ازو
ةر
عتلا
ـ
يل
ـــ
مـ
يـــلاعلا
و
ثـــحبـلا
يـــــــــمـلعلا
MINISTERE DE L’ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE
عماج
ــ
ـيطس ةـ
ــ
فـ
1
UNIVERSITE de SETIF
1
ايجولونكتلا ةيلك
Faculté de Technologie
Mémoire de Magistère
Présenté au département d’Electrotechnique
Pour obtenir le diplôme
De Magistère En Electrotechnique
Option :
Réseaux électriques
Par :
M. HAMADOU Zakaria
Thème
Optimisation des paramètres d’un FACTS shunt pour l’amélioration de
la stabilité transitoire d’un système électrique
Soutenu le
20 Juin 2012
devant la commission d’examen composée de :
M. BAYADI Abdelhafid Professeur à l’Université de Sétif-1 Président
M. GHERBI Ahmed Professeur à l’Université de Sétif-1 Directeur de mémoire
M. BOUKTIR Tarek Professeur à l’Université de Sétif-1 Examinateur
Je dédie ce modeste travail :
À ma mère, à ma mère, à ma mère, à mon père,
à mes grandes mères, A mes très chers frères, à ma sœur
Remerciements
Je tiens à remercier en tout premier lieu Pr. Ahmed GHERBI, Directeur de ce mémoire, qui m’a constamment guidé avec ses multiples directives et ses conseils précieux pour contribuer à la réussite de ce travail, je tiens à lui remercier pour sa disponibilité tout au long de ce travail.
Je remercie également tous les membres du jury :
Pr. BAYADI Abdelhafid
Pr. BOUKTIR Tarek
Dr. RADJEAI Hamoud Qui ont accepté de juger ce travail.
Mon remerciement aussi au département de l’électrotechnique de l’université de Sétif et à tous les enseignants qui ont contribué à ma formation.
Je suis redevable à tous ceux qui m’ont aidé de prés ou de loin pour mener à bien ce travail. Sétif, le / /2012 HAMADOU Zakaria
Sommaire
I
NTRODUCTIONG
ENERALE...
IChapitre 01 ... 1
STABILITE DES RESEAUX ELECTRIQUES
... 1
1.1. Introduction ... 1
1.2. Classification de la stabilité ... 1
1.3. Méthodes d’évaluation de la stabilité transitoire ... 9
1.4. Méthodes d’amélioration de la stabilité transitoire ... 11
1.5. Conclusion ... 18
Chapitre 02 ... 20
ETUDE DES DISPOSITIFS
FACTS ...20
2.1. Introduction ... 20
2.2. Concepts de base et définitions ... 20
2.3. Nécessité des dispositifs FACTS ... 20
2.4. Classification des systèmes FACTS ... 21
2.5. Apports et avantages des dispositifs FACTS ... 29
2.6. Coût des dispositifs FACTS ... 30
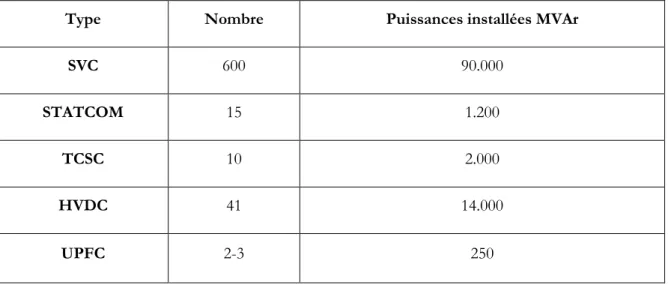
2.7. Dispositifs FACTS en exploitation ... 30
2.8. Applications pratiques des dispositifs FACTS. ... 32
2.9. Réglage des paramètres des contrôleurs FACTS (état de l’art) ... 33
2.10. Conclusion ... 36
Chapitre 03 ... 37
ETUDE ET MODELISATION DU
SVC ...37
3.1. Introduction ... 37
3.2. Principe général de fonctionnement du SVC ... 37
3.3. Constitution du SVC ... 38
3.4. Modélisation du SVC ... 41
3.6. Conclusion ... 51
Chapitre 04 ... 52
A
PPLICATIONS ET RESULTATS DE SIMULATIONS...52
4.1. Introduction ... 52
4.2. Formulation du problème d’optimisation ... 52
4.3. Optimisation par Simulink Design Optimization ... 53
4.4. Application sur un système de transport mono-machine ... 55
4.5. Applications sur un système de transport multi machines ... 62
4.6. Conclusion ... 70
Liste des figures
Figure 1.1. Classification de la stabilité des réseaux de puissances ... 2
Figure 1.2. Tracé de l’angle rotorique en fonction du temps ... 5
Figure 1.3. Générateur synchrone connecte à un jeu de barres infini ... 6
Figure 1.4. Courbe ... 8
Figure 1.5. Variation temporelle d’angle rotorique ... 8
Figure 1.6. Influence de la puissance active sur la marge de la stabilité ... 12
Figure 1.7. Description schématique des couples et puissances dans la machine synchrone ... 14
Figure 1.8. Description schématiques d’une chaine de production ... 14
Figure 1.9. Modèle de la turbine et du gouverneur ... 15
Figure 1.10. Structure générale d’un système d’excitation statique avec AVR ... 15
Figure 1.11. Modèle simplifié du système d’excitation ... 16
Figure 1.12. Modèle simplifié de la liaison entre PSS et le système ... 17
Figure 1.13. Modèle d’un PSS type avance de phase ... 17
Figure 2.1. Structure du TCSC ... 21
Figure 2.2. Structure du TCSR ... 23
Figure 2.3. Compensateur synchrone statique série ... 23
Figure 2.4. Structure du SVC ... 25
Figure 2.5. La caractéristique V-I du SVC ... 26
Figure 2.6. Structure du STATCOM ... 26
Figure 2.7. Structure du TCPAR ... 28
Figure 2.8. Structure de l’UPFC ... 29
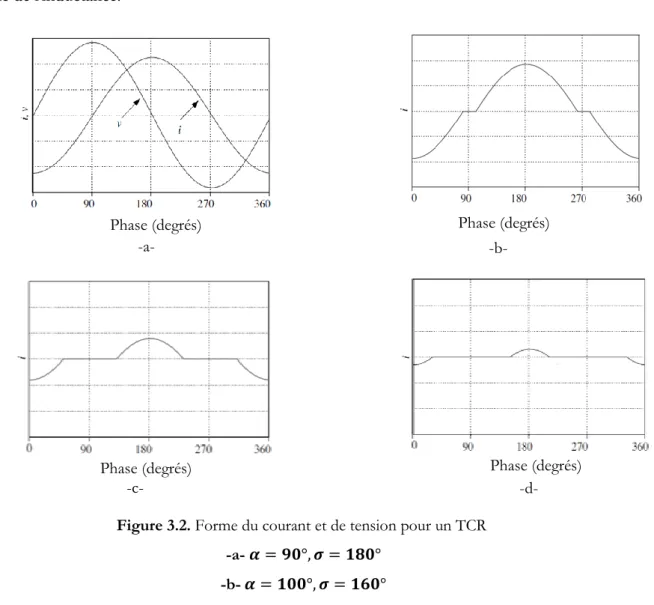
Figure 3.1. Réactance commandée par thyristors ... 38
Figure 3.2. Forme du courant et de tension pour un TCR ... 39
Figure 3.3. Condensateur commutée par thyristors... 40
Figure 3.4. Modélisation du SVC ... 41
Figure 3.5. SVC placé dans un nœud ... 42
Figure 3.6. SVC placé au milieu d’une ligne ... 42
Figure 3.7. Transformation à une ligne équivalente avec SVC ... 43
Figure 3.8. Représentation schématique du système de contrôle d’un SVC ... 44
Figure 3.9. Structure du contrôleur auxiliaire du SVC ... 45
Figure 3.10. Schéma synoptiques du réseau étudié ... 45
Figure 3.11. Courbes pour différentes valeurs de ... 46
Figure 3.12. Schéma unifilaire du SMIB avec SVC au milieu de la ligne ... 47
Figure 3.13.Variation de la puissance active de la ligne compensée et non compensée ... 48
Figure 4.1.Procédure d’optimisation ... 53
Figure 4.2. Représentation du réseau SMIB... 55
Figure 4.3. Représentation du réseau test sur MATLAB/Simulink ... 55
Figure 4.4. Procédure de la méthode proposée ... 56
Figure 4.5. Evolution de l’angle rotorique pour un défaut triphasé ... 57
Figure 4.6. Variation de la déviation de la vitesse du rotor pour un défaut triphasé ... 58
Figure 4.7. Variation de la puissance active de la ligne ... 58
Figure 4.8.Variation de puissance active du générateur ... 58
Figure 4.9. Evolution de l’angle rotorique pour un défaut monophasé ... 59
Figure 4.10. Évolution de la déviation de la vitesse du rotor pour un défaut monophasé ... 59
Figure 4.11. Variation de la puissance active de la ligne pour un défaut monophasé ... 60
Figure 4.12. Variation de la puissance active délivrée pour un défaut monophasé ... 60
Figure 4.13. Evolution de l’angle rotorique pour un défaut de perte d’une ligne ... 61
Figure 4.14. Évolution de la déviation de la vitesse du rotor pour un défaut de perte d’une ligne ... 61
Figure 4.15. Variation de la puissance active de la ligne pour un défaut de perte d’une ligne ... 61
Figure 4.16. Variation de la puissance active délivrée pour un défaut de perte de ligne ... 62
Figure 4.17. Représentation du réseau à trois machines ... 63
Figure 4.18. Représentation du réseau à trois machines sur Simulink ... 63
Figure 4.19. Différence d’angle de charge entre G1 et G3 (mode interrégional) ... 65
Figure 4.20. Différence d’angle de transport entre G2 et G3 (mode interrégional) ... 65
Figure 4.21. Différence de vitesses de rotation des machines G2 et G3 (mode interrégional) ... 66
Figure 4.22. Différence de vitesses de rotation des machines G1 et G2 (mode local) ... 66
Figure 4.23. Différence de vitesses de rotation des machines G1 et G3 (mode interrégional) ... 66
Figure 4.24. pour un défaut monophasé (mode interrégional) ... 67
