Université du Québec
INRS : Eau, Terre et Environnement
Validation quantitative des cartes de glace de rivière
RADARSAT-1
Par Hugo Drouin
Mémoire présenté pour l’obtention
du grade de Maître ès Science (M.Sc.) en Sciences de l’eau
Jury d’évaluation
Examinateur externe Joost J. van der Sanden Ressources Naturelles Canada Secteur des sciences de la Terre Centre canadien de télédétection
Examinateur interne Karem Chokmani
INRS : Centre Eau, Terre et Environnement
Directrice de recherche Monique Bernier
INRS : Centre Eau, Terre et Environnement
RÉSUMÉ
Dans le cadre du projet FRAZIL dont le but ultime est la gestion et la prévision des embâcles causés par les glaces de rivière, les données de télédétection radar sont utilisées pour produire la cartographie des glaces de rivière. Des études récentes ont d’ailleurs permis de confirmer l’intérêt d’utiliser des images RADARSAT-1 pour la classification du couvert de glace. Cette cartographie permet d’identifier les différents types de glaces dominants qui recouvrent les rivières et de suivre l’évolution de ce couvert. Toutefois, dans un tel processus, des erreurs de classification surviennent en raison des caractéristiques complexes de la nature même de la glace et des spécificités du capteur (fréquence, niveau de bruit, résolution spatiale). Dans le but de connaître la précision des classifications de la glace de rivière à partir d’images RADARSAT-1, ce mémoire fournit une validation quantitative de la cartographie du couvert de glace. Trois approches de classification et trois variantes ont été testées sur quatre images satellites de la rivière Saint-François (Qc) et de la rivière Peace (Ab). Une méthode non-supervisée utilisant la rétrodiffusion (Weber et al., 2003), une méthode non-supervisée utilisant la texture et la rétrodiffusion (Gauthier et al., 2006), une approche orientée-objets (El Battay, 2006), une méthode non-supervisée utilisant la texture et la rétrodiffusion à 16 classes, une méthode utilisant l’algorithme Narendra-Goldberg et une approche par segmentation furent vérifiées. Sur les deux sites d’étude, la vérité-terrain fut acquise selon deux méthodes différentes, soit par survol aérien (rivière Peace) ou par reconnaissance au sol (rivière Saint-François). La matrice de confusion a été utilisée pour évaluer la concordance entre les différentes classifications du couvert de glace et la vérité-terrain. Pour la rivière Saint-François, une précision globale de classification variant entre 69 % et 99 % a été obtenue tandis que pour la rivière Peace, des résultats entre 57 % et 75 % ont été produits. Cette différence s’explique par la nature de la glace qui diffère et par la technique de production de la vérité-terrain. Dans presque tous les cas, la méthode orientée-objets a produit les meilleurs résultats. La glace fortement consolidée et l’eau libre ont été les classes le plus aisément discriminables par la majorité des méthodes. En revanche, les catégories de glace moyennement ou faiblement consolidées portent à confusion.
REMERCIEMENTS
Tout d’abord, j’aimerais grandement remercier ma directrice de recherche, la professeure Monique Bernier d’avoir eu confiance en moi en me permettant de travailler sur ce projet de recherche. Je la remercie profondément pour ces conseils très utiles et pour l’encadrement qu’elle m’a fourni tout au cours de ma maîtrise. De plus, j’apprécie grandement l’opportunité qu’elle m’a donnée d’aller présenter mes travaux ou les travaux de l’équipe en conférence, de participer aux écoles d’été GEOIDE et de contribuer à des expériences de terrains très enrichissantes.
J’aimerais également remercier Yves Gauthier, agent de recherche en télédétection, pour avoir été d’une immense aide durant mon séjour à l’INRS-ETE. Par ses conseils judicieux, ses idées, ses recommandations, son soutien technique, il m’a permis de faire progresser mon travail et de pouvoir accomplir les exigences de projet de recherche. Autant en laboratoire que sur le terrain, tu as été un collègue, un mentor, un ami sur qui je pouvais compter en tout temps malgré ton horaire très chargé.
De plus, un immense merci à tous les autres membres de l’équipe de recherche pour leur support et leur patience à répondre à mes interrogations. Une mention spéciale à Lisa-Marie Paquet, assistante de recherche en géomatique, pour ses conseils techniques, mais également pour les moments passés à rire, à délirer et de m’avoir permis de décrocher dans les moments opportuns. Merci aussi à Karem Chokmani, alors associé de recherche, sur qui toute l’équipe peut toujours compter lorsque nous avons une quelconque interrogation. J’aimerais aussi remercier les autres étudiants et stagiaires du laboratoire de télédétection pour leurs discussions amicales et toujours enrichissantes.
Merci à mes parents et ma famille qui m’ont soutenu et encouragé tout au cours de ma maîtrise et de mes études universitaires. Sans vous, cela aurait été très difficile et je ne serais pas où je suis présentement. Merci aussi de m’avoir donné le goût pour les études scientifiques, la géographie, la détermination et le respect. Je vous dois une fière chandelle pour votre présence lors des moments tant joyeux que plus difficiles.
Un immense merci à tous mes amis de l’INRS-ETE et collègues de bureau et de classe. Merci Isabelle, Brigitte, Nicolas, Kim, Simon, et tous les autres que je ne peux nommer. Les moments de détente, les soirées et les activités passés en votre compagnie furent toujours très plaisants et très énergisants pour continuer à progresser dans mes études.
De plus, j’aimerais souligner le soutien de quelques uns de mes amis depuis de nombreuses années. Guillaume, J-Fred, Jim et nombreux autres, votre présence est grandement appréciée et je sais que je peux compter sur vous à n’importe quel moment. Les nombreuses soirées, activités et sports avec vous sont marqués dans ma mémoire et le seront pour toujours.
Finalement, j’aimerais remercier le professeur Karem Chokmani et le Dr. Joost J. van der Sanden, chercheur au Centre canadien de télédétection, d’avoir accepté d’être réviseurs de mon mémoire. De plus, un merci spécial à l’équipe de BC Hydro pour leur collaboration précieuse.
TABLE DES MATIÈRES
RÉSUMÉ ... iii
REMERCIEMENTS... v
Table des matières... vii
Liste des figures et tableaux... ix
1. Introduction et objectifs ... 1
1.1 Mise en contexte... 1
1.2 Problématique... 2
1.3 Objectifs de recherche et hypothèse... 3
1.4 Plan du document ... 4
2. Cartographie des glaces de rivière par télédétection... 5
2.1 Formation de la glace de rivière ... 5
2.1.1 Glace columnaire ... 6
2.1.2 Glace de neige... 7
2.1.3 Glace de frasil ... 8
2.1.4 Arrangements physiques des glaces... 9
2.2 La télédétection radar ... 10
2.2.1 Le radar ... 11
2.2.2 Longueur d’onde, fréquence et polarisation ... 11
2.2.3 Résolution & angle d’incidence... 13
2.2.4 Le satellite RADARSAT-1 ... 14
2.2.5 Interaction du signal avec la surface... 16
2.2.6 La texture ... 17
2.3 Classification des glaces de rivière ... 19
2.3.1 Classification non-supervisée à l’aide de la rétrodiffusion (NSR) ... 20
2.3.2 Classification non-supervisée à l’aide de la texture et de la rétrodiffusion (NSTR)... 22
