FACULTÉ DES SCIENCES
Rabat
Faculté des Sciences, 4 Avenue Ibn Battouta B.P. 1014 RP, Rabat – Maroc Tel +212 (0) 37 77 18 34/35/38, Fax : +212 (0) 37 77 42 61, http://www.fsr.ac.ma
Thèse de Doctorat
Présentée par
Noureddine ASSAD
Titre
Optimisation du déploiement des réseaux de capteurs sans fil :
Couverture de la zone de surveillance et connectivité du réseau
dans une application de détection d'intrusion.
Discipline : Sciences de l’ingénieur
Spécialité : Informatique et Télécommunications
Soutenue le 05/12/2015, devant le jury composé de :
Président :
Driss ABOUTAJDINE PES, Faculté des Sciences de Rabat, Maroc.
Examinateurs :
M. Mohamed OUADOU PES, Faculté des Sciences de Rabat, Maroc. M. Ahmed TAMTAOUI PES, Institut National des Postes et
Télécommunications, Rabat, Maroc.
M. Mohammed EL KOUTBI PES, Ecole Nationale Supérieure d’Informatique et d’Analyse des Systèmes, Rabat, Maroc.
Mme. Sanaa EL FKIHI PH, Ecole Nationale Supérieure d’Informatique et d’Analyse des Systèmes, Rabat, Maroc.
M. Ouadoudi ZYTOUNE PH, Ecole Nationale de Commerce et de Gestion de Kénitra, Maroc.
M. Moulay Ahmed FAQIHI PA, Ecole Nationale Supérieure d’Informatique et d’Analyse des Systèmes, Rabat, Maroc.
C’est avec un grand plaisir que je r´eserve ces lignes en signe de gratitude et de recon-naissance `a tous ceux qui ont contribu´e de pr`es ou de loin `a l’´elaboration de ce travail de th`ese que je tiens `a remercier du profond du coeur.
Les travaux pr´esent´es dans ce manuscrit ont ´et´e r´ealis´es au sein du Laboratoire de Re-cherche en Informatique et T´el´ecommunications (LRIT) de la Facult´e des Sciences de Rabat - Universit´e Mohammed V, Maroc, sous la direction de Monsieur Mohamed OUA-DOU et le co-encadrement de Monsieur Moulay Ahmed FAQIHI.
Je tiens `a remercier en premier lieu Monsieur Mohamed OUADOU, Professeur d’en-seignement sup´erieur `a la Facult´e des Sciences de Rabat, responsable de la Licence Pro-fessionnelle R´eseaux et T´el´ecommunications et directeur de ma th`ese, pour leur encoura-gement, leur disponibilit´e, leurs id´ees, leurs conseils et leur sympathie qui m’ont permis de mener `a bien cette th`ese.
Un grand merci `a Monsieur Moulay Ahmed FAQIHI, Professeur `a Universit´e Moham-med V, ´Ecole Nationale Sup´erieure d’Informatique et d’Analyse des Syst`emes de Rabat, pour ces ann´ees de soutien, pour ses pr´ecieux conseils et pour leur encadrement tr`es efficace dans la conduite de ce travail, et qui m’ont beaucoup apport´e du point de vue scientifique, mais ´egalement de partager des amiti´es fortes et inoubliable.
Je tiens ´egalement `a exprimer mes tr`es sinc`eres remerciements aux membres du jury, qui ont accept´e d’´evaluer mes travaux de th`ese.
Je tiens `a exprimer ma gratitude `a Monsieur Driss ABOUTAJDINE, Professeur d’en-seignement sup´erieur `a la Facult´e des Sciences de Rabat, directeur du Centre National pour la Recherche Scientifique et Technique (CNRST), Responsable du Laboratoire de Re-cherche LRIT. Je le remercie ´egalement de m’avoir fait l’honneur de pr´esider mon jury de th`ese.
Je tiens ´egalement `a exprimer mes remerciements `a Monsieur Mohammed EL KOUTBI, Professeur d’enseignement sup´erieur `a l’ ´Ecole Nationale Sup´erieure d ?Informatique et d ?Analyse des Syst`emes de Rabat, d’avoir accept´e de rapporter ces travaux de th`ese.
Je remercie ´egalement Madame Sanaa EL FKIHI, Professeur habilit´e `a l’ ´Ecole Na-tionale Sup´erieure d ?Informatique et d ?Analyse des Syst`emes de Rabat, de m’avoir fait l’honneur de rapporter sur mes travaux de th`ese. Merci pour leur remarques constructives qui m’ont beaucoup aid´e `a am´eliorer la qualit´e de ce manuscrit.
Merci `a Monsieur Ouadoudi ZYTOUNE, Professeur habilit´e `a l’ ´Ecole Nationale de Commerce et de Gestion de K´enitra, pour avoir accept´e de rapporter ces travaux de th`ese et de participer au jury. Merci pour leur remarques et conseils constructives.
Merci `a Monsieur Ahmed TAMTAOUI, Professeur `a l’Institut National des Postes et T´el´ecommunications de Rabat, pour avoir accept´e d’examiner mes travaux et de participer au jury de cette th`ese
`a l’EMSI de Rabat, pour ses pr´ecieux conseils, pour l’int´erˆet constant qu’il a port´e `a ce travail ainsi que pour son soutien. Je le remercie infiniment pour sa rigueur scientifique, sa patience et sa vision en mati`ere de recherche.
Merci ´egalement `a tous les autres membres du laboratoire LRIT, pour leurs conseils, encouragements et pour la sympathie qu’ils m’ont t´emoign´e.
Un merci sans ´egal pour mes parents et mes fr`eres d’avoir ´et´e `a mon cˆot´e, qui m’ont vraiment soutenus et encourag´es `a aller de l’avant dans les moments les plus difficiles, tout particuli`erement mes derni`eres ann´ees d’´etudes. Je ne pourrai jamais vous remercier assez.
Le grand et le vrai merci `a Dieu Allah qui m’a donn´ee la force, la volont´e et la vie pour accomplir ce travail.
Les progr`es r´ealis´es dans le domaine des syst`emes micro-´electrom´ecaniques (MEMS) ainsi que ceux du domaine des t´el´ecommunications, ont conduit `a la naissance de nouvelle gamme de dispositifs ´electroniques de dimension bien r´eduite `a faible coˆut appel´es nœud-capteurs. Ces derniers, ´etant d´eploy´es dans un environnement cible, r´ealisent des mesures de grandeurs physiques relatives `a la zone de d´eploiement. Les nœud-capteurs regroup´es forment une plateforme de communication commun´ement appel´ee r´eseau de capteurs sans fil (RCSF). Cette plateforme ouvre la voie `a des solutions ´economiquement attrayantes pour de nombreux domaines d’application.
La technique de d´eploiement des nœud-capteurs dans une zone de surveillance, est cit´ee parmi les points critiques pour la conception et la r´ealisation des r´eseaux de cap-teurs. Les nœud-capteurs peuvent ˆetre plac´es d’une fa¸con d´eterministe dans une zone de surveillance. Pour certaines applications de RCSF, en raison de l’inaccessibilit´e de la zone de surveillance (zone hostile) ou de grande taille du r´eseau de capteurs, le recours `a un d´eploiement al´eatoire peut ˆetre la seule alternative.
Les travaux de recherche pr´esent´es dans ce manuscrit s’inscrivent dans le cadre de l’application de d´etection d’intrusion dans une zone de surveillance, o`u les nœud-capteurs sont al´eatoirement distribu´es. L’application est d´efinie comme un m´ecanisme visant la d´etection des intrusions non autoris´ees ou des attaquants mobiles. De ce fait, la couverture de la zone de surveillance et la connectivit´e du r´eseau sont deux contraintes qui doivent ˆetre assur´ees en tant que qualit´e de service de RCSF.
L’utilisation de la technique de d´eploiement al´eatoire, engendre le d´efi d’assurer la qualit´e de couverture de la zone de surveillance et la qualit´e de la connectivit´e du r´eseau, qui se d´egradent significativement avec une mauvaise r´epartition des nœud-capteurs. Pour faire face `a ces d´efis, nous avons d´evelopp´e des mod`eles probabilistes qui optimisent le d´e-ploiement des RCSFs. Ces mod`eles sont appropri´es pour pr´evoir des conditions suffisantes pour garantir la couverture de la zone de surveillance et la connectivit´e du r´eseau. Nous avons ´egalement propos´e un protocole de routage des donn´ees, pour un bilan ´energ´etique optimal et pour un taux de livraison ´elev´e, appel´e MCLsum (Sum Minimum Cost Link).
Mots cl ´es : probabilit´e de d´etection d’intrusion ; couverture du r´eseau ; connectivit´e du r´eseau ; port´ee de d´etection ; port´ee de transmission ; densit´e des noeud-capteurs
Technological advances in the field of micro-electromechanical systems (MEMS) as well as those of telecommunications, have made possible to develop small low-cost devices, called sensor nodes, which may be deployed in large numbers to form a wireless sensor net-work (WSN). Each sensor node senses a field of interest and communicates the collected data to the sink, where the end user can access them. This thesis focuses on WSN sur-veillance applications like the detection of unauthorized/unusual moving intruders, which requires to characterize some WSN parameters that does not exist in traditional sensor networks.
The sensor deployment quality is a critical issue since it reflects the cost and detec-tion capability of a wireless sensor network. The quality of deterministic deployment can be determined sufficiently by a rigorous analysis before the deployment. However, when random deployment is required, determining the deployment quality becomes challenging. The research presented in this manuscript is within the scope of the intrusion detec-tion applicadetec-tion. It is defined as a mechanism to monitor and detect any unauthorized intrusions or anomalous moving attackers in a field of interest, where sensor nodes are randomly distributed.
The random deployment strategy creates the challenge of ensuring the quality of coverage and the quality of network connectivity. The WSN must provide satisfactory connectivity so that each sensor node can communicate data collaboration and reports to the sink, which may be in any location of the sensing area. If the greater connectivity is not assured, it is until even the sensor node detects an intruder. A probabilistic approach is developed by deriving some analytical expressions to characterize the topological pro-perties of sensor network, and analyse the intrusion detection model in a wireless sensor network. First, we have developed a sufficient condition that provides guaranteed coverage and connectivity of multi-sensing detection. Second, we proved this sufficient condition by developing a probabilistic approach. Therefore, we believe that the quality of intrusion detection in the wireless sensor network is enhanced. An appropriate energy-efficient rou-ting algorithm MCLsum (Sum Minimum Cost Link) have been proposed which equitably distributes the energy consumption over all nodes located in the hotspot area and avoids the isolation of the sink from the rest of the network.