Figure 4.25. pour un défaut monophasé (mode interrégional) ... 67
Figure 4.26. pour un défaut monophasé (mode local) ... 68
Figure 4.27. pour un défaut monophasé (mode interrégional) ... 68
Figure 4.28. pour un défaut monophasé (mode interrégional) ... 68
Figure 4.29. pour un défaut d’ouverture de ligne (mode interrégional) ... 69
Figure 4.30. pour un défaut d’ouverture de ligne (mode interrégional) ... 69
Figure 4.31. pour un défaut d’ouverture de ligne (mode interrégional) ... 70
Liste des tableaux
Tableau 2.1. Statistiques des dispositifs FACTS autour du monde. ... 32
Tableau 4.1. Résultats d’optimisation (système mono machine) ... 57
Tableau 4.2. État du réseau pout différentes durée de défaut... 64
Listes des Acronymes et Symboles
Acronymes
FACTS Flexible AC Transmission System PSS
CCT EAC PSS IEEE
Power System Stabilizer Critical Clearing Time Equal Area Criterion Power System Stabilizer
Institute of Electrical and Electronics Engineering EPRI Electric Power Research Institute
GTO IGBT LTC
Gate Turn Off
Insulated Gate Bipolar Transistor Load Tap Changer
DC Direct Current
AC Alternative Current
SVC Static Var Compensator
TCSC Thyristor Controlled Series Capacitor TSC Thyristor Switched Capacitor
TCR Thyristor Controlled Reactor STATCOM Static Compensator
MOV
ASC Metal Oxide Varistor Advanced Series Capacitor
TCSR Thyristor Controlled Series Reactor SSSC Static Synchronous Series Compensator TCPAR Thyristor Controlled Phase Angle Regulator UPFC WAPA TVA AEP PSO SDO
Unified Power Flow Controller Western Area Power Administration Tennessee Valley Authority
American Electric Power Particles Swarm Optimization Simulink Design Optimization
Symboles
:Tension au jeu de barres infini Puissance d’accélération Puissance mécanique Puissance électrique Pulsation de référence Réactance totale du réseau Réactance du TCSC Puissance active du SVC Susceptance du SVC Puissance réactive du SVC
i
I
NTRODUCTION
G
ENERALE
L'industrialisation et la croissance de la population sont les premiers facteurs pour lesquels la consommation de l'énergie électrique augmente régulièrement. Ainsi, pour avoir un équilibre entre la production et la consommation, il est à première vue nécessaire d'augmenter le nombre de centrales électriques, de lignes, de transformateurs etc., ce qui implique une augmentation de coût et une dégradation du milieu naturel. En conséquence, il est aujourd'hui important d'avoir des réseaux maillés et de travailler proche des limites de stabilité afin de satisfaire ces nouvelles exigences.
Ces nouvelles exigences imposent aux compagnies d’électricité et notamment les entreprises de transport de fonctionner autour de leurs limites de stabilité, et ce dû au nouvel environnement dérégulé et l’ouverture du marché d’électricité. Ceci impose l’augmentation du nombre de schémas d’exploitation, et en conséquence la génération de multiples modes d’oscillation interzone pouvant conduire à la défaillance des infrastructures du réseau (en effet, ce phénomène est accompagné d’un fort transit de puissance oscillante), pouvant entrainer des Blackouts, comme c’était le cas en Algérie le 03 février 2003.
Pour faire face à ce phénomène néfaste, les stabilisateurs de puissance PSS (Power System Stabilizers) implantés depuis les années 60, ne peuvent assurer seuls l’amortissement de ces oscillations. Des nouveaux dispositifs appelés FACTS (Flexibles AC Transmission Systems), sont placés dans le réseau, qui ont bénéficié de l’évolution de la technologie de l’électronique de puissance. Ces dispositifs sont insérés dans un réseau électrique pour satisfaire plusieurs besoins, tels que la répartition des puissances, la compensation de la puissance réactive, et le renforcement de la stabilité des réseaux électriques. La nouvelle architecture des réseaux électriques ouvre des nouveaux axes de recherche. Le dimensionnement des systèmes FACTS fait l’objet de plusieurs travaux de recherche.
Le but de ce travail est d’améliorer la stabilité transitoire des systèmes de puissance en assurant un amortissement des oscillations des modes interrégionaux aussi bien que des modes locaux. Pour atteindre cet objectif, nous proposons une coordination de réglage optimal d’un dispositif FACTS shunt (SVC) avec un PSS. Ceci permet d’assurer un amortissement satisfaisant des oscillations rotoriques et de garantir la stabilité transitoire du système. Nous avons donc proposé une fonction
objective basée sur la minimisation des déviations des vitesses des générateurs, la méthode du Gradient est proposée pour optimiser notre fonction objective.
Les résultats de simulations obtenus pour un réseau mono machine ont été comparés avec ceux obtenus par un dispositif série. Afin de vérifier la performance de la méthode proposée, un réseau multi machine a été considéré, comprenant trois générateurs situés dans deux zones différentes. La stabilité transitoire a été améliorée par amortissement des oscillations locales et interrégionales.
La rédaction de ce mémoire est structurée comme suit :
Un rappel sur la stabilité des réseaux électriques est abordé au premier chapitre. Les différentes méthodes d’évaluation de la stabilité transitoire ont été citées. Un aperçu sur les différentes méthodes d’amélioration de la stabilité transitoire a été présenté en fin de chapitre.
Dans le deuxième chapitre, on présente des concepts de base sur les dispositifs FACTS, leurs nécessités d'application dans les réseaux électriques et leurs différentes structures de base, puis on présente quelques ouvrages comprenant des dispositifs FACTS autour du monde, et on discute l’avantage apporté par ces dispositifs au réseau électrique.
Une étude détaillée du SVC a été abordée au troisième chapitre, nous avons présenté son principe de fonctionnement, ses différentes constitutions, son modèle et ses multiples applications à savoir la stabilité de tension, la stabilité dynamique et transitoire.
Le quatrième chapitre est consacré aux simulations. Deux réseaux tests ont été étudiés afin de montrer l’apport de l’optimisation simultanée des SVC et PSS sur la stabilité transitoire.
Chapitre 01
S
TABILITE
D
ES
R
ESEAUX
E
LECTRIQUES
1.1. Introduction
L’accroissement énorme de la demande de l’énergie électrique et les contraintes économiques de construire de nouveaux ouvrages conduisent à l’exploitation des réseaux électriques prés de leurs limites de stabilité et de sécurité. En effet, l’instabilité des réseaux électriques présente un problème majeur dans le bon fonctionnement de ces derniers autour du monde. Les perturbations inévitables telles que les courts circuits, les indisponibilités momentanées des lignes de transmission, des générateurs, les transformateurs ainsi que les pertes dans les lignes peuvent affecter le réseau électrique à tout instant et l’amener en dehors de sa zone de stabilité. La stabilité d’un réseau électrique est donc la propriété qui lui permet de rester dans un état d’équilibre, pour des conditions de fonctionnement normales, et de retrouver un état d’équilibre acceptable, suite à une perturbation [1].
