I
I
I
I
I
I
I
1
1
I
I
I
I
I
I
I
1
1
I
I
I
RERmŒBRHflms
Nos remerciements vont tout, premièrement à Dieu tout puisscmt
qui nous a donné la force, la volonté et surtout le courage pour
pouyoir firir ce travail.
Nos remerciements Mne Aj,cha ZIBRA. d'avoir proposé ce
thème et de nous s 'cwoir suivi durant ce modeste trcwail.
On ne peut citer tout le monde, mais tous ceux qui nous ont aidés
d'une f;açon ou d'une autre soient assurés de notre recormaissance.
Cln remercie égalemenl nos parents pour leurs soutierït moral et
financier durant nos études.
Erftn, on ne pourra teri'niner nos remerciements sams une pensée
à l'ensemble de tous les enseignants duramt toutes nos études et en
I
I
I
I
I
1
1
I
I
I
I
1
1
I
I
I
1
1
I
I
I
9ÆèÊÆ-JédébÆœ±c±:
9ÇmzÆtÆJoep6PmorrÆ7iÀrre'omoibeniÆdmqxdiûüubghdiiÆéodbrro86düJZÉ.98:imi}pàn6¢AaÆml,çaddkdÀdmaidÆzæ¢jllla)cÆàiq.ogmmdpfiÆ.
9Çrr-ftzmri
3WrM86qzrd4àmmbriÂmqozfizeegfÂmrœ.
fzÆtbudczzm7JÀrro'qJzmstcÂ7J2/qJm.
GRhpoœ1
1
I
I
I
1
1
I
I
I
I
I
I
I
I
1
1
1
1
I
I
9Ædj-JédÆbz,ce-tÆqbqJJ:
9grmÆCpàtipcxrÆprro'ordidqÆenüdzimmbrzNdehdiiÆdernzÉaiz46.
9ÛrhzÆftpddérn86éœiiACÂàMez4yÆamlp/fiml//e.9g;8DqÀrndjqznÆà,©bzdJmgæ[il@mp,.
9g;8oÜÆ©ydm'qbAzstd7J2/qJ~.
9f-I
1
1
I
I
I
I
1
1
1
I
I
1
1
1
I
1
1
I
I
I
Introducti on gén éral eTable des matières
Chapitre 1 : Modélisation du hŒMS gyroscope
1 . 1 Introduction
1.2 Défirition d'un hÆMS
1.3 historique ...
1.4 Définition d'un gyroscope
1.5 principe de fonctionnement du gyroscope vibratoire
1.6 utilisation
1.7 Modélisation d'un MEMS gyroscope 1.8 Modèle non linaires d'un gyroscope 1.9 Test on boucle ouvert
1 . 1 0 Conclusion
Chapiti.e 2: Commande par mode de glissement 2.1 htroduction
2.2 Notions d'un système à structure variable 2.3 Commande par mode glissant
15
2.4 Conception de la commande par mode glissant et quelque notion de bases ... 16 2.4.1 Notion de base
2.4.2 Conception de la commande par mode glissant 2.4.3 synthèse de la loi de commande par mode glissant 2.5 Avantages et inconvénients de la commande par mode glissant 2.6 le phénomène de réticence problème et solutions
2.6.1 Solution de la couche limite
2.6.2 Solution par modes glissants d'ordre supérieu 2.6.3 Solution par mode glissant dynamique
I
I
I
I
I
I
I
I
I
I
I
1
1
I
1
1
1
1
1
I
I
Chapitre 3 : Commande par mode glissant d'un gyroscope vibratoire
3.1 lntroduction
3.2 Commande par mode glissant d'un gyroscope vibratoire ... 28
3.2.1 Synthèse de la commande 3.2.2 Résultats de simulation
3 .3 Commande par mode glissant dynamique 3.3.1 Synthèse de la commande
3.3.2 Résultats de simulation ...
3 .4 Commande par mode glissant dynamique simplifié 3.4.1 Synthèses de la commande
3.4.2 Résultats de simulation
3.5 Conclusion
41
Chapitre 4 : Coinmande adaptative par mode glissant d'un gyroscope vibratoire
4.1 Introduction
4.2 Commande adaptative
4.3 Principe de la commande adaptative ...
4.4 Commande par mode glissant adaptative d'un gyroscope 4.4.1 Synthèse de la commande
4.4.2 Résultats de simulation
4.5 Coinmande adaptative par mode glissant dynamique 4.5.1 Synthèse de la commmde
4.5.2 Résultats de simulation
50
55
4.6 Coinmande adaptative par mode glissant dynamique simplifié
4.6.1 Synthèse de la commande ...
4.6.2 Exemple de simulation
4.7 Conclusion
Conclusion générale
I
1
1
I
1
1
I
1
1
I
I
1
1
I
I
I
I
I
I
I
I
Table des figures
Figure 1.1 Gyroscope de Foucault
Figure 1.2 Gyroscope
Figure 1.3 Gyroscope vibratoire
Figure 1.4 Résultats de simulation en boucle ouverte (cas linéaire)
Figure 1.5 Résultats de simulation en boucle ouverte (cas non linéaire) ... 13
Figure 2.1 Différents modes de convergence pou la trajectoire d'état
Figure 2.2 Régime de glissement idéal Figiire 2.3 Régime de glïssement réel
17 18
Figure 2.4 Les différents modes pou la trajectoire dans le pLan de Phase
Figure 2.S Attractivité de la surface ... Figure 2.6 Phénomène de réticence
Figure 2.7 Fonction de saturation
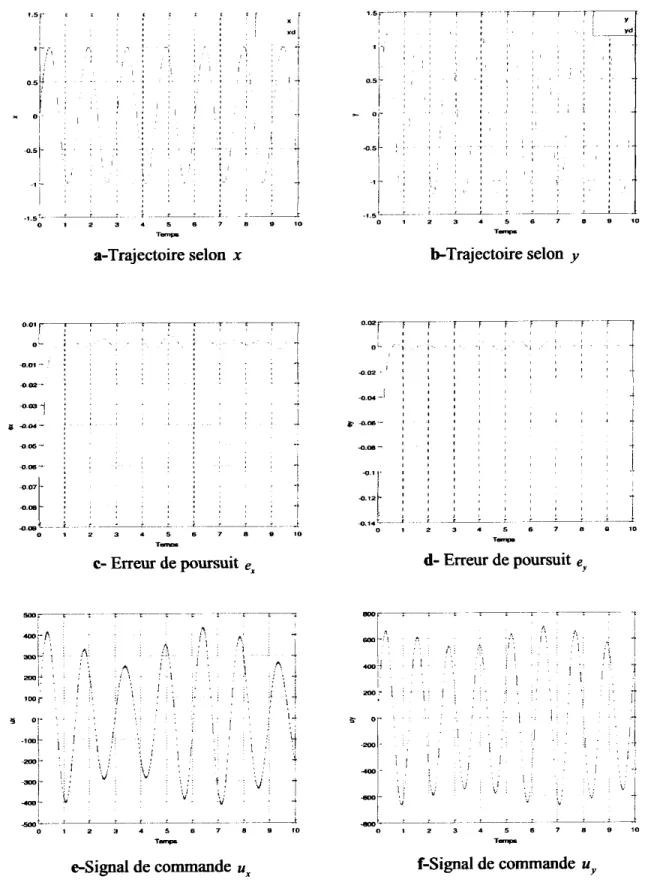
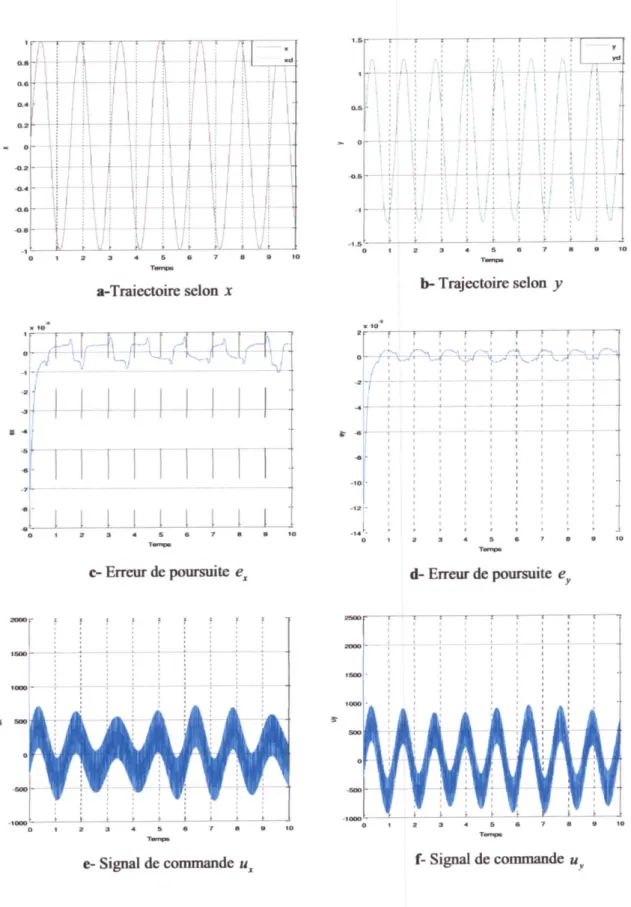
Figure 3.1 Résultat de simulations, utilisant la commande par mode glissement (cas
linéaire)
Figure 3.2 Résultat de simulations, utilisant la commande par mode glissement avec une
variation 50% deQz (cas linéaire) ...