2.3.3 Classification orientée-objets (OO) ... 24
3. Méthodologie ... 29
3.1 Sites d’étude ... 29
3.2 Images utilisées ... 31
3.3 Procédure pour établir la vérité-terrain ... 33
3.3.1 Survol aérien (Rivière Peace) ... 34
3.3.2 Reconnaissance au sol (Rivière Saint-François)... 37
3.4 Classification du couvert de glace... 40
3.4.1 Classification non-supervisée à l’aide la rétrodiffusion (NSR) ... 41
3.4.2 Classification non-supervisée à l’aide de la texture et de la rétrodiffusion (NSTR)... 41
3.4.3 Classification orientée-objets (OO) ... 41
3.4.4 Autres méthodes de classifications ... 44
3.5 Validation des classifications ... 48
4. Résultats ... 53
4.1 Matrices de confusion et analyse des résultats ... 53
4.1.1 Rivière Saint-François, 26 janvier 2006 ... 56
4.1.2 Rivière Saint-François, 12 février 2006... 58
4.1.3 Rivière Saint-François, 7 février 2007... 61
4.1.4 Rivière Peace, 16 mars 2006... 65
4.1.5 Précision globale des méthodes de classifications... 69
4.2 Discussion ... 71
5. Conclusion ... 75
5.1 Perspectives de recherche... 77
Liste des références... 79
Annexe A - Cartes de la vérité-terrain pour les quatre images à l’étude ... 85
Annexe B - Exemples des résultats cartographiques des glaces de rivière selon les 6 méthodes à l’étude... 95
LISTE DES FIGURES ET TABLEAUX
Figure 1 : Glace columnaire, Rivière Saint-François, QC, 12 février 2006... 6
Figure 2 : Carotte de glace, le carré rouge (extrémité supérieure droite) représente la glace de neige, Rivière Saint-François, QC (Source : Gherboudj et al., 2007) ... 7
Figure 3 : Radeaux de frasil à la dérive, Rivière Saint-François, Qc ... 9
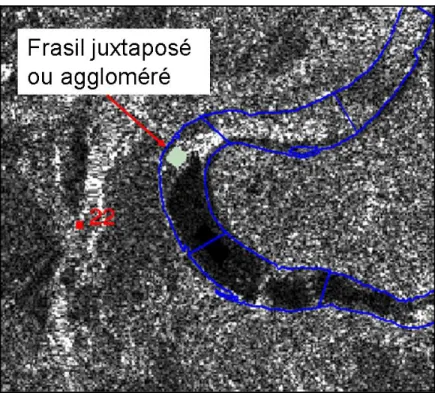
Figure 4 : Exemples d'arrangements physiques des glaces (A : frasil juxtaposé; B : frasil aggloméré; C : amas de glaces consolidées)... 10
Figure 5 : Spectre électromagnétique (gauche) et bandes radars (droite) ... 12
Figure 6 : Composition d'une onde électromagnétique ... 13
Figure 7 : Angles d'incidence et brillance du pixel (Source : CCT, 2003)... 14
Figure 8 : Faisceaux pour les différents modes d'imageries de RADARSAT-1 ... 15
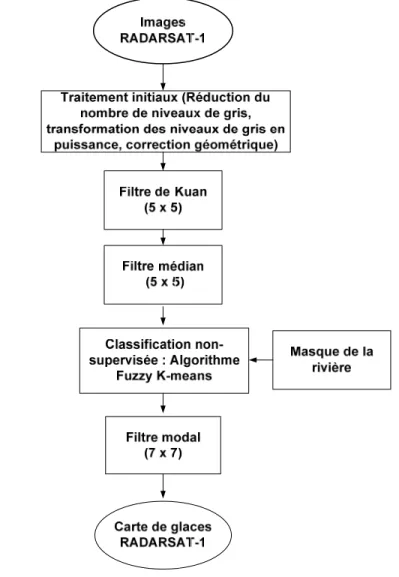
Figure 9 : Schéma des différentes étapes de classification de la méthode NSR ... 21
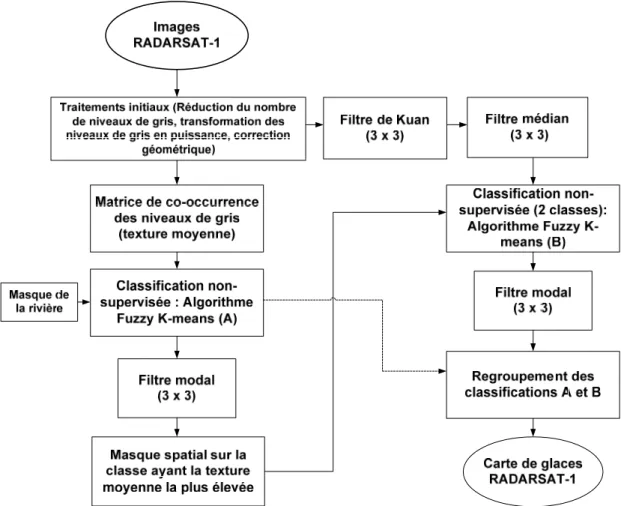
Figure 10 : Schéma des différentes étapes de classification de la méthode NSTR... 24
Figure 11 : Schéma des différentes étapes de classification OO (Source : El Battay, 2006) ... 27
Figure 12 : Organigramme des différentes règles de la classification orientée-objet (Source : Tirée d’El Battay, 2006, p.205)... 28
Figure 13 : Localisation de la rivière Saint-François, Québec ... 30
Figure 14 : Localisation de la rivière Peace, Alberta ... 31
Figure 15 : Modèle de pré-traitement des images satellitaires conçu avec l’utilitaire Modeler dans Geomatica V.10 (PCI Geomatics) ... 32
Figure 16 : Photo aérienne orthorectifiée du couvert de glace, Km 390,... 34
Figure 17 : Carte de vérité-terrain du couvert de glace, Km 390, Peace River, 16 mars 2006... 36
Figure 18 : Carte et croquis du couvert de glace lors de la visite sur le terrain, Km 87, Rivière Saint-François, 7 février 2007... 38
Figure 19 : Photo prise de la rive, Km 87, Rivière Saint-François, 7 février 2007... 38
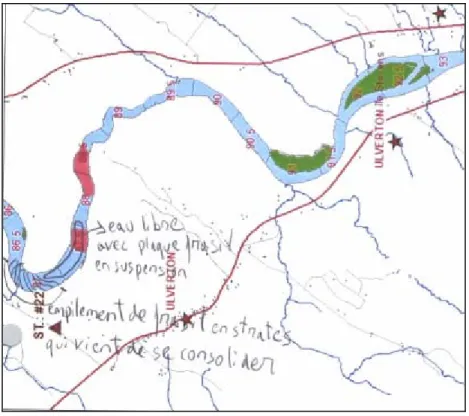
Figure 20 : Exemple de vérité-terrain au site géoréférencé # 22 sur la rivière Saint-François, 7 février 2007 ... 39
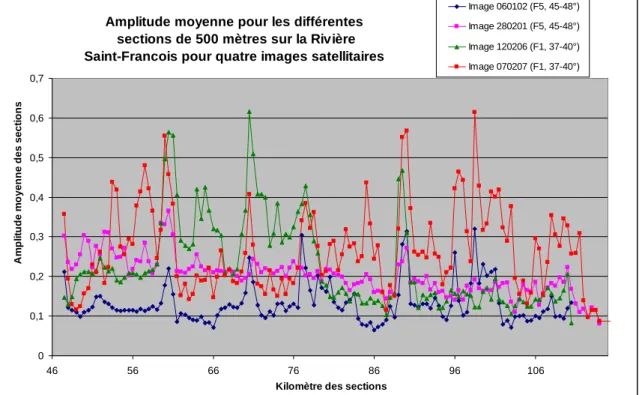
Figure 21 : Amplitude moyenne pour quatre images de la Rivière Saint-François
pour le secteur à l’étude ... 43
Figure 22 : Schéma des différentes étapes de classification de la méthode NSTR16.... 45
Figure 23 : Schéma des différentes étapes de classification de la méthode NSNG ... 46
Figure 24 : Schéma des différentes étapes de classification de la méthode SSG... 47
Figure 25 : Exemple d’une matrice de confusion (Image tirée de Short, 2007) ... 50
Figure 26 : Schéma récapitulatif de la méthodologie pour obtenir une validation quantitative... 51
Figure 27 : Pourcentage global de précision pour les six méthodes... 70
Tableau 1 : Caractéristiques des modes d'imageries de RADARSAT-1 ... 16
Tableau 2 : Images acquises en 2006 & 2007... 33
Tableau 3 : Seuils d'amplitudes modifiés pour les catégories de classification de l'OO ... 44
Tableau 4 : Degré d'accord et coefficient de Kappa (Source : Landis et Koch, 1977)... 49
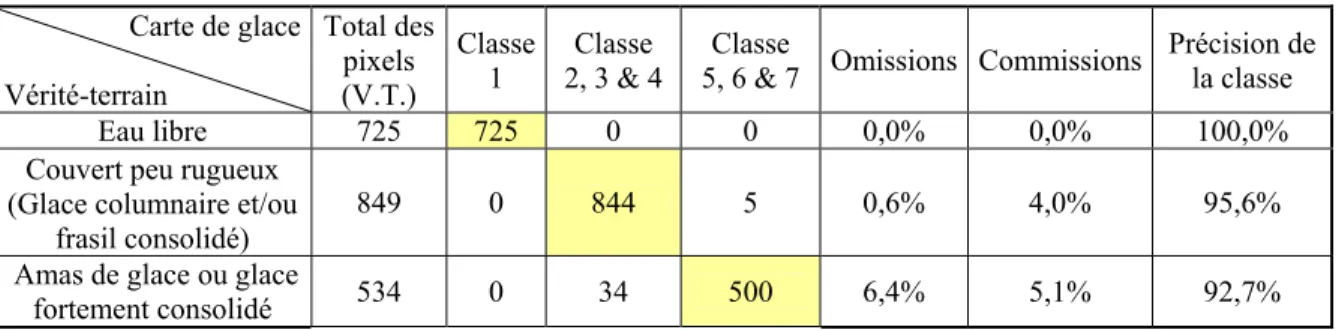
Tableau 5 : Exemple de regroupement de matrice... 55
Tableau 6 : Matrice de confusion pour la méthode non-supervisée rétrodiffusion (NSR), ... 56
Tableau 7 : Matrice de confusion pour la méthode non-supervisée texture et rétrodiffusion (NSTR), Rivière Saint-François, 26 janvier 2006 ... 56
Tableau 8 : Matrice de confusion pour la méthode orientée-objets (OO), ... 57
Tableau 9 : Matrice de confusion pour la méthode non-supervisée texture et rétrodiffusion à 16 classes (NSTR16), Rivière Saint-François, 26 janvier 2006... 57
Tableau 10 : Matrice de confusion pour la méthode non-supervisée Narendra-Goldberg (NSNG), Rivière Saint-François, 26 janvier 2006... 57
Tableau 11 : Matrice de confusion pour la méthode par segmentation à l’aide de SARSEG (SSG), Rivière Saint-François, 26 janvier 2006 ... 58
Tableau 12 : Matrice de confusion pour la méthode non-supervisée rétrodiffusion (NSR), ... 59
Tableau 13: Matrice de confusion pour la méthode non-supervisée texture et rétrodiffusion (NSTR), Rivière Saint-François, 12 février 2006... 60 Tableau 14 : Matrice de confusion pour la méthode orientée-objets (OO), ... 60 Tableau 15 : Matrice de confusion pour la méthode non-supervisée texture et
rétrodiffusion à 16 classes (NSTR16), Rivière Saint-François, 12 février 2006... 60 Tableau 16 : Matrice de confusion pour la méthode non-supervisée
Narendra-Goldberg (NSNG), Rivière Saint-François, 12 février 2006 ... 61 Tableau 17 : Matrice de confusion pour la méthode par segmentation à l’aide de
SARSEG (SSG), Rivière Saint-François, 12 février 2006 ... 61 Tableau 18 : Matrice de confusion pour la méthode non-supervisée rétrodiffusion
(NSR), ... 62 Tableau 19 : Matrice de confusion pour la méthode non-supervisée texture et
rétrodiffusion (NSTR), Rivière Saint-François, 7 février 2007... 63 Tableau 20 : Matrice de confusion pour la méthode orientée-objets (OO), ... 63 Tableau 21 : Matrice de confusion pour la méthode non-supervisée texture et
rétrodiffusion à 16 classes (NSTR16), Rivière Saint-François, 7 février 2007... 64 Tableau 22 : Matrice de confusion pour la méthode non-supervisée
Narendra-Goldberg (NSNG), Rivière Saint-François, 7 février 2007 ... 64 Tableau 23 : Matrice de confusion pour la méthode par segmentation à l’aide de
SARSEG (SSG), Rivière Saint-François, 7 février 2007 ... 65 Tableau 24 : Matrice de confusion pour la méthode non-supervisée rétrodiffusion
(NSR), ... 66 Tableau 25 : Matrice de confusion pour la méthode non-supervisée texture et
rétrodiffusion (NSTR), Rivière Peace, 16 mars 2006... 67 Tableau 26 : Matrice de confusion pour la méthode orientée-objets (OO), Rivière
Peace, 16 mars 2006 ... 67 Tableau 27 : Matrice de confusion pour la méthode non-supervisée texture et