1.2. Classification de la stabilité
Les diverses formes de l’instabilité résultantes ne peuvent pas être correctement compris et efficacement traitées en même temps. En raison de la dimensionnalité élevée et la complexité des problèmes de la stabilité, la classification aide à produire une simplification des conditions, pour analyser des types spécifiques, en employant un degré approprié de détail pour la représentation du système et des techniques analytiques. L’analyse de la stabilité, y compris l’identification des facteurs principaux qui contribuent à l’instabilité, est considérablement facilitée par une classification de la stabilité. La classification est, donc, essentielle pour une analyse pratique significative et une résolution des problèmes de la stabilité des réseaux électriques.
La classification de la stabilité proposée ici est basée sur la nature physique de l’instabilité, la plage de temps des phénomènes et l’amplitude des perturbations. On peut donc classifier les types de la stabilité comme suit [2]:
Figure 1.1. Classification de la stabilité des réseaux de puissances 1.2.1. Stabilité de tension
La stabilité de tension est la capacité d’un réseau électrique de maintenir la tension de fonctionnement normal dans les limites admissibles à tous les jeux de barres, après avoir été soumis à une perturbation, pour une condition de fonctionnement initiale donnée [3]. Le facteur principal qui cause l’instabilité est l’inaptitude du système électrique de satisfaire la demande de la puissance réactive [4]. L’instabilité résultante peut se produire sous forme de chute progressive ou élévation de la tension de quelques jeux de barres [5]. Les résultats possibles de l’instabilité de tension sont la perte de la charge dans un secteur, ou déclenchement des lignes de transmission et même d’autres éléments, par leurs systèmes de protection à des pannes en cascades. Il est démontré que la majorité des blackouts sont causes par l’instabilité de tension [5]. Plusieurs changements dans le système de puissance peuvent contribuer à l’instabilité de tension, ce sont par exemple [6]:
- une augmentation de charge :
- des générateurs, des condensateurs synchrones, ou des SVCs (Static Var Compensator systems) qui atteignent les limites de puissance réactive :
- une panne de générateur, une perte d’une charge importante ou un déclenchement de ligne : - une perte d’une source de puissance réactive (condensateurs, machines synchrones,...). Stabilité aux
petites perturbations
Stabilité du system de puissance
Stabilité angulaire Stabilité de fréquence Stabilité de tension
Stabilité aux grandes perturbations Court terme Stabilité aux petites perturbations Stabilité aux grandes perturbations Stabilité transitoire Stabilité dynamique Court
terme terme Long Court
La plupart de ces changements ont des effets significatifs sur la production, la consommation et la transmission de puissance réactive, ainsi sur la stabilité de tension. Par conséquent, des mesures peuvent être utilisées pour améliorer la stabilité de tension, tels que:
- un contrôle automatique des condensateurs shunts ; - un blocage des régleurs en charge automatique ; - une nouvelle répartition de la génération ;
- une replanification du fonctionnement des générateurs et des nœuds de commande ; - une régulation de tension secondaire ;
- un plan de délestage.
Il est important de noter que l’instabilité de tension ne se produit pas toujours toute seule. Souvent, l’instabilité de tension et l’instabilité de l’angle de rotor se produisent ensemble, l’une pouvant entraîner l’autre. Selon l’amplitude de la perturbation, on distingue la stabilité de tension de petites perturbations et celle de grandes perturbations.
1.2.1.1. Stabilité de tension vis-à-vis des petites perturbations
La stabilité de tension de petites perturbations concerne la capacité du réseau électrique à maintenir la tension dans les limites permises en présence de perturbations telles que : une variation faible de la charge, de la production,…etc.
1.2.1.2. Stabilité de tension vis-à-vis des grandes perturbations
Elle est définie comme étant la capacité du réseau électrique à maintenir les tensions des nœuds dans les limites de fonctionnement permises en présence des grandes perturbations à savoir la perte d’équipement de transport ou de production, le court-circuit,…etc.
1.2.2. Stabilité de fréquence
C’est la capacité d’un réseau électrique à maintenir la fréquence dans les limites admissibles, suite à une perturbation grave dans le réseau. Cette perturbation résulte d’un déséquilibre significatif entre la production et la charge. Cette stabilité dépend des capacités de maintenir ou restaurer l’équilibre entre la production et la charge, avec une perte minimale involontaire de la charge [3]. L’instabilité résultante se produit sous forme d’oscillations de la fréquence soutenue, menant au déclenchement des unités de production et/ou des charges pendant les variations de la fréquence. Le temps qui caractérise les processus et les dispositifs actifs, s’étend de la fraction de secondes à plusieurs minutes. Par conséquent, la stabilité de la fréquence peut être un phénomène à court ou à long terme [7].
1.2.3. Stabilité angulaire
Quand le système est perturbé, la puissance électrique de la machine varie rapidement, mais la variation de puissance mécanique fournie à la machine est relativement lente. En raison de cette différence de vitesse de réponse, un écart temporaire d’équilibre de puissance a lieu. Par conséquent, ce déséquilibre de puissance entraîne une variation des couples agissant sur le rotor. Ceci entraîne une accélération ou décélération du rotor selon le sens du déséquilibre, en entraînant une perte de synchronisme du générateur avec le reste du système. Si l’équilibre de puissance n’est pas rétabli, la machine est mise hors service par une protection de survitesse ou de perte de synchronisme, et la stabilité du système est mise en danger [6]. Suite à une perturbation, le facteur principal qui détermine l’évolution de l’état du système est l’écart entre les angles de rotor. Nous pouvons dire que les angles de rotor d’un système de puissance peuvent évaluer selon deux scénarios :
- Soit, les angles de rotor s’accroissent ensemble et oscillent à l’unisson. Ils peuvent éventuellement atteindre de nouvelles valeurs stables. Tant que les écarts entre les angles de rotor restent constants, le système reste stable et il demeure au synchronisme.
- Soit, un ou plusieurs angles du rotor s’accroissent plus rapidement que les autres. Alors, les écarts entre les angles de rotor divergent dans le temps. Le système devient par conséquent instable et il perd le synchronisme.
La stabilité angulaire, ou stabilité d’angle rotorique, se rapporte aux capacités des machines synchrones d’un réseau électrique interconnecté à rester dans le synchronisme après avoir été soumis à une perturbation [5]. Elle dépend de la capacité de maintenir ou restaurer l’équilibre entre le couple mécanique et le couple électromagnétique de chaque machine synchrone [7]. L’instabilité, qui peut résulter, se produit sous forme d’augmentation d’oscillation angulaire de quelques générateurs menant à leur perte du synchronisme avec d’autres générateurs.
Selon l’amplitude de la perturbation, on parle de la stabilité angulaire aux petites perturbations ou de la stabilité transitoire.
1.2.3.1. Stabilité angulaire aux petites perturbations
La stabilité angulaire aux petites perturbations (stabilité dynamique) concerne la capacité du système à maintenir le synchronisme en présence de petites perturbations comme : une petite variation de la charge ou de génération, manœuvre d’équipement, etc. L’instabilité résultante se manifeste sous forme d’un écart croissant, oscillatoire ou non-oscillatoire, entre les angles de rotor [5].
système ou sur sa charge,… [6]. L’analyse d’un tel système peut être accomplie par la linéarisation du système d’équations différentielles non linéaires. La stabilité du système peut être évaluée par l’analyse des valeurs propres de la matrice d’état du système [4, 5, 8].
1.2.3.2. Stabilité transitoire
La stabilité transitoire reste toujours une considération de base et d’une grande importance dans le design et le fonctionnement du réseau électrique. Elle se rapporte à l`aptitude du système électrique de retrouver une position d’équilibre stable après une perturbation brusque et de forte amplitude. Cette perturbation peut écarter notablement le réseau de sa position initiale. La réponse du système implique de grandes variations des angles rotoriques. La stabilité transitoire dépend de la relation non-linéaire couples- angles. Le phénomène de la stabilité transitoire concerne les grandes perturbations telles que [1, 9, 10];
Les courts-circuits affectant un élément du réseau, notamment aux bornes des machines ;
La perte d’un ouvrage (e.g. une ligne de transmission…) ;
La perte d’un groupe de production.
