Titre:
Title
: Viscous flow and dynamic stall effects on vertical-axis wind turbines
Auteurs:
Authors
: A. Allet et Ion Paraschivoiu
Date: 1995
Type:
Article de revue / Journal articleRéférence:
Citation
:
Allet, A. & Paraschivoiu, I. (1995). Viscous flow and dynamic stall effects on vertical-axis wind turbines. International Journal of Rotating Machinery, 2(1), p. 1-14. doi:10.1155/s1023621x95000157
Document en libre accès dans PolyPublie
Open Access document in PolyPublieURL de PolyPublie:
PolyPublie URL: https://publications.polymtl.ca/3668/
Version: Version officielle de l'éditeur / Published versionRévisé par les pairs / Refereed Conditions d’utilisation:
Terms of Use: CC BY
Document publié chez l’éditeur officiel
Document issued by the official publisher
Titre de la revue:
Journal Title: International Journal of Rotating Machinery (vol. 2, no 1)
Maison d’édition:
Publisher: Hindawi
URL officiel:
Official URL: https://doi.org/10.1155/s1023621x95000157
Mention légale:
Legal notice:
Ce fichier a été téléchargé à partir de PolyPublie, le dépôt institutionnel de Polytechnique Montréal
This file has been downloaded from PolyPublie, the institutional repository of Polytechnique Montréal
Reprints available directly from thepublisher
Photocopyingpermittedbylicenseonly Gordonand BreachScience PublishersPrinted inSingaporeSA
Viscous
Flow
and
Dynamic Stall Effects
on
Vertical-Axis Wind
Turbines
A.
ALLET
and
I. PARASCHIVOIU
Departmentof Mechanical Engineering,
lcole
Polytechnique de Montr6al, C.E 6079, Succ. CentreVille, Montr6al, Qu6bec,Canada, H3C 3A7
The presentpaperdescribes a numericalmethod, aimedtosimulatetheflow field ofvertical-axiswindturbines,basedon
thesolutionof thesteady,incompressible,laminar Navier-Stokesequations in cylindricalcoordinates.The flow equations,
written in conservationlawform,arediscretized usingacontrol volumeapproachon astaggeredgrid. The effect of the spinning bladesissimulatedbydistributingatime-averagedsource terms inthering of control volumes thatlieinthepath
of turbineblades. The numerical procedureused here, based on the control volume approach, is the widely known
"SIMPLER"algorithm. Theresultingalgebraicequationsaresolvedbythe TriDiagonal MatrixAlgorithm (TDMA)inthe
r-andz-directionsand theCyclicTDMAinthe 0-direction. The indicial modelisusedtosimulatetheeffect of dynamic stallatlow tip-speedratiovalues. The viscousmodel,developedhere,isusedtopredictaerodynamic loads andperformance
for theSandia 17-m windturbine.Predictions of theviscousmodelare comparedwithboth experimental data and results from theCARDAAVaerodynamic code basedontheDouble-MultipleStreamtubeModel. Accordingtothe experimental results, the analysis of local andglobalperformancepredictionsbythe3Dviscousmodel including dynamic stall effects showsagoodimprovementwithrespecttoprevious 2D models.
KeyWords: Wind turbines; Navier-Stokes;Dynamicstall;Aerodynamics;Finitevolume
indenergyisconsideredtobeapromising
renew-able energy source,particularlyforremote areas,
likeislandsand mountainous regions. Advances in
large-scale wind energy systems, significant cost reductions,
more efficient manufacturing techniques, increasing
technical experience and the increasing environmental awareness have contributed greatly to the use of wind
energy. Althoughinvented in 1931, the Darrieusturbine
did not see extensivedevelopmentuntilthe1970s during the world wideoilcrisiswhere a considerableamountof work has been done withregard tothe aerodynamics of vertical-axis wind turbines. Aerodynamic analysis of vertical-axis wind turbines isbased on several methods
which can be classified into two major categories:
momentummodels andvortexmodels.Updatedreviews
of the state of the art of such methods, including the appropriate references areprovidedbyStrickland[1986],
Turyan
etal. [1987], and Paraschivoiu [1988].Themajorcontribution to theunsteady aerodynamics
of the Darrieus rotor is dynamic stall, which occurs at
lowtip-speedratios anditseffects haveasignificantrole
in drive-train calculation, generator sizing and overall systemdesign. Therefore, the abilitytopredict dynamic stallis of crucial importance foroptimizingtheDarrieus wind turbine. The theoretical methods of dynamic stall are still limited in their scope and prohibitively
expen-sive in term of computer CPU time. Although
Navier-Stokes solvers have been usedto simulatedynamic stall
(Shida etal. [1987], Daube etal. [1989], Tuncer etal.
[1990], and Visbal [1990]), most of the studies were
concerned with helicopterretreating-blade stall or agile
fighteraircraftand havethusconsideredpitchingairfoils
andnotthe rotationmotionencounteredbythe blades of
a Darrieus turbine. That is why our research group,
attachedto theJ.-A. BombardierAeronautical Chair, is
working on a Navier-Stokes solver able to simulate the
flow aroundanairfoil inDarrieusmotionunder dynamic stall conditions(Tclaonetal.[1993]). Ourresearchgroup
has also investigated several semi-empirical methods such as
Gormont,
MIT
and Indicial models (Allet andParaschivoiu [1988]). Forpractical reasons, the indicial model, which is one ofthe most recent semi-empirical
models, is used in this study to simulate the effects of
dynamic stall.