Tableau 28 : Matrice de confusion** pour la méthode non-supervisée Narendra-Goldberg (NSNG), Rivière Peace, 16 mars 2006 ... 68 Tableau 29 : Matrice de confusion pour la méthode par segmentation à l’aide de
SARSEG (SSG), Rivière Peace, 16 mars 2006 ... 69 Tableau 30 : Précision globale et statistique de kappa pour chacune des méthodes de
classification pour les rivières à l’étude et pour les dates d’acquisition d’images... 70
1. Introduction et objectifs
1.1 Mise en contexte
La gestion hydrologique en période hivernale s’avère d’une grande importance pour les pays nordiques. Il est donc primordial de comprendre en profondeur les mécanismes de formation et d’évolution des glaces qui couvrent les rivières, les lacs et les océans durant ces périodes de froids intenses. Depuis quelques décennies, les études sur les glaces de rivières sont de plus en plus nombreuses, ce qui contribue fortement à l’avancement de la compréhension sur le sujet (Morse et Hicks, 2005). Un des principaux thèmes qui revient dans la plupart de ces études est l’impact que peuvent avoir les glaces de rivières sur l’environnement, tant naturel qu’humain. En effet, de nombreuses inondations au Canada ne sont pas seulement résultantes de précipitations torrentielles, mais elles sont aussi causées par les glaces de rivières. Les impacts de ces événements majeurs peuvent être catastrophiques et causer de dégâts très importants. Parmi eux, les infrastructures humaines telles les ponts, les barrages, les routes, les quais, les prises d’eau, etc. peuvent être détruites ou endommagées par la force des glaces de rivières lors d’embâcles et de débâcles. Sans oublier la navigation qui peut être perturbée, la production d’hydroélectricité qui peut être affectée et la sécurité des riverains qui peut être menacée (Ice Engineering, 1999).
D’autre part, en essor constant depuis les dernières décennies, la télédétection est une technologie qui ne cesse d’amener de nouvelles solutions aux sociétés actuelles. Ainsi, par son avancement, elle ne cesse d’accroître l’utilisation d’images satellitaires dans divers domaines. À l’instar de ce que nous venons de voir dans le paragraphe précédent, des outils se doivent d’être développés pour tenter de maîtriser les problèmes que peuvent causer les glaces de rivières. Un de ceux-ci est l’utilisation de la télédétection pour tenter d’obtenir de l’information sur les différents types de glaces qui forment le couvert. Plus précisément, l’utilisation d’imagerie radar, aéroportée ou satellitaire, permet depuis quelques années de fournir de l’information pertinente sur le sujet (Leconte et Klassen, 1991). Un des avantages notables de ces systèmes est sa propriété active, ce qui permet
au radar de prendre des images sous toutes conditions climatiques et à tout moment de la journée. Cet aspect est très utile pour le suivi des glaces de rivières car nous savons que le couvert de glace peut varier très rapidement.
1.2 Problématique
Le projet de recherche FRAZIL, dans lequel s’insère ce travail, vise le développement d’un système d’informations géographiques (SIG) dans le but d’améliorer la gestion et la modélisation hydrologique hivernale. Ainsi, à l’aide de ce système, la prévision des inondations reliées aux embâcles, l’optimisation de la gestion des infrastructures hydroélectriques et la navigation fluviale d’hiver pourront être améliorées. Pour accomplir ce vaste projet, plusieurs caractéristiques de la rivière ou de son environnement se devront d’être étudiées et intégrées au SIG. Parmi celles-ci se trouvent l’hydrologie de la rivière, sa morphologie, les conditions climatiques, les caractéristiques du couvert de glace et une évaluation du risque (dommages potentiels d’inondations causées par des embâcles). Le SIG permet entre autres de gérer, manipuler, analyser, saisir et interroger l’information géographique qui est présente sur ces différentes couches (topographie, réseau hydrique, réseau routier, climatologie, couvert de glace, etc.) et qui possède une référence spatiale (ESRI, 2007). À partir des résultats du SIG, les données spatiales pourront servir à étalonner et à valider les modèles climatiques, hydrologiques, de risques et de glaces pour estimer les conditions futures de la rivière (Gauthier et al., 2007).
Une étape jalon de ce projet est la caractérisation du couvert de glace à l’aide d’imagerie satellite radar. L’objectif principal est d’étudier l’interaction entre le signal radar en bande C et le couvert de glace sur une rivière. Tel que mentionné auparavant, plusieurs études se sont déjà penchées sur l’utilisation de l’imagerie radar pour la caractérisation du couvert de glace, ce qui a engendré des résultats très encourageants. Certains auteurs tels Jasek et Weber (2003), Tracy et Daly (2003), El Battay (2006) et Gauthier et al (2006) ont utilisé différentes méthodologies pour réaliser la classification des différents types de glaces de rivière. D’après ces analyses, les types de glaces produisant de fortes valeurs de rétrodiffusion sont plus facilement détectables que ceux ayant de faibles valeurs de
méthodologie de classification améliore la distinction des faibles valeurs de rétrodiffusion, sans toutefois réduire la discrimination des hautes valeurs de rétrodiffusion (Gauthier et al., 2006). D’autre part, selon El Battay (2006), la classification des glaces de rivières se doit d’ajouter des intrants autres que l’information tirée de l’image radar. Ainsi, le contexte dans lequel se trouvent les pixels de l’image est primordial et amène une valeur ajoutée à la classification.
Toutes ces études ont été validées par certaines campagnes de reconnaissance-terrain, ce qui a permis de fournir une validation visuelle / qualitative des classifications de glaces de rivière. Il a toutefois été impossible pour ces auteurs d’en mesurer le niveau d’exactitude. Ainsi, à l’aide de campagnes de terrain exhaustives et précises, nous prévoyons produire une validation quantitative de ces méthodologies. Néanmoins, les données de validation (vérité-terrain) constituées par photo-interprétation contiennent inévitablement des incertitudes. Malgré cet aspect, nous pourrons avoir une valeur de référence qui nous permettra de comparer les classifications et de pouvoir juger d’une manière objective les futurs ajustements nécessaires aux différentes méthodologies.
1.3 Objectifs de recherche et hypothèse
De façon globale, le but premier de ce travail est de fournir une validation quantitative des cartes de glaces de rivière RADARSAT-1. Plus précisément, nous pouvons diviser l’objectif principal de ce travail en quatre sous-objectifs spécifiques, soit :
1) Constituer une vérité-terrain représentant l’état du couvert de glace des rivières à l’étude au même moment où les images satellites sont acquises;
2) Procéder à la classification des images satellites à l’aide de méthodes sélectionnées ;
3) Estimer la précision de chacune des méthodes de classification à partir de la vérité-terrain;
4) Comparer les différentes méthodes de classification et mieux comprendre l’effet des types de glaces de rivière sur le signal radar.