Les conséquences de ces défauts peuvent être très graves, pouvant même conduire à l’effondrement total du réseau. Si l’instabilité se manifeste directement suite à la perturbation (plus précisément dans la première seconde qui suit l’élimination du défaut), elle est appelée instabilité de première oscillation (en anglais First Swing Instability), (cas 1, figure 1.2), et elle s’étend sur 3 à 5 secondes. Elle peut résulter de la superposition des effets de plusieurs modes d’oscillation lents excités par la perturbation, provoquant ainsi une variation importante de l’angle de rotor au-delà de la première oscillation (instabilité de multi oscillations), (cas 2, figure 1.2). La gamme de temps associée s’étend de 10 à 20 secondes [6].
a- Stable b- instable
Cas1 instabilité de première oscillation
Cas2 instabilité de plusieurs oscillations
Figure 1.2. Tracé de l’angle rotorique en fonction du temps t(s) δ δ0 Cas1 δ δ0 t(s) Cas2
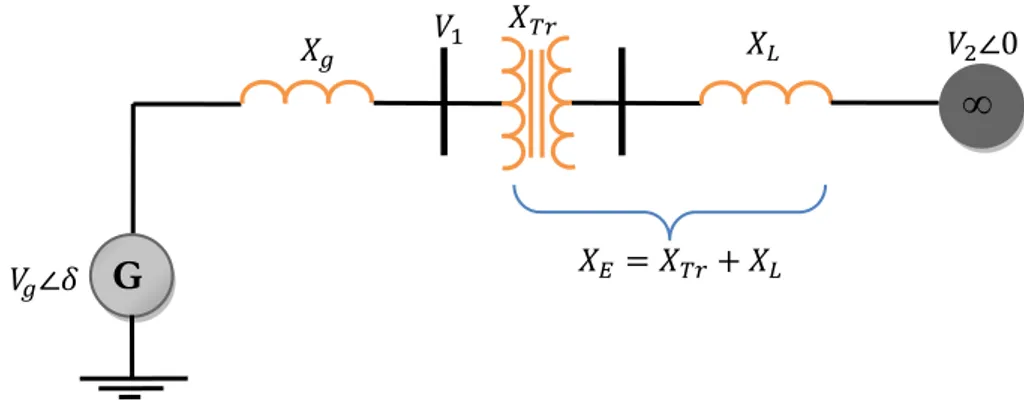
Le concept de stabilité transitoire peut être expliqué par une approche graphique simple, à savoir le critère des aires égales (Equal Area Criterion). Cette approche regroupe l’équation du mouvement et la courbe traditionnelle représentant la relation entre la puissance produite par le générateur et l’angle de rotor. Pour expliquer cette approche, nous prenons un système de puissance simple constitué d’un générateur synchrone connecté à un jeu de barres infini via une ligne de transmission, (figure 1.3). Le générateur est modélisé par une source de tension idéale en série avec une réactance (modèle classique). La ligne et le transformateur sont représentés par la réactance [6, 11].
Figure 1.3. Générateur synchrone connecte à un jeu de barres infini
Dans l’état équilibré, la puissance produite par le générateur est donnée par l’équation suivante :
(1.1)
Le mouvement du rotor, qui obéit à la deuxième loi de Newton, est décrit par l’équation différentielle suivante :
(1.2)
Moment d’inertie totale de la machine synchrone [kg.m2] ;
Angle mécanique du rotor en [rad] ;
Couple mécanique de la turbine ou la charge [N.m] ; Couple électrique du rotor [N.m].
Si l’équation (1.2) est multipliée par le terme de la pulsation angulaire mécanique, on obtient : (1.3)
G
∞
: La puissance mécanique exercée sur le rotor [W] ; : La puissance électrique exercée sur le rotor [W].
Si l’accélération angulaire est exprimée en angle électrique, au lieu de l’équation (1.3) on aura :
(1.4)
Où est le nombre de pôles. Avec un réarrangement de la partie gauche de l’équation (1.4) on aura :
(1.5)
L’utilisation de la relation nous donne:
(1.6)
Comme :
(1.7)
On obtient alors :
(1.8)
Donc l’équation du mouvement est décrite comme suit :
(1.9)
Avec ;
: Puissance d’accélération [Pu]; : Puissance électrique [Pu]; : Puissance mécanique [Pu]; : Angle interne de la machine [rad]; : Constante d’inertie [Pu];
: Pulsation de référence.
L’équation (1.1) peut être écrite comme suit :
(1.10)
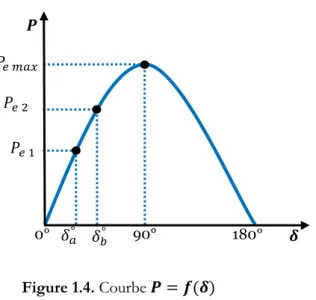
Figure 1.4. Courbe
Lors de l’équilibre, la puissance électrique est égale à la puissance mécanique appliquée pour
l’angle correspondant . Un brusque changement sur la charge du générateur entraîne une variation de la puissance mécanique, et par conséquent, de la puissance électrique, par exemple de à ,
figure1.4. Le rotor va donc accélérer de sorte que l’angle de puissance augmente, de à , pour pouvoir fournir une puissance supplémentaire à la charge. Cependant, l’accélération du rotor ne peut pas s’arrêter instantanément. Ainsi, bien que la puissance développée pour l’angle soit suffisante
pour la charge, le rotor va dépasser l’angle jusqu’à ce qu’un couple opposé suffisant soit développé
pour arrêter cette accélération. L’énergie supplémentaire va entraîner le ralentissement du rotor et la diminution de l’angle de puissance. Suivant l’inertie et l’amortissement du système, les oscillations de l’angle de rotor résultant vont ou s’amortir, et la machine restera stable (cas 1, figure1.5), ou diverger, et la machine deviendra instable en perdant le synchronisme avec le système (cas 2, figure 1,5).
Figure 1.5. Variation temporelle d’angle rotorique Cas 2 Cas 1 t(s) 0° 90° 180°
1.3. Méthodes d’évaluation de la stabilité transitoire
Ces dernières années, la stabilité transitoire est devenue plus critique, à cause de l’interconnexion, l’accroissement énorme de la demande et les contraintes économiques de construire des nouvelles centrales de production et des nouvelles lignes de transmission. Tous ces facteurs conduisent à l’exploitation des réseaux électriques prés de leurs limites de stabilité, ce qui donne une importance capitale à l’évaluation de la stabilité transitoire en temps réel [12]. A cause de la forte non-linéarité une étude analytique rigoureuse n’est guère possible, la résolution nécessiterait la prise en compte d’un grand nombre des paramètres. Plusieurs de méthodes d’évaluation ont été développées. Elles peuvent être classées en trois familles ;
Méthodes d’intégration numériques ;
Méthodes directes (ou énergétiques);
Méthodes hybrides.
On va se limiter dans ce mémoire de donner un aperçu général de ces méthodes:
1.3.1. Méthodes d’intégration numériques
Ces méthodes évaluent la robustesse du réseau vis-à-vis de grandes perturbations en déterminant son évolution temporelle par résolution, pas à pas, de l’ensemble des équations integro-différentielles non linéaires qui gouvernent les phénomènes de stabilité transitoire, en donnant l’évolution des angles de rotor en fonction du temps, généralement, les méthodes implicites d’intégration numériques sont utilisées pour résoudre l’ensemble d’équations (e.g la méthode trapézoïdale). L’évaluation comporte deux phases : la phase pendant défaut caractérisée par une marge de temps très courte (de l’ordre de 100ms), et la phase après élimination de défaut qui peut s’étendre à quelque secondes (généralement, un system qui na pas perd le synchronisme après quelques secondes, est considéré stable) [1, 9]. Souvent, on évalue la stabilité:
- Soit on cherche à savoir si le system perd le synchronisme pour un temps d’élimination de défaut donné .
- Soit on évalue la limite de stabilité par le temps critique d’élimination de défaut CCT (Critical Clearing Time).
Pour détecter la conservation de stabilité, il faut juste vérifier que les angles du rotor des différentes machines s’évoluent dans une marge de valeurs spécifiques durant la simulation [8].
1.3.1.1. Avantages des méthodes d’intégration numériques
Fournir des informations importantes sur les phénomènes transitoires, en particulier sur le comportement de leurs paramètres saillants et l’évolution temporelle du system (angles des rotors, vitesses, puissance.etc);
Peut s’accommoder à n’importe quelle modélisation (quelque soit le nombre des équations différentielles qui représente l’équipement), et n’importe quel scénario de stabilité (type de contingence, séquence d’évènements) ;
Peut atteindre le degré de précision requise, sous l’hypothèse d’une bonne modélisation et de valeurs correctes des paramètres du system [1].
1.3.1.2. Inconvénients des méthodes d’intégration numériques
Ne fournit pas de marge de stabilité pouvant renseigner à quelle distance le système se trouve à l’instabilité et pouvant faciliter le calcul de sensibilité.
Ne fournit pas d’outils efficaces de commande, c’est à dire de stabilisation de scénario instable [9].