Keywords : intrusion detection probability ; network coverage ; network connectivity ; sen-sing range ; transmission range ; sensor node density
Liste des acronymes xi
Liste des figures 1
Chapitre 1 : Introduction . . . 1
1.1 Contexte g´en´eral . . . 1
1.2 Probl´ematiques . . . 2
1.3 Principales contributions de la th`ese . . . 3
1.4 Liste des publications . . . 4
1.4.1 Revues internationales . . . 4
1.4.2 Conf´erences internationales . . . 4
1.5 Organisation de la th`ese . . . 5
Chapitre 2 : R´eseaux de capteurs sans fil : vue g´en´erale et d´efis de concep-tion . . . 7
2.1 Introduction . . . 7
2.2 Architecture physique d’un nœud-capteur . . . 8
2.3 Architecture des r´eseaux de capteurs sans fil . . . 9
2.4 Caract´eristiques des r´eseaux de capteurs sans fil . . . 10
2.4.1 D´eploiement des nœud-capteurs . . . 10
2.4.1.1 D´eploiement d´eterministe . . . 11 2.4.1.2 D´eploiement al´eatoire . . . 11 2.4.2 Topologie du r´eseau . . . 11 2.4.3 Couverture du r´eseau . . . 12 2.4.4 Connectivit´e du r´eseau . . . 13 2.4.5 Couverture-connectivit´e du r´eseau . . . 14 2.4.6 R´eseau de communication . . . 14
2.4.7 Energie et dur´ee de vie du r´eseau . . . 15´
2.4.8 Diff´erents facteurs de conception des r´eseaux de capteurs sans fil . . 16
2.5 Domaines d’applications des r´eseaux de capteurs sans fil . . . 17
mentale . . . 18
2.5.3 Autres applications . . . 19
2.6 Conclusion . . . 20
Chapitre 3 : Mod`ele de couverture et de connectivit´e des RCSFs . . . 21
3.1 Introduction . . . 21
3.2 Pr´eliminaires . . . 22
3.2.1 Port´ee de d´etection . . . 22
3.2.2 Port´ee de transmission . . . 22
3.2.3 Collaboration des nœud-capteurs . . . 22
3.2.4 Zone de chevauchement des nœud-capteurs . . . 22
3.2.5 Nœud-capteurs voisins . . . 23
3.2.6 Degr´e d’un nœud-capteur . . . 23
3.3 Topologie du r´eseau . . . 24
3.3.1 Mod`ele de d´etection . . . 24
3.3.2 Mod`ele de communication . . . 25
3.4 Couverture du r´eseau . . . 26
3.4.1 Qualit´e de couverture du r´eseau . . . 26
3.4.2 Degr´e de couverture du r´eseau . . . 27
3.5 Connectivit´e du r´eseau . . . 28
3.5.1 Qualit´e de connectivit´e du r´eseau . . . 28
3.5.2 Degr´e de connectivit´e du r´eseau . . . 28
3.6 Conclusion . . . 29
Chapitre 4 : Solution propos´ee pour la d´etection d’intrusion dans les RCSFs . . . 31
4.1 Introduction . . . 31
4.2 Mod`ele de sc´enario d’intrusion . . . 32
4.3 Mod`ele de d´etection d’intrusion . . . 33
4.3.1 Mono-d´etection . . . 36
4.3.2 Multi-d´etection . . . 36
4.4 Mod`ele de d´etection pour multi-intrusion . . . 37
4.4.1 Mono-d´etection . . . 38
4.4.2 Multi-d´etection . . . 39
4.5 Disponibilit´e des nœud-capteurs . . . 40
4.6 Evaluation de la qualit´e de d´etection d’intrusion . . . 41´
4.7 Conclusion . . . 45
Chapitre 5 : Solution propos´ee pour la garantie de la couverture-connectivit´e des RCSFs . . . 47
5.1 Introduction . . . 47
5.3 Nœud-capteurs isol´es du r´eseau . . . 49
5.4 Mod`ele de connectivit´e du r´eseau . . . 50
5.5 R´egime de connectivit´e du r´eseau . . . 50
5.5.1 Degr´e de connectivit´e du r´eseau . . . 51
5.5.2 Condition suffisante pour garantir la connectivit´e du r´eseau . . . 52
5.6 Disponibilit´e des nœud-capteurs dans le mod`ele de connectivit´e . . . 53
5.7 Couverture et connectivit´e du r´eseau . . . 54
5.7.1 Relation entre la couverture et la connectivit´e du r´eseau . . . 55
5.7.2 Couverture-connectivit´e int´egr´ee : analyse g´eom´etrique . . . 57
5.7.3 Couverture-connectivit´e int´egr´ee : analyse de probabilit´e . . . 59
5.8 Evaluation de la qualit´e de connectivit´e et de couverture-connectivit´e int´e-´ gr´ee du r´eseau . . . 62
5.9 Conclusion . . . 66
Chapitre 6 : Proposition d’une architecture de communication pour les RCSFs multi-sauts . . . 69
6.1 Introduction . . . 69
6.2 Zone de hotspot . . . 70
6.3 R`egle de s´election des nœud-capteurs candidats au routage dans la zone de hotspot . . . 71
6.4 Architecture de communication propos´ee . . . 72
6.5 Evaluation des performances de l’architecture de communication propos´ee . 76´ 6.5.1 Environnement de simulation . . . 76
6.5.2 R´esultats et discussion . . . 78
6.6 Conclusion . . . 79
Chapitre 7 : Conclusion g´en´erale et perspectives . . . 81
7.1 Apports de la th`ese . . . 81
7.2 Perspectives . . . 82
ARC Adaptive Random Clustering CGA Centralized Greedy Algorithm DGA Distributed Greedy Algorithm
ECDS Efficient Distributed Approximation Algorithm ILP Integer Linear Programming
GPS Global Positioning System MAP Markov Arrival Processes MCLsum Sum Minimum Cost Link
MCMS Maximum Coverage with Minimum Sensors MTE Minimum Transmission Energy
PC N etwork Probability of Network Connectivity - Probabilit´e de
connectivit´e du r´eseau
Psensing Probability of sensing - Probabilit´e de d´etection
Pthreshold connectivity Threshold probability of network connectivity -
Probabi-lit´e seuil de connectivit´e du r´eseau
Pthreshold sensing Threshold probability of sensing - Probabilit´e seuil de
d´e-tection
RSEN S Sensing Range - Port´ee de d´etection
RT RAN S Transmission Range - Port´ee de Transmission
RCSF R´eseau de Capteurs sans Fil
SNCS Sensing Neighbourhood Cooperative Sleeping WBP Weakest Breach Path
WSN Wireless Sensor Network
2.1 Architecture physique d’un nœud-capteur. . . 9
2.2 Mod`ele d’architecture des r´eseaux de capteurs sans fil. . . 10
2.3 Couverture du r´eseau. . . 12
2.4 Connectivit´e du r´eseau. . . 13
2.5 Couverture-connectivit´e du r´eseau. . . 14
2.6 Exemple d’une application militaire : d´etection et trac´e du chemin d’un v´ehicule militaire. . . 18
2.7 Architecture du r´eseau de capteurs sans fil pour une application de sur-veillance de volcan. . . 19
3.1 (a) : condition de collaboration des nœud-capteurs Ni et Nj, (b) : condition de communication des nœud-capteurs Ni et Nj. . . 23
3.2 (a) : mod`ele de d´etection binaire, (b) : mod`ele de d´etection probabiliste. . . 25
3.3 Exemple de k-couverture, (a) : k=2, (b) : k=3, (c) : k=4. . . 27
4.1 Mod`ele de sc´enario d’intrusion dans une zone de surveillance. . . 33
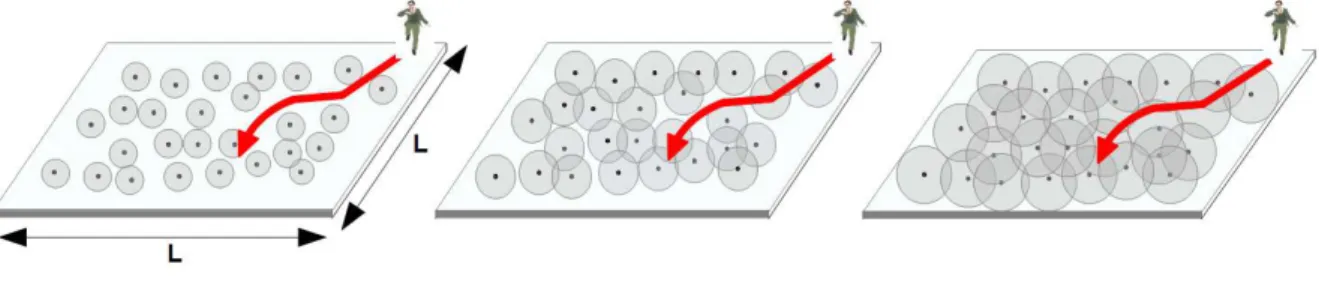
4.2 Variation de la port´ee de d´etection RSEN S des nœud-capteurs et la couver-ture du r´eseau. . . 33
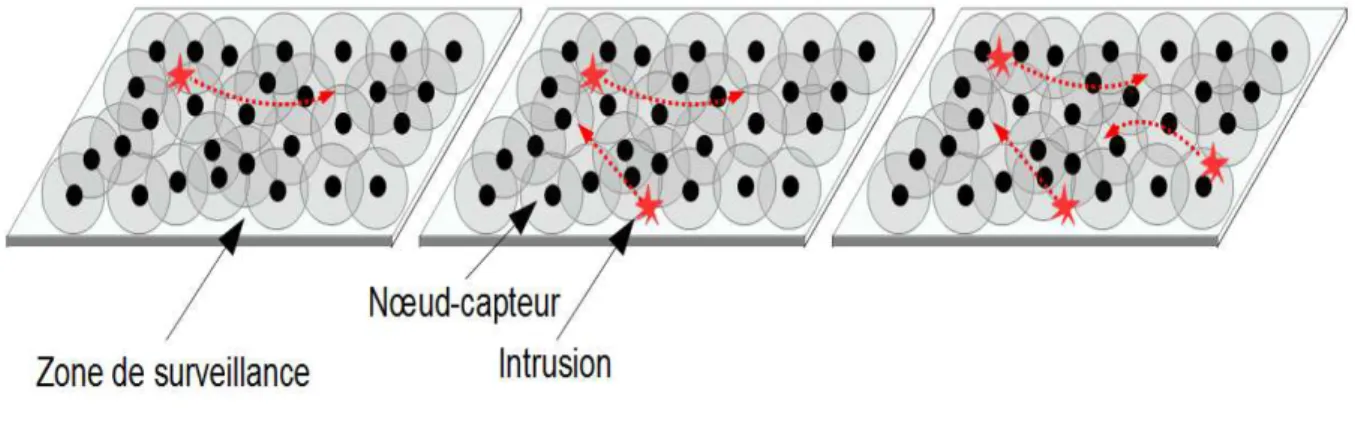
