A feedback control perspective on biological control of dengue vectors by Wolbachia infection
48
0
0
Texte intégral
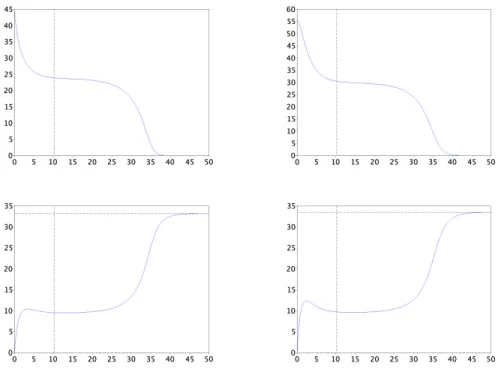
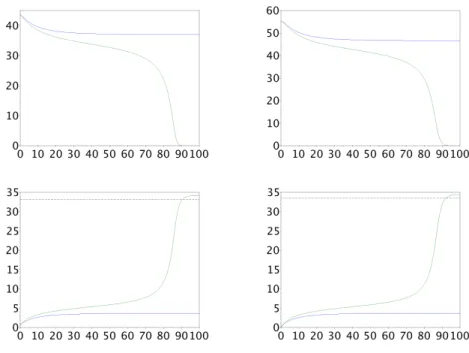
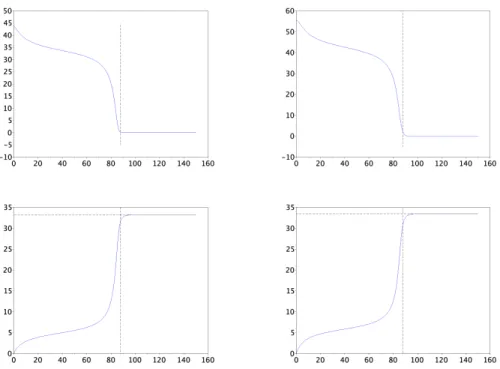
Figure


+4


Documents relatifs