Finalement, il est très important de remarquer que les progrès spectaculaires réalisés sans cesse dans le domaine des ordinateurs ont contribués à rendre les méthodes d’intégration numériques bien plus rapides qu’à leurs débuts : des simulations nécessitant une heure de temps il y a à peine une vingtaine d’années ne demandent plus que quelques secondes [1].
1.3.2. Méthodes directes
Les inconvénients des méthodes temporelles précités ont motivés le développement des méthodes non conventionnelles, en particulier, des méthodes directes basées sur le critère de stabilité de Lyapunov dont les tout premiers travaux remontent à 1947 et 1958 (même s’ils n’appliquent pas à la lettre la théorie générale de Lyapunov mais bien le concept énergétique, qui en est un cas particulier) [1]. Contrairement aux méthodes de simulations, les méthodes directes évaluent la stabilité transitoire en évitant de faire recours à la résolution des équations différentielles. La méthode des aires égales est la méthode la plus utilisée pour évaluer la stabilité transitoire d’un system mono machine reliée à un jeu de barres infini, les résultats d’application de cette méthode est l’angle critique du générateur [13].
1.3.2.1. Avantages des méthodes directes
La rapidité (le temps de calcul court) ;
1.3.2.2. Inconvénients des méthodes directes
Ces méthodes ne permettent pas de considérer un system de grande taille ;
Une limitation dans la modélisation du réseau ;
Ne fournit pas les réponses temporelles de tous les paramètres du réseau [12].
1.3.3. Méthodes hybrides
Les méthodes hybrides surmontent les deux limitations des méthodes directes comme suit :
L’estimation du problème de stabilité peut être abordée en considérant un système mono machine ou un système à deux machines équivalent du système multi machines ;
Le problème de modélisation peut être résolu en incluant la fonction de Lyapunov calculée par les méthodes d’intégration numériques [8].
La méthode dite SIME (SIngle Machine Equivalent), est souvent utilisée pour évaluer la stabilité transitoire, c’est une méthode hybride résultant de la combinaison de la méthode d’intégration temporelle pas à pas appliquée au système multi machine à l’étude, et le critère d’égalité des aires appliqué sur le système mono machine équivalent. Cette combinaison fournit deux informations essentielles sur la stabilité transitoire, à savoir [1, 8]:
L’identification des machines critiques (responsables de la rupture éventuelle du synchronisme) ;
Evaluation de la marge de la stabilité.
1.4. Méthodes d’amélioration de la stabilité transitoire
En vue de son importance dans la planification, la conception et l’exploitation des réseaux d’énergie électrique, l’amélioration de la stabilité transitoire reste un défit majeur pour les ingénieurs pour éviter tous événement qui peut conduire vers un black out [7]. Les solutions envisageables d’amélioration de la stabilité transitoire se basent sur [7, 14]:
1.4.1. Augmentation de la constante d’inertie des générateurs
Cette méthode permet au rotor d’accélérer moins vite, quand le réseau subit un défaut quelconque (équation 1.9). L’énergie cinétique regagnée est réduite et le risque de perdre le synchronisme est alors diminué. Dans la plupart des cas, cette méthode coûte très chère, et ne peut être appliquée que dans des cas particuliers.
1.4.2. Augmentation de la puissance active
Pour un défaut affectant le réseau de la figure 1.3, le système conservera sa stabilité si n’atteint pas
(limite de stabilité). Par l’augmentation de la puissance active, et pour une puissance mécanique
donnée, les marges de stabilité augmentent également (figure 1.6). En se référant à l’équation (1.1) cette solution peut être réalisée soit en augmentant la tension de service, soit en diminuant la réactance de transfert par la construction des lignes en parallèle ou par l’installation des condensateurs série (compensation série), afin de diminuer la réactance effective de la ligne (Cette méthode a été employée pendant plusieurs années comme dans le cas du réseau Suédois).
Figure 1.6. Influence de la puissance active sur la marge de la stabilité 1.4.3. Installation des protections et des appareils de coupure rapides
Cette méthode réduit le temps d’existence du défaut, par conséquent, le temps d’accélération du rotor est réduit. La capacité du système d’amortir les oscillations du rotor est renforcée. Une autre voie dans le même contexte consiste en la fermeture automatique des disjoncteurs après l’élimination du défaut.
1.4.4. Implantation des valves rapides des turbines à gaz
Par un contrôle rapide de la puissance mécanique durant et après le défaut, l’accélération du rotor peut être réduite. Pour des raisons de sécurité, cette méthode n’a pas été appliquée au niveau des centrales nucléaires.
1.4.5. Installation des résistances d’amortissement
Ce sont des résistances connectées en shunt avec des disjoncteurs rapides afin de réduire l’accélération du rotor après le défaut et par conséquent le risque de perdre le synchronisme est aussi réduit.
180° 0°
1.4.6. Utilisation des PSS
Les stabilisateurs de puissance (PSS, Power System Stabilizers) qui sont des systèmes simples et faciles à installer, pratiques, efficaces et moins chers. Ils sont les plus utilisés essentiellement pour réduire les problèmes liés aux oscillations locales et interrégionales [5].
1.4.6.1. Composition d’une chaine de production
Avant d’entamer le principe de fonctionnement et la construction des PSS, il est très utile de connaitre la chaine de production d’électricité.
a. Machine synchrone
L’énergie électrique est généralement produite par les machines synchrones. Ces dernières sont caractérisées par une vitesse de rotation de l’arbre de sortie de chaque machine égale à la vitesse de rotation du champ tournant. Pour obtenir un tel fonctionnement, un couple mécanique issu d’une source d’énergie primaire, comme l’énergie hydraulique, l’énergie nucléaire ou l’énergie du vent, est appliqué à l’axe de la machine synchrone via un lien mécanique intermédiaire, à savoir la turbine. Le champ magnétique du rotor est généré habituellement par un circuit d’excitation alimenté par courant continu.
- Equations mécaniques
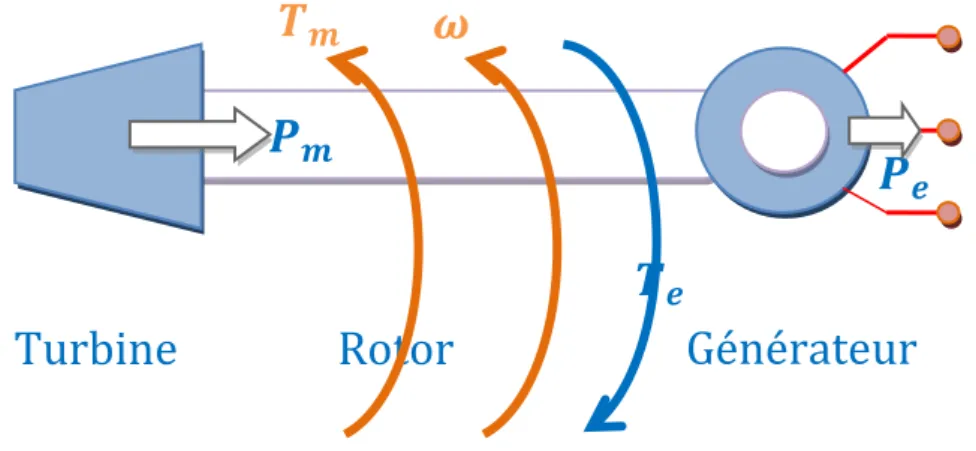
Dans le problème de la stabilité et notamment la stabilité transitoire, on s’intéresse généralement aux propriétés mécaniques des générateurs. Dans le fonctionnement à l’état d’équilibre, toutes les machines synchrones du système tournent à la même vitesse angulaire électrique. Le couple mécanique est de même sens que le sens de la rotation de l’axe du générateur. Le couple électrique est de sens opposé à la rotation et ce couple équilibre le couple mécanique, (Figure 1.7). Lors d’une perturbation, un ou plusieurs générateurs peuvent être accélérés ou ralentis et il y a donc risque de perdre le synchronisme. Ceci peut avoir un impact important sur la stabilité du système et les générateurs perdant le synchronisme doivent être débranchés, sinon ils pourraient être sévèrement endommagés [6]. Pour un système multi machines, s'il y a un déséquilibre des couples agissants sur le rotor de la i ème machine, cette dernière va accélérer ou ralentir selon l’équation du mouvement suivante :
(1.11)
L’équation de l’angle rotorique de la i ème machine est donnée par :
(1.12)
: déviation de la vitesse angulaire du rotor de i eme machine [pu] ; : vitesse de synchronisme [rad/s].