4.3 Mod`ele de sc´enario de multi-intrusion dans une zone de surveillance. . . 37
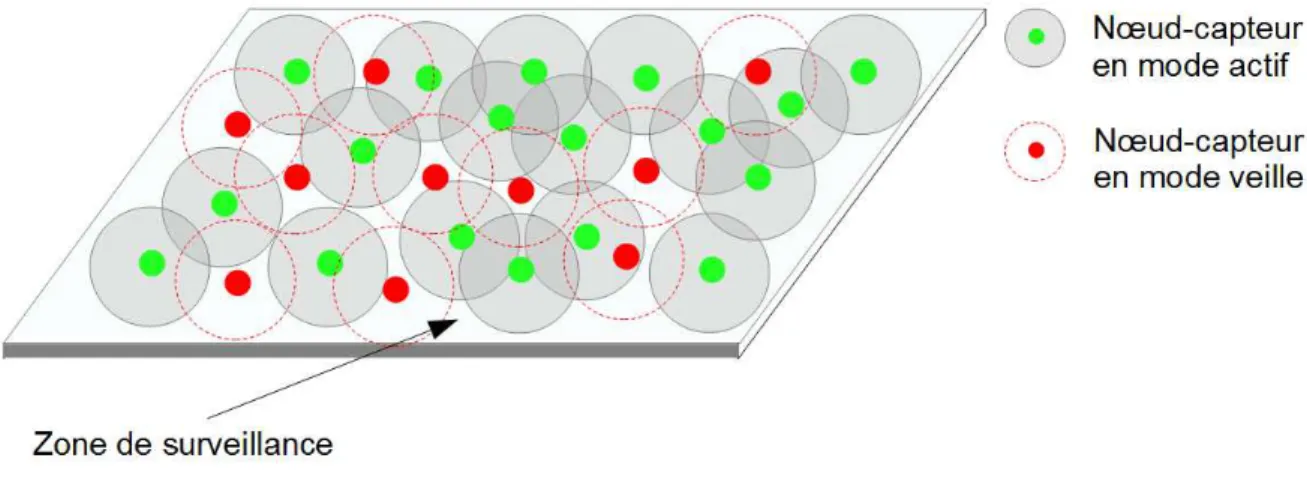
4.4 Disponibilit´e des nœud-capteurs dans une zone de surveillance en termes de couverture. . . 40
4.5 Probabilit´e pour qu’une intrusion soit d´etect´ee par au moins un nœud-capteur en fonction de RSEN S et N, dans une zone de surveillance de dif-f´erente surface Sarea : Sarea = 100 × 100m2 contre Sarea = 200 × 200m2. . . 42
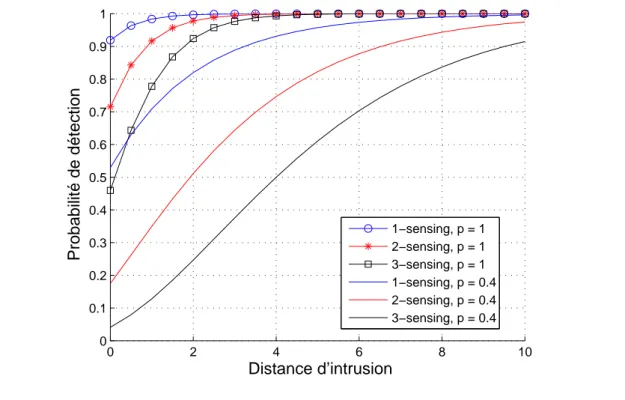
4.6 Probabilit´e de mono/multi-d´etection pour diff´erentes valeurs de taux de disponibilit´e des nœud-capteurs p. . . 43
4.7 Probabilit´e de mono/multi-d´etection pour mono/multi-intrusion. . . 44
5.1 Mod`ele typique de connectivit´e, (a) : r´eseau connect´e, (b) : r´eseau non connect´e. . . 48
5.2 Mod`ele typique de connectivit´e du r´eseau, (a) : 1-connect´e, (b) : 2-connect´e, (c) : 3-connect´e . . . 51
5.3 Disponibilit´e des nœud-capteurs dans une zone de surveillance en termes de connectivit´e. . . 53
tivit´e, (c) : couverture-connectivit´e. . . 55 5.5 Mod`ele de multi-d´etection et connectivit´e, (a) : 3-couverture, (b) : 3-connectivit´e,
(c) : couverture-connectivit´e. . . 58 5.6 Mod`ele de multi-d´etection avec une surface minimale Smin, (a) : 2-d´etection,
(b) : 3-d´etection, (c) : 4-d´etection. . . 60 5.7 Probabilit´e de connectivit´e du r´eseau en fonction de RT RAN S et N, dans
une zone de surveillance de diff´erente surface Sarea : Sarea = 100 × 100m2
contre Sarea = 200 × 200m2. . . 63
5.8 Probabilit´e de connectivit´e de diff´erents degr´es k et de taux p de disponi-bilit´e des nœud-capteurs en fonction de la port´ee de transmission RT RAN S. 64
5.9 Probabilit´e de conectivit´e en fonction de la port´ee de d´etection RSEN S et
de la port´ee de transmission RT RAN S sous la forme d’un carr´e de diff´erents
niveaux de gris. . . 65 5.10 Probabilit´e de connectivit´e dans k-d´etection pour k = 3, 4, 5. . . 66 6.1 Mod`ele typique de la zone de hotspot. . . 70 6.2 Mod`ele typique de la zone de hotspot avec des nœud-capteurs relais candidats. 72 6.3 Diagramme de s´election des nœud-capteurs candidats au routage des paquets. 74 6.4 Archt´ecture de communication du r´eseau de capteurs sans fil. . . 75 6.5 Mod`ele de consommation d’´energie par le nœud-capteur. . . 77 6.6 Taux de livraison des messages d’alerte de MCLsum, MTE et xMREPsum. 78 6.7 Nombre de nœud-capteurs restent en vie de MCLsum, MTE et xMREPsum. 79 6.8 Energie totale consomm´ee de MCLsum, MTE et xMREPsum (Joule). . . . 80´
1
I
NTRODUCTION1.1 Contexte g ´en ´eral
De nombreuses applications industrielles, scientifiques et mˆeme grand public ont be-soin de suivre et de contrˆoler ´eventuellement des ph´enom`enes physiques comme la sur-veillance environnementale et la d´etection de situations d’urgence, notamment les risques d’incendie, les fuites de gaz, le glissement de terrain, la d´etection ou le suivi d’intrusion, etc. La tˆache de surveillance et d’acquisition des donn´ees est d´el´egu´ee aux nœud-capteurs qui int`egrent des composants d’acquisition, de traitement et de communication sans fil dans un seul ´equipement, `a dimension r´eduite et avec un coˆut raisonnable.
L’ensemble des nœud-capteurs qui sont d´eploy´es sur la zone de surveillance forme un r´e-seau de type particulier des r´er´e-seaux Ad-Hoc, appel´e r´er´e-seau de capteurs sans fil - RCSF (Wireless Sensor Network - WSN).
La technologie des RCSFs est cit´ee parmi les technologies ubiquitaires en pleine ´emer-gence afin de r´epondre aux besoins d’applications. Ce type de r´eseau ouvre la voie `a des solutions ´economiquement attrayantes pour la surveillance des champs d’int´erˆet `a distance et sans qu’il y ait besoin d’interventions humaines.
La technique de d´eploiement des nœud-capteurs dans une zone de contrˆole est consi-d´er´ee parmi les points critiques dans la conception et la r´ealisation des RCSFs. Cette technique diff`ere selon l’application du RCSF. Les nœud-capteurs peuvent ˆetre plac´es d’une fa¸con d´eterministe ce qui impose un emplacement appropri´e pour chaque noeud-capteur. On retrouve ce type de d´eploiement dans les applications de contrˆole, les appli-cations multim´edias et les appliappli-cations de surveillance corporelle. Le d´eploiement ici sera trop recommand´e parce que les mesures doivent ˆetre pr´ecises, pertinentes et de qualit´e. Il en est de mˆeme pour les nœuds collecteurs afin d’assurer l’acquisition, l’int´egrit´e et le traitement des mesures captur´ees. Contrairement au d´eploiement d´eterministe o`u on a une connaissance pr´ealable de position de chaque nœud-capteur, le d´eploiement al´eatoire (non d´eterministe) peut ˆetre adopt´e dans certaines situations o`u la zone de surveillance n’est pas accessible (zone hostile). Pour cela, les nœud-capteurs peuvent ˆetre d´eploy´es en les larguant par un avion par exemple, surtout dans les applications de surveillance ext´erieure et environnementale o`u le d´eploiement d´eterministe est non faisable. Ce type de d´eploiement al´eatoire est ´egalement utilis´e dans le cas o`u le nombre de noeud-capteurs `a d´eployer est trop important et le coˆut de placer chacun d’une fa¸con planifi´ee est ´elev´e.
La qualit´e de d´eploiement des nœud-capteurs est d´efinie comme une contrainte ma-jeure lors de la conception et la r´ealisation d’un RCSF, afin d’assurer un meilleur
fonc-connectivit´e du r´eseau, du taux et d´elai de livraison des donn´ees et de la dur´ee de vie du r´eseau de capteurs.
1.2 Probl ´ematiques
Les RCSFs n´ecessitent une technique de d´eploiement d’un ensemble de nœud-capteurs dans une zone de surveillance. Chaque point de cette zone doit ˆetre couvert au moins par un nœud-capteur afin de garantir la couverture du r´eseau en tant que qualit´e de service. L’utilisation de la technique de d´eploiement al´eatoire, qui reste la derni`ere alternative dans le cas des zones de surveillance hostiles, engendre plusieurs d´efis li´es `a la qualit´e de couverture. En effet, il est primordial de savoir dans quelle condition chaque point de la zone de surveillance est couvert tout en respectant la contrainte de la qualit´e de couverture.