THREE-DIMENSIONAL
VISCOUS MODEL
Thesteady,incompressible,laminarNavier-Stokes
equa-tions in cylindrical coordinates are solved for the flow field and
Performance
characteristics of a vertical-axis windturbine. This approach was firstdeveloped for the Euler equations (Rajagopalan [1985]) and extended to Navier-Stokesequations(Rajagopalan [1986]).Theflowequations, written in conservation law form, are
dis-cretizedusingacontrolvolume approachandthe result-ing elliptic equations are solved by a line-by-line method. The numerical procedure used for solving the flow governing equationsis basedon the widely known
"SIMPLER" algorithm developed by Patankar [1980].
The turbinebladesaremodeledthroughthe sourceterms
inthemomentumequations usedtosolve the flowfield.
The essentials of this analysis are presented in the following subsections.
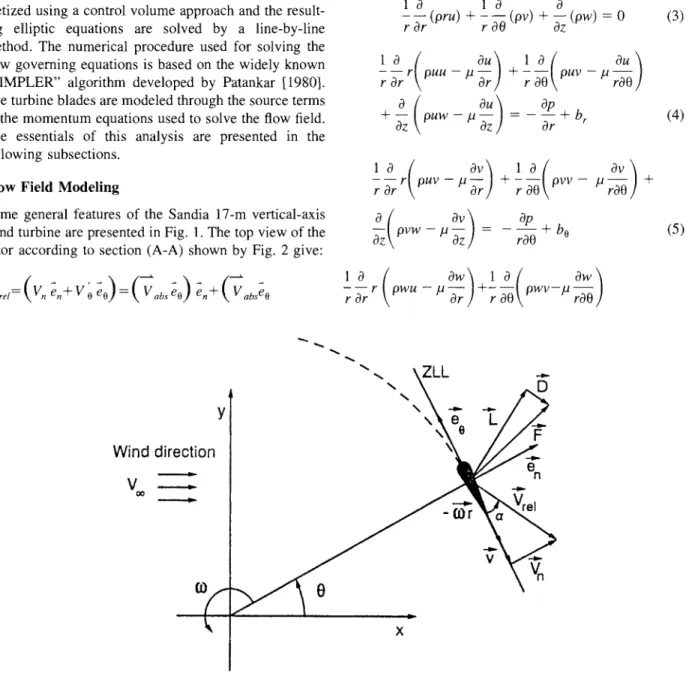
Flow FieldModeling
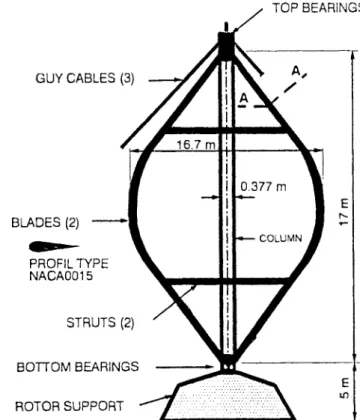
Some general features of the Sandia 17-m vertical-axis
windturbine arepresentedinFig. 1. The topviewof the
rotor according to section(A-A) shown by Fig.2 give:
0:
or)
(1)where
V
(ucos
+
wsin)V
(v-or)
(2)Since or, the linear velocity of the turbine
blade_z
isknown, theonlyunknowninthe above equationis
Vabs.
Solutionof thevelocity fieldwouldyieldtheknowledgeof all the quantities ofinterest.
Withtheassumptionsstated previously, thegoverning
equations for the flow field of a vertical-axis wind
turbine are: 10
-
10 0(pr)
+
(p)
+
(pw)
o
r Ouu-p+-
puv-rOrr-
P-O(
Ou)
Op-+-
puw lu-
bOz
Or (4) r 9UV-lU+-
9vv-+
rOr-r
r-
P-pvw l.t-z
rO0 (5) r 9wu p+-
9wv-rOr-r
r--d
Y-Wind direction
V
\x-ee
L
vo
x
TOPBEARINGS GUYCABLES
(3)
BLADES (2) PROFILTYPE NACA0015 0,377m COLUMN STRUTS(2)
BOTTOMBEARINGS ROTORSUPPORTFIGURE2 Angles,velocityvectorsand forces (sectionA-A).
+
9ww lU-Z
OZ
(6)In the simulation of the incompressible flow, the basic equations aregenerallyexpressedasthe conservation of physical values such as mass or momentum. According
to the Finite Volume Method (FVM), the governing
equationsareintegratedovereach control volume cellto
derive the discretizedequations from them.For
velocity-pressure coupledflows, astaggeredgrid systemisknown
to give more realistic solutions and is adopted in the presentanalysis.
