Simulation de la commande vectorielle par régulateurs à mode glissant d’une chaîne éolienne à base d’une machine asynchrone à double alimentation
Texte intégral
Figure
Outline
Documents relatifs
Ensuite, une stratégie de commande par mode glissant de la génératrice asynchrone à double alimentation permettant un contrôle indépendant des puissances a été
Commande Floue Optimisée d’une Machine Asynchrone à Double Alimentation et à Flux Orienté 4 Le présent travail concerne une étude de la commande floue optimisée sans
Le troisième chapitre, est consacré à la commande d’un système éolien basé sur la machine asynchrone à double alimentation sans balais (BDFIM), nous avons abordé la
Notre travail consiste à parler de la modélisation et la simulation de la commande électrique d'une machine asynchrone à double alimentation dans le cadre de la commande
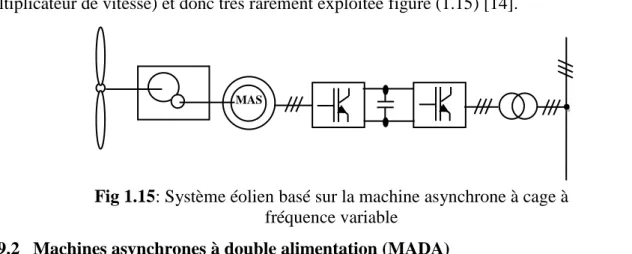
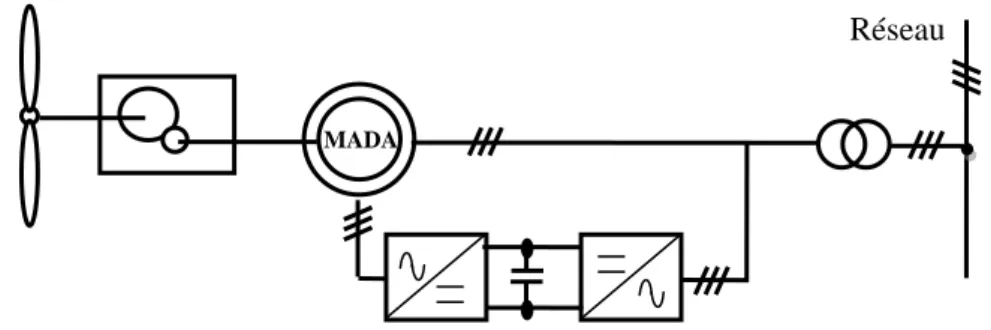
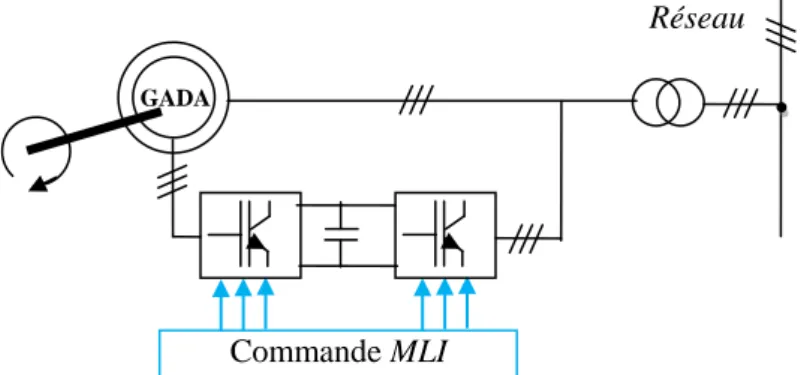
Ce chapitre présente les machines asynchrones et leurs convertisseurs associés, le dispositif basé sur la machine asynchrone à double alimentation propose un bon
Résumé - Le présent travail est consacré à une commande vectorielle de l’énergie active et réactive par les réseaux de neurones d’une machine asynchrone à double alimentation
Un nouvel algorithme de contrôle de la commande vectorielle de la machine asynchrone sans balais à double alimentation (BDFM) a été développé par Poza avec les
Commande Directe des Puissances d’une Machine Asynchrone à Double Alimentation Intégré dans un Système Éolien Connecté