Les applications de RCSFs qui utilisent la technique de d´eploiement al´eatoire, sont souvent caract´eris´ees par un nombre de nœud-capteurs plus grand que n´ecessaire. Il parait tr`es probable que les mesures de captures soient corr´el´ees dans le temps et l’espace. En effet, si un ´ev´enement se d´eclenche et se d´etecte par un nœud-capteur, il est fort probable que les nœud-capteurs voisins de ce dernier d´etectent cet ´ev´enement. Ces derniers ont ´egalement des messages d’alerte `a envoyer `a la station de base. Dans ce cas, la question qui se pose est par rapport `a la qualit´e de d´etection de la pr´esence des ´ev´enements, qui a une relation directe avec le degr´e de couverture du r´eseau.
On trouve aussi comme d´efi concernant l’utilisation de la technique de d´eploiement al´eatoire, la qualit´e de connectivit´e du r´eseau qui se d´egrade significativement avec une mauvaise r´epartition des nœud-capteurs sur la zone de surveillance, ce qui peut engendrer une perte de la continuit´e de service de RCSF dus `a l’isolement et la d´econnexion de certains nœud-capteurs du r´eseau.
La moindre d´efaillance ´energ´etique de certains nœud-capteurs peut changer significative-ment la topologie du r´eseau et la d´egradation de la qualit´e de connectivit´e, ce qui implique une r´eorganisation coˆuteuse de RCSF avec le red´eploiement des nœud-capteurs. Le r´eseau doit maintenir un r´egime de connectivit´e suffisant afin qu’il soit robuste contre l’isolement des nœud-capteurs et ne pas avoir une d´egradation au niveau de la qualit´e de service du RCSF. Une qualit´e de connectivit´e suffisante assure ´evidement l’acheminement des pa-quets dans les bonnes conditions, par exemple, l’arriv´ee des messages d’alerte `a la station de base avec une haute probabilit´e et dans le plus bref d´elai, suivant une structure de communication efficace, en termes de consommation d’´energie et le taux de livraison des messages vers la station de base.
En g´en´eral, la couverture et la connectivit´e du r´eseau sont deux m´etriques les plus fondamentales lors de la conception et la r´ealisation d’un RCSF. La premi`ere m´etrique consiste `a assurer que chaque endroit de la zone de surveillance est bien couvert tout en assurant un degr´e de couverture exig´e par l’application de RCSF. Alors que la deuxi`eme m´etrique est affect´ee par les changements de la topologie du r´eseau dus `a l’utilisation de la technique du d´eploiement al´eatoire et la d´efaillance de certains nœud-capteurs.
1.3 Principales contributions de la th `ese
Les contributions de cette th`ese porteront sur les quatre principaux axes de recherche suivants :
• Couverture du r´eseau : Nous proposons un mod`ele de d´etection probabiliste appropri´e aux diff´erents sc´enarios de d´etection d’intrusion. Nous avons bien adapt´e ce mod`ele dans le cas o`u l’intrusion sera d´etect´ee au moins par un nœud-capteurs, il s’agit de mono-d´etection. Ce mod`ele est ´egalement adapt´e dans le cas de multi-d´etection pour assurer que toute intrusion soit d´etect´ee au moins par un certain nombre de nœud-capteurs, pour accroˆıtre la pr´ecision de la d´etections et pour diminuer les risques de fausse alerte de la pr´esence de l’intrusion dans la zone de surveillance. Dans le cas d’un sc´enario d’intrusion plus r´ealiste, o`u la zone de surveillance peut avoir plusieurs intrusions non autoris´ees, on d´eveloppe un mod`ele de d´etection appropri´e `a ce type de sc´enario, not´e multi-intrusion. Ces mod`eles de d´etection d’intrusion sont r´esum´es comme suit :
— Mono-d´etection pour mono-intrusion ; — Multi-d´etection pour mono-intrusion ; — Mono-d´etection pour multi-intrusion ; — Multi-d´etection pour multi-intrusion.
• Connectivit´e du r´eseau : On propose un mod`ele de la connectivit´e qui fournit des configurations de base pour r´epondre aux contraintes impos´ees par les ap-plications de RCSF en termes de qualit´e de connectivit´e du r´eseau, parce que le r´egime de la connectivit´e est centr´e autour des conditions minimales et suffisantes pour assurer la connectivit´e, il existe au moins une route entre chaque paire de nœud-capteurs du r´eseau.
• Couverture-connectivit´e int´egr´ee : On propose un mod`ele de la couverture-connectivit´e int´egr´ee pour faire face aux d´efis du d´eploiement al´eatoire. Un mod`ele probabiliste appropri´e pour pr´evoir des conditions suffisantes pour garantir `a la fois la couverture et la connectivit´e du r´eseau, tout en respectant les exigences de l’ap-plication de RCSF. Nous avons prouv´e par une analyse de probabilit´e la condition RT RAN S ≥ 2RSEN S, n´ecessaire et suffisante, qui donne la configuration de base de
la port´ee de d´etection RSEN S et de la port´ee de transmission RT RAN S des
nœud-capteurs, afin de garantir la k-couverture tout en maintenant la k-connectivit´e du RCSF.
• Architecture de communication : On propose un protocole de routage appro-pri´e pour un bilan ´energ´etique optimal et pour un taux de livraison ´elev´e, appel´e MCLsum (Sum Minimum Cost Link). Ce protocole est compos´e de deux tech-niques. La premi`ere technique appliqu´ee `a l’ensemble de r´eseau qui tient compte des sp´ecificit´es des RCSFs comme l’´energie r´esiduelle des nœud-capteurs et la dis-tance Euclidienne ente eux, afin de combiner entre une distribution uniforme de la consommation d’´energie et la s´election des routes optimales en termes de distance. La deuxi`eme technique appliqu´ee sur une zone critique appel´ee hotspot, bas´ee sur une s´election optimale des nœud-capteurs voisins de la station de base en fonction de leurs ´energies r´esiduelles.
1.4.1 Revues internationales
1. N. Assad, B. Elbhiri, M. A. Faqihi, M. Ouadou, and D. Aboutajdine, “Efficient deployment quality analysis for intrusion detection in wireless sensor networks”. Wireless Networks, Springer Journal, 2015, pp. 1-16.
2. N. Assad, B. Elbhiri, M. A. Faqihi, M. Ouadou, and D. Aboutajdine, “Analysis of the Deployment Quality for Intrusion Detection in Wireless Sensor Networks” Journal of Computer Networks and Communications, vol. 2015, Article ID 812613, 7 pages, 2015. doi :10.1155/2015/812613.
3. N. Assad, B. Elbhiri, M. A. Faqihi, M. Ouadou, D. Aboutajdine, “On the Deploy-ment Quality for Multi-intrusion Detection in Wireless Sensor Networks”, Sprin-ger International Publishing, Series Lecture Notes in Electrical Engineering, May, 2015. (in press)
4. N. Assad, B. Elbhiri, S. E. Fkihi, M. A. Faqihi, M. Ouadou, D. Aboutajdine, “Short : Intrusion Detection Quality Analysis for Homogeneous Wireless Sensor Networks”, Book Chapter, Networked Systems, Springer International Publishing, Volume 8593 of the series Lecture Notes in Computer Science pp 324-329, May, 2014.
1.4.2 Conf ´erences internationales
1. N. Assad, B. Elbhiri, M. A. Faqihi, M. Ouadou, D. Aboutajdine, “On the De-ployment Quality for Multi-intrusion Detection in Wireless Sensor Networks”. In Mediterranean Conference on Information & Communication Technologies’2015, May 7-9, Sa¨ıdia, Morocco.
2. N. Assad, B. Elbhiri, M. A. Faqihi, M. A., M. Ouadou, D. Aboutajdine, (2014, August). Short : Intrusion Detection Quality Analysis for Homogeneous Wireless Sensor Networks. In Networked Systems : Second International Conference, NE-TYS 2014, Marrakech, Morocco, May 15-17, 2014. Revised Selected Papers (Vol. 8593, p. 324). Springer.
3. N. Assad, B. Elbhiri, S. E. Fkihi, M. A. Faqihi, M. Ouadou, D. Aboutajdine, “Sum Minimum Cost Link Algorithm for Wireless Sensor Networks” In SENSORCOMM-IARIA 2013 : The Seventh International Conference on Sensor Technologies and Applications, August 25-31, 2013 - Barcelona, Spain.
4. B. Elbhiri, S. E. Fkihi, R. Saadane, N. Assad, A. Jorio, D. Aboutajdine, (2013, April). A new spectral classification for robust clustering in wireless sensor net-works. In Wireless and Mobile Networking Conference (WMNC), 2013 6th Joint IFIP (pp. 1-10). IEEE.
1.5 Organisation de la th `ese
Ce manuscrit s’articule autour de sept chapitres :
— Chapitre 2 - R´eseaux de capteurs sans fil : vue g´en´erale et d´efis de conception : Ce chapitre expose les principaux mod`eles de RCSF et les d´efinitions de ses composants, ainsi que les diff´erentes architectures li´ees `a ce type de r´eseau et leurs diff´erentes applications. Nous finissons ce chapitre en citant les diff´erents facteurs de conception des RCSFs.
— Chapitre 3 - Mod`ele de couverture et de connectivit´e des RCSFs : Ce chapitre pr´esente les notations et les concepts fondamentaux des mod`eles de la couverture et de la connectivit´e du r´eseau, qui sont utilis´es tout au long de ce manuscrit.
— Chapitre 4 - Solution propos´ee pour la d´etection d’intrusion dans les RCSFs : Dans ce chapitre, nous d´ecrivons notre mod`ele probabiliste de d´etec-tion d’intrusion qui fournit des configurad´etec-tions de base pour assurer une qualit´e de d´etection d’intrusion ´elev´ee, tout en garantissant la couverture de la zone de surveillance. Ce mod`ele d´epend de divers param`etres tels que la port´ee de d´etec-tion, la port´ee de transmission, la densit´e des nœud-capteurs, la disponibilit´e des nœud-capteurs et la mobilit´e d’intrusion dans la zone de surveillance. Par la suite, nous avons adapt´e notre mod`ele de d´etection d’intrusion `a la mono-d´etection et `a la multi-d´etection, pour mod´eliser les diff´erents sc´enarios de d´etection.