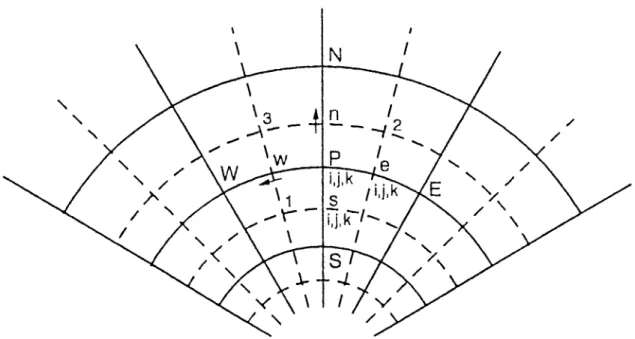
Computational Grid
The computational domain is subdivided into control
volumes by series of grid lines orthogonal to the
f’r,
0,z
coordinate directions.The size of the control volumes is decidedbasedontheaccuracy requiredintheregion.Patankar 1980] suggestedtouseastaggered gridforthe
storageof each variabletoavoid awavysolution and this
strategyisadoptedinthe presentstudy.
In
thestaggeredgrid, the velocity components are calculated for the points thatlie onthe faces of the control volumes.Thus,
ther-directionvelocity uiscalculatedatthe faces thatare
normal to the r-direction.
It
is easy to see how thelocations for thevelocity components v and w aretobe
defined. Typical cells for each variable (u, v, w, p) are
shown onFigures 3 and 4.
TurbineModeling
The motion of vertical-axis wind turbine blades
intro-ducesprimarily a changein the localmomentumof the fluiddue to theforces generated by the rotating blades.
Thus, an obvious place to introduce the action of the
blades in the governing equations of the flow field is
through the source terms in the momentum equations,
namely
Sr,
So
andSz.
These sourcetermsare validonlyfor the computational cells that lie in the path of the turbine blades. Following the detailed procedure illus-trated by Allet [1993], only the final form of the time-averaged sourceterms is given here:
S
WCOS(CDUCOS
CLV
+
Czwsin)
(7)S
W(CDV
+
CLV
CDtOr
(8)W
e
\1/
FIGURE3 Staggeredgrid(2-Dview).
p
cell
3v cell
3N
u
cell
w cell
These are forces feltby the blades perunit ofspan, and
are thus subtracted in the discretized momentum
equa-tions toeffectanequalbutoppositereaction onthe fluid
at a specificcell.
DYNAMIC STALL
ANALYSIS
Dynamic stall is an unsteady flow phenomenon which
referstothe stalling behavior of anairfoilwhentheangle
of attack is changing with time.
It
is characterized bydynamic delayofstalltoangles significantly beyondthe
static stall angle and by massive recirculating regions moving downstream over the airfoil surface. Inthe case oftheDarrieusturbine, when theoperationalwindspeed
approaches itsmaximum, all blades sections exceed the
staticstallangle,theangleof attackchanges rapidly,and the whole blade works indynamicstall conditions.This
phenomenon maycausestructural fatigue, and even stall
flutter leading to catastrophic failure, and thus can
become, inmanycases, theprimarylimiting factor in the
performance and structure ofthe turbine. Therefore, in
orderto predict the aerodynamic performances of such
structures and provide aerodynamic loading information
tostructural dynamic codes, anumerical modelmustbe able to capture the complex aerodynamics encountered
by a vertical-axis rotor blade, andmore particularly the
dynamic stall phenomenon.
To provide some representation of dynamic stall
effects,thereareseveral methodswhich canbe classified
in two categories: the theoretical and semi-empirical
methods. Theoreticalmethods are attractive andaccurate
in studying local insight of the dynamic stall
phenom-enon (boundary layer evolution, pressure distribution)
evenifthe required computational resources are
prohibi-tive. Howeverfor practical cases, semi-empirical meth-odsare stillusedtosimulatedynamicstalleffects within engineeringaccuracy.
A
generalreview of somedynamicstall prediction models is providedby Reddy and Kaza [1987].
IndicialModel
Themethodology ofsemi-empirical models often relies
onthe reduction and resynthesis ofaerodynamictestdata
from unsteady airfoil tests.
In
the interest ofcomputa-tional simplicity, some modelssacrificephysicalrealism and so may have limited generality in theirapplication.
The aim of this section is to introduce the indicial method used in our aerodynamic analysis to simulate dynamic stall. This model, originally developed by
Beddoes 1983, 1984] intheearly80’ s, has continuedto
improvesince then(BeddoesandLeishman[1989]).The
theoretical approach of the indicial method is quite
different from the other methods. The indicialmethodis
basedonthe fact thatdynamicstall is asuperpositionof distinct effects that may be studied separately by using indicialfunction(responseofasystemto adisturbance).
These effectsconsistsof three distinct parts: Potentialflow solution (linearsolution);
Separated flow solution for the non-linear airloads;
Deep
stall solution forvortex induced airloads.This modelis thenrepresented by a relatively simple
set of equations and, most importantly, allows closer
identification ofthe interacting phenomena involved in
dynamic stall.
Potential
flow
calculation.Any
unsteadyaerody-namic model must be able to represent correctly the attached flow behavior. This flow induces two
aerody-namic components. The firstcomponent is acirculatory one
(CNc)
due to thechange in the angleof attack and has alagbehavior.Cuc(t
CIa
Ecosoe (10)whereeE, the effective angleofattackis definedby:
with
OE--"On_
+
0 (t) (11)c(t)
Ao-A
exp(-blS’
-A2exp(-b2s’
(12)Theconstantsof
Eq.
(12)aredeterminedonthe basis of theoretical considerations andoptimization tofitexperi-mental results (Beddoes [1984]), so the constants are given as
A
o 1.0,A
0.3,A
2 0.7,bl
0.35 and b20.68.