Figure 1.7. Description schématique des couples et puissances dans la machine synchrone
b. Turbine et Régulateur de fréquence
Un système de force motrice, (figure 1.8), se compose de la source d’énergie primaire, de la turbine (équipée d’un servomoteur) et du régulateur de fréquence (gouverneur) [6]:
Figure 1.8. Description schématiques d’une chaine de production
La turbine transforme l’énergie potentielle de la source en énergie de rotation de l’arbre (rotor) sur lequel est placé l’alternateur. L’alternateur convertit la puissance mécanique fournie par la turbine en puissance électrique de sortie. La vitesse de l’arbre de la turbine est mesurée précisément et comparée à la vitesse de référence. Le régulateur de fréquence (vitesse) agit ensuite sur le servomoteur pour ouvrir et fermer les vannes de contrôle et modifier par conséquent la vitesse du générateur. Ainsi, le rôle de la turbine est d’entraîner le rotor du générateur à la vitesse synchrone correspondant à la fréquence du système de puissance. Le modèle de l’ensemble turbine à vapeur/gouverneur utilisé en simulation dynamique du modèle non-linéaire est représenté par la figure 1.9 [6]:
Source de l’énergie primaire
Conversion de
l’énergie Turbine Générateur
Régulateur de
fréquence Référence de puissance Servo moteur Capteur de vitesse Arbre de transmission Valve de contrôle
Turbine
Rotor
Générateur
Figure 1.9. Modèle de la turbine et du gouverneur
c. Système d’excitation et régulateur de tension
Le système d’excitation est un système auxiliaire qui alimente les enroulements d’excitation de la machine synchrone afin que cette dernière puisse fournir le niveau de puissance demandé. En régime permanent, ce système fournit une tension et un courant continu mais il doit être capable également de faire varier rapidement la tension d’excitation en cas de perturbation sur le réseau. Les systèmes d’excitation sont équipés de contrôleurs, appelés habituellement régulateurs de tension (Automatic Voltage Regulator : AVR), figure 1.10. Ces derniers sont très importants pour l’équilibre de la puissance réactive qui sera fournie ou absorbée selon les besoins des charges. En outre ces contrôleurs représentent un moyen très important pour assurer la stabilité transitoire du système de puissance. Le régulateur de tension agit sur le courant d’excitation de l’alternateur pour régler le flux magnétique dans la machine et "ramener" la tension de sortie de la machine aux valeurs souhaitées. Une caractéristique très importante d’un régulateur de tension est sa capacité à faire varier rapidement la tension d’excitation [6].
Figure 1.10. Structure générale d’un système d’excitation statique avec AVR Actuellement, les systèmes d’excitation les plus utilisés sont [6]:
Source auxiliaire AVR Système d’excitation statique Turbine Générateur
Systèmes d'excitation à courant continu : Ils utilisent une génératrice à courant continu avec
collecteur comme source de puissance du système d’excitation.
Systèmes d’excitation à courant alternatif : Ils utilisent un alternateur et des redresseurs
statiques ou tournants pour produire le courant continu nécessaire dans l’enroulement d’excitation de la machine synchrone.
Systèmes d'excitation statiques : Dans ce cas, le courant d’excitation est fourni par un
redresseur commandé. Sa puissance est fournie soit directement par le générateur à travers un transformateur donnant le niveau approprié de tension, soit par des enroulements auxiliaires montés dans le générateur.
La figure 1.11 montre le modèle du système d’excitation et de son régulateur de tension utilisé.
Figure 1.11. Modèle simplifié du système d’excitation
La grandeur est la consigne de tension déterminée pour satisfaire les conditions de l’état
équilibré. Le régulateur de tension compare le signal (un signal continu proportionnel à la valeur efficace de la tension alternative du générateur) à la tension de consigne . Un signal
complémentaire peut être ajouté au nœud de comparaison : il s’agit d’un signal issu de certains dispositifs spécifiques de commande comme les stabilisateurs de puissance (PSS). Ensuite, le signal d’erreur est amplifié pour donner la tension d’excitation demandée . La constante de temps et le
gain de l’amplificateur sont respectivement et . Les valeurs extrémales de la tension d’excitation ( , ) sont fixées par un système de limitation.
La relation suivante décrit, le fonctionnement du modèle :
(1.13)
1.4.6.2. Fonctionnement et modèle de PSS
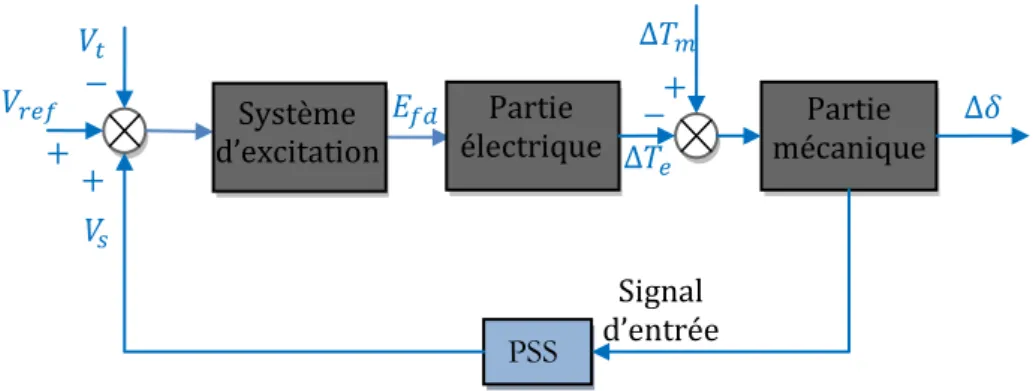
Un PSS permet d’ajouter un signal de tension proportionnel à la variation de vitesse de rotor dans l’entrée du régulateur de tension (AVR) du générateur, figure 1.12.
Figure 1.12. Modèle simplifié de la liaison entre PSS et le système
Par conséquent, l’ensemble du système de contrôle d’excitation (AVR et PSS) doit assurer les points suivants :
supporter les premières oscillations faisant suite à une grande perturbation ; c.-à-d assurer la stabilité transitoire du système.
maximiser l’amortissement des oscillations électromécaniques associées aux modes locaux ainsi qu’aux modes interrégionaux.
Le choix du signal d’entrée de PSS représente une étape critique dans la conception du PSS. Un bon résultat peut être obtenu si l’entrée du PSS est la variation de la vitesse de rotor , la variation de puissance produite du générateur ou la fréquence du jeu de barres [5, 6].
Le type de PSS le plus utilisé est connu sous le nom de PSS conventionnel (ou PSS avance/retard). Ce type a montré sa grande efficacité dans le maintien de la stabilité aux petites perturbations. Ce PSS utilise la variation de vitesse de rotor comme entrée. Il se compose généralement de quatre blocs, (figure 1.13) :
un bloc d’amplificateur.
un bloc de filtre passe-haut "filtre washout".
un bloc de compensation de phase.
un limiteur
Figure 1.13. Modèle d’un PSS type avance de phase Gain
Filtre Bloc avance/retard
Système d’excitation Partie électrique Partie mécanique PSS Signal d’entrée
a. Amplificateur
Il détermine la valeur de l’amortissement introduit par le PSS. Théoriquement, sa valeur doit
correspondre à l’amortissement maximal. Généralement, varie généralement de 0.01 à 50 [6].
b. Filtre passe-haut "filtre washout"
Il élimine les oscillations à très basses fréquences (inférieures à 0.2 Hz) présentées dans le signal d’entrée. Il supprime également la composante continue de la vitesse (la composante "DC" correspondant au régime statique) : le PSS ne réagit donc que lorsqu’il y a des variations de vitesse (fourni une sortie nulle en état d’équilibre [5]). Une amélioration remarquable sur la stabilité de la première oscillation est obtenue avec une valeur fixée à 10 secondes.
c. Filtre de compensation de phase
L’origine de l’amortissement négatif est associée au retard de phase introduit entre le couple électrique du générateur ( ) et l’entrée du système d’excitation ( ). Par conséquent, le PSS fournit l’avance
de phase nécessaire pour compenser ce retard. Pratiquement, un bloc de phase d’avance pure ne suffit pas pour réaliser la compensation de phase nécessaire ; ainsi, un bloc d’avance/retard de phase est souvent utilisé. Pour mieux garantir la stabilité du système, deux étages (au moins) de compensations de phase sont nécessaires. La fonction de transfert de chaque étage est une simple combinaison de pole-zéro, les constantes de temps d’avance (T1, T3) et de retard (T2, T4) étant réglables. La gamme de chaque constante de temps s’étend généralement de 0.01 à 6 secondes [6].
d. Limiteur
Les valeurs minimales et maximales du limiteur s’étendent de ± 0.02 à 0.1 pu
1.4.7. Contrôle rapide et flexible de l’écoulement de puissance
En installant des dispositifs contrôlables, comme le transport d’énergie en courant continu (High Voltage Direct Current, HVDC), et les dispositifs FACTS (Flexible Alternating Current Transmission System). Malgré le coût élevé de cette solution, mais vu l’évolution récente des réseaux électriques et leurs contraintes, cette solution est très efficace [7, 14].