— Chapitre 5 - Solution propos´ee pour la garantie de la couverture-connectivit´e des RCSFs : Nous traitons dans ce chapitre les deux d´efis ma-jeurs engendr´es par l’utilisation de la technique du d´eploiement al´eatoire, li´es `a la connectivit´e et la couverture-connectivit´e int´egr´ee. Nous d´eveloppons aussi dans ce chapitre un mod`ele de configuration de base, qui donne la relation entre la port´ee de d´etection RSEN S et la port´ee de transmission RT RAN S, afin de garantir `a la fois
la couverture et la connectivit´e.
— Chapitre 6 - Proposition d’un protocole de routage pour les RCSFs multi-sauts : L’acheminement des paquets dans le r´eseau, tout en respectant la contrainte d’´energie et le taux de livraison, font l’objet d’une description d´etaill´ee dans ce chapitre. Un r´eseau ne peut accomplir son objectif que tant qu’il est ”en vie”, donc la dur´ee de vie pr´evue est critique dans tout d´eploiement du r´eseau de capteurs. Nous proposons un protocole de routage, appropri´e pour un bilan ´energ´etique optimal et pour un taux de livraison ´elev´e, appel´e MCLsum (Sum Minimum Cost Link).
— Chapitre 7 - Conclusion g´en´erale et perspectives : Ce chapitre conclut le manuscrit et rappelle les diff´erentes contributions r´ealis´ees tout au long de ce travail de recherche, et met en relief les perspectives de recherche futures.
2
R´
ESEAUX DE CAPTEURS SANS FIL:
VUE G´
EN´
ERALEET D
´
EFIS DE CONCEPTIONSommaire
2.1 Introduction . . . 7
2.2 Architecture physique d’un nœud-capteur . . . 8
2.3 Architecture des r´eseaux de capteurs sans fil . . . 9
2.4 Caract´eristiques des r´eseaux de capteurs sans fil . . . 10
2.4.1 D´eploiement des nœud-capteurs . . . 10
2.4.2 Topologie du r´eseau . . . 11
2.4.3 Couverture du r´eseau . . . 12
2.4.4 Connectivit´e du r´eseau . . . 13
2.4.5 Couverture-connectivit´e du r´eseau . . . 14
2.4.6 R´eseau de communication . . . 14
2.4.7 Energie et dur´ee de vie du r´eseau . . . .´ 15
2.4.8 Diff´erents facteurs de conception des r´eseaux de capteurs sans fil 16
2.5 Domaines d’applications des r´eseaux de capteurs sans fil . . . 17
2.5.1 Applications militaires . . . 17
2.5.2 Applications de suivi d’´ecosyst`emes et de surveillance
environ-nementale . . . 18
2.5.3 Autres applications . . . 19
2.6 Conclusion . . . 20
Dans ce chapitre, nous exposons les principaux mod`eles de r´eseaux de capteurs sans fil et les d´efinitions de ses composants, ainsi que les diff´erentes architectures de ce type de r´eseau. Le fonctionnement d’un RCSF est souvent corr´el´e avec l’absence d’infrastructure, ´energie limit´ee et d´eploiement sur des zones de surveillance hostiles. Nous verrons par la suite que les r´eseaux de capteurs posent de nombreux questions en termes de couverture et de connectivit´e, afin de r´epondre aux exigences d’applications de ce type de r´eseaux. Nous finirons ce chapitre en citant les diff´erents facteurs cl´es de conception des r´eseaux de capteurs sans fil qui ont un impact direct sur leur qualit´e de services.
2.1 Introduction
Au cours des derni`eres d´ecennies, nous avons assist´e `a une miniaturisation et une ´evolution technologique rapide des mat´eriels informatiques. Cette tendance de
miniaturication sans fil, appel´ee r´eseaux de capteurs sans fil RCSFs (Wireless Sensor Networks -WSNs). Actuellement, la technologie des r´eseaux de capteurs sans fil est cit´ee parmi les technologies ubiquitaires en pleine ´emergence au niveau des r´eseaux de communication sans fil. Ce type de r´eseau ouvre la voie `a des solutions ´economiquement attrayantes dans la vie quotidienne pour la surveillance environnementale `a distance.
Les r´eseaux de capteurs sans fil sont g´en´eralement compos´es de plusieurs dispositifs ´elec-troniques con¸cus pour faire des mesures physiques. Ces dispositifs ´elec´elec-troniques, appel´es nœud-capteurs (sensor nodes), int`egrent des composants d’acquisition, de traitement et de communication sans fil dans un seul ´equipement, `a dimension r´eduite et avec un coup raisonnable (Akyildiz et al., 2007), (Akyildiz et al., 2002).
Les nœud-capteurs sont d´eploy´es sur une zone d’int´erˆet afin de r´epondre aux besoins des applications des RCSFs, en se basant sur l’effort collaboratif des nœud-capteurs op´erant d’une fa¸con autonome et communiquant entre eux `a travers un canal de transmission sans fil. Les exemples typiques des mesures de grandeurs physiques incluent la temp´erature, l’humidit´e, le bruit, etc.
En termes de domaine d’applications, les r´eseaux de capteurs sans fil ont pour objectif de suivre des ph´enom`enes physiques comme la surveillance environnementale ou la d´etection de situations d’urgence, tels que les risques d’incendie, des fuites de gaz, de glissements de terrain, d´etection/suivi d’intrusion, etc.
2.2 Architecture physique d’un nœud-capteur
Un nœud-capteur est un dispositif ´electronique qui a pour objectif de r´ecolter les donn´ees de champs de capture, les traiter et les envoyer `a travers un r´eseau de com-munication. Ce nœud-capteur est compos´e essentiellement de quatre unit´es ou modules correspondant chacun `a une tˆache particuli`ere, un module d’acquisition, de traitement, de transmission et la source d’´energie qui alimente l’ensemble (voir la Figure 2.1). Ces modules sont pr´esent´es comme suit :
Module d’acquisition
Compos´e d’un (ou plusieurs) capteur qui obtient des mesures (grandeurs physiques) du champ de capture et d’un convertisseur analogique/num´erique qui convertit la mesure captur´ee et la transmet par la suite au module de traitement.
Module de traitement
Compos´e d’un micro-contrˆoleur de fr´equence assez faible, utilis´e pour r´epondre `a la contrainte de faible consommation de RCSFs, d’une m´emoire de taille assez moyenne et d’un syst`eme d’exploitation sp´ecifique pour les nœud-capteurs. Le module de traitement acquiert les donn´ees en provenance du module d’acquisition et les envoie au module de transmission.
Figure 2.1 – Architecture physique d’un nœud-capteur.
Module de transmission
Le module de transmission du nœud-capteur est un dispositif radio qui est responsable de toutes les ´emissions et les r´eceptions de donn´ees via un canal de communication sans fil.
Source d’ ´energie
Le nœud-capteur est muni g´en´eralement d’une batterie qui alimente tous ses com-posants ´electroniques comme le montre la Figure 2.1. Cette batterie, a part qu’elle est limit´ee, dans la plupart des cas, elle n’est ni rechargeable ni rempla¸cable. Pour ce fait, l’´energie est la ressource la plus pr´ecieuse puisqu’elle influe directement sur la dur´ee de vie du nœud-capteur.
Il existe d’autres composants additionnels qui peuvent ˆetre ajout´es, notamment le syst`eme de localisation GPS (Global Positioning System), le composant de mobilit´e per-mettant le d´eplacement de nœud-capteur, le g´en´erateur d’´energie, etc.
2.3 Architecture des r ´eseaux de capteurs sans fil
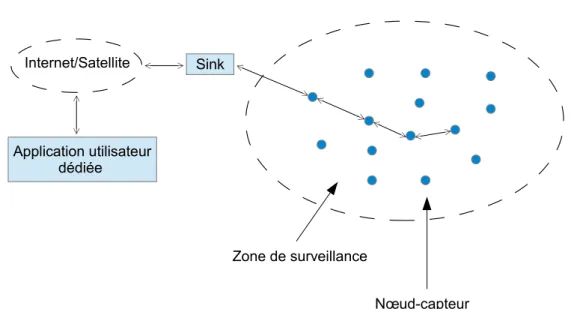
Un r´eseau de capteurs sans fil est d´efini comme un type particulier des r´eseaux Ad-Hoc1, g´en´eralement constitu´e de nombreux nœud-capteurs d´eploy´es dans un champ de
capture. Ces nœud-capteurs sont reli´es `a une ou plusieurs passerelles (Sinks) qui per-mettent l’interconnexion avec d’autres r´eseaux (Internet, Satellite, ...) et la r´ecup´eration des donn´ees captur´ees du champ.
Les nœud-capteurs qui forment un RCSF communiquent entre eux via un canal radio construisant un r´eseau de communication pour le partage d’information et le traitement
1. Un r´eseau Ad-Hoc, appel´e g´en´eralement MANET (Mobile Ad-Hoc Network), est une collection d’unit´es mobiles munies d’interfaces de communication sans fil, formant un r´eseau capable de s’organiser sans aucune infrastructure fixe ou administration centralis´ee. Dans de tels environnements, les unit´es se comportent comme des hˆotes et/ou des routeurs.
Sink Application utilisateur dédiée Internet/Satellite Nœud-capteur Zone de surveillance
Figure 2.2 – Mod`ele d’architecture des r´eseaux de capteurs sans fil.
coop´eratif. L’utilisateur peut adresser ses requˆetes aux nœud-capteurs en pr´ecisant l’infor-mation d’int´erˆet. Les donn´ees collect´ees par les nœud-capteurs sont achemin´ees, `a l’aide d’un protocole de routage con¸cu sp´ecialement pour les RCSFs, vers la station de base (Sink) qui constitue la passerelle vers une application utilisateur d´edi´ee (Wang, 2008), (Nazir et Hasbullah, 2010).
Un exemple typique de r´eseau de capteurs sans fil est illustr´e dans la Figure 2.2.
En fonction d’exigence d’applications de r´eseaux de capteurs sans fil, la technique de d´eploiement des nœud-capteurs peut ˆetre d´eterministe, alors que dans certaines situations diff´erentes dont on n’a pas l’acc`es aux zones de surveillance, le d´eploiement al´eatoire reste la seule solution. Afin de construire une vue globale de la r´egion contrˆol´ee, qui est devenue accessible `a l’application utilisateur, les nœud-capteurs ´echangent des informations entre eux sur la zone de surveillance o`u ils sont d´eploy´es.