The second aerodynamic response is an impulsive
componentresulting fromaninducedvelocity normalto
the airfoilsurfacegenerated bythe airfoilmovementand
is given by: where
(4(t)AoO
CNI(
(13) Mel(t)
exp (14)The normal force coefficient
CN
resulting frompotential flow is obtainedby asimple summation:CN(t
CNc(t
+ CNI(t
(15)Thetangentialforce coefficient is givenby:
CT(t
CLa12
Esin12e(16)
Non-linear
effects.
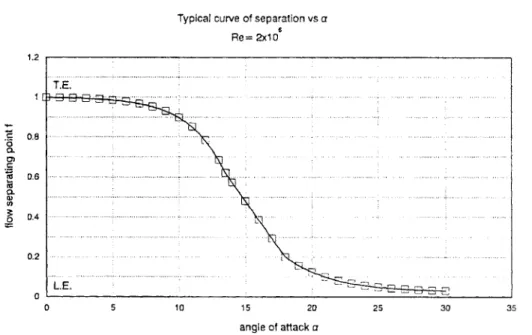
Theunsteadynon-lineareffects are simulated through empirical correlations. Leading edgeand trailing edge separations must be predicted with
accuracy because oftheirgreat influenceon the
aerody-namiccoefficients.Tomodeltrailingedge separation,the
position of the separation point f is required. This
positionwillbe corrected later forunsteady cases.
f=
0.38exp(12
12)/S
12<-12
(17)f=
0.62+
0.38(12
12)S
(exp(-1/S)- 1)
121<12
<--
t22(18)
f=
0.025+
0.175exp(122
c)/S
2 12>c2 (19)A
typicalcurve of theseparation pointfvs.theangleofattack12isshown inFig.5. Theparameters121,o2,
S,
$2,$3 arefound from the curve-fitting of the static lift and
drag curves. The non-linear value of the normal force coefficient is determinedby"
CN
N-L+
f0.5)2
Cu
C (20)For unsteadyflows, temporaleffects influence the
posi-tion of the separation point. Two first order lags are therefore introduced to take these effects into account.
The first function simulates the airfoilunsteadypressure response.
C
N,+p(t)
CNN_
L(21)
whereqbp
(t)
1-expcTp
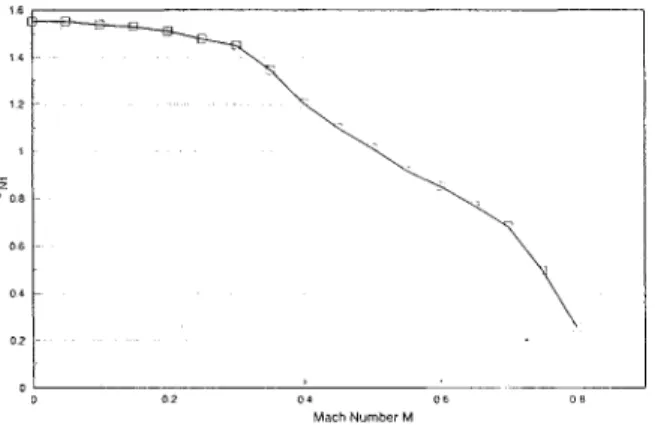
(22)The onset of leading edge separation is related to the following criterion:
CN,
>CN1
withCN1
beingthe critical normal force coefficient illustrated in Fig. 6.A
secondlinear lag function is introduced to simulate additional effects of the unsteady boundary layer response:
CNF,
dPF(t
CN,(23)
where
(
,--2Vt
+F
(t)
1--expCTF
]
(24)
A
new angleof attack, 12F is defined from the value ofCNF,"
CNF’
(25)12F--
CLot
1.2
Typical curveof separationvs z
06
Re 2xl
10 15 20 25 30
angleofattack(]
FIGURE5 Typicalcurveof the position of the flowseparation pointfunction ofo.
4Mach
FIGURE 6 Critical normal force coefficient(CN1) for theonset of
leadingedgeseparationfunctionof the Mach number.
Thisangleisusedinsteadofotin
Eqs.
17-19tocomputetheposition of the unsteady separation.
Deep
dynamic stall. Formost dynamic stall cases, a vortex appears nearthe leading edge and movesdown-stream on the upper surface of the airfoil. Until the detachment of thevortex, it seemsthereis nosignificant
change in the airfoil pressure distribution. Thus, the
inducedvortex liftcontributionisequaltothe loss of lift
due to the separation (Fig. 7)
where
Cv
CNC
(1 -K)
(26)K
(1
+f0.
)2
(27)4
From experimental observation, ithas been proven that
the reattachment of the unsteady flow occurs later relatively tothesteadycase. Thisdelayisintroducedby
angleofattack
FIGURE7 Dynamic stallvortex contribution.
replacing o from eqs. 17-19 by a modified angle
o
givenby:
(28)
RESULTS
AND
DISCUSSION
This section presents a selection of results obtained by
both the three-dimensional viscous model developed
previously and theCARDAAVcode basedonstreamtube
theory.Thecorrespondingresultsarecomparedwiththe
experimental data on the Sandia 17-m wind turbine
configuration provided by Akins [1989]. The dynamic
stall is simulated bythe indicial model for both
aerody-namiccodes. First,tovalidatetheviscouscode, prelimi-narytests dealing with the determination of the
compu-tationalgridandtheconvergenceof the numerical model
are presented.