Figure 3.3 Résultat de simulations, utilisant la commande par mode glissement (cas non
linéaire)...
Figiire 3.4 Résultat de simulations, utilisant la commande pæ mode glissement avec une
variation 50% de Qz (cas non linéaire)
Figure 3.5 Résultat de simulations, utilisant la commande par mode glissement dynamique
(cas linéaire)
Figure 3.6 Résultat de simulations, utilisant la commmde par mode glissement avec une
variation 50% def2z (cas linéaire) ...
Figure 3.7 Résultat de simulations, utilisant la commande par mode glissement dynamique
I
1
1
I
1
1
I
I
I
1
1
I
I
1
1
I
I
I
I
1
1
Figui.e 3.8 Résultat de simulations, utilisant la commande par mode glissement dynamique avec une variation 50% deQz (cas non linéaire) .... 40
Fîgure 3.9 Résultat de simulations, utilisant la commande par mode glissement dynamique simplifié (cas linéaire)
Figure 3.10 Résultat de simulations, utilisant la commande par mode glissement dynamique simplifié avec une variation 50% deQz (cas linéaire)
Figure 3.11 Résultat de simulatiom, utilisant la commande par mode glissement dynamique
simplifié (cas non linéaire)
Figure 3.12 Résultat de simulations, utilisant la commande par mode glissement dynamique
simplifié avec une variation 50% de£2z (cas linéaire) ... 48
Figure4.l Résultat de simulations, utilisant la commande adaptative par mode glissement (cas linéaire)
Figure 4.2 Résultat de simulations, utilisant la commande adaptative par mode glissement (cas non linéaire)
Figure43 Résultat de simulations, utilisant la commande adaptative par mode glissement
dynamique (cas linéaire)
Figure4.4 Résultat de simulations, utilisant la commande adaptative par mode glissement dynamique (cas non linéaire)
Figure4.5 Résultat de siinulations, utilisant la commande adaptative par mode glissement dynamique simplifié (cas lïnéaire)
Figure4.6 Résultat de simulations, utilisant la commande adaptative par mode glissement
I
I
I
1
1
1
I
I
I
I
I
I
I
1
1
I
I
1
1
I
I
Introduction générale
1
I
I
I
I
I
1
1
I
1
1
1
I
1
1
I
I
I
I
I
I
Introduction énéraleLe domaine des capteurs est en pleine évolution suivant la progression fiilgurante des technoLogies de fàbrication des composants électroniques et plus particulièrement l 'arrivée sur le marché industriel des microsystèmes à signaux mixtes analogiques - numériques, ainsi que l' émergence des technologies MEMS (Micro-ElectroMechanical-Systems).
Les nŒMS sont des systèmes électromécaniques dont la taille varie de quelques microns à quelques dizaines de nanomètres, Un MEMS est un système microélectronique composé d'éléments électroniques analogiques et numériques mais aussi d'éléments
électromécaniques destinés à assurer des fonctions de capteurs ou d'actionneus.
Ch trouve les hŒMS dans pleusieurs domaines d'applications publics cornme
caméscope, téléphone portable, système de navigation GPS...etc, et industriels comme les capteurs de pressions, les accéléromètres, les gyroscopes. . .etc, pou chaque type d'application
on a un circuit hŒMS avec des performances spécifique.
par conséquence on peut dire que les MEMS gyroscopes sont des capteuis couaiiment utilisés pou mesurer la vitesse angulaiTe dans de nombreuses applications telles que la stabilité et le contrôle de navigation dans les engins spatiaux et les aéronefs, Détection de suvoltage pou l'automobile, l'électronique grand public et la robotique ,..., etc. Les gyroscopes sont des dispositifs qui transfèrent l'énergie d'un axe à l'autre zKe grâce à une accélération dite de Coriolis
Les MEMS gyroscopes vibrants présentent aujourd'hui une nouvelle et
importante technologie, non seulement parce que, pour certains d'entre eux, ils ont
montrés leurs capacité à être très performants (on dit alors qu'ils sont de classe
inertielle), mais que, surtout, dans les autres technologies dites « solid-state » (gyroscopes laser et à fibre optique), les gyroscopes n'ont pas la même aptitude que les gyroscopes vibrants à être miniaturisés et fabriqués à des coûts faibles.
Le principe de fonctionnement de la majorité de tous les gyroscopes vibratoires existants repose sur la génération d'une force sinuso.i.dale de Coriolis due à la combinaison de vibrations d'une masse d'épreuve et d'une entrée de vitesse angulaire orthogonale. La masse d'épreuve est généralement suspendue au-dessus du substrat par un système de suspension constitué de poutres flexibles. Le système dynamique global est un système masse-ressort-amortisseur de à deux degrés de liberté, où la force de Coriolis induite par la rotation agissmt sur la masse provoque le
1
I
I
1
1
1
I
1
1
1
I
I
I
1
1
I
I
1
1
I
I
Introduction
énéraletransfert d'énergie de l'axe de vibration primaire vers l'axe secondaire d'une manière
proportionnelle à la vitesse angulaire.
Par la suite, les gyroscopes vibrants ont étés introduit dans plusieurs applications et les chercheurs sont s'intéressés à améliorer les performances de ce capteur vis-à-vis les imperfections de fabrication et les perturbations extemes surtout que celui-ci est de nature vïbrante, dans ce sens, plusieurs schéma de
commande ont été proposés pour ce système dont le but varie, certains entre eux
incluent :
• Foumir un contrôle précis su les éléments d'actionnement du capteu.
• Améljoration du temps de réponse et la précision de l'appareil.
• Foumir des estimations en temps réel des paramètres incomus du gyroscope. • Compenser les effets des imperfections de fabrication.
• Compenser les effets variables dans le temps tels que l'effet de la température, tels que l'effet de la températue.
Dans ce mémoire, la technique de commande par mode glissement est spécialement utilisée pou ce système incertain perturi)é. Les modes glissants constituent une manière
simple et robuste de réglage des systèmes automatiques, l'idée de base de cette technique est
de forcer le système à atteindre un voisinage de la surface de glissement et à y rester le long
su celle-ci.
L'objectif de notre travail est d'étudier et l'analyser d'une manière approfondie un
gyroscope vibrant, et par la suite, d'appliquer une commande par mode glissant afm d'optimiser et d'améliorer son comportement électrique et physique.
Ce mémoire de fm d'étude est organisé de la façon suivante :
Dans le premier chapitre, une introduction aux MEMS gyroscope est faite, suivi par
me description du principe de fonctionnement ainsi qu'un développement du modèle dymrique du système. On termine par un test de simulation en boucle ouverte su le modèle
linéaire et non linéaire du gyroscope.
Dans le deuxième chapitre, on présente les concepts de base de la commande par mode glissant et le problème lié à cette technique qui est le problème de réticence et on cite quelques solutions afin d' atténue 1'effet de ce phénomène.
Dans ]e troisième chapitre, on applique la commande par mode glissant su le gyroscope. Afin d'éliminer les réticences présent dans le signal de commmde en propose une commande par mode glissant dite dynamique, ainsi qu'une version simple de cette
I
I
1
1
I
I
I
I
I
I
I
1
1
I
1
1
I
I
Introduction
énéraledernière. Pou tous les schémas proposés nous avons effectué des simulations numériques su
le modèle du gyroscope vibratoire linéaire et non linéaire.
Dans le quarième chapitre, vue à la nature incertain du gyroscope la supposition que les paimètres du système sont connue est relâchée, et tous les technique de commande énoncés dms le chapitre précédent sont de nouveau développer dans un contexte adaptative
tous les schémas proposés sont validés par une simulation.
I
I
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre 1 Modélisation d'un MEMS gyroscoi)e
1.1 lntroduction
De nombreux composants présentant des dimensions micrométriques ou millimétriques sont utilisés pou l'élaboration de divers microsystèmes notamment dans les domaines de la microélectronique, la microbiologie, la micro robotique, la micromécanique, la micTo thermique et la micro optique. . .etc. Les différents secteurs économiques concemés sont ceux de l'automobile, du spatial, de l'aéronautique, la santé, la chimie et l'environnement. . . etc. Ces composants sont utilisés dans des microsystèmes désignés généralement par hŒMS (MicTo Electro Mechanical System ou système électromécanique). Les systèmes micro-électromécaniques se décrivent assez bien par leur nom : le teme « Micro » se réfière à la taille
(du micromètre à m millimètre), « Electro » annonce que l'électronique est impliquée et «
mécanique » que des parties mobiles y sont incluses [1].
A la présentation d'un MEMS très important pou l'automaticien qui est le capteu
d'accélération angulaire « gyroscope vibratoire ».
La présentation de ce système se fait dans l'ordre suivant : on commence par des définitions générales su les MEMS et les gyroscopes, ensuite on passe au développement d'un modèle mathématique du MEMS gyroscope vibratoire et on termine par une simulation en boucle ouverte et une conclusion.
