and
process design (all tasksbeginning
with
A2).We
wish
to analyzewhether
this isan
appropriate
way
to divide the design process intotwo
phases orwhether
there are betterways
to divide it.The
product/processtwo-phase
solution has time 55.590weeks and
effort 234.45 engineer-weeks. This division has greatlyreduced
the effortwhile slightly increasing the time.
The
product
/processtwo-phase
solution is therefore potentiallyan
improvement,
but theremay
be
still better solutions.We
have attempted
to findsuch
solutions using the heuristics described in subsection 4.2.We
will first discuss the structure of the bestfound two-phase
solutions for timeand
effortand
secondly discusshow
effective thetwo
heuristics are at findingsuch
solutions.The
bestminimum-effort
solutionfound
is given inAppendix
B. (The vectorwhich
corresponds
to theminimum-effort
solution is themain
diagonalfrom
the matrix K. All entrieswith
a 1 indicate first-phase tasks,and
entrieswith
indicate
second-phase
tasks.) It hasan
effort of 134.59 engineer-weeksand
a time of17.060 weeks. This is a significant
improvement
on
either the fully parallel solutionas well as the product /process
two-phase
solution. Mo'^t of tht design tasks in the secondphase
(11 of the 16) are processdesign tasks,which
we
would
expect to see in alow
total-effort process. Ifan
important criterion for the design process is tominimize
engineering effort itmakes
sense not tocomplete
the process design until the product design is substantially complete.The
minimum
time solution is given inAppendix
B. It has a time of 14.746weeks and
an
effort of 151.59 engineer-weeks.Only
nine of the design tasks aredelayed until the
second phase
(asopposed
to 16 in theminimum
effort solution).This
matches
intuition that if it is important tominimize
theamount
of time spenton
a design process, itmakes
sense to beginmore
tasks earlier in the project.Both
theminimum
timeand
theminimum
effort divisions givesome
anomalous
results,such
as delaying choosing the architecture (taskAllll)
until thesecond phase.
The
anomalies arise because of errors in specifying the tasks in the matrix.The
tasksdo
not fit the definition of order-independent tasks as described insection 3.
Even
though
there are feedbacks to (forexample)
the task of choosing theproduct architecture, it is not
meaningful
to suggest that this task couldbe
performed
after taskA11333
(logicand
timing validation).To
handle
such cases, itwould
be possibleto explicitly require certain tasks tobe in
one phase
or the other,and
then reapply the heuristic.Adding
this type ofconstraint
would
not be difficult to implement.The
search space considered in step2 (or step 2a) of the heuristic algorithm
would
simply be restricted to exclude thosetasks
which
cannot feasiblyhave
their schedule changed.Another
alternativewould
be tochange
the weights of the interdependenciesbetween
the tasks. If there is a strict ordering relationshipbetween two
(ormore)
tasks, then it
would
be
possible to increase themagnitudes
of the feed-forwarddependencies,
and
decrease themagnitudes
ofany
feed-back dependencies.The
iteration
model and
scheduling algorithm will thenbe compelled
to schedule the tasks to reflect the effective ordering structure.The
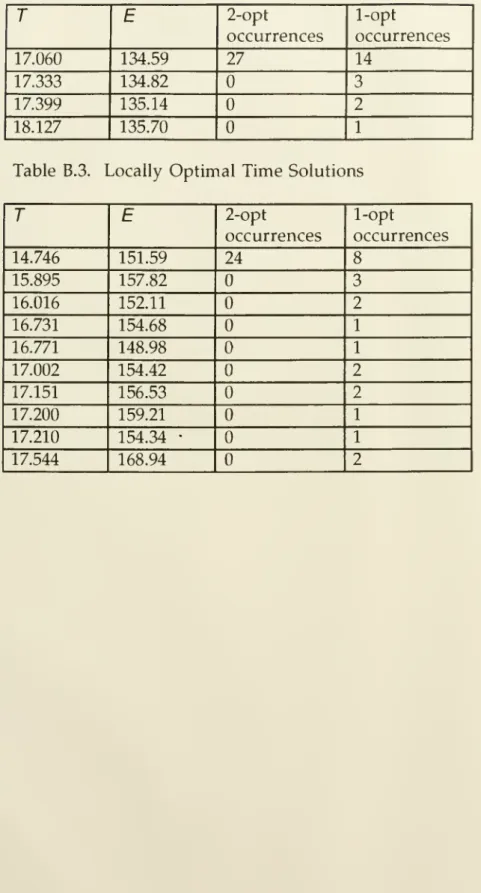
effortminimization
problem
is very wellbehaved
for thetwo
heuristicalgorithms tested.