Computational Mesh and
Convergence
Considerations
Tovalidate this solver, preliminary results forvalidating
thecomputational procedurearepresented.Thus, for the
windturbineproblem, it was necessary to firstestablish thesizeof thecomputationaldomain whichisreferredto asthe worldsize.Thedomainwas consideredtobelarge
or accurate enough when the power coefficient reached
anasymptoticvalue.Thisexercisewascarriedoutonthe
Sandia 17-m wind turbine rotating at 42.2rpm and a
tip-speedratio
Xeq
6.12.Thisvaluewasused instead of otherexperimentalvaluestoavoid the effects ofdynamicstallphenomenaon thecomputedresults.
As
shown inFig. 8, thepowercoefficientCp
reacheditsasymptoticvalueat aworldsize of about
60Req.
Thesameexercisewascarriedoutforthe0-gridsizewhichis
illustratedbyFig. 9. Accordingtothisfigure,a minimum
of 40pointsareneededtogeta sufficientcomputational
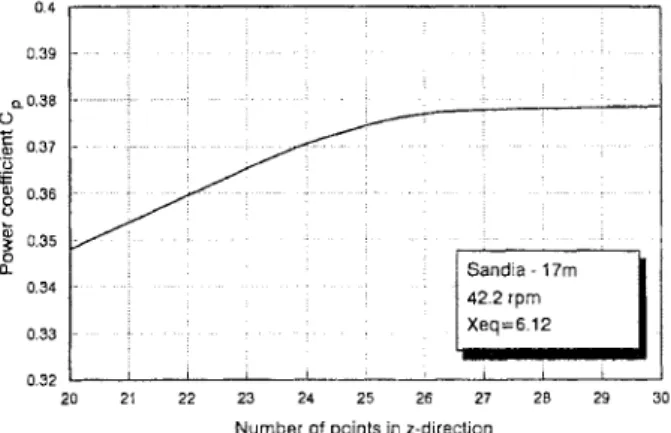
grid in the 0-direction.Forthe z-direction, Fig. 10 shows that 26 points at least were necessary to getan
asymp-totic value of
Cp.
Thus, for all the following computa-tions, the fineness of the gridwas maintained at(66
48 26) points. Alastfeature about Fig. 10isthatatthe
end of theoptimizationexercise, the calculated value of
the power coefficient
Cp
is almost equal to thecorre-sponding experimentalvalue
(Cp(exp)
0.387).A
conver-gence history of
Cp
with the number of iterations ispresentedinFig. 11 for the same conditions used in the
determination of the grid size.As seen in this figure, a
0.4 0.39 L)
"
0.38 0.37o
0.36 0.35 0.34 Sandia-17m
42.2rpm | FIGURE 8 20 40 60 80 100Worldsizein diameters
Effect of worldsize in r-directiononpowercoefficient.
and even before that.
In
general, the calculations were taken to250iterations toassuretheconvergence behav-ior of the computed solution for different operationalregimes of the Darrieus wind turbine. Following this
optimization exercise, the resulting computational mesh
(66 48 26) usedbytheviscoussolveris shownby
Fig. 12.
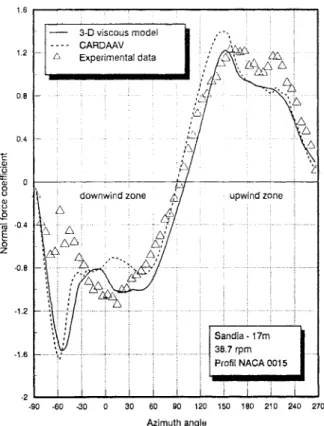
LocalAerodynamic Coefficients
The distribution oflocal normal force coefficient CN at
the equator levelis plotted asa function of the azimuth
angle to for values oftip-speedratio
Xeq
varying from2.33to4.60.fortheSandia 17-mwind turbinerotatingat
38.7rpm according to the experimental data (see Figs.
13-15). Figure 13 shows that theviscous model
repre-sentsquiteaccuratelythe distribution ofthe normalforce
coefficientfor almost all azimuthanglevalues.
However,
near 0 -60 deg. in the downwind zone, predictions
aredifferent fromexperimental data.Akins 1989],in his
experimentaldata analysis, hascomparedthe
experimen-tal data to values predicted by a vortex model coupled
withGormont model(as dynamic stall model) as
modi-fied by Mass6 [1981]. Akins concluded in his analysis
0.4 0.39 0.34 42.2rpm 0.33 Xeq=6.12 0.32 20 21 22 23 24 25 26 27 28 29 30 0.38 0.37 0.36 0.35
Number of points inz-direction
FIGURE10 Effect of gridpointsinz-direction onpowercoefficient.
thatthe wake interaction in thedownwind zone doesn’t allow the establishment ofdynamic stall.
However
this effect is not predicted by the vortex model (used byAkins in his analysis) nor by the viscous model. In
general, values predicted by CARDAAV code are in
good agreement with experimental data even if the
maximum value in the upwind partis slightly overesti-mated. With increasing tip-speedratio
(Xeq
3.09 and4.60), this feature (wake interaction) tends to disappear
and the values predictedbyboth modelsagree quitewell with the corresponding experimental data.