1.2 Définition d'un MEMS
Un MEMS est m système microélectronique composé d'éléments électroniques analogiques et numériques mais aussi d'éléments électromécaniques destinés à assurer des fonctions de capteus ou d'actionneurs [1]. Le concept "micromechanics" fait référence à l'utilisation du silicium comme matériau mécanique et/ou à l'appLication de la technolorie
avancée des circuits intégrés pour fabriquer des stnictures mécariques de très petites
dimensions. h technologie des MEMS permet le développement de composants intelligents ; elle ajoute à la capacité de calcul de la microélectronique, l 'aptitude de percevoir et de contrôler des micnocapteurs et des micro-actionneurs. Ces composants profitent à la fois d'une extrême
miniaturisation et dun rapport perfomance/coût très avantageux du fait de leu capacité à être
produits en série par les procédés de fibrication collective [2].
Pami les MEMS commercialisés, on peut citer les microcapteuis (d'inertie, de pression, de force, d'accélération ou chimiques), les microactionneuis (microvalve, microrelais, micropompes, micromoteurs.. . etc) dont la détection ou l'actionnement repose su différents principes.
Modélisation d'un MEMS gyroscope
Chapitre 1
1.3 Historique
Les MEMS ont été développés au début des années 1970 en tant que dérivés de
la microélectronique et leu première commercialisation remonte aux amées 1980 avec des
capteurs de pression su silicium qui remplacèrent rapidement les technologies plus anciennes et constituent encore une part importante du marché des hŒMS. Depuis lors les MEMS ont connu un développement important et restent encore en plein essor.
Les làboratoires ont imaginé et produit un nombre immense de MEMS, avec des
applications allant de l'électronique à la biologie dont les plus importants (industriellement)
sont :
I.es injecteurs pou imprimantes à jet d'encre.
les matrices de micro-miroirs qui définissent les pixels de certains modèles de vidéoproj ecteurs.
la première projection cinéma numérique publique en Euope est basée su
l'utilisation d'un MEMS optique. les capteurs de pression.
les filtres électromécaniques, qui isolent une fi.équence du signal utilisant la résonance d'un système masse-ressort.
les MEMS inertiels, comme les accéléromètres et les gyroscopes. Dms ce travail on s'intéresse au MEMS gyroscope inertiel qui est le gyroscope.
d'entrée
1.4 Définition d'un gyroscoi)e
Le teme « gyroscope » désigne un objet monté de manière à toumer très vite autour
d'un axe de symétrie. S'il faut donner une définition plus simplifiée du gyroscope, c'est qu'il
s'agit d'm dispositif pemettant de comaître la direction constante. Pou avoir cette valeu, de minuscules roues tounent à l'intérieu d'un boîtier qui lui aussi peut toumer dans la direction
pependiculaire à une base fixe. Inventé par Léon Foucault, ce type de dispositif répond à la loi physique des moments angulaires.
De nombrcux types d'objets utilisent ce principe comme la toupie, la roue de bicyclette ou encore la Terre. Tous ces corps présentent des propriétés dites « gyroscopiques » qui servent
dms de nombreux systèmes de guidage et de stabilisation. L'effet gyroscopique, peut se définir que lorsqu' ui mobile toume sur lui-même à grande vitesse, son axe tend à conseNer une
direction fixe dans 1' espace, en 1' absence de toute action extérieure.
Un gyroscope est ui appareil capable de fournir une direction de référence, et par la suite une infomation de rotation angulaire sous la fome d'un écart angulaire compris entre 0°
Chapitre l Modélisation d'un MEMs gyroscope
et 360° dans un rçpèDe absolu appelé aussi rçpère inertiel ou galiléen. C'est donc une mémoire de direction géométrique et matérielle dans l'espace. L'écart angulaire foumi est celui qui existe entre un des aKes du référentiel du boîtier du gyroscope et la direction de réfiërmce [3]. Œ retrouve deux types : les gyroscqpes mécaniques et les gyroscopes à laser (fibres optiques) [4]. I.es premieis gyroscopes fabriqués avaient pou objectif de démontrer que la teme toume
su elle-même. C'est le pendule de Foucault, présenté au public en 1851 ; ce pendule gamde un
plan d'oscillation fixe pendant que la teme toume sur elle-même. En 1 852, Ijéon Foucault et son collègue Froment s'inspircmt des travaux du scientifique allemand pou fabriquer un nouveau gyioscope [5]. Ce nouvel appareil est la base de la plupart des gyroscopes mécaniques actuels.
Figure 1.1. Gyroscope de Foucault.
Un gyroscope est composé d'un rotor toumant autou d'un axe et monté sur un ameau
intérieu toumant sur un axe perpendiculaire au précédent comme le montre la figure suivante :
ï
Figure 1.2. Gyroscope
Ces dispositift transferent l'énergie d'un axe veis un autre axe grâce à l'accélération de Coriolis.
I
1
1
I
1
1
1
1
I
I
1
1
I
I
I
1
1
I
I
I
I
Chpitre 1
Modélisation d'un MEMS gyroscopeUn gyromètre est un appareil fournissant une infomation sur la vitesse de rotation dlm
référentiel local par rapport à un référentiel galiléen, suivant un ou plusieus axes. Dans les
capteus : ui gyroscope est un capteu de position angulaire et un gyromètre un capteu de
vitesse angulaire.
11 faut noter qu'un gyroscope peut fonctionner en gyromètre, mais l'inverse n'est pas obligatoirement vrai. Ceci est lié à la constitution interne même du dispositif. En effet, dans le cas où le dispositif est symétrique par rapport à son axe de rotation, il est susceptible de remplir la double fonction gyroscopc+gyromètre.
Vue l'iinpoitance des gyroscopes dans plusieurs domaines d'application, il est
désomais nécessaire de produire des gyroscopes à faibles voire très faibles coût, avec un
encombrement minimal. De ce fait, les dispositifs entièrement mécaniques ou à faisceaux laser
sont systématiquement écartés. Pou pemettre la miniaturisation de ces gyroscopes, les
ïngénïeuTs se sont donc toumés vets des dispositifs à stTuct\ires vibTantes. De plus, même sÉ les moyens financiens à mettre en œuwe sont Émportants pou réaliser de petits dispositifs, ils peuvent être compensés par le volume important de capteuis à produire. I.e principe de fonctionnement est extrêmement simple. Le rotor ®lateau central en rotation) du gyroscope mécanique classique ainsi que le système à cardan sont remplacés par une seule structure mécanique présentant une symétrie de révolution autour d'un ou de plusieurs de ses axes. La
mécarique des vibrations prédit qu'une telle structure possède une infinité de modes propres
de vibration et de fféquences associées.
1.5 Principe de fonctionnement du gyroscope vibratoire
Les gyroscopes à Structure vibrante sont des dispositifs à semi-conducteurs qui foumisscnt une tension de sortie proportionnelle à la vitesse de rotation appliquée à l'axe
sensible.
Tous les dispositifs de structure vibratoire traitent le principe de base de la détection des forces de Coriolis. Ces forces sont générées lorsquLune particule en mouvement est toumée. Afin d'utiliser l'effet Coriolis pou détecter la rotation angulaire, une structure solide est obligée de vibrer normalement à sa fi-équence de résonance. Ceci est obtenu en appliquant une tension
altemative. h vibration fourit à la structure un composant de vitesse linéaire. Lorsque la
structure est toumée, les forces de Coriolis font que le mouvement de vibration de la structure soit couplé à un autre mode ou plan de vibration de la structure. La grandeur de cette vibration secondaire est proportionnelle au taux de rotation angulaire.
I
I
1
1
I
1
1
1
I
I
I
I
I
I
I
I
I
I
I
1
1
Chapitre l Modélisation d'un MEMs gyroscope
Un hŒMS gyroscope vibratoire comme dans la Figure 1.2 peut être modelé comme un système
mécanique constitué dlme masse d'épreuve m lïbre de se déplacer dans un plan O]p/, dlin système de suspension, et d'actionnements électrostatiques et de mécanismes de détection
attachée par quatre ressorts pou forcer un oscillatoire et détecter la position et la vitesse de la
masse d'épreuve ainsi qu'un cadre rigide qui toume autour de l'axe de rotation.
Figure 13. Gyroscope vibmtoire.
Le principe de fonctionnement, se résume que lorsqu'une force électrostatique exteme est appliquée, provoque une vibration de la masse d'épreuve selon l'axe ];, de plus, si cette demière touine par rapport à 1'axe z, une force de Coriolis est générée selon l'axe }i. Cette force entraine un mouvement de la masse d'éprouve se]on }J, ce déplacement est proportionnelle à la
rotation angulaire auteu de z.
1.6 Utilisations
On trouve les gyroscopes dans de nombreuses applications, pou stabiliser, guider ou mesurer le mouvement de rotation.et parce que le hŒMS gyroscope est de petite taille, à f:rible
coût et faible consommation d'énergïe on trouve les hŒMS gyroscope dans plusieuis
domaines :
• Centrale à inertie, gyrocompas,
• En aviation, lTiorizon artificiel, le conservateu de cap, le coordonnateu ou indicateur
de virage.
• Les jeux : Boomerang, diabolo, Powerball, toupie, yo-yo.
• Stabilisateu de caméra lors d'une capture perturi)ée par le mouvement des vagues, le
tangage d'un avion, etc.