Nous croyons qu’en développant une méthodologie de vérité-terrain basée sur la photo-interprétation des différents types de glaces de rivière, nous serons en mesure d’établir une référence quantitative de précision des classifications à partir d’images RADARSAT-1. Néanmoins, nous considérons aussi que les résultats obtenus seront représentatifs de la réalité, mais que certaines incertitudes seront présentes dans la classification et dans la vérité-terrain.
1.4 Plan du document
La présentation de ce mémoire de recherche est divisée en cinq chapitres. Premièrement, le chapitre 1 introduit la mise en contexte du sujet de recherche, la problématique et les objectifs du présent travail. Le chapitre 2 se penche sur la théorie reliée à la cartographie des glaces de rivière par télédétection. Au cours de ce chapitre, les différents types de glace de rivière, la théorie sur le radar et l’explication de différentes méthodes de classification sont présentés. Le chapitre 3 décrit les sites d’étude et explique la méthodologie prise pour réaliser les différents objectifs de recherche, telle que la procédure pour obtenir la vérité-terrain, les traitements effectués sur les images radar et le procédé pour évaluer la précision des classifications. Au cours du chapitre 4, les résultats des classifications, de la vérité-terrain et des validations quantitatives sont démontrés. De plus, une discussion de ces résultats est abordée. Pour terminer, le chapitre 5 sert de conclusion pour ce mémoire.
2. Cartographie des glaces de rivière par télédétection
Ce chapitre présente les principaux concepts théoriques liés à ce mémoire. Deux grands thèmes sont abordés, soit la glace de rivière et la télédétection radar. En premier lieu, une brève rétrospective du processus de formation de la glace de rivière, ses caractéristiques et les différents types de glace qui peuvent être retrouvés sur une rivière. Par la suite, certains principes de base reliés à la télédétection, les concepts du radar et l’interaction glace de rivière-signal radar sont expliqués. Pour terminer ce chapitre, le fonctionnement de trois méthodes de classification des glaces de rivière à partir d’images satellites est abordé.
2.1 Formation de la glace de rivière
La glace de rivière est une composante majeure de l’hydrologie des rivières nordiques. Par conséquent, de nombreux phénomènes doivent être pris en compte dans la compréhension de la formation de la glace de rivière. Premièrement, celle-ci est composée d’eau douce qui cristallise sous l’effet du processus de la nucléation hétérogène à des températures au-dessous de 0oC (Michel, 1978). À l’état pur, la glace possède une densité de 0,9166 g/cm³, ce qui diffère quelque peu d’une glace qu’on retrouve en rivière (El Battay, 2006). Cette différence peut provenir du fait que les processus de formation dépendent de l’hydraulique de la rivière, des conditions climatiques au cours de son évolution et des particules présentes dans l’eau. En effet, une rivière turbulente sera beaucoup plus favorable à produire du frasil tandis que pour une rivière calme, c’est généralement la glace columnaire qui sera formée. Une des principales caractéristiques qui va distinguer les différents types de glaces de rivière est la densité d’inclusions d’air (Gherboudj et al., 2007).
Dans les prochaines sous-sections, les trois principaux types de glace, soit la glace columnaire, la glace de neige et la glace de frasil, sont expliqués. De plus, un survol est fait sur les différents arrangements physiques que peuvent prendre les glaces de rivière.
2.1.1 Glace columnaire
Ce type de glace est considéré comme une glace primaire car elle se forme souvent en premier lieu. Dans la littérature, elle est aussi nommée glace de rive, glace standard ou glace thermique selon les différents auteurs. D’apparence claire, elle est assez solide pour supporter le poids d’une motoneige dès qu’elle atteint 10-15 cm d’épaisseur (Secrétariat du Conseil du Trésor Canadien, 1993). Cette glace se fixe souvent aux rives en premier, mais peut aussi se fixer aux roches, aux ponts et aux obstacles dans la rivière. Sa formation dépend de certains facteurs tels que la température externe de l’air, la vitesse du vent et l’écoulement de la rivière qui se doit d’être laminaire (Michel, 1978). À cet effet, si la température externe s’abaisse, cela provoque un refroidissement des masses d’eaux supérieures de la rivière jusqu’au point de congélation, ce qui engendre une cristallisation et ainsi un début de couvert de glace (Gherboudj, 2005).
La glace columnaire (
Figure 1) comporte peu d’inclusions d’air, en raison du lent processus de sa formation. Celles retrouvées dans ce type de glace sont de forme sphérique ou tubulaire, distribuées de façon homogène et peu abondantes (Gherboudj et al. 2007).
2.1.2 Glace de neige
La glace de neige (Figure 2) se forme de deux manières différentes. Premièrement, si les conditions de l’eau sont propices et près du point de congélation, une averse de neige, au contact entre l’eau et la neige (Ashton, 1986), peut provoquer la formation d’un couvert de glace (slush en premier lieu et couvert de glace par la suite). Par ailleurs, si le couvert de glace est déjà en place et qu’une certaine accumulation de neige est présente sur le dessus, il peut se former de la glace de neige. Pour cela, il doit y avoir une infiltration d’eau à travers le couvert de glace qui entre en contact avec la couche de neige ou une fluctuation du niveau d’eau de la rivière (couvert de glace et couche de neige sont inondés). La couche de neige est ainsi saturée en eau et se change en glace.
Ce type de glace contient beaucoup d’inclusions air, de formes sphériques (0,01 à 1cm), petites, rapprochées et distribuées de façon homogène (Gherboudj et al, 2007). La porosité de ce type de glace est aussi assez élevée.
Figure 2 : Carotte de glace, le carré rouge (extrémité supérieure droite) représente la glace de neige, Rivière Saint-François, QC (Source : Gherboudj et al., 2007)
2.1.3 Glace de frasil
Le frasil se forme toujours dans un milieu turbulent. Ce milieu est propice car la colonne d’eau de la rivière est mélangée sur toute sa profondeur en raison du brassage continu, ce qui empêche la stratification de la rivière (Beltaos, 1995). Pour produire du frasil, la température de l’air doit être inférieure à -8o C, la température de l’eau doit être sous le niveau critique (en surfusion) et des impuretés (sédiments, végétation, neige, éclaboussure d’eau, etc) doivent être introduites dans la rivière (Yapa et Shen, 1986). Cette combinaison de conditions produit, dans un milieu turbulent, des particules qui constituent les catalyseurs de la formation des cristaux de glaces (frasil). Par la suite, ces cristaux vont croître très rapidement et se joindront à d’autres particules jusqu'au moment où leur dimension est moins influencée par la turbulence ou, si l’écoulement de la rivière devient moins turbulent et que la température de l’eau se réchauffe (Michel, 1978). À partir de ce moment, les plaques de frasil remontent à la surface et forment des radeaux de frasil (Figure 3) visibles à l’œil nu. Finalement, les radeaux de frasil s’agglomèrent les uns aux autres pour constituer un couvert de glace.
En général, les inclusions d’air contenues à l’intérieur de la glace de frasil ont des formes irrégulières et sont distribuées de façon hétérogène, ce qui dépend fortement de la température au moment de la formation et de la morphologie de la rivière. Lorsque le niveau de refroidissement de la température se fait de façon peu rapide, les inclusions d’air sont plus petites, de formes sphériques et distribuées de façon hétérogène et rapprochée (Gherboudj et al, 2007). À l’inverse, lorsque le refroidissement est expéditif, les inclusions d’air sont plus importantes, de formes sphériques ou irrégulières et distribuées de façon rapprochée (Gherboudj et al, 2007).
Figure 3 : Radeaux de frasil à la dérive, Rivière Saint-François, Qc
2.1.4 Arrangements physiques des glaces
Précédemment, les caractéristiques des trois grandes classes de types de glaces de rivière ont été brièvement abordées. Il faut toutefois comprendre que la formation du couvert de glace est en évolution tout au long de la saison hivernale et que le régime d’écoulement et la température vont influer sur la mise en disposition de celui-ci. En effet, cela provoque des combinaisons de ces types de glace à un même endroit, mais aussi des arrangements physiques différents. Il est important de prendre en note que les glaces de frasil peuvent s’agglomérer (courant fort qui compressent les radeaux de frasil, Figure 4 B), ou se juxtaposer (les radeaux de frasil se collent doucement, Figure 4 A) sur le couvert en place (Ashton, 1986). De plus, une glace columnaire peut être brisée par une hausse ou une baisse du niveau de l’eau, ce qui va former des gros morceaux de glace qui vont dériver jusqu’à un obstacle ou une partie plus étroite de la rivière. À ce moment, le couvert de glace créé par cet amas de morceaux de glace accumulés peut être considéré comme un couvert de glace fortement consolidé (Figure 4 C).
A B C
Figure 4 : Exemples d'arrangements physiques des glaces (A : frasil juxtaposé; B : frasil aggloméré; C : amas de glaces consolidées)
Les différentes caractéristiques des glaces de rivière, les différents arrangements et les différentes combinaisons de types de glaces de rivière vont grandement influencer le retour du signal radar. De plus, la rugosité de la surface du couvert de glace est un aspect à considérer dans l’analyse des images satellitaires et des glaces de rivière (Leconte et Klassen, 1991). Il faut aussi signaler que l’interface glace-eau joue un rôle dans le retour du signal. Au cours de la section suivante, l’effet des différents couverts de glace sur le signal sera abordé plus en profondeur.