This firstcomparison of the normal force coefficient
tendstodemonstrateacertain superiority of the indicial modelas adynamic stall model whencomparedtoother semi-empirical models (Gormont model for instance). Thus, CARDAAV code coupled with Gormont model
predicted a maximum value of
CN
in the upwind partmuch greater than thecorresponding experimentalvalue
CNmax
1.6 (Allet and Paraschivoiu [1988]). To bettervisualize the dynamic stall phenomenacharacterizedby
anhysteresislooponnormal force coefficient
Cy
curvesvs. angle of attack o, Fig. 16 presents the variation of
0.45 0.4
0.35
0.25
20 25 30 35 40 45 50 55 60
Number of pointsinG-direction
FIGURE 9 Effect of grid points in 0-directiononpowercoefficient.
0.8 0,4 42.2rpm 0.2 50 100 150 200 250 300 Number of iterations
(a) (b)
FIGURE 12 Computational meshatthe equator in and 0 directions.
normal force coefficient vs the angle of attack for a
tip-speed ratio
Xeq
2.49 predictedbybothmodels. This figure shows that for both models dynamic stall doesexist in the upwind part (hysteresis loop) and that the reattachment of the boundary layer does happen at the
same time forboth models.
The values of local tangential force coefficient
Cw
predictedby both aerodynamic codes are presentedasa functionofthe azimuthanglein Figs.(17-19).Generallyspeaking, the viscous code reproduces quite well the
1.6 1.2 0.8 0.4
"-
-0.4 E Z -0.8 3-Dviscousmodel CARDAAV Experimental data IIII downwindzone -1.2 -1.6 -2 -90 -60 -30 30 upwind zone Sandia 17m 38.7rpm ProfilNACA0015 60 90 120 150 180 210 240 270 AzimuthangleFIGURE 13 Normal forcecoefficient vs. azimuthangleat38.7rpm
andXeq=2.33.
3-Dviscousmodel
CARDAAV Experimentaldata
downwindzone upwind zone
Sandia 17m 38.7rpm
ProfilNACA0015
30 60 90 120 150 180 210 240 270
Azimuthangle
FIGURE 14 Normal forcecoefficient vs. azimuthangleat38.7rpm
andXeq 3.09.
experimentalvalues of the tangential force coefficient
Cw
except near0 30 deg. in the upwind zone where the
predictedvalues areslightlyoverestimated.Theonsetof
dynamic stall tends to give a kind of irregularityto the
curves of the tangential force coefficient which tends to
disappear with increasing tip-speed ratio (Figs. 18 and
19). CARDAAV predictionsof
Ca-
areingeneralingoodagreement with experimental data, though the part de-finedby 150 deg. < 0 deg. inthe upwindzonepresents
predictions completelydifferent from the corresponding
experimental data. Moreover, for almost all cases
pre-sented, this model overestimates the maximum value of
thetangentialforcecoefficientin theupwindand
down-windzones of the Darrieus windturbine.
Global Performance
Theevaluationof thepowercoefficient
Cp
wascomputedon the Sandia 17-m wind turbine operating at 42.2 and
50.6rpm. Evenif theeffect ofdynamicstallis notreally
visibleonpowercoefficientcurves, however thiskindof curves allows one to have a better idea about the
1.2 0.8 0.4 -0.4 -0.8 -1.2 3-Dviscousmodel
/
,--,,Experimentaldata
I
.5 CARDVi
’’"’""’’
’/
x.er,e,a,.a,a!.
o.",i,
Jownwindzone!
/
upwindll
izone
.7rpI
ProfilNACA0015
-90 -60 -30 30 60 90 120 150 180 210 240 270
Azimuthangle
upwind zone
FIGURE15 Normal forcecoefficient vs. azimuthangleat38.7rpm
andXeq 4.60. Z-0.5 -1.5 downwindzone 17m 38.7rpm ProfilNACA0015 -2 -30 .24 .18 .12 .6 12 18 24 30 Angleofattack
FIGURE16 Normalforcecoefficient vs.angleofattackat38.7rpm
andXeq 2.49.
powercurvesdealwithgreaterwindvelocities. Predicted and experimental values of thepower coefficient
Cp
vs.tip speed ratio
Xeq
arecomparedin Figs. 20 and 21. Inthe dynamic stallzone(1 <
Xeq
<4), both models seemto reproduce quite accurately this zone however in the
transition zone(4<
Xeq
<6),both modelsunderestimatethe maximum value of the power coefficient. For the unstalledregion,it isobviousthat the viscous codeoffers betterpredictions than CARDAAV code.Figure21 was
reproducedmainly from the reference of
Touryan
etal.[1987] for a rotational speed of 50.6rpm. This figure
offers a more interesting comparison between several aerodynamic models and the viscous code. These aero-dynamic codes are: double-multiple streamtube model
(CARDAAV, CARDAAX)of Paraschivoiu [1988], the
model basedon vortextheory (VDART3) developed by
Strickland [1979] and the modelbasedon local
circula-tiontheory (MCL) developedbyMass6[1986].First, we
have to notice that this figure shows results of two versions ofthe CARDAAV code: oneusing the indicial model and the other using
Gormont
model as dynamicstallmodel.