1.5. Conclusion
L’étude de la stabilité transitoire est une étape primordiale dans la conception, la planification et l’exploitation des systèmes électriques. Grâce à cette étude, on peut porter un jugement sur la capacité du réseau à résister contre les incidents majeurs qui peuvent surgir en tout moment.
L’une des méthodes d’améliorer la capacité d’un système électrique à résister contre les grands incidents est d’intégrer des dispositifs à base d’électronique de puissance (FACTS) dans le réseau de transport. L’étude, l’apport et l’utilisation de ces dispositifs font l’objet du prochain chapitre.
Chapitre 02
E
TUDE
D
ES
D
ISPOSITIFS
FACTS
2.1. Introduction
Devant les problèmes de transit de puissances, la compagnie américaine EPRI (Electric Power Research Institute) a lancé, en 1988, un projet d’étude des systèmes FACTS afin de mieux maîtriser le transit de puissance dans les lignes électriques. Le concept FACTS regroupe tous les dispositifs à base d’électronique de puissance qui permettent d’améliorer l’exploitation du réseau électrique.
La technologie de ces systèmes (interrupteur statique) leur assure une vitesse supérieure à celle des systèmes électromécaniques classiques. De plus, elles peuvent contrôler le transit de puissance dans les réseaux de transport et augmenter la capacité efficace de transport tout en maintenant la stabilité des réseaux.
2.2. Concepts de base et définitions
Le concept de base des dispositifs FACTS (Flexible AC Transmission System) est basé sur l’incorporation des dispositifs à base d’électronique de puissance dans les systèmes électro énergétiques haute tension, afin de les rendre électroniquement contrôlables [15]. L'ère des dispositifs FACTS était déclenchée par le développement de nouveaux dispositifs à semi-conducteurs de commutation électriques (IGCT, GTO…) [16]. La technologie FACTS n'est pas limitée en un seul dispositif mais elle regroupe une collection de dispositifs implantés dans les réseaux électriques afin de mieux contrôler le flux de puissance et augmenter la capacité de transit de leurs lignes. Par action de contrôle rapide de ces systèmes sur l'ensemble des paramètres du réseau: tension, impédance, angle …etc., ils permettent d'améliorer les marges de stabilité et assurer une meilleure flexibilité du transfert d'énergie [1, 16].
La flexibilité de transmission de l'énergie est définie comme étant l’aptitude d'accommoder aux changements du système énergétique et aux conditions de fonctionnement en maintenant l'état stable et de suffisantes marges de stabilité transitoire
2.3. Nécessité des dispositifs FACTS
La compensation de l’énergie réactive au niveau des lignes de transmission permet la régulation du profil de la tension le long de ces lignes avec un bon contrôle de la puissance active transmise. Il est
reconnu que, la stabilité peut être améliorée, quelque soit son type, si la compensation réactive du système de transmission varie rapidement. Les méthodes de compensation de l’énergie réactive classiques se basent sur les batteries de condensateurs ou les bobines fixes ou commandées mécaniquement. Ces méthodes sont non efficaces dans le contrôle du réseau électrique quand il est sévèrement perturbé [7].
Grâce aux avancées récentes dans la technologie des IGBT et GTO, le temps de réaction de ces dispositifs est diminué à quelques milli secondes. Il est possible donc de répondre à la demande par l’utilisation d’une compensation rapide en utilisant les dispositifs FACTS [17].
2.4. Classification des systèmes FACTS
Les dispositifs FACTS peuvent être classés en trois catégories :
2.4.1. Compensateurs séries
Ces compensateurs sont connectés en série avec le réseau et peuvent être utilisés comme une impédance variable (inductive, capacitive) ou une source de tension variable. En général, ces compensateurs modifient l’impédance des lignes de transport en insérant des éléments en série avec celles-ci [17].
2.4.1.1. Condensateurs séries contrôlés par thyristors TCSC
Le TCSC (Thyristor Controlled Series Capacitor) est parmi les dispositifs FACTS les plus importants, utilisé pendant plusieurs années pour l’augmentation de la puissance transmise par la ligne, afin de renforcer la stabilité du réseau [17]. Il est constitué d'une inductance en série avec un gradateur (TCR Thyristor Series Reactor) et l'ensemble en parallèle avec une capacité comme l’illustre la Figure 2.1.
Figure 2.1. Structure du TCSC L ligne I Ligne de transmission C MOV
Le TCSC placé en série dans une ligne de transport permet de contrôler le flux de puissances et d'élever la capacité de transfert des lignes en agissant sur la réactance qui varie selon l'angle de
retard à l'amorçage des thyristors donné par la formule :
(2.1)
L’action du contrôle du TCSC est exprimée en terme de pourcentage de compensation donné par [18]:
(2.2)
Où :
; la réactance de la ligne ;
; la réactance capacitive effective offerte par le TCSC.
Suivant la valeur de on distingue trois modes de fonctionnement [17, 18] :
la bobine est complètement déconnectée, le TCSC est considéré comme un condensateur série fixe ;
est la combinaison parallèle de et ;
les thyristors sont en pleine conduction, le TCSC peut servir à limiter le courant de défaut.
La puissance transitée dans une ligne équipée d’un TCSC est donnée par la formule :
(2.3)
Généralement, chaque ensemble possède en parallèle un élément de protection contre les surtensions, appelé MOV (Métal Oxide Varistor) [7].
2.4.1.2. Compensateur réactif contrôlé par thyristor TCSR
Le TCSR (Thyristor Controlled Series Reactor) est un compensateur inductif qui se compose d'une inductance en parallèle avec une autre inductance commandée par thyristor afin de fournir une réactance inductive série variable [17].
Figure 2.2. Structure du TCSR
Lorsque l'angle d'amorçage du réacteur commandé par thyristor est de 180 degrés, il cesse de conduire, et la réactance non contrôlable agit comme un limiteur de courant de défaut. Pendant que l'angle d'amorçage
diminue en dessous de 180 degrés, la réactance équivalente diminue jusqu'à l'angle de 90 degrés, où elle est la combinaison parallèle de deux réactances.
2.4.1.3. Compensateur synchrone statique série SSSC
Ce type de compensateur série (en anglais, Static Synchronous Series Compensator) est le plus important dispositif de cette famille. Il est constitué d’un onduleur triphasé couplé en série avec la ligne électrique à l'aide d'un transformateur. Ce dispositif possède des avantages si l’on compare avec le TCSC [19];
Elimination des composants passifs (inductance et capacités);
Une aptitude symétrique dans les deux modes (inductif et capacitif).
Son rôle est d’introduire une tension triphasée , à la fréquence du réseau, en série avec la ligne de transport. Cette tension est en quadrature avec le courant de la ligne. Nous pouvons, dans ce cas, régler continuellement la valeur apparente de la capacité ou de l’inductance ainsi introduite dans la ligne. La figure 2.3 montre le schéma de base d’un SSSC et sa caractéristique V-I
Figure 2.3. Compensateur synchrone statique série
Unité de contrôle dc V Convertisseur ligne I Mode capacitif Mode inductif
a- Schéma fonctionnel b- Caractéristique V-I
Ligne de transmission
I
ligne 2 X 1 XSi l’injection de s’effectue avec un angle de 90° degré en arrière par rapport au courant de la ligne, on obtient une compensation série. Cette compensation est équivalente à un condensateur série à la fréquence fondamentale. Si par contre, la tension est injectée avec un angle de 90° en avance par rapport au courant de la ligne, la compensation a le même effet que celui d’augmenter l’impédance réactive de la ligne.
Comparé avec le compensateur série conventionnel, le SSSC fournit une tension série qui est indépendante du courant de la ligne. En plus, le SSSC est capable de fournir une compensation à tension constante et en phase avec le courant variable de la ligne. L’amplitude de la tension injectée peut être contrôlée indépendamment de l’amplitude du courant de la ligne.
2.4.2. Compensateurs shunts
Vers la fin des années 60, plusieurs équipements utilisant l’électronique de puissance ont fait leurs apparitions. Ces derniers avaient l’avantage d’éliminer les parties mécaniques et d'avoir un temps de réponse très court. Ces équipements étaient constitués essentiellement d’une inductance en série avec un gradateur. Le retard à l’amorçage des thyristors permettait de régler l’énergie réactive absorbée par le dispositif. En effet, tous les compensateurs parallèles injectent du courant au réseau via le point de raccordement. Quand une impédance variable est connectée en parallèle sur un réseau, elle consomme (ou injecte) un courant variable. Cette injection de courant modifie les puissances actives et réactives qui transitent dans la ligne [17].