I
I
I
I
I
I
1
1
I
I
1
1
1
I
1
1
I
I
I
I
I
Chpitre 1
Modé]isation d'un MEMS gyroscope• Les motœyclettes doivent une grande partie de leu stabilité à l'effet gyroscopique. • Le gyropode (exemple Segway), véhicule électique monoplace utilise des gyroscopes
pour assureT sa stabïlisation de façon autonome.
• Les hélicoptères radiocommandés en possèdent un pou géreT le rotor anti couple, il peut même intégrer une fonction Head Lock qui lui fait garder son cap quelques soient les conditions.
• L'iphone, la Playstation Vita, la Nintendo 3DS et l'ipod touch ainsi que le Playstation Move et le Wii Motion Plus ont été les premiers appareils électroriques grand public à
posséder m gyroscope à 3 axes. Cet équipement tend à se généraliser su
les smarphones.
• La Station spatiale internationale possède 4 gyroscopes qui pemettent de contrôler son attitude lors de sa trajectoire orbitale autou de la Terre.
• Dans le domaine du forage pétrolier, pou déterminer la trajectoire dlin puits foré. 1.7 Modélisation d'un MEMS gyroscope
l.a dynamique des MEMS gyroscope est dérivée par rapport à deux coordonnées : 1e cadre inertiel fixé dans un espace ineTtiel, et le cadre gyroscopique fixé à la plate-fome de
rotation [6].
L'expression de l'équation de Mouvement de la rnasse d'épreuve se réduit à partir du Principe fondamental de la dynarique (2Cmc loi de Newton) :
rrïï-£f'
Avec : /, C'est la somme des forces extemes :
(1.1)
• IÆ force d'inertie est une force apparente qui agit su les masses lorsqu'elles sont observées à partir d'un réfiérentiel non inertiel, autrement dit dçpuis un point de vue en mouvement accéléré (cm trmslation ou en rotation). Les forces d'inertie se décomposent généralement en deux composantes : la force d'inertie d'entraînement et la force d'inertie
de Coriolis.
/ la foiœ d'entrainement ou force centrifiige, nom courmt mais <abusif» de l'effet
centrifi]ge, est un cas particulier de force fictive qui apparaît en physique dans le contexte de l'étude du mouvement des objets dans des référentiels non inertiels. L'effit ressenti est dû aux mouvements de rotation de ces référentiels et se traduit par une tendance à éloigner les corps du centre de rotation. C'est,
I
I
I
I
I
I
1
1
I
I
I
I
I
1
1
I
I
1
1
I
I
Chapitre 1 Modélisation d'un MEMS gyroscope
par exemple, la sensation d'éjection d'un voyageu dans un véhicule qui effœtue
un virage.
/ la force de Coriolis: est une force inertielle agissant perpendiculairement à la direction du mouvement d'un corps en déplacement dans un milieu (un
référentiel) lui-même en rotation unifome, tel que vu par un observateu
partageant le même référentiel. Cette force est nommée ainsi en lTionneur de l'ingérieur fimçais Gaspard-GLLstave Coriolis.
• La force électrostatique c'est la force de commande w.
On supposent que la rigidité du ressort dans la direction de z et beaucoup plus grande que sa rigidité selon x et y, la masse des prouve est limitée à se déplacer selon les axes (x,y). De plus, on supposant que le gyroscope toume avec une vitesse angulaire est r2zsur un intervalle de temps suffisamment long. Les équations dynamiques de gyroscope peuvent se résumer comme suit :
t
mi;+dHj+[Æ.-m(Q:.+Q:)h+m£2rr2,,)J=w.+2mQ;ji
mj}+dwji+[Æ,,-m(Q:+Q:)]}J+m£2rQ.,,J;=wy-2m£2=*
(1.2)
Avec j[ et )/ sont les coordonnées cartésiennes de la masse d'éprouve, dr , dy etÆx , Æ, sont respectivement les coefficients d'amortissement et fi.ottement. Q] , Q.y et Qz sont les vitesses angulaires correspondant à chaque axes (x,yz), wr et wy sont les forces de commande selon l'axe x, y respectivement. I.es derriers deux temes dans l'équation (1.2) : 2m£2zjJ et 2m£2z* sont les forces de Coriohs.
Sous l'hypothèse typique quer2z z=Qy = 0 , seulement la vitesse angulaire Qz pTovoque le couplage de la dynamique selon x et y. Prenamt on compte les imperfections de fabrication qui entmine un couplage entre les axes x et y. Ire modèle mathématique est réduit :
m3i+dm±+d"j+kmx+kryy=ux+2mç2=ji
my+dry±+dyyjHkxvx+kwy=uy-2mç2=*
(1.3)
avec Æ+y , d]y sont ppelés e]Teu en quadratLire, rçprésente respectivement les cœfficient de couplage d'amortissement et de ffottement, sont principalement dû à l'asymérie de la suspension et au désalignement des capteuis et des actionneurs. Du fait que la vitesse angulaire est généralement fàible par rapport à la fi.équence du système. Et que la masse est faible, les
I
I
I
I
I
I
1
1
I
I
1
1
I
I
I
I
I
I
I
1
1
Chapitre 1 Modélisation d'un MEMS gyToscope
temes de la force de centrifiige -m(r2; +r2:)x et -m(r2: +Q:)); sont négligés ou absorbés
par Le coefficient de ressort comme variation inconnus.
Le modèle du hŒMS gyroscope représentés dans l'équation (1.3) et dans une fome
dimensiomée, c.-àd. que les quantités physique ne sont pas considérées comme une valeu
numérique mais c'est une unité physique. Afin de minimiser la complexité de synthèse des
contrôleus et pou des résultats de simulations meilleurs, de plus, pou avoir un modèle mathématiqueurifiéspouunelargevariétédesgyroscopesuneversionnon-dimensionnéepeut
être obtenue an divisant les deux côtés du modèle par la masse m, la longueu de référence qo et la fi.équence de résonnance naturelle wo , le modèle put d'écrire comme suite :
w:r+w.,,}J=w,,+2Qzj'
j)+dn,i+d,T,j'+Wn,r+W:J'=#,,-2Qzl
Les quantités non-dimensionnée sont données par :
#+dn,#+dp,#U,#+ri,#",#+¢,%+Qz
(1.4)
L'équation (1.4) peut se réécrit :
(;)+(g: ::)(;)+(w`: tJ(;)=(::)-2(Q0z -";) ,,5,
Si on pose que :
q=(;),q=(;),q=(;),D=(z; ::),K=(Wri; ï?),Q=(QoZ -:z),u=(::)
(1.5) peut se réduire à :ë+ Dq+Kq --u -2S2É (i.6Ù Soit + = q et ]:2 = 4 , la représentation d'état de ce système peut s'écrire sous la fome suivante :
=X2
--f(x,,x2)+U
A:Ne/£-_
f(X„X2)=+D+2£2:)x2-K)+
Jr=[i x2]' : est levecteud'étatdu système.
U : est la commande du système.
11
(1.7)
I
I
1
1
I
I
1
1
I
I
I
I
I
I
I
I
I
1
1
I
1
Cl,apitre 1 Modé]isation d'un MEMS gyroscope
1.8 Modè]e non linaires d'un gyroscope
Œ peut avoir m modèle non linaire pou le gyroscope, en prenant les équations des
ressortdelafome(-Æ]r3).Ensuivantlesmêmesétapesdemodélisationetlesmêmeshypothèses vues dans la section précédentes.
I.e modèle dynamique non linéaire du gyroscope peut s'écrire comme suit :
t
Ainsi que le modèle d'état :
Avec nü+dmk+d„v}+kx3X3+k,y=ux+2nÆ2=j mj+dr±+d„}+k,,x+k+,y3=uy-2mç2z± X, = J;2 ±2--f(Xi,X2)+U f(X„X2)--+D+2StùJc2-Kx.-K)¢ (1.9) (1.10) (1.11)
1.9 Test on boucle ouvert :
Dans cette section on va effectuer un test de simulation en boucle ouverte su un MEMS
gyroscope vibrant domée par (1.7) et (1.10), comme signal d'entré on a choisis w = sin(f) ,
Lespaimètresdegyroscopesont[13]:m=1.8*10-7Æg,k.=63.955N/m,Æp=12.779jv/m,
k„--9S.92Nlm,da--"*lo-Nslm,dv=3.6*10' Nslm,d„--l.8*lo-Nslm, e;1 La
vitesse mgulaire Q: = 100x4d/s , prenons la longueu de référence qo = 1/tm et la fi-équence de résonnance natuelle wo = lÆZZz, les paramètres non dimensionnées du gyroscope sont:
K=[;::;; ::2::],Q=[o:, mo.]], D=[:::: :..::], dm le cæ non linéaire, les
0.624
paramètres sont les même on ajoute juste la matrice Ær] =
Les résultats de simulation sont présentés su les figures 1.4 et 1.5 pou le modèle linéaire et non linéaire respectivement. De ces résultats on remarque que les sorties du système présentent ui comportement sinuso.i.dale dû à la nature vibrante de ce système.
