Improved False Causal Loop Detection in Polychronous Specificationof Embedded Software
Texte intégral
Figure

Documents relatifs
C’est ainsi que dés la fin des années 70 une structure d’audit a été mise en place sous l’autorité de la Direction centrale Finances ; Î A partir de 1993, l'audit de
In [NT12] we introduced the static software analysis tool MEMICS, which is able to detect race conditions as well as common runtime errors in C/C++ source code.. Common static
by Wallace Stevens fror his poem, The Dwarf bly Anne Carson fromn her book, xa.. The web
is the 4 × 4 covariance matrix of residual position and clock errors, is a 4 dimensional vector whose the first three component are the unit vector of the line of sight oriented in
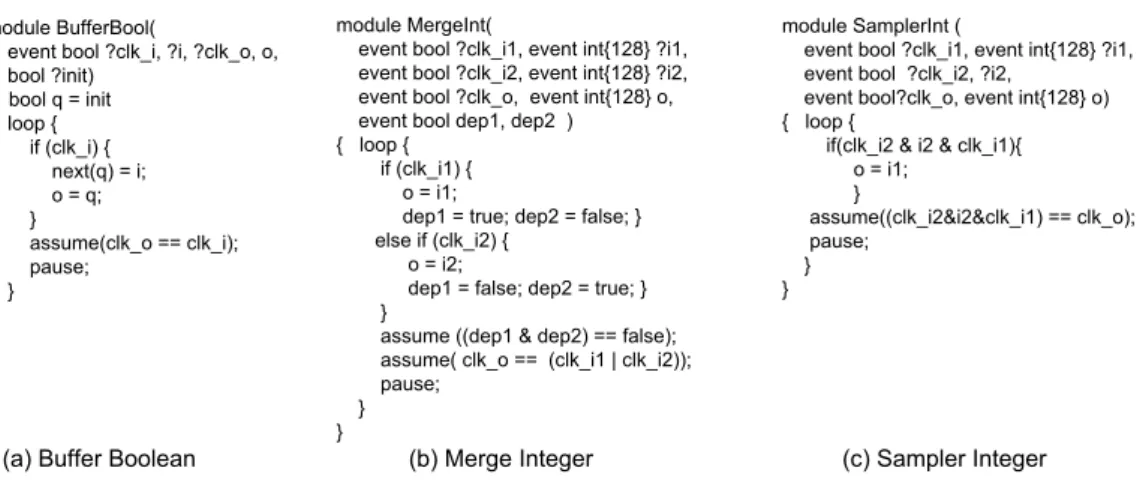
Since at each one of its instants, the signal zM_In has the value that M_In had at the previous instant, equation (a) expresses indeed that M_In is defined by In when a new
The Polychrony workbench implements a multi-clocked synchronous model of computation (the polychronous MoC [9]) to model control-intensive embedded software using the Signal
Figure 11 is a device example which has one output data port temperature output, in Signal it becomes a process with an output temperature, and this output is transfered to
Pour permettre le prototypage virtuel, la simulation et la validation formelle au plus tôt des architectures embarquées à base de composants, nous définissons une modélisation de