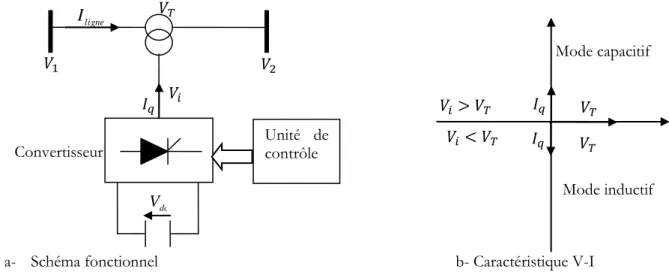
2.4.2.1. Compensateur statique de l’énergie réactive SVC
Le SVC (Static Var Compensator) est la première génération FACTS qui a été déposée sur le marché il y a presque trente ans [7]. Il est constitué d’une batterie de condensateurs commutés à thyristors (TSC Thyristor Switched Capacitors), et d’un banc de bobines contrôlées à thyristors (TCR Thyristor Controlled Reactors) comme le montre la figure 2.4, dont le premier exemple a été installé en 1979 en Afrique du Sud [17]. Avec une coordination appropriée de l’interrupteur des condensateurs et le contrôle des bobines, la puissance réactive de sortie peut être variée continuellement entre les taux capacitifs et inductifs de l’équipement.
Un SVC supposé idéal ne contient pas de composant résistif , donc il ne consomme pas
d'énergie active du réseau. Sa puissance réactive est une fonction de la tension au jeu de barres de connexion et de la susceptance
(2.4)
Figure 2.4. Structure du SVC
Les éléments contrôlables sont les thyristors du TCR et TSC (le courant du TCR est en arrière de 90° degrés par rapport à la tension) [20]. A l’état stable, la loi de commande du SVC obéit à la caractéristique V-I du compensateur. Cette dernière peut être écrite sous forme d’équations [21]:
En mode de régulation selon la valeur de ;
(2.6)
Sachant que:
-
le SVC est totalement capacitif,
-
le SVC est totalement inductif,
Où :
: tension au niveau de jeu de barres :
: tension de référence :
:courant du SVC :
:la pente de réactance
:susceptance capacitive maximale :
:susceptance inductive maximale.
Contrôle Transformateur de couplage Vt Vref Signal auxiliaire C L TCR TSC Ligne de transmission
Les valeurs typiques du sont de 0.02 à 0.05 pu. A tension nominale, le SVC se comporte comme une réactance fixe. La caractéristique du SVC est donnée par la figure 2.5 [22]:
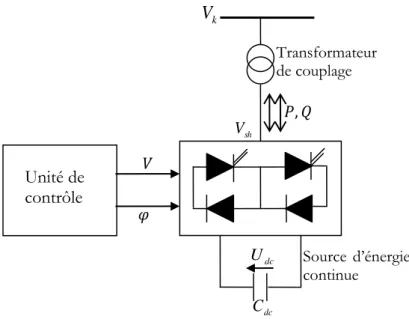
Figure 2.5. La caractéristique V-I du SVC 2.4.2.2. Compensateur synchrone statique STATCOM
C'est en 1990 que le premier STATCOM a été conçu. C'est un convertisseur de tension à base des thyristors GTO ou IGBT alimenté par des batteries de condensateurs. L'ensemble est connecté parallèlement au réseau à travers un transformateur de couplage. Le principe de ce type de compensateur est connu depuis la fin des années 70, mais ce n’est que dans les années 90 que ce type de compensateur a connu un essor important grâce aux développements des interrupteurs GTO de forte puissance [17].
La figure 2.6 représente le schéma de base d’un STATCOM. Les cellules de commutation sont bidirectionnelles, formées de thyristors GTO et de diode en antiparallèle.
Figure 2.6. Structure du STATCOM
k V dc C Transformateur de couplage sh V dc U Source d’énergie continue Unité de contrôle Inductif Capacitif Zone de régulation
Ce dispositif peut fournir une puissance réactive variable et réguler la tension du jeu de barres où il est connecté [19]. Il est analogue à un compensateur synchrone. Son rôle est identique à un SVC mais avec plus de robustesse. Ce dispositif est capable de fournir la puissance réactive même si la tension du jeu de barres de connexion est très faible. D’après sa caractéristique on constate que le courant maximal du STATCOM est indépendant de la tension du nœud [23].
Pour un STATCOM idéal n’ayant pas de pertes actives, l’équation de la puissance réactive suivante décrit le transfert de cette dernière avec le réseau :
(2.7)
Si , alors devient positive, le courant circulant dans l’inductance est déphasé de
– par rapport à la tension donc le STATCOM absorbe de la puissance réactive.
Si , alors devient négative, le courant circulant dans l’inductance est déphasé de
par rapport à la tension donc le STATCOM fournie de la puissance réactive.
Si , , le courant dans l’inductance est nul, et par conséquent pas d’échange
d’énergie.
2.4.3. Compensateurs série-shunt (hybrides)
Ces dispositifs constituent une combinaison des dispositifs séries et shunts commandés d'une manière coordonnée afin d'accomplir un contrôle prédéfini. Ces dispositifs permettent un contrôle multi variables, ils servent à contrôler le flux de puissance active et réactive, la tension et l'angle de transport.
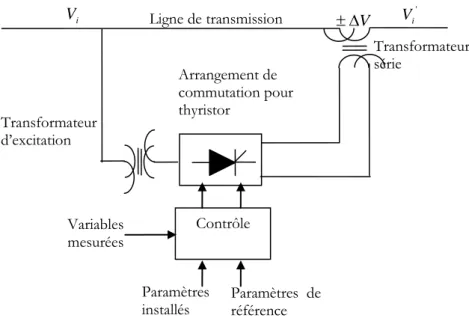
2.4.3.1. Régulateur d’angle de phase contrôlé par thyristors TCPAR
Le TCPAR (Thyristor Controlled Phase Angle Regulator ) ou bien déphaseur statique, est un transformateur déphaseur à base de thyristors [7]. Ce dispositif a été créé pour remplacer les déphaseurs à transformateurs à régleur en charge (LTC ; Load Tap Changer) qui sont commandés mécaniquement. Il est constitué de deux transformateurs, l’un est branché en série avec la ligne et l’autre en parallèle. Ce dernier possède plusieurs rapports de transformation . Ces deux transformateurs sont liés par un arrangement de thyristors de commutation figure.2.7.
Son principe de fonctionnement est d’injecter, sur les trois phases de la ligne de transmission, une tension en quadrature avec celle de la ligne. Cette tension injectée peut modifier l’angle de phase de la tension de la ligne et aussi le contrôle de l’écoulement de puissance.
Figure 2.7. Structure du TCPAR
L’arrangement de thyristors est combiné de façon à fournir une tension changeable au secondaire du transformateur série ∆V et d’angle de 90° relatif à la tension de la ligne.
Ce type de compensateur n’est pas couramment utilisé.
2.4.3.2. Contrôleur unifié de l’écoulement de puissance UPFC
Gyugyi a présenté le concept de l’UPFC en 1990. L’originalité de ce compensateur est de pouvoir contrôler les trois paramètres associés au transit de puissance dans une ligne électrique [17]:
La tension,
L’impédance de la ligne,
Le déphasage des tensions aux extrémités de la ligne.
Comme le TCPAR, l’UPFC est constitué de deux transformateurs, l’un est connecté en série et l’autre en shunt avec la ligne de transmission. Chaque transformateur est connecté à un onduleur à base des thyristors GTO. Ces derniers sont couplés à travers une liaison continue DC. Autrement dit, l’UPFC est la combinaison d’un STATCOM et un SSSC couplés à travers une liaison DC commune, pour permettre l’écoulement bidirectionnelle de la puissance active. En effet, l’énergie active peut circuler librement dans les deux directions entre les extrémités AC des deux convertisseurs et chaque convertisseur peut générer ou absorber l’énergie réactive indépendamment. La figure 2.8 montre le schéma de base de l’UPFC :
Paramètres
installés Paramètres de référence Contrôle Arrangement de commutation pour thyristor Variables mesurées V Ligne de transmission i V Transformateur d’excitation ' i V Transformateur série
![Figure 1.10. Structure générale d’un système d’excitation statique avec AVR Actuellement, les systèmes d’excitation les plus utilisés sont [6]:](https://thumb-eu.123doks.com/thumbv2/123doknet/3449635.100754/27.892.260.650.767.1048/structure-générale-système-excitation-actuellement-systèmes-excitation-utilisés.webp)