1
I
I
I
1
1
I
I
I
I
I
I
1
1
Chapitre 1 Modénsation d'un MEMS gyroscoi]e
a- Signal de sortie selon x
L' lïl,('(ï__ 1
m
1! '1 \1rii 11: 11 1 2 3 . 5 e 7 8 ® 10T-b-SignàL de sortie selon y
Fïgure 1.4 Résultats de simulation en boucle ouverte (cas linéaire).
( 11 111111 lLI[lll 1 1 ! 1 ) 1 2 . . 5 e 7 . ® 10
T-c- Signàl de sortie selon x d- Signal de sortie selon y
Figi]re 1.5 Résultats de simulation en boucle ouverte (cas non linéaire).
1.10 Conclusion
Dans ce chapitre, nous avons préscmté les hŒMS gyroscopes qui sont définis comme étant des ensemble de techniques de fibrication pemettant de réaliscr des structLires et des systèmes de petites dimensions de l'ordre du micromètre et qui accomplissent des fonctions de précision, sont présents dans beaucoup de domaines appncatifs (automobile, avionique, sismométrie, etc.), ils seront préscmts également dans de nombreuses applications fi]tures (téléphonie, jeux vidéo, etc.). Ensuite, nous avons basé sur le Principe fondamental de la
I
I
I
1
1
I
I
1
1
I
I
1
1
I
I
I
I
I
I
I
I
Chpitre 1
Modélisation d'ui) MEMS gyToscopedynamique pou écrire le modèle dynamique du ce système, et on termine par une simulation pou voir le comportement en boucle ouvert d'un gyroscope vibmnt.
I
I
I
I
I
I
I
1
1
I
I
1
1
I
I
1
1
I
I
I
I
Chapitre 2
I
I
I
I
I
I
1
1
I
1
1
I
I
1
1
I
I
I
1
1
I
itre 2 Commande ar mode de lissement
2.1 Introduction
Les lois de commande classiques du type PID sont très efficaces dans le cas des systèmes linéaires à paramètres constants. Pou des systèmes non linéaires ou ayant des paramètres non constants, ces lois de commande peuvent être insuffisaLntes car elles ne sont pas robustes surtout lorsque les exigences sur la précision et autrcs caractéristiques dynamiques du système sont strictes. On doit faire appel à des lois de commande insensibles aux variations des paramètres, aux perturbations et aux non linéarités. Les lois de commande dite à structure variable constituent une solution à ces problèmes. La commande à structure variable (CSV) est,
pff sa nature, une commande non linéaire, elle est basée su la commutation de fonctions des
variàbles d'état, utilisées pou créer une variété ou hyper surface de glissement, dont le but est de forcer la dynamique du système à correspondre avec celle définie par l'équation de myper
surface. Quand l'état est maintenu su cette hyper surface, le système se trouve en régime
glissant. Sa dynamique est alors insensible à peTtuibations extérieures et paramériques tant que les conditions du régime glissant sont assurées. Dans la pratique, rutilisation de cette technique de commande a été longtemps limitée par les oscillations liées aux commutations de la
commande et qui peuvent se manifester su les grandem asservies. Dçpuis, de nombreuses
solutions ont été proposées pemettant de réduire ces oscillations: augmentation de la fi.équence de commutation, commande continue dans une bande autou de la variété de glissement ou décomposition de la commande en une composante continue de basse fféquence et une commande discontinue de haute fi.équence et la médiode de la couche limite où la composante discontinue de la commande est remplacée au voisinage de l'hyper surface de glissement par une fonction continue.
Dans ce chapitre, nous allons donner quelques notions fondamentales de la
CO-m
à structure variable, ainsi que la commande par modes glissants, nous nous intéress principe de base, avantage et inconvérient de la méthode, et les solutions proposées.2.2 Notions d'un système à structure variable
La commande à structure variable par régime glissant, apparue depuis le début des amées 60, grâce aux résultats théoriques du mathématicicm A,F. Philipov, Iæ teme <Æystème
à smcture variable» apparaît à cause de la commutation (variation discontinue) du système et de son contrôleu (ou obseNateu) entre deux ou plusieurs structures [7,8], c'est une commande
non linéaire basée su l'utilisation d'un teme discontinu. Après les travaux développés par 1'équipeduprofesseurEmelyanovenunionSoviétiqueetàcausedesproblèmesdebroutements
et de réalisation, la commande à structure variable a attendu la fm des années soixante-dix pou
L
I
1
1
1
1
1
1
I
I
1
1
1
I
I
I
I
I
1
1
I
itre 2 Commande ar mode de lissement
coma^itre sa réapparition et son épopée avec l'avancée de l'électronique et l'infomatique. En effet,cettecommandeestbaséesuunecommutationàhautefféquencepouunmeilleurégime
glissant-23 Commande par mode glissant
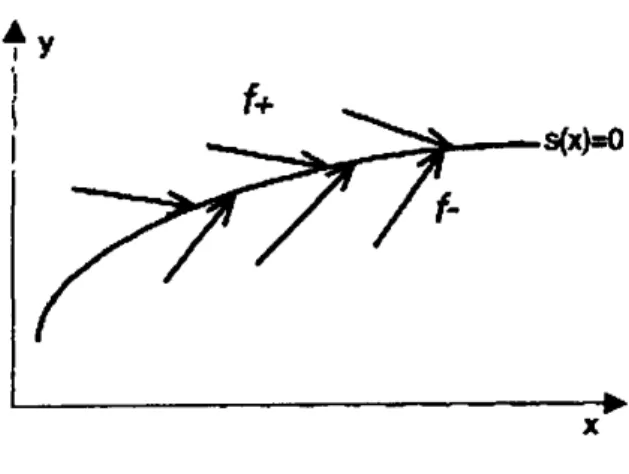
La commande par mode glissant est l'une des techniques de commmde a stmcture variable caractérisée paLr sa robustesse et son efficacité. Elle consiste à commuter à l'aide des fonctionsdiscontinueslastructuredusystèmedynamiquedemanièrequelevecteurd'étatsuive une trajectoire s(x)Ü dans l'espace d'état. Les objectifs principaux de cette technique de commande sont [9] :
• Synthétiser une surface de glissement de telle manière à ce que toutes les trajectoires d'état du système obéissent à un comportement désiré en termes de poursuite, de régulation et de stabilité.
• Déteminer une loi de commande ou de commutation, qui est capable d'attireT toutes les trajectoires d'état vers la surface de glissement et les maintenir su cette surface.
• Réduire le phénomène de chattering @routement), dû à la discrétisation des fonctions de commutation.
2.4 Conception de ]a commande par mode gLÎssant et que]que notion de bases
La commande par mode glissant d'ordre un est une coinmande à stnicture variable pouvant changer de structure et commutant entre deux valeurs suivant une logique de commutation bien spécifique.
La technique des modes glissants consiste à amener la trajectoire d'état d'un système
vers une surface domée appelée surface de glissement et de la fÀire commuter à l.aide d.une
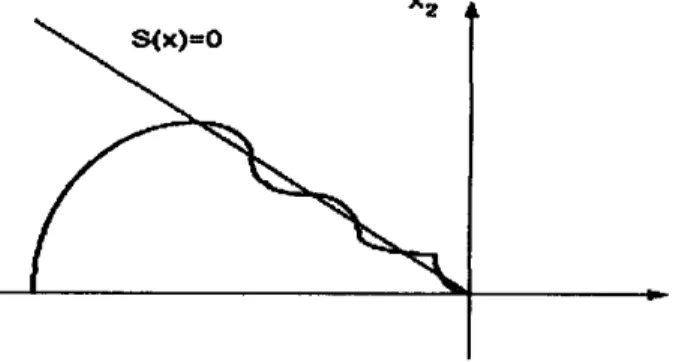
logïque de commutation appropriée autou de celle-ci jusqu' au point d'équilibre, d'où le phénomène de glissement. Cette commande se fait en deux étapes : la convergence veis la surface et ensuite le glissement le long de celle-ci, voir Figure 2.1.
IzMnedÊtowdEEnft
. btEedt EEsgÊmNqkd.gblm't*düÆ
11
\-Hgure 2.1 Différents modes de convergence pou la trajectoire d'état.
1
I
1
1
1
1
1
I
1
1
I
1
1
1
I
1
1
1
1
1
rlitre 2 Commande ar mode de lissement
Parmi les propriétés de mode glissant :
• La trajectoire d'état du système en mode de glissement appartient à une surface de dimension infiérieue à celle de l'espace d'état, par conséquent l'ordre des équations
difiërentielles rédssant le fonctionnement du système en mode de glissement est réduit. • La théorie des modes glissants s'adapte bien pou les systèmes dont la commande est
discontinue.
• La dynamique du système en mode de glissement est déterminée uniquement par le
choix des coefficients de la surface de glissement. 2.4.1 Notions de base
Avant d'cmtamer la méthode utmsée dans la synthèse de la commmde par mode glissant,
nous allons expliquer quelques notions de bases :
• Régime glissant
Si pou tout vecteu d'état initial j[ (fo ) e s la trajectoire d'état reste dans l'hyper surface
s, , jr(f) € s Vf > fo alors jr(f) est un mode glissant pou le système.
Dans la littérature nous trouvons deux types de modes glissants idéaux et réels [ 10].