Moreover,
the secondversionofCARDAAVtakes intoaccountsecondaryeffects whichareimportant
at high tip-speedratio values. Consequently, differences are noticedbetween predicted results of bothversionsof
CARDAAV.
In
the dynamic stall regime(Xeq
< 4), thecoupling CARDAAV/Indicial code seems to give better
results than CARDAAV/Gormont code. According to
experimental data, the viscous model provides a good
representation ofthe power coefficient in all ranges of
tip-speedratio
Xeq
evenifthe Local Circulationmethodseems to bethe best model that reproduces quite
accu-rately the distribution of theperformance coefficient CP
in almost alloperational ranges of
Xeq.
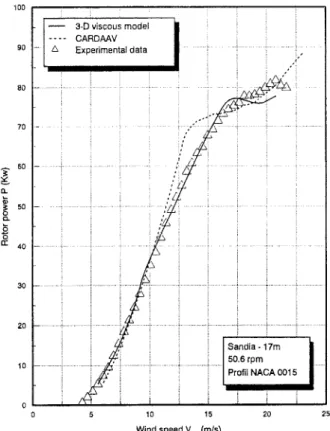
The dynamic stall phenomenon is clearly visible on
thepowercurvescharacterizedbyaplateauathighspeed
(Figs. 22 and
23).
Comparison of rotor power values predicted by both models and experimental data ispresentedinFigures 22 and 23. Forlow wind velocities
(Veq
< 10m/s), both models seem to give a goodapproximationof the experimental values ofrotorpower,
thoughin thedynamic stall regime
(Veq
> 12.5m/s),theCARDAAV code using the indicial model does not
predictanalmostconstantvalue andkeepsonincreasing.
The viscous model predicts a plateau close to the
3-Dviscous model Sandia-17m CARDAAV 38.7rpm
,
Experimentadata ProfilNACA00153-D viscousmodel
/
Sandia 17mCARDAAV
I
38.7rpmA Experimentaldata ProfilNACA0015
0.4 -..7;;i
.90 -60 -30 30 60 90 120 150 180, 210 240 270
AzimuthAngle
FIGURE 17 Tangential forcecoefficient vs. azimuth angle at 38.7
rpm andXeq 2.33. 0.5 CARDAAV 38.7rpm /k Experimentaldata ProfilNACA0015 3l A
:
i’ ;.>;:;
-90 -60 -30 30 60 90 120 150 180 210 240 270 AzimuthangleFIGURE 18 Tangential force coefficient vs. azimuth angle at 38.7
rpm andXeq 3.09.
-90 -60 -30 30 60 90 120 150 180 210 240 270
Azimuthangle
FIGURE 19 Tangential force coefficient vs. azimuth angleat 38.7
rpmandXq 3.70. 3-D viscous model CARDAAV
I
L ExperimentaldataI
) 0.3 .u_ 0,1 10 Tip-speedratioXqFIGURE20 Powercoefficientvs.tip-speedratioforSandia-17m at
PARASCHIVOIU 0 0.3
._
0.2Sadia-
17m 50.6rpmI
ProfilNACA0015I
..."/ .m 3-D viscousmodel CARDAAV/INDICIAL CARDAAV/GORMONT CARDAAX VDART3 MCL / Experimentaldata 10 Tip-speedratioXeqFIGURE 21 Powercoefficient vs.tip-speedratioforSandia-17m at
50.6 rpm. 6O I:E 40 lO0 CARDAAV 90 /k 3-Dviscousmodel Experimentaldata Sandia 17m 50.6rpm ProfilNACA0015 lO 15 20 25
Windspeed
Veq
(m/s)FIGURE23 Rotor powervs.windspeedforSandia17mat50.6 rpm.
3-D viscousmodel
i
CARDAAV /x Experimentaldata 60 /.""
/,,, o 20’"i
Sandia-Tm .2rpm,,’
ProfilNACA00151
10 15 20 25 Windspeed Veq(m/s)FIGURE22 Rotorpowervs.windspeedforSandia17mat42.2rpm.
However,
for a rotational speed of 50.6 rpm, Fig. 23 shows that predicted values of the powerareunderesti-mated in thedynamicstallregimeeveniftheplateaustill exists.
CONCLUSION
The main objective of this study was todevelop a new
computational procedure to analyze the global
perfor-mance and blade loads of vertical-axis wind turbines. This has been accomplished with a numerical solver based on the solution of the steady, incompressible,
laminar Navier-Stokes equations using Finite Vol-ume Method (FVM). Dynamic stall effects were
simu-lated by an indicial model (as dynamic stall model)
which tackles this problem at a more physical level of approximation but still in asufficiently simple manner.
Analysis of the computed results presented in the
previoussection has demonstrated certainsuccessof the
viscous solvercoupledwiththe indicial model regarding
its ability toaccuratelypredict the aerodynamic
support the factthat, among othersemi-empirical
mod-els, the indicial model offers the best representation of dynamic stall for theprediction ofwindturbine
perfor-mance.
As
afollow-up, considerableimprovementcould alsobe achieved for future predictions.
For
instance thisnumericalsolver could be easily extendedtoincludethe turbulentnatureof thewindbyusing a stochastic model
(see reference ofBrahimi and Paraschivoiu
[1992]).