(Appendix B
contains the values ofall of the solutionson
which
the heuristics
came
to rest, as well as thenumber
of times observed.)On
the given 45-task example, the 1-opt algorithmfound
the bestknown
solution 14 out of the 20 times itwas
run, startingfrom
randomly
generated initial conditions.The
other sixlocal
optima have
effort within1%
of the bestknown
solution.The
2-opt solutionfound
the bestknown
solution all 27 times itwas
run, again startingfrom
randomly
generated initial conditions.
The
timeminimization
problem
is also algorithmically well behaved.The
1-opt solution
found
the bestknown
time solution eight out of the 23 timesrun
(starting
from
randomly
generated initial conditions).The
other fifteen localoptima have
time within9.5%
of the bestknown
solution.The
2-opt solutionfound
the bestknown
time solution all 24 times executed.Finding
one
2-opt solution usingMATLAB
requires approximately threehours
ofCPU
timeon
aVAX
8800. Finding a 1-opt solution requiresapproximately
10
minutes
ofCPU
timeon
thesame
machine.6. Extension to
More
thanTwo-Phase
Design
There
isno
particular reasonwhy
onlytwo-phase
design should be contemplated. It is possible to extend the ideas expressed in thispaper
to design processeswhich
have
more
thantwo
phases. For example, a three-phase design processwould
involve:Three-Phase
Process:Divide tasks into
groups
I, II,and
HI.First phase:
work
on
tasks ingroup
I.Second
phase:work
on
tasks ingroups
Iand
II, but only the tasks ingroup
IIhave
initial work.1bird phase:
work
on
all tasks, but only tasks ingroup
IIIhave
initial work.We
must
definetwo
matrices K, with elements k'and
K„ with elements k'!such that
, [1
if;
=
/and
the zth taskis inthe firstphase
*''1 otherwise
^/,=L
_...:.... (13)„ f1 if/
=
/and
the /th task is in the firstorsecondphase
''
[O otherwise
The
totalwork
time vectors for the three phases are calculated by:Ri=W{I-K,AK,y'K,Ua
(15)R,=W{I-K„AK,r\K„-K,)u,
(16)R„=W{I-Ar\l-K,)u,
(17)Calculating the total time
and
/or total effort for the three-phase process is analogousto using equations (11)
and
(12) for thetwo-phase
process.Minimizing
the totaltime or the total effort of the design project as a function of
whether
each task is in the first, second, or thirdphase
leads toan
optimizationproblem
which
ismore
complex
than theone
which
is discussed in Section 4.As
thenumber
of phases increases, the total effort will decrease, sincework
becomes
increasingly sequential rather than parallel.The
effect ofan
increase in thenumber
of phaseson
the total time is difficult to predict; it is necessary todetermine
the effectsthrough
analysis of theproblem under
study.We
observe in theexample
in section 5 that the fully parallel strategy has a longer
development
time that the best possibletwo-phase
ordering.We
would
not expect that a fully sequential strategywould
have
theminimum
time. Therefore finding thenumber
of phaseswhich
minimizes
the total time requires restructuring theproblem
to allow thenumber
of phases bean
independent
variable.7. Discussion
and
Conclusion
We
have
givenan
explicit representation to the difficultproblem
of decidingwhen
todo
design sequentially rather than in parallel.Our
model
is basedon
thework
transformation matrix(WTM)
model
ofproduct development.
The
model
isable to suggest sequential
and
parallel orderings of taskswhich
lead to lower overallproduct
development
timeand
lower
development
effort.For
our
example
data set,we
believe that the divisions suggestedby
thissystem
do
indicateways
inwhich
the time or effort canbe
reduced.The
divisions suggestedby
the algorithmseem
inmany
respects reasonable.The
method
may
therefore
be
useful in identifyingadvantages
and
disadvantages of serial or paralleltasks in the design process.
In
our
experience, the data required to build thismodel
are not difficult to collect.The
engineers involved with design projects typicallyhave
agood
idea ofthe information
needs
of the taskswith
which
theywork
as well as task times.Polling each of the people involved with a design project creates a complete set of
WTM
data,which
can thenbe used
in themanner
of themodel
in the paper.The
assumptions
required in order to build themodel
in thispaper
are strong. Further investigation isunderway
to buildmore
generalmodels based
on
less restrictive assumptions.