• Régime glissant îdéa]
IÆ trajectoire (f,x(f)) ayant pour condition initiale (0, jro) est une trajectoire à modes glissants idéaux par rappoTt à la surfaces = 0 , s'ï] existe f, > 0 tel que : Vf 2 f] , les égalités
suivantes soïent vérifiées : (s = j = ... = s(" = 0) I.a notion de modes glissants idéaux n'a pou but que d'exprimer une solution théorique, mathématiquement possible mais irréalisable pratiquement (à cause des imperfections et des limitations physiques des organes de
commutation). Elle pemet d'atteindre de façon plus lisse la surface de contrainte. Ceci est généralement lié au phénomène d'intégration des discontinuités de la commande. Le régime glissant idéal conespond à Lme oscillation de fi.équence infinie et d'amplitude nulle Œigure 2.2)
Figi]re 2.2.Régïme de glissement idéal
I
1
1
1
1
I
1
1
I
1
1
I
1
1
I
1
1
I
I
I
I
itre 2 Commande ar mode de lissement
• Régime glissant réel
Une commande par modes glissants réels sur s = 0 est dite d'ordre # > 0 par rapport à
une fonction à valeu réelle /(£) , tels que € + 0 = /(£) + 0 , si pou n'importe quel ensemble
compact appartenant au domaine de définition, il existe fL > Oet une constantec > 0 telle que Vj > /] l'inégalité suivante soit vérifiée : |(s(/,x(/,£))| < c|y(é)|"
£ est classiquement soit un retard (ou dynamique négligée) soit une imprécision sur la connaissance de 1'état du système. I.a notion de modes glissants réels permet d'exprimer la dépendance de l'algorithme à modes glissants par rapport aux imperfections physiques du système réel (retard d'un actionneu, échantillonnage de la mesure, gain non infini de la fonction signe en zéro, etc...).
Dans ce cas la trajectoire de phase du régime glissant reste au voisinage de la surface de commutation domant naissance à des oscillations indésirables qui diminuent la précision du système et néanmoins sa stabïlité voir la figure 2.3.
Figure 23. Régime de glissement réel a-Surface de glÉssement
Si tout point de s est tel qu'il existe des trajectoires d'état hors de s le contenant alors la surface de commutation s est appelée surface de glissement. Iæ but d.un système de commande
par mode glissant est d'amener asymptotiquement l'état du système à par[ir d'une condition
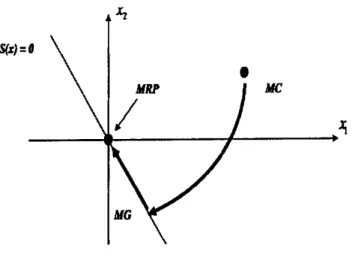
initiale quelconque :r(0) = j[o vers l'origine de l'espace d.état quand f + œ . La trajectoire dans le plan de phase se compose de trois parties distinctes:
• Le mode de convergence (MC)
• Le mode de glissement (MG)
• Le mode du régime peimanant (MRP).
Les différents modes sont montrés par la figure 2.4.
I
1
1
1
I
I
1
1
1
1
I
1
1
1
I
1
1
I
I
1
rlitre 2 Commande ar mode de lissement
Figure 2.4Les difïérents modes de la trajectoire dans le plan de Phase.
2.4.2 Conception de la commande par mode glissant
En général, pou réaliser ce t)pe de commande trois étapes doivent être effectuées [7,11 ] : • Choix de la surface de glissement.
• Détemination des conditions d'existence du régime glissant ou conditions d'accès (la condition de convergence).
• Synthèse des lois de coiimande du mode glissant.
a- Choix de la surface de glissement
Le choix de la surface de glissement conceme non seulement le nombre nécessaire de ces surfaces, mais également leuis fomes en fonction de l'application et de l'objectif visé [ 12].
Considérons le système non linéaire défini par les équations suivmtes :
t
xn-f(x,')+g(x,t'u+d(t.x)
J' = JC,
(2.1)
oùJr=[+,jr2,...,j[nr=[;r,*,..„jft"-'']r€R"estlevecteud'étatdusystèmesupposémesurable, # € JZ I'entrée du système, }7 € Æ La sortie du système, d une pertuibation exteme inconnue bomée (|d(/,j[)| < A) , / et g sont des fonctions non linéaires, g est supposée inversible c.-à-d.
g(jr, f) ± 0, Vf E JZ, x € Jt" , afin de garantir la contrôlabilité.
L'objectif de la commande est de forcer la sortie }7 à suivre une trajectoire de référence );d .pour atteindre cette objectif, on définit l'erreur de poursuite c par :
e -- y - y d
On définit également s, une fonction suffisamment différentiàble par l'ensemble :
19
I
I
1
1
1
1
I
I
I
I
I
I
1
1
I
I
I
I
I
I
I
itre 2 Commande ar mode de lissement
(2.3)
Rçprésente alors uie sous-variété de djmension (n -1) , appelée par la suite surface de glissement ou de commutation ou encore contrainte, elle présente le comportement dynamique désiré du système.
Généralcment, le nombre des surfaces de glissement est choisi égal à la dimension du
vecteu de coimande [11]. I.a surface de glissement est une fonction scalaire telle que la
variable à régler glisse su cette surface et tend vers l 'origine du plan de phase. Plusieurs fomes
de surface de glissement ont été proposées dans la littérature, chacune présente des meilleues perfomancespouuneapplicationdonnée.lÆsurfacelaplusutiliséepouobtenjrlerégïmede
glissement qui garantit la convergence de l'état vers sa référence est défmie par [8] :
J," -(f + C)`n-') C ,2-4,
c : constante strictement positive, choisit de façon à assurer la rapidité et la stabilité du système.
Remarque 2.1
0n dit qu'il existe un régime glissant idéal su s, s'il existe un temps fini fs tel que la solution de (2.1) satisfasse s(x,/) = 0 pou toutf 2 /s .
b- Condition d'eristence du mode de glissement (attmctivïté)
Le choix de la fonction de glissement étant fàit, la deuxième étape consiste à concevoir
me loi de commande qui puisse amener le vecteu d'état à converger vers la surface et y
demeuerjusqu'à l'équilibre (l'origine de phase). Pou cela, il faut que la loi de commamde soit conçue de telle manière à ce que s soit attractive. Considérons la fonction de Lyapounov
suivante :
y=ls2 (2.5)
2
Une condition nécessaire et suffisante, pou qu'une variable de glissement s/]r, // tend vers zéro
est que la dérivée temporelle de v soit définie négative :
=sj <o (2.6)
Cette condition traduit le fait que, dans un voisinage de la surface de glissement, les vecteus destrajectoiresdusystèmedoiventtoujourspointerveiscettesurface,cettedemièreestappelée
condition d'attractivité (voir Figure 2.5).
I
I
1
1
I
I
1
1
1
I
1
1
I
1
1
I
I
I
1
1
1
itre 2 Commande ar mode de lissement
J(
Figure 2.5. Attractivité de la surface
Si la condition (2.6) est vérifiée, alors la variable de glissement et sa dérivée sont de
signe contraire quel que soit le temps et que s " est un centre attracteu pou s. Pou une
convergence en temps fini, la condition (2.6) qui ne garantit qu'une convergence asymptotique vers la surface de glissement est remplacée par une condition plus restrictive dite T`-attractivité donnée par :
-sj = +7Isl , 77 > 0 (2.7)
2.43 Sybthèse de la ]oi de commande par mode glissant
Dms notre cas, la méthode choisie est celle de la commande équivalente. La commande
équivalente est une fonction continue qui sert à maintenir la variable à contrôler su la surface
de glissement, elle est obtenue grâce à la condition d'invariance de la surface :
J=j-0
(2.8)où «q est déduite de la relation j = 0
Physiquementlacommandeéquivalenteprésentelavaleumoyennedelacommandew. Cependmt, cette commande ne force pas les trajectoires du système à converger vers la surface
de glissement. Ainsi, la commande w est la somme de la commande équivalente et d'un composant discontinu assurmt la convergence.
" -"q +"d (2.9)
Afin de satisfrire la condition de Ti-attractivité (2.7), il suffit de choisir la partie discontinue de la commande comme suit :
"` --£s,.g"(s) `2.10)
8 Avec Æest le gain de commande,
choisi suffisamment grmd pou compenser l'écart dynamique entre le système réel et le signal
I
1
1
I
I
I
I
I
I
I
I
I
1
1
I
I
I
1
1
I
1
itre 2 Commande ar mode de lissement
de référence, et l'effet des perturbations agissants su le système. I.a fonction sz.g7z est définie
Par:
sign(s)
-t
1 sJ-S>0 0 s''s=0 -1 sz's<0 (2.1 1 )il est noté que ce caractère discontinue pemet d'assuer une convergence en temps fini ainsi que la robustesse vis-à-vis des peTtuTbations. I.a partie équivalente de la commande we, décrit un mouvement idéal de glissement, c-à-djre sans la prise en considération des incertitudes et
perturi)ations du système. Elle garantit le glissement su la surface pou atteindre l'origine de
phase-Pou le système (2.1) les deux composantes de la commande par mode glissant sont données
Par:
"q=-[gg,r,T'%/(J,
Wd=-Æ[g8(X)]-`S,8m(S)
2.5 Avantages et les inconvénients de ]a commande par mode g]issant
Un des principaux avantages résïdant dans l'uti]isation de la commande par mode glissant est que tout système commandé paT cette technique aura des propriétés implicites de « robustesse », car le système sera contraint à chaque instant à respecter la condition de
glissement [ 14].