2.4 Caract ´eristiques des r ´eseaux de capteurs sans fil
L’int´egration des r´eseaux de capteurs sans fil dans la vie quotidienne a rendu leur mode de fonctionnement diff´erent de celui du r´eseau Ad-Hoc traditionnel. Ils poss`edent des caract´eristiques particuli`eres qui rendent la conception de ce type de r´eseau non triviale (Chong et Kumar, 2003). Nous citons les diff´erentes caract´eristiques li´ees aux r´eseaux de capteurs sans fil :
2.4.1 D ´eploiement des nœud-capteurs
La technique de d´eploiement des nœud-capteurs dans une zone de surveillance est cit´ee parmi les points critiques dans le design des r´eseaux de capteurs. Elle se diff`ere selon l’application de RCSF. Cette technique est ´egalement d´efinie comme une contrainte qui s’impose dans la conception des RCSFs afin d’assurer un meilleur fonctionnement vis-`a-vis
de la qualit´e de couverture de la zone de surveillance, de la connectivit´e du r´eseau, du taux et du d´elai de livraison des donn´ees et de la dur´ee de vie du r´eseau.
D’une part, les nœud-capteurs peuvent ˆetre plac´es d’une fa¸con d´eterministe, o`u on a une connaissance pr´ealable sur la zone de surveillance. D’autre part, dans certaines situations difficiles `a contrˆoler, en raison de l’inaccessibilit´e de la zone de surveillance (zone hostile) ou de grande taille du r´eseau de capteurs, le recours `a un d´eploiement al´eatoire peut ˆetre la seule alternative. En cons´equence, le choix de la technique de d´eploiement d´epend fortement de l’application de RCSF, de la zone de surveillance o`u les nœud-capteurs sont d´eploy´es et du type de nœud-capteur utilis´e.
2.4.1.1 D ´eploiement d ´eterministe
On retrouve le type de d´eploiement d´eterministe dans les applications de contrˆole, de multim´edia et de surveillance corporelle. Le d´eploiement dans ce cas devient trop recommand´e parce que les mesures doivent ˆetre pr´ecises, pertinentes et de qualit´e. Cela impose donc un emplacement appropri´e des nœud-capteurs. Il en est de mˆeme pour les nœuds collecteurs afin d’assurer l’acquisition, l’int´egrit´e et le traitement de ces mesures. 2.4.1.2 D ´eploiement al ´eatoire
Contrairement au d´eploiement d´eterministe o`u on a une connaissance pr´ealable de chaque position de nœud-capteur, le d´eploiement al´eatoire (non d´eterministe) peut ˆetre adopt´e dans certaines situations o`u la zone de surveillance n’est pas accessible. Les nœud-capteurs peuvent ˆetre d´eploy´es, par exemple, en les larguant par un avion, surtout dans les applications de surveillance ext´erieure et environnementale caract´eris´ees par une grande taille du r´eseau. En effet, le nombre de nœud-capteurs `a d´eployer est trop important et le coˆut de placer chacun d’une fa¸con planifi´ee est ´elev´e.
Ce type de d´eploiement est fortement recommand´e dans les sc´enarios d’application de grande taille o`u les nœud-capteurs doivent d´etecter les ´ev´enements, citons : un feu dans une forˆet, une inondation, un tremblement de terre, une intrusion d’ennemi, etc. Pouvant survenir `a tout moment et en tout lieu. Bien qu’on ne puisse pas planifier le d´eploiement des nœud-capteurs dans ce type de sc´enario, elle ne peut pas ˆetre optimal du moment que cela peut r´esulter en des zones tr`es denses et d’autres moins denses ou mˆeme d´econnect´ees.
2.4.2 Topologie du r ´eseau
Dans les applications de RCSFs qui n´ecessite une forte densit´e dans la zone de sur-veillance, il faut que les nœud-capteurs soient capables d’adapter leur fonctionnement afin de maintenir la topologie souhait´ee, et r´epondre ainsi aux exigences des applications de RCSFs.
Lors du passage `a l’´echelle, ce type de r´eseau de capteurs pr´esente une importante contrainte de topologie dynamique. En effet, la densit´e du r´eseau se varie avec le temps. Dans un v´eritable r´eseau de capteurs, les changements de topologie sont fr´equents dˆu `a l’´epuise-ment des batteries ou bien aux influences de l’environnel’´epuise-ment et conditions variables du canal sans fil. Certains auteurs propose le red´eploiement comme solution, autrement dit, ajouter de nouveaux nœud-capteurs dans le r´eseau pour une remise `a jour de la topo-logie souchet´ee. Le changement de la topotopo-logie du r´eseau se produit aussi en raison des
Figure 2.3 – Couverture du r´eseau.
mises en veille alternatives des nœud-capteurs. Ce type de topologie dynamique est trop recommand´e pour assurer une dur´ee de vie maximum du r´eseau de capteurs.
2.4.3 Couverture du r ´eseau
Dans une zone de surveillance o`u les nœud-capteurs sont d´eploy´es, chaque point doit ˆetre couvert au moins par un nœud-capteur afin de garantir la couverture du r´eseau en tant que qualit´e de service de RCSF, voire la Figure 2.3. Les applications de RCSFs ont g´en´eralement tendance `a d´eployer plus de nœud-capteurs que n´ecessaires pour assurer la couverture de chaque endroit de la zone de surveillance. Cet exc`es conduit `a une redon-dance de nœud-capteurs, des r´egions surveill´ees par deux ou plusieurs capteurs en mˆeme temps (Mulligan et Ammari, 2010), (Huang et Tseng, 2005).
Parmi les d´efis qui s’imposent lors de la phase du d´eploiement des nœud-capteurs est le probl`eme de la couverture. Ce probl`eme m`ene `a se demander dans quelle condition de chaque point de la zone d’int´erˆet est surveill´es au moins par un capteur tout en respectant la contrainte de couverture.
La qualit´e de couverture est fortement li´ee `a la technique de d´eploiement des nœud-capteurs, par exemple le d´eploiement al´eatoire engendre le probl`eme de la redondance des nœud-capteurs dans la zone de surveillance, ce qui conduit `a une consommation d’´energie de plus.
Il ´etait possible de r´eduire consid´erablement la consommation d’´energie du r´eseau de capteurs en diminuant le degr´e de couverture. En effet, certains nœud-capteurs doivent se mettre en veille/actif afin de prolonger au maximum la dur´ee de vie du r´eseau tout en assurant une couverture totale de la zone surveill´ee et en maintenant la connectivit´e du r´eseau.
Figure 2.4 – Connectivit´e du r´eseau.
2.4.4 Connectivit ´e du r ´eseau
Dans un r´eseau de capteurs sans fil, les nœud-capteurs peuvent avoir des d´efaillances dues `a l’´epuisement de leurs batteries. Ainsi, il y a une forte possibilit´e de diminuer la qualit´e de connectivit´e du r´eseau, voire perdre la continuit´e du service. En effet, La moindre d´efaillance ´energ´etique d’un nœud-capteur peut donc changer significativement la topologie du r´eseau et imposer une r´eorganisation coˆuteuse de ce dernier. Un exemple de distribution des nœud-capteurs sur une zone de surveillance, qui forme un r´eseau connect´e, est bien illustr´e dans la Figure 2.4.
Les nœud-capteurs sont con¸cus pour accomplir la tˆache de l’application du RCSF durant des mois voire des ann´ees. Pour cela, la capacit´e ´energ´etique doit ˆetre g´er´ee effi-cacement `a travers la conception des protocoles de communications afin de supporter les services hauts niveaux, les op´erations temps r´eel et de s’adapter facilement aux change-ments de la topologie du r´eseau (Pishro-Nik et al., 2009). Les r´eseaux de capteurs sans fil engendrent d’autres d´efis qui diminuent la qualit´e de connectivit´e du r´eseau, `a sa-voir les conditions environnementales de la zone de surveillance (obstacles, interf´erence, etc.), le d´eploiement al´eatoire qui s’effectue souvent par largage par avion et qui entraine par cons´equent une forte variation de densit´e des nœud-capteurs sur la mˆeme zone de surveillance, dont la connectivit´e n’est pas toujours assur´ee. Beaucoup de solutions sont propos´ees dans la litt´erature afin de minimiser l’instabilit´e de la topologie du r´eseau. Parmi ces solutions, il existe celles qui reposent soit sur le d´eploiement de nœud-capteurs suppl´ementaires (red´eploiement) soit sur la mobilit´e.
Figure 2.5 – Couverture-connectivit´e du r´eseau.
2.4.5 Couverture-connectivit ´e du r ´eseau
Dans un r´eseau de capteurs sans fil, la couverture-connectivit´e du r´eseau est une m´etrique majeure dans la phase de la conception et la r´ealisation des RCSFs, puisque elles contribuent `a la garantie de la qualit´e de service.
La m´etrique de couverture consiste `a garantir la couverture de chaque endroit de la zone de surveillance, tout en assurant un degr´e de couverture exig´e par l’application de RCSF, notamment dans le cas des applications de surveillance et de d´etection des intrusions non autoris´ee. Cela, donne une pr´ecision sur les mesures captur´ees par les nœud-capteurs.
Alors que la m´etrique de connectivit´e, d´epend essentiellement de l’existence au moins une route entre chaque deux nœud-capteurs du r´eseau. Cette m´etrique de connectivit´e est affect´ee par les changements de topologie du r´eseau dus `a la technique du d´eploiement al´eatoire et la d´efaillance de certains nœud-capteurs.
Ce qui a pour cons´equence, le maintien de la qualit´e de service en termes de couverture et de connectivit´e, sont deux exigences les plus importantes dans les r´eseaux de capteurs. La Figure 2.5 illustre un mod`ele de couverture-connectivit´e du r´eseau.
2.4.6 R ´eseau de communication
Apr`es la phase de d´eploiement des nœud-capteurs sur une zone de surveillance et assurer la connectivit´e du r´eseau, chaque nœud-capteur devrait avoir la capacit´e de com-muniquer avec d’autres nœud-capteurs `a travers un r´eseau de communication, et r´epondre ainsi aux services souhait´es de l’application de RCSF. Afin de permettre les communica-tions entre des nœud-capteurs dans un r´eseau d´eploy´e hors de port´ee de transmission, des protocoles de routage sp´eciaux bas´es sur un mode de communication de multi-saut est
n´ecessaire. Un r´eseau de capteurs sans fil ´etant multi-sauts, une route (si elle existe) doit ˆetre trouv´ee entre le nœud-capteur source et le nœud-capteur destinataire. Cette route doit, de plus, garantir les contraintes impos´ees par l’application de RCSF. Le protocole de routage permet la d´etermination d’une telle route. Pour cela, ce dernier d´etermine une route en se basant sur les informations collect´ees par les nœud-capteurs du r´eseau qui sont rattach´ees aux contraintes de qualit´e de service que le r´eseau doit respecter. Les informations sur le d´elai entre nœud-capteurs voisins, sur le coˆut ´energ´etique et l’´energie r´esiduelle des nœud-capteurs seront collect´ees lorsqu’une application de RCSF d´esire la garantie du bon fonctionnement de communication r´eseau. Ces informations pr´esentent, dans la plupart des cas, les contraintes de conception d’un tel protocole de routage de RCSF.