2.2 La télédétection radar
La terre peut être visualisée et analysée de nombreuses manières par différents outils. Un de ceux-ci est l’exploitation d’images qui représentent les phénomènes sur terre. Qu’elle soit aéroportée ou satellitaire, lorsque qu’une image est prise à distance d’un objet, d’un endroit ou d’un quelconque phénomène, cette technique est nommée la télédétection. Dans ce mémoire, la télédétection figure parmi un des aspects majeurs du travail réalisé, il est donc primordial de présenter les concepts de base reliés à ce sujet.
La télédétection est une discipline en constante évolution et croissance, ce qui fait que le sujet est très vaste à couvrir. Ainsi, au cours de la prochaine section, seulement une présentation de la théorie sur l’imagerie radar sera présentée. Premièrement, une description générale des principales caractéristiques d’un capteur radar sera abordée
de rivière sur le signal. Les caractéristiques du satellite canadien RADARSAT-1 seront aussi décrites. Finalement, la notion de texture dans les images sera expliquée.
2.2.1 Le radar
En premier lieu, c’est l’interaction entre le signal incident et une cible qui est à la base d’une image satellitaire. En effet, le capteur mesure la quantité d’énergie transmise par celui-ci et rétrodiffusée par la cible. Lorsque le capteur produit sa propre énergie, il est considéré comme un capteur actif, tel le radar (CCT, 2003). À l’inverse, si le capteur se sert de l’énergie produite par une source externe, tel le soleil, il est nommé passif (CCT, 2003). Cette énergie est produite sous forme de rayonnement électromagnétique. Par conséquent, la télédétection utilise une grande partie du spectre électromagnétique (Figure 5). Les différentes longueurs d’ondes utilisées possèdent leurs propres avantages dans les applications de la télédétection. Par exemple, à l’inverse des images acquises dans le visible, les images radars (longueurs d’ondes plus longues que les particules de l’atmosphère) sont indépendantes des conditions météorologiques. Cette propriété, couplée au fait qu’il s’agit d’un capteur actif (produit son propre rayonnement), permet l’acquisition d’images à n’importe quel moment du jour et de la nuit, peu importe l’état des conditions atmosphériques. De cette façon, les images radars peuvent être utiles dans les situations d’urgences car l’acquisition de l’image est assurée et analysable (problèmes techniques exclus).
2.2.2 Longueur d’onde, fréquence et polarisation
L’onde d’un rayonnement électromagnétique est caractérisée par deux variables très importantes. La première est sa longueur d’onde, ce qui correspond à la distance entre deux crêtes d’ondes successives (Fischer, 1992). Deuxièmement, la fréquence de l’onde équivaut aux nombres d’oscillations par unité de temps (CCT, 2003). Ces deux variables sont inversement proportionnelles, ce qui signifie que plus la longueur d’onde est grande, plus la fréquence sera basse et vice versa (Fischer, 1992). La relation entre longueur d’onde et fréquence s’exprime comme suit :
Où :
C = vitesse de la lumière;
λ
= longueur d’onde et; V = fréquenceLa partie radar du spectre électromagnétique fait partie des longueurs d’ondes des hyperfréquences. Celles-ci sont divisées en plusieurs bandes de longueurs d’ondes différentes (Figure 5). Le rayonnement émis par le satellite RADARSAT-1 se trouvent dans la bande C (
λ
= 3,75 à 7,5 cm).Figure 5 : Spectre électromagnétique (gauche) et bandes radars (droite) (Source : C.C.T., 2003)
L’onde électromagnétique peut être représentée par trois vecteurs perpendiculaires : le champ électrique, le champ magnétique et la direction de propagation (Figure 6). La polarisation de l’onde électromagnétique est déterminée par la direction du champ
linéaire peut être verticale (V) ou horizontale (H), ce qui est déterminé par le parallélisme du champ électrique avec l’axe horizontal ou vertical. Le capteur radar peut fonctionner en mode HH (transmission et réception horizontale) ou VV (transmission et réception verticale). À l’inverse de ces derniers modes qui sont considérées comme parallèles, la polarisation peut aussi être en mode croisé, ce qui signifie des ondes HV ou VH (Henderson et Lewis, 1998)
Figure 6 : Composition d'une onde électromagnétique (Source : Lekhal et Ellefsen, 2002)
2.2.3 Résolution & angle d’incidence
La géométrie de l’acquisition de l’image radar est d’une grande importance pour l’analyse et le traitement de données satellitaires. Il faut premièrement tenir compte de la résolution de l’image qui est la plus petite mesure de séparation entre deux objets (CCT, 2003). Pour cela, les objectifs de l’analyse et les caractéristiques de la cible à étudier doivent être connus si nous voulons optimiser l’information extraite de l’image. Par exemple, si on veut cartographier les types de forêts de la région du Saguenay - Lac Saint-Jean (>100 000 km2), l’utilisation d’images de haute résolution (plus petit que 10m) peut s’avérer dispendieuse et superflue. À l’inverse, si nous voulons analyser une zone urbaine, il est plus pertinent d’utiliser des images à très haute résolution (< 5m).
De plus, l’angle d’incidence va aussi jouer un rôle majeur dans le traitement d’une image satellite. Il représente l’angle entre le faisceau radar incident et l’axe perpendiculaire vertical de la cible (Figure 7). À cet effet, plus l’angle d’incidence va augmenter, pour le cas d’une image radar, plus le signal radar de retour sera faible. (Ulaby et al., 1986)
Figure 7 : Angles d'incidence et brillance du pixel (Source : CCT, 2003)
2.2.4 Le satellite RADARSAT-1
Le satellite canadien RADARSAT-1 est en orbite depuis novembre 1995. Il émet des hyperfréquences en bande C (longueur d’onde de 5,6 cm) avec une polarisation HH (Agence spatiale canadienne, 2006). RADARSAT-1 possède un radar à synthèse d’ouverture (RSO)1, ce qui permet d’obtenir des images à haute résolution. Ce capteur suit une orbite héliosynchrone survolant les deux pôles. Avec une fréquence de 14 orbites par jour, n’importe quelle partie du Canada peut être prise en image dans un délai de 3 jours (Agence spatiale canadienne, 2006). Les régions nordiques sont survolées avec une
1 Les images captées à l’aide de radars à antennes réelles produisent une résolution qui est proportionnelle à la distance antenne-cible. Il serait plutôt improbable de penser qu’un satellite puisse posséder un radar à
plus grande fréquence. Cette caractéristique est notamment intéressante dans le cas d’un suivi d’une catastrophe, tel un embâcle ou une inondation.
RADARSAT-1 dispose d’une grande panoplie de largeurs de faisceaux (Figure 8). Ces modes d’imageries (Tableau 1) peuvent produire des images de 8 à 100 mètres de résolution spatiale avec des angles d’incidences très flexibles, variant de 10o à 59 o (Agence spatiale canadienne, 2006). Pour cette étude, les images en mode haute résolution (8 m) ont été retenues. Ce mode d’images (F1 à F3) est mieux adapté au suivi de la glace de rivière en raison de l’étroitesse des rivières et il permet une meilleure distinction de l’hétérogénéité de la glace et de l’eau libre qui peuvent varier rapidement sur de petites étendues spatiales. De plus, les angles d’incidences en mode fin (37○-47○), produisent une meilleure discrimination de la nature de la glace (plus de diffusion de volume à 45○ qu’à 20○) (Leconte et Klassen, 1991). Toutefois, il faut généralement plusieurs images en mode fin pour couvrir l’ensemble d’une rivière, puisque que chaque image s’étend sur environ 45 x 45 km.
Figure 8 : Faisceaux pour les différents modes d'imageries de RADARSAT-1 (Source : Agence spatiale canadienne, 2006)
Tableau 1 : Caractéristiques des modes d'imageries de RADARSAT-1 (Source : Agence spatiale canadienne, 2006)
Modes d'imagerie Mode Résolution nominale (m) Nombre de positions / faisceaux Largeur de fauchée (km) Angles d'incidence (degrés) Haute résolution 8-9 15 45 37 – 47 Standard 30 7 100 20 – 49 Large 30 3 150 20 – 45 ScanSAR étroit 50 2 300 20 – 49 ScanSAR large 100 2 500 20 – 49 Faisceau étendu haute incidence 18 - 27 3 75 52 – 58 Faisceau étendu faible incidence 30 1 170 10 – 22
2.2.5 Interaction du signal avec la surface
En plus de la rugosité de surface, les propriétés diélectriques et l’angle d’incidence ont une influence sur la rétrodiffusion du signal radar (Peake et Olover, 1971).