En général, on combine cette technique avec des méthodes de commande à
stnicture variable, dans le but de pouvoir définir de manière explicite la robustesse du
système, vïs-à-vis des incertitudes paramétriques du modèle et des perturbations du système.
Quand l'état du système se trouve à la limite du changement de structure, des commutations
successives à fi.équences élevées peuvent se produire. Ce phénomène pouvant produire une sollicitation excessive des actionneurs, est appelé broutement (en anglais « chattering »). Pou certaines applications, le broutement n'est pas accçptable pou deux raisons principales :
• Pou des fféquences de broutement élevées, dans certaïns cas, le système n'est plus
modélisé correctement et peut devenir instable en boucle fermée.
1
1
1
I
I
I
I
1
1
1
1
I
1
1
1
I
I
I
I
1
1
itre 2 Commande ar mode de lissement
• h broutement produit uie dynamique importante su les actionneurs (moteurs), ce qui
peut réduire leurs « temps de vie » et d'être la cause de vibrations dangereuses.
2.6 Le phénomène de réticence problème et solutions
Dans la commande par mode de glissement, l'action discontinue, et à cause d'une fi-équence de commutation (due aux retards de relais et des petites constantes de temps des actiomeurs) le mode glissant idéal n'est pas généré, et des oscillations de haute fi.équence
appamissentautoudupointd'équilibre.Cephénomèneestappeléréticenceoubroutement(ou
bien chattering on anglais) voire figiire (2.7) [ 15]. Une autre cause de chattering, notamment
su la commande, est le bruit de mesure. En effet, me erreu de mesure quand l'état est très proche de la surface de glissement peut entrainer une erreu de signe de la commmde, car il se
peut que cette demière croit alors que le système se trouve de l'autre cote de la surface. Ce phénomène est indésirable car il peut entrainer :
• me détérioration des performances du système (précision, stabilité ,... ).
• l'échauffement des systèmes.
• h fatigue des parties mécanique mobile, pou les systèmes d'entrainement.
Fjgiire 2.6.Phénomène de réticence.
Cette problématique est la plus importante, puisqu'elle reste actuellement l'obstacle principal à 1'essor de la commande par mode de glissement. Dms la littérature, on trouve plusïeurs solutions pour ce problème, on cite :
2.6.1 Solution de la couche Limite
Cette solution, comue aussi sous le nom de" boundary layer solution", consiste à remplacer la
fonction signe par me approximation continue, de type grand gain, uniquement dans un
voisinage de la surface e, Parmi les fonctions utilisées [10], on site :
• la fonction saturation donnée par :
1
I
1
1
I
I
I
I
I
1
1
I
1
1
I
I
I
I
I
1
1
Co-nde
ar mode de lissementFigure 2.7 fonction de satuLration.
(2_14)
Avec Ô I.argeur du seuil de la fonction de saturation.
L'effet de la fonction de satuation est, d'ajouter une couche de limite auteu d'une surface s mais pou quelque systèmes la saturation peut affecter considérablement les perfomances et
pou d'autres, la saturation peut même causer l 'instabilité.
Ce problème de la saturation, peut être évité en utilisant une autre solution au problème de
réticence [ 1 6] .
D'autres fonctions existent telles que les fonctions :
• la fonction tangente hypeïbolique
"s,-tanh(â,
(2.15)Le système ne converge plus veis la valeur désirée, mais veis un voisinage de cette demière dms ce cas, le système est dit en régime pseudo-glissant. Bien que cela permette d'atténuer le phénomènederéticence,laprécisionparrapportàl'objectiffixé,larobustessedelacommande et le temps de réponse s'en trouvent dépréciés.
CetteméthodeestparamétréeparuneconstantepositiveÔrégléepouavoirunboncompromis
entre réduction du chattering et conseNation de la robustesse. Dans les méthodes présentées ici, plus Ô est petiL plus l'approximation tend vers la fonction signe, et donc meilleure est la
robustesse, au détriment de la réduction du chatttering.
2.6.2 So]ution par des modes glissants d'ordre supérieur [17)
Les modes glissants d'ordre supérieu ont été introduits pou pallier au problème du chattering tout en gardmt les propriétés de convergence en temps fini et de robustesse des
commandesparmodesglissantsclassiques.Danscetteapproche,letemiediscontinun'apparaît
I
I
1
1
1
I
I
I
I
I
I
1
1
1
1
I
I
I
I
1
1
Commande ar mode de lissement
plus directement dms l'expression de la commande synflétisée mais dans une de ses dérivées supérieures ce qui a le mérite de réduire.
2.63 Solution par mode glissant dynamique
L: problème de réticence comme déjà parlé est un phénomène indésirable dans la
pratique et peut porter des problèmes par les broutements qui créent dans la commande. Ce
problème possède plusieus solutions pami lesquelles on trouve la commande par mode de
glissement dynamique.
On va appliquer cette solution dans le chapitre suivant.
2.6.4 Solution par système adaptatif flou
En utilisamt le même principe que celui de la couche limite, Lin et Chen ont introduit une bande de transition floue [18]. Le système flou considéré est de type Mamdani, il a la
surface de glissement corme entrée et la commande globale comme sortie. Ia bande de
transition ainsi construite est non linéaire. Les trois règles floues utilisées correspondent à la valeur de la fonction signe. Le phénomène de chattering est certes éliminé néanmoins la commande permettant la phase d.approche reste difficile à calculer, car les bomes des
incertitudes et des pertubations sont généralement incomues. Dans [ 19], l'auteu a proposé
de faire varier le gain de glissement à l'aide d'un système flou. Ainsi, sa valeu diminue au fiir et à mesure que le système s'approche de la surface de glissement. Dans [20,21 ], la partie discontinue de la commande avec saturation a été substituée par un système flou adaptatif. Le
contrôleu a pou entrer la surface de glissement et délivre en sortie la meilleue
approximation de la commande. A l'égard de sa performance, sa convergence dépend de la
valeu initiale de la partie ajustable.
2.7 Conclusion :
Dans ce chapitre on a présenté le principe de la commande par modes glissants. Une telle commande se compose de deux phases :
• I.a concçption d'une hyper surface su laquelle le système doit évoluer.
• Etablissement d'me loi de commande forçant le système à atteindre cette surface de glissement et y demeuer jusqu'à l'équilibre.
Apres la phase de convergence, le système jouit des propriétés suivantes :
• Sa dynamique est entièrement déteminée par la surface de glissement.
• 11 est insensible a" pertubations extérieues ou aux variations des paramètres du
modèle_
1
I
I
1
1
1
I
1
1
1
I
I
1
1
1
I
1
1
I
1
1
itre 2 Commande ar mode de lissement
Le phénomène de broutement, qui réside le problème majeur de cette technique de
commande est définit ainsi quelles que solution pour réduire son effet ou l 'éliminer.
Dans le prochaine chapitre on va appliquer la commande par mode glissant su le
gyroscope dans le but de tester sa robustesse on va introduime des perturbations exteme
ensuite pou résoudre le problème de chattering on va appliquer mode glissant
dynamique.
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
1
1
1
I
1
1
Chapitre 3
Commande par mode glissant d'un
gyroscope vibratoire
1
1
1
I
I
1
1
I
1
1
I
I
I
I
I
I
I
I
I
1
1
itre 3 Commande ar mode issant d'm e vibratoire
3.1 Introduction
Un MEMS gyroscope est un capteu capable de mesuer.la vitesse angulaire pou des
navigations inertielle et les systèmes de guidage de ce fait, il est largement utilisé dans l.es domaine de la mvigation et du positionnement de l'aviation, de l'aérospatiale, de la marine et du véhicule terrestre. Cependant, la présence des erreurs inévitables duant la fabrication et l 'influence.de la température ambïante extérieur entraine une diminution.de la pTécision et de la sensibilité de capteur, des plus, les incertitudes paramétrique.et la perturbation exteme sont
toujous présentes dans un gyroscope pour cette raison, la compensation des défauts de
fabrication et la mesure précise de la vitesse angulaire sont les problèmes principaux de commande d'ui MEMS gyroscope. Où on doit lui associe une commande Tobuste capable de pallier tous les incertitudes et les variations paramétriques qui présent. Im commande par
mode glissant pemet de répondre à ce problème, cçpendant comme le montre le chapitre
précédent, cette T.obustesse se fe'ra au détriment des perfomances. En effet, la discontinuité de l'entrée induit des vibrations haute-fféquences indésirables en pratique.