2.4.7 ´Energie et dur ´ee de vie du r ´eseau
Dans les r´eseaux de capteurs sans fil, le nœud-capteur est aliment´e principalement par une batterie qui constitue une source ´energ´etique. Les RCSFs doivent fonctionner tout en respectant un bilan ´energ´etique con¸cu pour une dur´ee de vie de plusieurs mois, voire de quelques ann´ees, or la recharge des batteries est souvent trop coˆuteuse et parfois impossible pour des r´eseaux de centaines de nœud-capteurs ou des zones de surveillance hostiles.
Pour concevoir un mod`ele efficace en termes de consommation d’´energie, il est for-tement recommand´e de faire d’abord une analyse des diff´erentes formes de dissipation d’´energie des nœud-capteurs. Les auteurs dans le domaine de recherche de consommation d’´energie des nœud-capteurs, ont conclu que le module radio occupe une partie importante sur la consommation totale d’´energie d’un nœud-capteur, cette ´energie est beaucoup plus ´elev´ee que celle dissip´ee par l’unit´e de traitement. La transmission d’un bit d’information peut consommer autant que l’ex´ecution de quelques milliers d’instructions par le module de traitement de donn´ees. En effet, la consommation d’´energie par le module radio d´epend directement de leur modes de fonctionnement.
On peut distinguer divers modes de fonctionnement d’un nœud-capteur : ´emission, r´eception, ”idle” (ou ´ecoute sans communication), sommeil et le passage d’un mode `a un autre. En comparant l’´energie consomm´ee par ces diff´erents modes de fonctionne-ment, nous remarquons que le mode ”idle” induit une consommation d’´energie significa-tive, presque ´egale `a la consommation en mode r´eception. Ainsi, il est trop recommand´e d’´eteindre compl`etement le module radio plutˆot que de passer au mode ”idle” quand l’on a ni `a ´emettre ni `a recevoir de donn´ees. La transition entre les modes de fonctionnement engendre aussi une dissipation d’´energie.
En outre, il existe d’autres formes de dissipation d’´energie telles que l’´energie de d´etection d’´ev`enements qui repr´esente l’´energie consomm´ee par un nœud-capteur lors de l’activation du module d’acquisition et de collecte des mesures de la zone de surveillance. Le coˆut de cette ´energie d´epend du type sp´ecifique du nœud-capteur utilis´e (image, son, temp´erature, etc.) et des tˆaches (´echantillonnage et conversion des signaux physiques en signaux ´electriques et conversion analogique/num´erique, etc.) qui lui sont assign´es. On trouve aussi un autre type de dissipation d’´energie, l’´energie consomm´ee par le module de traitement des donn´ees au niveau des op´erations, lecture/´ecriture en m´emoire.
de la consommation d’´energie de chaque module d’un nœud-capteur, en raison du grand nombre de plates-formes commerciales existantes. Cependant, des exp´erimentations ont montr´e que le module radio, responsable de toute transmission de donn´ees, est cit´e parmi les composants d’un nœud-capteur les plus consommateurs en ´energie.
2.4.8 Diff ´erents facteurs de conception des r ´eseaux de capteurs sans fil
Les facteurs et contraintes `a relever lors de la conception et la r´ealisation des r´e-seaux de capteurs sans fil sont nombreux et divers, parmi lesquels nous citons le passage `a l’´echelle, la pr´ecision des grandeurs captur´ees, l’´energie, la tol´erance aux pannes des nœud-capteurs, etc. Ces facteurs importants servent comme directives pour la conception des algorithmes et protocoles d´edi´es sp´ecialement aux RCSFs. Ils sont consid´er´es ´egale-ment comme m´etriques de comparaison de performances entre les diff´erents travaux de recherche.
Passage `a l’ ´echelle
Dans certaines applications de RCSFs, le nombre de nœud-capteurs `a d´eployer peut ˆetre de l’ordre de plusieurs centaines ou peut ˆetre des milliers. Ainsi, le r´eseau de capteurs doit assurer la qualit´e de service pr´evue mˆeme avec une densit´e forte des nœud-capteurs et avec un grand nombre d’´ev´enements `a traiter. En effet, le passage `a l’´echelle est cit´e parmi les contraintes de conception des r´eseaux de capteurs. Les m´ethodes et les algorithmes d´edi´es aux RCSFs doivent ˆetre capables de fonctionner efficacement et traiter un grand nombre d’´ev`enements.
Pr ´ecision
Le besoin de la pr´ecision des mesures captur´ees est li´e au choix du module d’acquisition d’une part, et la coop´eration des nœud-capteurs, d’autre part. Pour assurer la qualit´e de pr´ecision pr´evue d’une application de RCSF d´edi´ee, un mod`ele de coop´eration des nœud-capteurs doit ˆetre mis en place.
´Energie
Dans un r´eseau de capteurs, les nœud-capteurs sont aliment´es par des batteries. La contrainte d’´energie est la caract´eristique la plus critique que les auteurs prennent en consid´eration lors de la conception des protocoles d´edi´es `a ce type de r´eseau, tout en respectant un bilan ´energ´etique con¸cu pour une dur´ee de vie de plusieurs mois, voire de quelques ann´ees.
Tol ´erance aux pannes
Parmi les cons´equences non souhait´ees de la technique de d´eploiement al´eatoire, cer-tains nœud-capteurs peuvent devenir d´efaillants et non op´erationnels dˆu `a l’´epuisement d’´energie, l’endommagement physique et l’isolement du r´eseau. Lors de la conception des RCSFs, les protocoles doivent atteindre un niveau de tol´erance aux pannes des nœud-capteurs, cela d´epend fortement aux applications utilisateurs. Dans certaines applications,
le niveau de tol´erance aux pannes doit ˆetre ´elev´e, comme les applications de surveillance et de contrˆole de champs d’int´erˆet dont les mesures captur´ees sont tr`es critiques. Alors que la tol´erance aux pannes devient faible dans le cas de d´eploiement d´eterministe o`u on a un contrˆole direct sur les nœud-capteurs.
Autres facteurs de conception des r ´eseaux de capteurs sans fil
On retrouve aussi parmi les facteurs et les contraintes qu’il faut bien prendre en consid´eration lors de la conception des RCSFs, les facteurs et contraintes qui r´epondent aux exigences des applications :
— Contrairement aux r´eseaux traditionnels, les RSCFs sont caract´eris´es par la pro-pri´et´e d’absence d’infrastructure pr´eexistante et de tout genre d’administration centralis´ee ;
— La bande passante limit´ee est consid´er´ee comme une des caract´eristiques primor-diales des r´eseaux bas´es sur la communication sans fil utilisant un m´edium de communication partag´e. Le fait que la bande passante r´eserv´ee `a un nœud-capteur est limit´ee rend difficile de concevoir des techniques de partage d’acc`es au m´edium de communication ;
— Le choix de la technique de d´eploiement des nœud-capteurs, entre le d´eploiement planifi´e dont on a une connaissance sur chaque position des nœud-capteurs. Dans le cas contraire, le d´eploiement al´eatoire sera la seule alternative dans certaines circonstances dont les nœud-capteurs sont al´eatoirement distribu´es sur une zone de surveillance ;
— Les capteurs peuvent ˆetre attach´es `a des objets mobiles qui se d´eplacent d’une fa¸con libre et arbitraire rendant ainsi la topologie du r´eseau fr´equemment chan-geante ;
— La moindre consommation d’´energie pour que le r´eseau survive le plus longtemps possible.
— Adaptation aux diff´erents environnements (fortes chaleurs, eau, etc) ;
— Autonomie et r´esistance vu que les nœud-capteurs sont souvent d´eploy´es dans des zones hostiles.
2.5 Domaines d’applications des r ´eseaux de capteurs sans fil
Les RCSFs peuvent ˆetre employ´es dans plusieurs domaines, tels que le domaine mili-taire, scientifique, industriel, m´edical et climatique qui seront d´etaill´es dans cette section.
2.5.1 Applications militaires
La technologie des RCSFs a ´et´e largement exploit´ee par le militaire. Ce dernier consti-tue le moteur initial pour le d´eveloppement de nouvelles technologie. Dans une zone stra-t´egique ou difficile d’acc`es, l’emploi de ce type de r´eseau peut assurer la collecte des donn´ees sur l’activit´e de l’ennemi, analyser des terrains avant d’envoyer des troupes en ce qui concerne les agents chimiques ou encore de radiations. On retrouve comme exemple d’application, un projet militaire de d´etection d’intrusion qui a ´et´e mont´e par UC-Berkeley (Pister, 2001) (voir la Figure 2.6). Les ´etapes de ce projet ´etaient les suivantes :
Figure 2.6 – Exemple d’une application militaire : d´etection et trac´e du chemin d’un v´ehicule militaire.
— Le d´eploiement (al´eatoire) des nœud-capteurs s’effectue `a l’aide d’un drone UAV (Unmanned Air Vehicle)
— La phase de fonctionnement du r´eseau a ´et´e ´etablie, chaque nœud-capteur peut envoyer ses donn´ees collect´ees vers la station de base `a travers un r´eseau de com-munication ;
— La d´etection d’intrusion (un v´ehicule militaire) passant par le r´eseau de capteur ; — Les donn´ees collect´ees sur ce v´ehicule militaire sont envoy´ees vers le drone (UAV) ; — Les donn´ees du chemin sont par la suite transf´er´ees du drone vers la station de
base.
2.5.2 Applications de suivi d’ ´ecosyst `emes et de surveillance environnementale
Pour avoir une surveillance de qualit´e sur les changements environnementaux, les nœud-capteurs servent `a d´eterminer les valeurs de certains param`etres sur une zone d’in-t´erˆet. En dispersant des nœud-capteurs dans les zones environnementales, on peut d´etecter des ´ev´enements tel que la d´etection des feux de forˆets, des tempˆetes ou des inondations et aussi la surveillance d’´ecosyst`eme et d’activit´e des volcans. Ceci permet une intervention beaucoup plus rapide et efficace des secours.