La constante diélectrique aussi appelée permittivité relative (
ε
r) est une propriété électrique de la cible qui fait varier le retour du signal radar. Lorsque le contraste diélectrique entre deux milieux est grand, tel le cas de l’air (ε
r = 1) et de l’eau (ε
r = 80), le signal radar ne pénétrera pas dans le second milieu, ce qui se nomme diffusion de surface. À l’opposé, si le contraste diélectrique est petit, tel le cas de l’air (ε
r = 1) et de la glace (ε
r = 3), le signal pénétrera dans le second milieu et la rétrodiffusion sera influencée par les diffuseurs hétérogènes du second milieu et non seulement par la couche supérieure. Ce second phénomène se nomme diffusion de volume (Bernier et al., 1996).Dans le cas d’une rétrodiffusion de surface, la rugosité de surface de la cible affecte grandement le retour du signal. Ainsi, si l’interface glace-eau est très rugueuse, il y aura diffusion du signal dans toutes les directions et une partie significative retournera au capteur. Cette zone sera plus claire sur une image radar. À l’inverse, si l’interface glace-eau est très lisse, tel une glace lisse columnaire, la diffusion de surface se fera de façon spéculaire (dans la direction opposée au capteur) et une faible quantité retournera au capteur (CCT, 2003). Dans ce cas, cette partie de l’image sera beaucoup plus sombre.
Dans le contexte des glaces de rivières, selon Hall (1998), des facteurs tel l’épaisseur de la glace, les inclusions d’air et leurs formes, la couche de glace de neige et l’interface glace-eau/glace-fond vont influencer le signal rétrodiffusé. Selon une étude publiée par Hydro-Québec (1996), certaines caractéristiques de l’interaction entre les glaces de rivière et le signal radar furent notées. Premièrement, la glace lisse (ou glace columnaire) produit une réflexion spéculaire du signal, la glace mouillée absorbe le signal et la glace sans inclusions d’air ne produit aucune diffusion volumique. Ces trois caractéristiques vont influencer à la baisse le retour du signal. Au contraire, la rétrodiffusion est forte si la glace est épaisse ou bien agglomérée et quelle contient des inclusions d’air (diffusion de volume), ou si l’interface glace-eau est rugueuse provoquant de la réflexion diffuse. 2.2.6 La texture
L’intensité du signal rétrodiffusé nous fournit habituellement beaucoup d’informations sur une cible. Toutefois, nous pouvons tenter d’aller plus loin dans l’utilisation de l’information extraite de l’image. Une des façons de le faire se trouve dans l’utilisation de la texture.
Selon Hall-Beyer (2000), la texture dans une image quantifie la différence des niveaux de gris entre pixels, l’étendue spatiale sur laquelle se produit ces changements et la direction préférentielle (ou non) de ces changements. Elle est communément calculée statistiquement sur la base de la matrice de co-occurrence des niveaux de gris (GLCM), qui établit à quelle fréquence se produisent différentes combinaisons de niveaux de gris dans une image. Dans son utilisation la plus courante, la GLCM calcule des texture de
second ordre, c'est-à-dire qu’elle considère la relation entre des groupes de deux pixels dans l’image originale. La GLCM est une matrice carrée et symétrique qui est exprimée sous forme de probabilités. On dit ainsi qu’elle est normalisée. La plupart des mesures de texture sont des moyennes pondérées du contenu de la matrice normalisée.
Nous pouvons regrouper ces mesures de texture selon leur objectif. Par exemple, pour exprimer le niveau de contraste d’une image, on utilisera les mesures de contraste, d’homogénéité ou de dissimilitude. Pour exprimer le niveau d’arrangement dans une image on pourra utiliser les mesures d’entropie ou de second moment angulaire. Finalement, pour une description statistique, on pourra utiliser la moyenne, la variance ou la corrélation. À noter que la moyenne par exemple, n’exprime pas la moyenne des valeurs originales de l’image. Elle est exprimée en termes de GLCM, donc la valeur est pondérée par la fréquence d’occurrence du niveau de gris en combinaison avec un voisin d’un certain autre niveau de gris et se calcule selon :
(2)
Où :
Pi , j est la probabilité de cooccurrence à la cellule (i, j) de la matrice de cooccurrence
de niveau de gris symétrique;
μ
i = Équation de gauche est calculée en fonction du pixel de référence (i);μ
j = Équation de droite est calculée en fonction du pixel voisin (j);i = Valeur de niveau de gris du pixel de référence ; j = Valeur de niveau de gris du pixel voisin.
Nous devons mentionner que les deux équations ci-haut présentées sont égales car la GLCM est symétrique. En réalité, tel que mentionné précédemment, le pixel de référence et le pixel voisin forment le groupe de deux pixels qui sert pour calculer la texture de
second ordre dans une fenêtre de taille définie, ce qui signifie que les deux équations sont identiques.
2.3 Classification des glaces de rivière
Au début des années 1990, l’utilisation potentielle des données RSO aéroportées pour la cartographie des glaces de rivière fut démontrée par Leconte et Klassen (1991). Depuis 1995, l’arrivée du satellite RADARSAT-1 a permis de faire progresser cette application. Ainsi, Weber et al. (2003) ont proposé une approche non-supervisée simple qui a fournit des résultats prometteurs. Nous avons donc choisi cette méthode comme référence de base car elle est la première étude publiée sur la classification de glaces de rivière utilisant RADARSAT-1. Par la suite, Gauthier et al (2006) ont tenté d’améliorer cette méthodologie à l’aide de l’introduction de la texture moyenne dans la classification. Finalement, dans la foulée du développement d’un système SIG pour le projet FRAZIL, un autre type de classification fut développé toujours à partir d’images radar, mais basé sur un contexte de discrimination d’objets par rapport à leurs caractéristiques, leurs environnements immédiats et leur interaction avec leurs voisins. Celle-ci est l’approche orientée-objets.
D’autres travaux ont été réalisés sur l’utilisation de l’imagerie radar pour la cartographie des glaces de rivière. En effet, des auteurs tels Puestow et al. (2004), Pelletier et al. (2005) et Tracy et Daly (2003) ont travaillé sur le sujet. La majorité de ces études utilisent des photos aériennes et des données terrain pour valider qualitativement la classification du couvert de glace. D’ailleurs, les résultats cartographiques extraits à partir des images satellitaires permettent de distinguer des caractéristiques précises du couvert de glace telles des embâcles, de la glace lisse, de l’eau libre, etc. De façon générale, tous ces auteurs arrivent à une conclusion similaire. L’utilisation de l’imagerie RADARSAT-1 pour la classification des glaces de rivière est fonctionnelle, mais celle-ci se doit d’être approfondie et développée davantage afin de devenir complément efficace et fiable à 100%. Toutefois, ces méthodes de classifications utilisées sont uniquement basées sur l’intensité du signal et se comparent donc à notre méthode de référence (Weber et al,
2003). Nous avons donc jugé qu’il n’était pas nécessaire de procéder à la validation quantitative de ces méthodes.
Pour répondre aux objectifs de recherche de ce mémoire de maîtrise, trois méthodes de classification des glaces de rivière furent retenues. Tel que mentionné précédemment, l’efficacité de ces méthodes pour la caractérisation des couverts de glaces de rivière fut démontrée qualitativement, mais aucune validation quantitative à l’aide de données de terrain ne fut effectuée. Deux de ces méthodes sont non-supervisées, ce qui requiert peu de temps et procure un bon résultat indépendamment du niveau de connaissance de l’analyste qui traite l’image. Nous appellerons ces méthodes : non-supervisée à l’aide de la rétrodiffusion (NSR) et non-supervisée à l’aide de la texture et de la rétrodiffusion (NSTR). Finalement, la troisième méthode utilisée est une classification orientée-objets (OO), qui est automatisée, mais qui requiert l’intervention d’un spécialiste pour le choix de certains paramètres. Ces trois approches sont discutées ci-dessous.
2.3.1 Classification non-supervisée à l’aide de la rétrodiffusion (NSR)
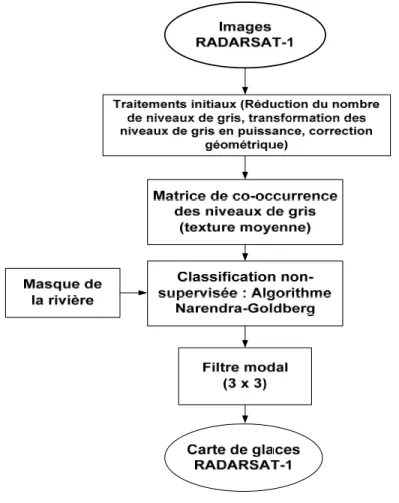
Cette méthode de classification des images radar pour la cartographie des glaces de rivières fut développée par Weber et al (2003). Les différentes étapes méthodologiques sont illustrées dans la Figure 9. Après une série de traitements initiaux appliqués à l’image pour réduire son taille, accélérer la vitesse d’analyse et transformer les valeurs d’amplitude en puissance, l’image satellite en mode fin est filtrée. En effet, en raison de leur fine résolution (8 m) qui réduit le nombre de visées du secteur à l’étude, les images RADARSAT-1 en mode fin contiennent beaucoup de chatoiement. Pour contrer ce désagrément, un filtre de Kuan (eq. 3) est d’abord utilisé, ce qui permet de conserver les contours et le format des objets (Shi et Fung, 1994). La dimension de la fenêtre est de 5 pixels par 5 pixels. La grandeur de la fenêtre peut influencer le résultat par la perte de détails si la dimension est trop grande, mais à l’inverse, si elle est trop petite, le filtre ne sera pas efficace.