The
simple heuristic algorithmsused
in thispaper
seem
todo
agood
job offinding locally optimal solutions for the
example
data set.More
exploration ofsolution techniques
may
be required for poorlybehaved
or larger problems.The
class of designprojects towhich
this type of analysis canbestbe
applied isthe class of projects
with
which
an
organization already has significant experiencefrom
similar products. This is a large class, asmany
design organizationshave
experience
working
with
the technologies beingused
in theirnew
products.Computer
workstation design falls into this class of design projects. For this type of project it is reasonable toassume
that the datafrom
previous projects can beused
with useful predictive value. If the designers
had no
experienceworking
with thetechnology involved in the project, then
any
estimates of task timesand
dependencies
are likely to be inaccurateand
themodel
would
lose its predictive utility.The
problem
of determining parallel or series division of tasks in engineering design is interestingand
important. Shortening the lead time is a major source ofcompetitive
advantage
in design,and
concurrency has a strong effecton
this score.We
know
that othermodels
of design-tasksequencing
and
scheduling are feasibleand
we
suggestour
model
as a starting point in building othermodels
of thisimportant
problem.
References
AitSahlia, Farid, Eric Johnson,
and
Peter Will, "IsConcurrent
EngineeringAlways
aSensible Proposition?,"
IEEE
Transactions on EngineeringManagement,
Vol. 42,No.
2, pp. 166-170, 1995.Alexander, Christopher, Notes on the Synthesis ofForm,
Harvard
University Press,Cambridge,
1964.Aitus,
Stephen
S., IlanM.
Kroo,and
Peter J.Gage,
"A
GeneticAlgorithm
forScheduling
and
Decomposition
of MultidisciplinaryDesign
Problems," 21stASME
Design
Automation
Conference, 1995.Blackburn,
Joseph
D., Time-based Competition: The Next Battleground inAmerican
Manufacturing, BusinessOne
Irwin,Homewood,
111., 1991.Clark,
Kim
B.,and
Takahiro
Fujimoto, Product Development Performance: Strategy,Organization,
and
Management
in the WorldAuto
Industry,Harvard
Business School Press, Boston, 1991.Eppinger, Steven D., Daniel E.
Whitney,
Robert P.Smith and David
A. Gebala,"A
Model-based
Method
forOrganizing Tasks
in ProductDevelopment,"
Research inEngineering Design, Vol. 6, No. 1, pp. 1-13, 1994.
Hoedemaker,
Geert M., Joseph D. Blackburn,and
Luk
N.Van
Wassenhove,
"Limitsto Concurrency," Vanderbilt University
Owen
School ofManagement
Working
Paper
#95-33, 1994.Krishnan,
Viswanathan,
Steven D. Eppinger,and
Daniel E.Whitney, "A
Model-Based
Framework
toOverlap Product
Development
Activities," M.I.T. Sloan School ofManagement Working
Paper
no. 3635,forthcoming
inManagement
Science, rev.September
1995.Kusiak,
Andrew, and
JuiteWang,
"EfficientOrganizing
ofDesign
Activities," International Journal of Production Research, Vol. 31,No.
4, pp. 753-769, 1993.Nevins,
James
L.,and
Daniel E.Whitney,
Concurrent Design of Productsand
Processes:
A
Strategy for the Next Generation in Manufacturing,McGraw-Hill,
New
York, 1989.
Smith, Preston G.,
and Donald
G. Reinertsen, Developing Products in Halfthe Time,Van
Nostrand
Reinhold,New
York, 1991.Smith, Robert P.,
and
Steven D. Eppinger,"A
PredictiveModel
of SequentialIteration in Engineering Design," M.I.T. Sloan School of
Management
Working
Paper, 1995(a).
Smith, Robert P.,
and
Steven D. Eppinger, "Identifying Controlling Features of EngineeringDesign
Iteration," M.I.T. Sloan School ofManagement
Working
Paper,1995(b).
Smith, Robert P.,
Development
and
Verification of Engineering Design IterationModels, Ph.D. Thesis, M.I.T. Sloan School of
Management, August
1992.Steward,
Donald
V.,"The Design
Structure System:A
Method
forManaging
theDesign
ofComplex
Systems,"/£££
Transactions on EngineeringManagement,
Vol.EM-28, No.
3, pp. 71-74, 1981.Susman,
Gerald
I., Integrating Designand
Manufacturing for CompetitiveAdvantage,
Oxford
University Press,New
York, 1992.von
Hippel, Eric, "Task Partitioning:An
Innovation Process Variable," ResearchPolicy, Vol. 19, pp. 407-418, 1990.
Whitney,
Daniel E.,"Designing
theDesign
Process," Research in Engineering Design, Vol. 2, pp. 3-13, 1990.Appendix
A.Data from Workstation Design
Example
Appendix
B. Resultsfrom
HeuristicAlgorithms
Table 15.1. Best Oh>er\t'd Solutions for Effort
and
Time
Table B.2. Locally
Optimal
Effort Solutions2218
IDate
Due
UHN. )4
49#
I.-\' KA^^i
^ tsai Stp.2
1997SEP
3 19 ^7^'i'l
I 1 20<-l<i ) iU>i^ :^iB Lib-26-67MIT LIBRARIES