´Ecosyst `eme
L’´ecosyst`eme du fleuve Columbia CORIE (The Columbia River Ecosystem) est un exemple d’un syst`eme d’observation de l’environnement et de pr´evision. Il se compose de stations de d´etection dans l’estuaire du fleuve Columbia qui transportent divers capteurs environnementaux pour mesurer la vitesse de l’eau, la temp´erature de l’eau, la salinit´e et la profondeur.
En outre, plusieurs stations m´et´eorologiques sont d´eploy´ees pour mesurer et contrˆoler la qualit´e de l’air, et de d´eterminer le rayonnement solaire `a diff´erentes longueurs d’onde. Les informations recueillies `a partir de ces capteurs sont utilis´ees pour le contrˆole en ligne des navires, la recherche et le sauvetage maritimes.
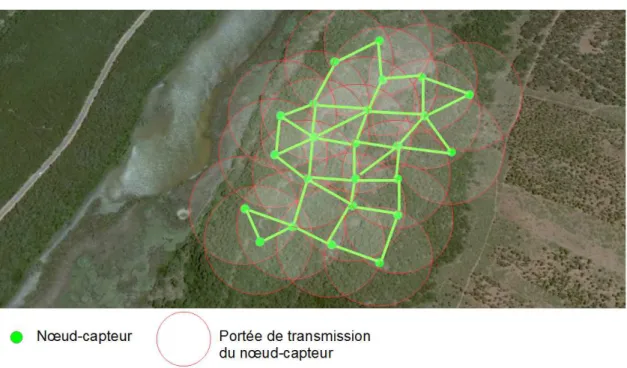
Figure 2.7 – Architecture du r´eseau de capteurs sans fil pour une application de sur-veillance de volcan.
Volcan
L’utilisation des r´eseaux de capteurs sans fil dans les environnements extrˆemes reste la seule alternative, o`u l’acc`es `a ces zones est impossible. Le suivi d’activit´e de Volcan est un exemple de ces applications extrˆemes, o`u un RCSF peut ˆetre facilement d´eploy´e pr`es des volcans actifs afin de surveiller en permanence leurs activit´es. La surveillance des volcans en ´Equateur constitue une preuve de concept de demandes de RCSF dans la surveillance des volcans. Les auteurs dans (Werner-Allen et al., 2006) d´ecrivent leurs efforts de mise en œuvre d’un r´eseau de capteurs sur le volcan Reventator dans la partie occidentale de l’Amazone en ´Equateur (voir la Figure 2.7).
D ´etection des incendies de forˆet
Les r´eseaux de capteurs sans fil sont ´egalement utilis´es dans les applications de d´e-tection des incendies de forˆet, qui utilisent g´en´eralement la technique de d´eploiement al´eatoire. Les nœud-capteurs peuvent relier l’origine exacte de l’incendie aux utilisateurs finaux avant que le feu se propage et devienne incontrˆolable. Dans ce type d’application de RCSF, les nœud-capteurs sont d´eploy´es d’une fa¸con dense sur une zone d’int´erˆet pour aider `a la surveillance et `a la pr´evention des feux. Ce r´eseau peut avoir deux tˆache dif-f´erentes, la premi`eres consiste `a envoyer p´eriodiquement l’´etat de la zone de surveillance (temp´erature, humidit´e, etc.) afin de permettre la pr´evention. La deuxi`eme tˆaches consiste `a envoyer une alarme en cas de d´etection de feu. Cette tˆache repr´esente un cas tr`es critique `a raison qu’il faut que le message d’alerte arrive `a la station de base en un temps bien r´eduit.
2.5.3 Autres applications
Parmi les champs d’utilisation des r´eseaux de capteurs sans fil qui touchent d’autres applications et pr´esentent une efficacit´e op´erationnelle, on trouve les :
Un r´eseau de capteurs peut ˆetre ´egalement utilis´e afin d’assurer `a distance la sur-veillance d’un patient, d’impl´ementer les nœud-capteurs dans le corps humain, et par la suite suivre l’avancement de leur ´etat dans un hˆopital, ou encore de r´ealiser une analyse biom´edicale qui a pour objectif d’aider les m´edecins `a la d´ecision.
Applications domotiques
Un r´eseau de capteurs peut ˆetre appliqu´e aux locaux d’habitation, dans les domaines de la gestion d’´energie, de la s´ecurit´e, des tˆaches m´enag`eres et des loisirs. Nous retrou-vons aussi ce type d’application dans les grandes structures, comme les hˆopitaux et les immeubles administratifs, pour contrˆoler les vibrations susceptibles.
Agriculture de pr ´ecision
Un des domaines d’application prometteurs des RCSFs est l’agriculture, o`u la tech-nologie des RCSFs peut offrir un support important qui permettra la gestion pr´ecise des ressources (l’eau, les engrais, etc.), le suivi des d´eveloppements des maladies, la pr´ediction du moment ad´equat de la r´ecolte, etc. L’avantage principal r´eside sur l’absence de cˆablage ce qui r´eduit consid´erablement le coˆut d’installation. Un autre avantage est la flexibilit´e de d´eploiement et la facilit´e d’entretien. En effet, les capteurs sont autonomes et n´ecessitent tr`es peu d’intervention humaine sur les champs, notamment dans le cas o`u les protocoles de communication sont tol´erants aux panne et supportent la mobilit´e des nœud-capteurs. Bien que les RCSFs connaissent un d´eveloppement continu `a travers l’int´egration d’In-ternet et des modules multim´edias, ils sont la plupart du temps moins mis en pratique. Les nombreux projets existants sont restreints aux applications militaires et scientifiques. Ces projets ont le plus souvent attrait `a l’observation de zones inaccessibles ou `a la sur-veillance d’environnements sensibles, `a cause de diff´erents facteurs et contraintes impos´ees lors de la conception des RCSFs.
2.6 Conclusion
Dans ce chapitre, nous avons d´ecrit ce qu’un r´eseau de capteurs sans fil et ses carac-t´eristiques. Nous avons pos´e les briques de base et f´ed´er´e quelques concepts n´ecessaires qui doivent ˆetre pris en compte dans la conception des r´eseaux de capteurs. Nous avons aussi mis l’accent sur la couverture et la connectivit´e d’un r´eseau de capteurs qui sont deux contraintes essentielles que nous d´evelopperons dans la suite de ce manuscrit.
3
M
OD`
ELE DE COUVER TURE ET DE CONNECTIVIT´
E DESRCSF
SSommaire
3.1 Introduction . . . 21
3.2 Pr´eliminaires . . . 22
3.2.1 Port´ee de d´etection . . . 22
3.2.2 Port´ee de transmission . . . 22
3.2.3 Collaboration des nœud-capteurs . . . 22
3.2.4 Zone de chevauchement des nœud-capteurs . . . 22
3.2.5 Nœud-capteurs voisins . . . 23
3.2.6 Degr´e d’un nœud-capteur . . . 23
3.3 Topologie du r´eseau . . . 24
3.3.1 Mod`ele de d´etection . . . 24
3.3.2 Mod`ele de communication . . . 25
3.4 Couverture du r´eseau . . . 26
3.4.1 Qualit´e de couverture du r´eseau . . . 26
3.4.2 Degr´e de couverture du r´eseau . . . 27
3.5 Connectivit´e du r´eseau . . . 28
3.5.1 Qualit´e de connectivit´e du r´eseau . . . 28
3.5.2 Degr´e de connectivit´e du r´eseau . . . 28
3.6 Conclusion . . . 29
3.1 Introduction
Dans ce chapitre, nous allons introduire et ´etudier les concepts fondamentaux des mod`eles de couverture du r´eseau et des mod`eles de communication. Nous ´etablirons les principales propri´et´es qu’on va utiliser par la suite pour la conception du mod`ele de d´e-tection d’intrusion. Nous fournissons ´egalement des configurations de base pour r´epondre aux exigences de l’application de d´etection d’intrusion de RCSFs.
Les notations suivantes sont utilis´ees tout au long de ce manuscrit. Elles concernent les ensembles, les variables et les constantes.
3.2.1 Port ´ee de d ´etection
La port´ee de d´etection d’un nœud-capteur est g´en´eralement consid´er´ee comme une importante caract´eristique, qui sp´ecifie le type du nœud-capteur choisi et l’application de RCSF. La port´ee de d´etection du nœud-capteur Ni de cordonn´ee ξi est repr´esent´ee par
un disque de rayon RSEN S et de centre ξi, d´efini par :
DiskNi(RSEN S) = {ξj ∈ R
2 : |ξ
i− ξj| ≤ RSEN S} . (3.1)
|ξi− ξj| repr´esente la distance Euclidienne entre les deux points ξi et ξj.
3.2.2 Port ´ee de transmission
La port´ee de transmission d’un nœud-capteur est contrˆol´ee par la capacit´e du rayon-nement des antennes utilis´ees et la puissance du signal mises en jeu. La port´ee de transmis-sion du nœud-capteur Ni de cordonn´ee ξi est repr´esent´ee par un disque de rayon RT RAN S
et de centre ξi, d´efini par :
DiskNi(RT RAN S) = {ξj ∈ R
2 : |ξ
i− ξj| ≤ RT RAN S} . (3.2) 3.2.3 Collaboration des nœud-capteurs
Soient Ni et Nj deux nœud-capteurs situ´es `a ξi et ξj respectivement, et soit dij la
distance Euclidienne entre Ni et Nj. En termes de couverture, on dit que Ni et Nj sont
en collaboration si, et seulement si :
dij = |ξi− ξj| ≤ 2RSEN S . (3.3)
Autrement dit, l’intersection de la surface SN i couverte par Ni et la surface SN j couverte
par Nj v´erifie la condition suivante :
SN i∩ SN j 6= ∅ . (3.4)
En g´en´eral, l’ensemble des nœud-capteurs qui sont en collaboration avec le nœud-capteur Ni forment la surface Scol(Ni), repr´esent´ee par :
Scol(Ni) =
[
{Nj:|ξi−ξj|≤2RSEN S}
SN j . (3.5)
3.2.4 Zone de chevauchement des nœud-capteurs
La zone de chevauchement (Overlapped area) des nœud-capteurs Ni et Nj, not´ee
Sol(Ni, Nj), est d´efinie par l’intersection entre la surface SN i et la surface SN j couverte
par Ni et Nj respectivement. Sol(Ni, Nj) est d´efini par :
Sol(Ni, Nj) = SN i∩ SN j . (3.6)
La zone de chevauchement d’un ensemble des nœud-capteurs de taille k, est exprim´ee par : Sol(N1, ..., Nk) = k \ i=1 SN i . (3.7)