Où :
R = La nouvelle valeur du niveau de gris du pixel en question;
CP = La valeur initial du niveau de gris du p ixel central dans la fenêtre de filtre; W = (1-Cu/Ci)/(1+Cu);
I = Niveau de gris moyen dans la fenêtre de filtre; Cu = 1 / NLOOK;
Ci = VAR / I;
VAR = Variance dans la fenêtre de filtre;
NLOOK = Nombre de visées (Looks) spécifique à chaque mode d’acquisition.
De plus, afin de lisser encore plus l’image pour faciliter la classification automatique (Caloz et Colet, 2001), l’emploi d’un filtre médian est ajouté à la méthode (Weber et al., 2003).
Figure 9 : Schéma des différentes étapes de classification de la méthode NSR (Source : modifié de Weber et al, 2003)
Subséquemment, l’image filtrée est classifiée sous le masque de la rivière, à l’aide de l’algorithme non-supervisé Fuzzy K-Means. Ce dernier considère d’abord toutes les valeurs de rétrodiffusion comme appartenant à tous les regroupements et associe une probabilité d’appartenance à ces classes (Caloz et Colet, 2001). Ainsi, la valeur moyenne des centres de classes varie au fur et à mesure que de nouveaux pixels sont associés à une certaine classe (Weber et al, 2003). Le nombre de classes doit être prédéterminé par l’utilisateur avant de lancer l’analyse de l’algorithme sur l’image. Weber et al. (2003) fixent ce nombre à 7, soit le nombre de types de glace observables à l’œil nu sur la rivière.
Suite au processus itératif de l’algorithme Fuzzy K-Means, tous les pixels se retrouvent classifiés. Pour permettre une meilleure uniformité spatiale du résultat thématique, un filtre modal est appliqué aux valeurs résultantes de la classification (Weber et al, 2003). 2.3.2 Classification non-supervisée à l’aide de la texture et de la
rétrodiffusion (NSTR)
Suite aux résultats dérivés des classifications effectuées à l’aide de la méthode présentée ci-précédemment (NSR), une des conclusions majeures fut que les pixels ayant de fortes valeurs de rétrodiffusion sont plus facilement discriminable par cette méthodologie de classification que les valeurs de faible rétrodiffusion. Ainsi, la majorité des pixels de basse rétrodiffusion se retrouvent dans une même classe. À partir de ce point, une nouvelle méthode de classification fut développée en intégrant la matrice de co-occurrence des niveaux-gris (texture moyenne) pour mieux distinguer les couverts de glaces ayant de faibles valeurs de rétrodiffusion (Gauthier et al., 2006).
Après la transformation des niveaux de gris en puissance, l’image entière est soumise à l’étape de la production des matrices de co-occurrence des niveaux de gris pour obtenir la texture moyenne (équation 2) sur une fenêtre 7 x 7.
Une première classification non-supervisée des valeurs de texture est ensuite effectuée à l’aide de l’algorithme Fuzzy K-Means sous le masque qui couvre la rivière à l’étude. Un
les pixels orphelins (PCI Geomatics, 2007). Suite à cette première classification, un masque spatial est effectué sur la classe ayant la valeur de texture moyenne la plus élevée. Cette classe est particulièrement sélectionnée car selon les conclusions de Weber et al (2003), les plus fortes valeurs de rétrodiffusion sont plus aisément séparables que les faibles valeurs de rétrodiffusion. Ainsi, sous ce masque spatial, la méthode NSR est appliquée intégralement sur l’image d’intensités, afin de discriminer deux nouvelles classes. Par la suite, ces deux classes vont porter l’attribut 0 pour la classe ayant la valeur moyenne de rétrodiffusion la plus faible et 1 pour la plus forte. Les deux classifications sont ensuite regroupées pour en former une seule qui rallie la texture et la rétrodiffusion (Gauthier et al. 2006). Cette opération de regroupement des deux résultats de classifications s’effectue à l’aide d’un utilitaire arithmétique qui additionne les valeurs d’attribut 0 et 1 à la valeur d’attribut initiale de la classe avec la valeur de texture moyenne la plus élevée. Finalement, un filtre modal est employé sur la classification finale regroupée. (Figure 10).
Figure 10 : Schéma des différentes étapes de classification de la méthode NSTR (Source : Gauthier et al., 2006)
2.3.3 Classification orientée-objets (OO)
La méthode de classification orientée-objets établie par El Battay (2006) est très différente des deux méthodes précédentes. Ces dernières constituent une approche qui est basée sur le niveau de gris du pixel tandis que l’OO possède une approche basée sur une connaissance approfondie des mécanismes et caractéristiques des glaces de rivière et aussi sur le contexte et le voisinage dans lequel se trouve le pixel. Celle-ci requiert initialement plus de temps et d’analyse de la part de l’utilisateur (Figure 11).
Deux grandes étapes générales forment la méthode de classification orientée-objets (eCognition professional, 2004). Premièrement, la segmentation de l’image en objets et
étapes importantes, El Battay applique quelques transformations aux images, telles la réduction du nombre de niveaux de gris, la transformation des niveaux de gris en amplitude et la correction géométrique. Les valeurs d’amplitude équivalent à la racine carrée des valeurs de rétrodiffusion radar et sont toujours positives.
La segmentation de l’image est un élément clé dans la méthode OO. Celle-ci délimite les objets constitués de pixels adjacents ayant une homogénéité au niveau de différents paramètres. Ceux-ci sont l’information spectrale des pixels, la taille, la forme, le lissage et la compacité des objets (eCognition Professional, 2004).
Postérieurement à la segmentation, la classification orientée-objets d’El Battay (2006) se base sur une hiérarchie de règles, prédéterminées par l’utilisateur, concernant les caractéristiques uniques à chacun des types/arrangements de glaces de rivière. Les objets sont classifiés selon le contexte où se trouve l’objet spatialement, selon une logique de présence d’un tel type de glace ou non (par exemple : la glace de rive ne peut se trouver au milieu de la rivière) et aussi en s’appuyant sur différentes couches d’informations géographiques (sinuosité et largeur du chenal, pente de la surface, profondeur de l’eau et présence d’îles et des rives (El Battay, 2006).
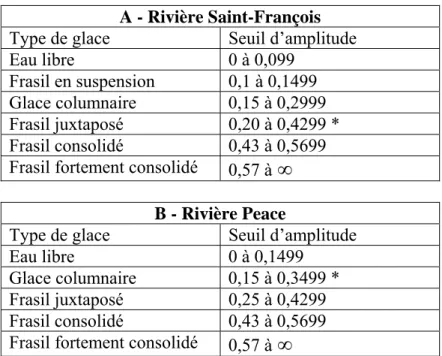
Le système de classification orientée-objets utilise un algorithme de logique floue qui permet une analyse des différentes caractéristiques d’un objet et des différentes règles préétablies, ce qui permet de classifier un objet selon une probabilité d’appartenir à une classe ou non (eCognition professional, 2004). La Figure 12 représente un organigramme des différentes règles logiques sur laquelle se base la classification. Initialement, cet organigramme de classification comporte 12 catégories de résultats. Par exemple, pour qu’un objet soit classifié glace columnaire (thermique), il doit avoir une amplitude entre 0,09 et 0,16. Par la suite, le paramètre de largeur de l’objet en question et la largeur de la rivière sont calculés et si les deux dimensions sont égales, le couvert est considéré comme complet. À l’inverse, si les largeurs ne correspondent pas et que l’objet touche à une rive, il va être considéré comme une glace de rive columnaire (thermique). Explicitement, un autre exemple de règle est pour la glace agglomérée. Pour entrer dans cette catégorie, un
objet doit avoir une amplitude entre 0,30 et 0,50. Subséquemment, si la largeur de la rivière est plus grande que l’objet, celui-ci est considéré comme glace fortement agglomérée. Au contraire, si l’objet couvre la largeur de la rivière, celui si sera considéré comme un embâcle potentiel. Deux niveaux d’embâcle sont par la suite à considérer, tout dépendamment de la profondeur moyenne à cet endroit. Ainsi, si le niveau d’eau est en moyenne plus bas que trois mètres, le risque d’embâcle est très élevé tandis que si la profondeur est élevée (> 3 m), l’objet sera classifié comme risque d’embâcle modéré.
En conclusion, les trois différentes méthodes de classification ci-précédemment expliquées sont les méthodes de base à partir desquelles les tests de validation quantitative seront effectués à l’aide d’une carte de la vérité-terrain. À l’intérieur du chapitre méthodologique, les différents changements de paramètres et d’algorithmes qui seront apportés à ces trois méthodes pour les adapter à nos données sont expliqués plus en détails.
3. Méthodologie
Pour réaliser ce projet d’étude, il est impératif de suivre une méthodologie précise et concrète qui nous permet de comparer les différentes classifications des glaces de rivière. Dans le but d’atteindre ces objectifs, le présent chapitre décrit l’approche méthodologique suivie au cours de ce travail. Premièrement, les sites d’étude et les images acquises sont exposés. Par la suite, les procédures pour obtenir la vérité-terrain et pour classifier les glaces de rivière sont expliquées. Finalement, la méthodologie pour valider les résultats obtenus est commentée.
3.1 Sites d’étude
Les sites d’études pour ce travail sont les rivières Saint-François et Peace, se trouvant respectivement dans le Sud-est (Québec) et dans le Nord-ouest (Alberta) du Canada. Ces deux rivières présentent des régimes hydriques très différents et sont soumises à des conditions climatiques permettant la formation de glace. Elles font toutes deux partie du projet FRAZIL.