Dans le but de compenser les imperfections de fibrication et les variations
paramétriques, et afin d'améliorer les perfomances d'un Gyroscope, nous proposons dans ce chapitre, une coinmande par mode glissant qui soit robuste, perfomante et présentant une
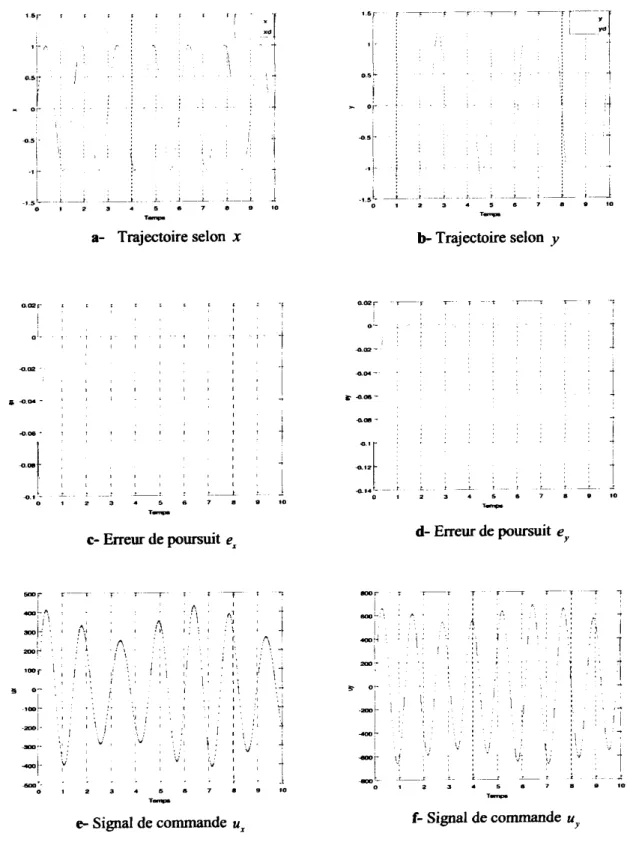
simplicité de mise en œuvre. Nous présentons dans un premier temps, la synthèse d'un contrôleu par mode glissant classique et pou remédieT aux problèmes de réticence nous proposons dans un deuxième lieu. Un nouveau contrôleur par mode glissant. Celui-ci est basé su la mise en œuvre d'une surface de glissement de même ordre que le système. I.a surface ainsi définie frit intervenir une loi de commande particulière, appelée commande dynamique par mode glissant (DMG), la condition de glissement [22] impose une discontinuité sur la dérivée de la commande. En effet, l'intégration lisse la commande discontinue avant son
application su la dynamique du système et donc évite de faire appara^itre ces vibrations
résiduelles indésirables [23]. De plus, elle pemet de ne pas réduire l'ordre du système en boucle femée. Néanmoins, cette méthode présent une complexité de calcule dumnt la synthèse des lois de commande (caLcul des dérivés de phLsieus fonctions), pou simplifier le formalisme de la loi de commande dynamique, nous proposons dans un troisième lieu une commande par mode glissant dynamique simplifier.
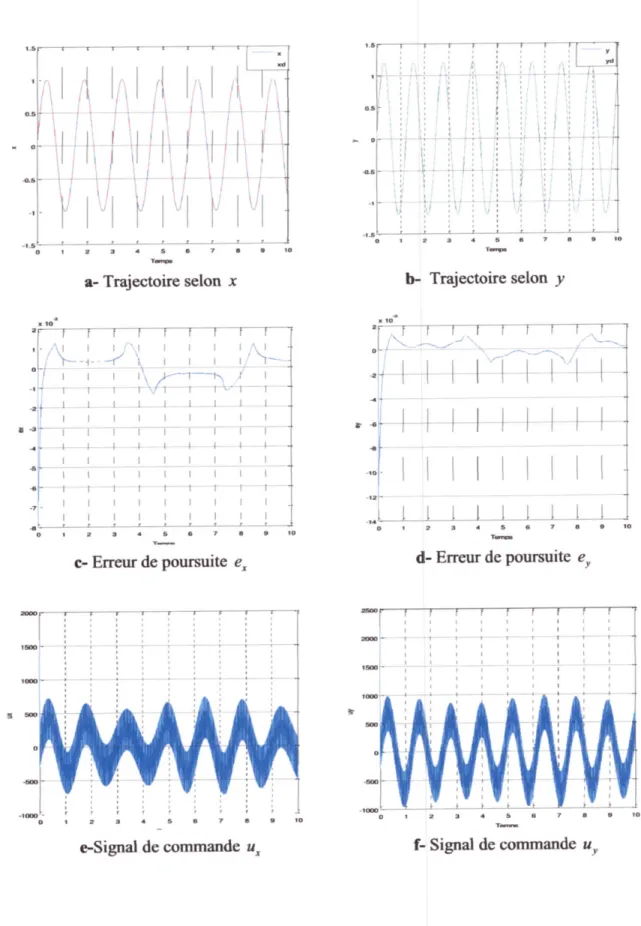
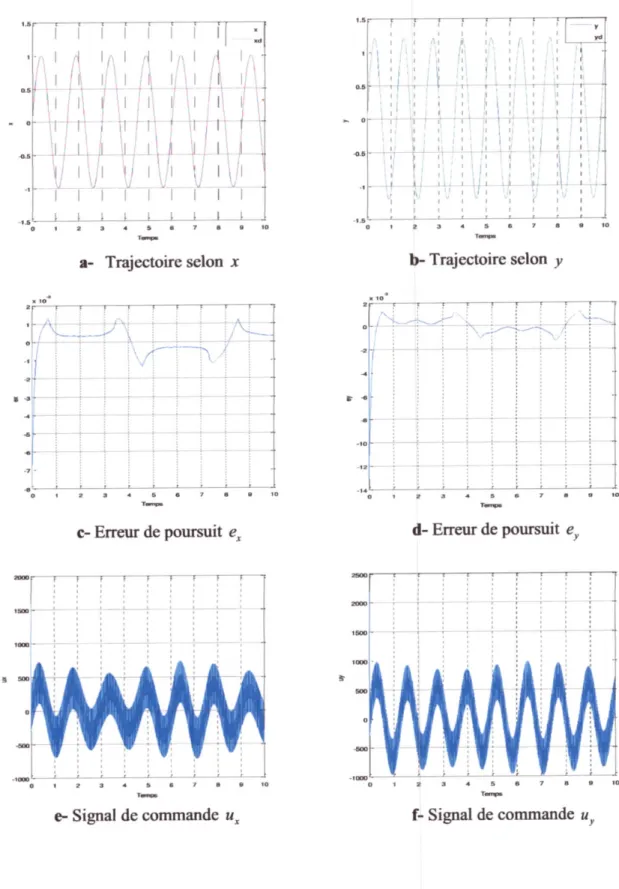
Tous les schémas de commande proposés sont validés par un test de simulation effectué su le model lïnéaire et non linéaïre d'un gyroscope vïbratoire.
1
I
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
I
1
1
ChaDitre 3 Commande Dar mode £lissant d'un gyroscope vibratoire
3.2 Commande par mode glissant d'un gyroscope vibratoire
3.2.1 Synthèse de la commande
Considérant le modèle dynamique du gyroscope (voir chapitre l )
t,::` =Jr2
=f(x,,x2)+n+U (3.1)
7 Ptésente les incertitudes sur le modèle et les perturbations extemes, avec la supposition suivant :
Supposition 3.1
Ch suppose que la perturbation 7 et sa dérivée ¢ sont bomées repectivement par des
constantes positives connues Æ, et¢2 comme suit[13]:
17l < Æ, I¢l < Æ2
Notre objectif est la synthèse d'une loi de commande par mode glissant assurant : • la sortie ;[, = q suit la trajectoire de référence }Jd .
• le système en boucle femé est stable dans le sens que tous les signaux sont bomés.
Afm d'assuer la convergence vers la trajectoire désirée, nous commençons par la définition
de l'eneu de poursuite :
e = ï - yd
On se basmt su (2.4), la surface de glissement, peut s'écrit comme suit :
s -- c e + è
Où c > 0
La dérivée temporelle de la surface est donnée par :
j - Ï, - j;d + cé
S -f +u+v+1l Avec v=-j}d+cé 28 (3.2) (3.3)1
I
I
I
I
1
1
I
1
1
1
I
1
1
1
I
I
I
I
1
1
iùe 3 Commande ar mode issant d'm e vibratoire
Pou garantir l'attractivité de surface et son convergence vers zéro. Une fonction scalaire
positive y puis on fait le choix d'me loi de commande qui fera décroitre cette fonction (i.e. 7 < 0 ), Soit la fonction de Lyapunove suivant :
y-lsrs
2
-_ sT s Sa dérivée temporelle :
On remplaçant (3.5) dans (3.7) on obtient
-sr(/+"+v+„)
(3.6)
(3.7)
(3.8)
m principe de la commande par mode glissant, la loï de commande choisit est la somme
d'me commande équivalente linéarisant et d'un teme discontinue assmnt la convergence et
la stabilité : u--ueq+ud ueq=_f_v_kus
"d - -4 sgn(s)
(3.9) (3.10) (3.11 ) Avec :Æo et Æ, sont deux matrice définie positive.
Remplaçant (3.9), (3.10) et (3.11 ) dans (3.8) : V=-kosTs-k`sTsign(s)+sTri De la supposition (3 . 1 ) 7S-Æosrs-Æ,|s|+4,|s| 7S-Æosrs-(Æ,-;,)|s| (3_12) (3.13) (3.14)
Choisissamt 4 >4, la fonction P est seri défmit négative assure queyet s sont bomés,
selon le lemme de Barbalat [24] s converge asymptotiquement à zéro quant / + œ et selon la définition de la surface de glissement. L'erreur et sa dérive converge asymptotique a zéro.