La rivière Saint-François est localisée dans la province de Québec (Figure 13). Elle prend sa source dans le lac Saint-François, dans la partie sud de la région Chaudière-Appalaches, et coule sur une distance de 280 km pour terminer son périple dans le fleuve Saint-Laurent au niveau du lac Saint-Pierre. La largeur de la Saint-François est très variée, allant de 80 à plus de 850 mètres de largeur (COGESAF, 2006). Pour les fins de cette étude, le secteur étudié se trouve approximativement entre les villes de Drummondville et de Richmond, un tronçon d’environ 70 kilomètres et dont la largeur moyenne est de 260 mètres. Ce site d’étude possède des caractéristiques morphologiques très hétérogènes, passant de zones de rapides très sinueuses à des sections très calmes et non sinueuses. Cela engendre la formation de plusieurs types de glace différents. À cet égard, la rivière Saint-François est aussi très large pour certaines sections tandis qu’elle peut devenir très étroite par endroit. De plus, l’absence et la présence d’îles, pour ce tronçon d’étude, vient influencer l’écoulement et la formation du couvert de glace (El
Battay, 2006). Finalement, le débit moyen de la rivière Saint-François est de 192 m3/sec en amont de Richmond (M.E.Q., 1995) et le bassin versant de celle-ci couvre 10 298 km2 (COGESAF, 2006).
QU QUÉÉBECBEC
.
CANADA
Projection conique conforme de Lambert
Figure 13 : Localisation de la rivière Saint-François, Québec
La rivière Peace est principalement située en Alberta, mais elle prend sa source en Colombie-Britannique, dans le Lac Williston, un lac artificiel créé pour des fins hydro-électriques (figure 14). Elle s’écoule sur plus de 1300 km pour se jeter dans la rivière Slave, à quelques dizaines de kilomètres du lac Athabasca (Weber et al, 2003). Le bassin versant de la rivière couvre environ 293 000 km2, dont 183 000 km2 qui draine vers
celle-ci lorsqu’elle croise la ville de Peace River (Alberta Environment, 2006). Les photos aériennes ont été acquises à proximité de Peace River. En moyenne, le débit moyen de la rivière Peace équivaut 2 161 m3/sec en amont du lac Athabasca (Alberta Environment,
Peace River sur une distance d’environ 80 km et dont la largeur moyenne est d’environ 700 mètres. Pour ce tronçon, la rivière Peace coule dans une vallée escarpée qui se trouve à plus de 300 m. plus bas que le terrain avoisinant.
Figure 14 : Localisation de la rivière Peace, Alberta
3.2 Images utilisées
Les images utilisées ont été acquises lors des hivers 2006 et 2007 par le satellite canadien RADARSAT-1 (C – HH). Les angles d’incidence des images, tel que montré au Tableau 2, varient de 36,4○ à 43,7○. La résolution nominale des images est d’environ 8 mètres (mode fin) et celle-ci couvrent approximativement une superficie au sol de 50 km x 50 km (Agence spatiale canadienne 2006). La dimension des pixels est de 6.25 m X 6.25 m.
La lecture et le traitement initial (Figure 15) des images radar à synthèse d’ouverture (RSO) ont été effectués à l’aide du logiciel Geomatica V.10 (PCIGeomatics). Premièrement, la lecture de l’image RADARSAT-1 (en amplitude) se fait à l’aide l’utilitaire CDSAR afin d’en extraire les informations sur l’orbite et la calibration lors de l’acquisition. L’angle d’incidence est par la suite extraite (SARINCD) pour permettre une conversion des valeurs de pixels en rétrodiffusion radar à l’aide de l’utilitaire SARSIGM. Lors de cette dernière étape, les images de rétrodiffusion sont calculées en puissance. Pour accélérer le traitement des images satellitaires, ces dernières ont été transformées de 32 bits à 16 bits à l’aide ARICONST et de SCALE, ce qui réduit aussi fortement la taille des fichiers.
Figure 15 : Modèle de pré-traitement des images satellitaires conçu avec l’utilitaire Modeler dans Geomatica V.10 (PCI Geomatics) (Source : Gauthier et al, 2006)
Pour les fins de cette étude, une bonne correction géométrique a été nécessaire afin de pouvoir appliquer un masque sur la rivière et de bien superposer l’image et la vérité-terrain. Ainsi, à l’aide de nombreux points de contrôle, basés sur des vecteurs (routes, voie ferrée, lignes de transmissions, etc.) ou des images orthorectifiées, l’erreur quadratique moyenne cumulative obtenue est approximativement d’un pixel. Toutes les images ont été corrigées géométriquement à l’aide de la méthode photogrammétrique pour régler les problèmes de distorsions causées par le capteur et le relief du terrain. La projection des images pour le secteur de la Saint-François est MTM Zone 8 et de UTM Zone 11 pour le secteur de la Peace. L’outil OrthoEngine (PCI geomatics) a été utilisé pour accomplir la correction géométrique.
Tableau 2 : Images acquises en 2006 & 2007
Images RADARSAT-1 (Bande C, Polarisation HH)
Date Angle d’incidence Endroit Orbite
26 Janvier 2006 F3N (41,1○-43,7○) Rivière Saint-François, Qc Descendante 12 Février 2006 F1F (37,2○-40,3○) Rivière Saint-François, Qc Descendante 7 Février 2007 F1 (36,8○-39,9○) Rivière Saint-François, Qc Descendante 16 mars 2006 F2 (39,2○-42,1○) Rivière Peace, Ab. Ascendante
3.3 Procédure pour établir la vérité-terrain
Lorsque les images satellitaires ont été acquises pour une des deux rivières à l’étude, nous avons tenté d’obtenir le plus d’informations possible concernant le couvert de glace en place au même moment. Cette vérité-terrain sert à valider les résultats des algorithmes de classification. Ainsi, lorsque nous possédons des données de références (vérité-terrain), il est plus facile d’analyser le retour du signal radar lorsque que nous connaissons l’état de la rivière, les différents types de glace présents et leur position spatiale. Lors de cette étude, deux méthodes ont été utilisées pour établir une vérité-terrain. La première est basée sur un survol aérien (dans le cas de la rivière Peace) tandis que la deuxième est basée sur une reconnaissance au sol (dans le cas de la rivière Saint-François).
3.3.1 Survol aérien (Rivière Peace)
La vérité-terrain a été produite par nos collaborateurs de B.C. Hydro (Generation Operations) sur la base d’un survol aéroporté effectué le même jour que celui de l’acquisition de l’image RADARSAT-1, le 16 mars 2006. Au cours de ce survol, 4 photos aériennes à visée quasi perpendiculaire furent acquises à des fins de photo-interprétation. Chaque photo couvre une section d’une longueur approximative de 1 kilomètre. Elles sont localisées aux km 390 (Figure 16), 397, 411 et 486. Voir également la carte de localisation à l’annexe A.
Figure 16 : Photo aérienne orthorectifiée du couvert de glace, Km 390, Peace River, 16 mars 2006
Le géoréférence des photos fut établie à l’aide de point GPS récoltés au sol et de coordonnées extraites de fichiers d’informations géographiques dans le logiciel ER Mapper V.7 (Penner, 2006). Dans le but de pouvoir superposer les photos-aériennes
(vérité terrain) et les résultats de classification, ces photos ont été projetées en UTM Zone 11 D-04. La précision géométrique obtenue pour le km 390 est adéquate.
Pour les km 397 et km 411, en raison de problèmes de précision, l’utilisation du logiciel Microstation 8 (Version Descartes) a été nécessaire. Un procédé (warping process) permet de forcer les photos aériennes à concorder avec les points de contrôles, ce qui produit une très bonne précision à l’intérieur du polygone de ces derniers, mais qui produit une forte erreur à l’extérieur de celui-ci (Penner, 2006). De plus, l’utilisation de points de contrôle facilement détectables sur l’image RADARSAT-1 ont permis d’améliorer la superposition de ces deux photos aériennes avec l’image.
Pour le km 486, en raison de l’insuffisance de points de contrôle due à la nature de l’endroit, la photo aérienne a été écartée pour cette étude (Penner, 2006).
Subséquemment, la photo-interprétation peut être réalisée à partir des photos aériennes des kilomètres 390, 397 et 411. Selon l’expérience des spécialiste des glaces de rivière de B.C. Hydro, 7 types de glaces et l’eau libre ont été reconnaissables visuellement et délimités manuellement sur les photos aériennes pour la date du 16 mars 2006 (Penner, 2006). Ceux-ci sont les suivants :
1. Eau libre (open water);
2. Glace de rive stable (static border ice) : située à l’extérieur du chenal principal; 3. Glace de rive en mouvement (Dynamic border ice) : située à l’extérieur du
chenal principal, constitué de morceaux de glace consolidés;
4. Couvert de glace légèrement-consolidé 1 (Slightly consolidated ice, smoother) : texture de faible rugosité;
5. Couvert de glace légèrement-consolidé 2 (Slightly consolidated ice, rougher) : texture de forte rugosité;
6. Couvert de glace consolidé (Consolidated ice);