Nomenclature c
c,
CNCT
f n,O,s N P r,O,Z R Req S S,So,S
TSR,
V,W bladechord,mdragcoefficientof bladeairfoil section lift coefficientof bladeairfoilsection liftstaticcurveslope
normalforce coefficient of blade airfoil section power coefficient of theturbine
tangential force coefficient of blade airfoil
section
flowseparationpoint(%c)
bladelength,m
Mach number
coordinatesystem attachedtothe blade numberofblades
staticpressure, Pa
cylindricalcoordinatesystemattached’tothe blade
rotorradius at acertainlevel,m rotor radius atthe equator, m nondimensionaltime(t(1-M2)2V/c) rotorswept area, m
source termsin themomentumequations
time,
Tip-SpeedRatio(toReq/U)
velocity componentsinther,to,zdirections,
m/s
absolutevelocityofthe wind,m/s
component ofVab.in then-direction,rn/s relativevelocity,rn/s
freestream wind velocity,m/s
time averaging factor(NCpVrelA0/4’rr)
tipspeedratio atthe equator(toReq/U)
local angle of attack, deg.
staticstall angle,deg.
local normalangle, deg.
dynamic stall reattachment factor,deg.
azimuthalangle,deg.
dynamicviscosity,Pa.s
cinematic viscosity,m2/s
density,Kg/m
rotorsolidity(NcL/S)
indicial function
rotorrotationalspeed,
s-Superscriptsand Subscripts
CIR,C circulatorycomponent
IMP,I impulsivecomponent
N-L non-linearcomponent
n-1 previoustimevalues
V vortexcomponent
eq equatorial values
freestream conditions
References
Akins,R.E., 1989.Measurementsof SurfacePressureon anOperating Vertical-Axis WindTurbine,ContractorReportSAND89-7051,
San-dia NationalLaboratories,Albuquerque,NewMexico87185. Allet, A. and Paraschivoiu, I., 1988. Aerodynamic Analysis of the
Darrieus Wind Turbines Including Dynamic-Stall Effects, AIAA
JournalofPropulsion andPower,Vol.4,no.5, pp. 472-477. Allet,A., 1993. Mod61e visqueuxtridimensionnelpour le calcul des
turbines axe vertical,Thgsededoctorat, D6partementdeG6enie
M6canique,lcolePolytechnique de Montr6al.
Beddoes,T.S.,1983. Representation ofAirfoilBehaviour,Vertica,Vol. 7,no.9, pp. 183-197.
Beddoes,T.S., 1984. PracticalComputationofUnsteadyLift, Vertica,
Vol.8,no. 1,pp.55-71.
Beddoes,T.S.,andLeishman,J.G.,1989.ASemi-Empirical Model for Dynamic Stall, JournaloftheAmericanHelicopter Society, Vol. 34,
no.3, pp. 3-17.
Brahimi,M.T., and Paraschivoiu, I., 1992. Stochastic Aerodynamic Model for StudyingDarrieus Rotorin TurbulentWind, The Third
International SymposiumonTransportPhenomena and Dynamicsof Rotating Machinery,(ISROMAC-3),Hemisphere Publishing
Corpo-ration,pp. 463-477.
Daube, O., TaPhuoc,L.,Dulieu,A., Coutanceau, M., Ohmi,K.and Textier,A., 1989.Numerical SimulationandHydrodynamic
Visual-izationof TransientViscousFlow Around and OscillatingAerofoil,
International JournalforNumericalMethods in Fluids,Vol. 9, pp. 891-920.
Mass6,B., 1981. Description de deauxprogrammesd’ordinateurpour
lecalcul de performancesetdes charges a6rodynamiquespour les 6oliennesaaxevertical,RapportIREQ-2379,InstitutdeRecherche
d’hydro-Qu6bec, Varennes,Canada.
Mass6,B.,1986.ALocal CirculationModel forDarrieusVertical-Axis
WindTurbine,JournalofPropulsion andPower,Vol. 2,no.2,pp.
135-141.
Paraschivoiu,I., 1988. Double-Multiple Streamtube Model for
Study-ing Vertical-AxisWindTurbines, AIAAJournalofPropulsion and
Power,Vol.4,no.4,pp.370-378.
Patankar,S.V., 1980.NumericalHeatTransferandFluidFlow,New
York: HemispherePublishingCorp.,McGraw-Hill.
Rajagopalan, R.G., 1985. Finite Difference Model forVertical-Axis
WindTurbine,JournalofPropulsion andPower,Vol. 1,no.6,pp.
432-436.
Rajagopalan, R.G., 1986. ViscousFlow FieldAnalysis ofa
Vertical-Axis Wind Turbine, Proceedings ofthe 2P’ lntersociety Energy
Conversion Engineering Conference, San Diego, Vol. 2, pp. 1242-1247.
Reddy, T.S.R.,andKaza,K.R.V.,1987.A Comparative StudyofSome
Dynamic Stall Models,NASATM-88917.
Shida,Y.,Kuwahara,K., Ono, K.,andTakami,H.,1987. Computation of Dynamic Stall ofaNACA-0012 Airfoil,AIAAJournal, Vol. 25,no.
3,pp.408-4 13.
Strickland,J.H.,Webster,B.T.,andNguyen,T.,1979.A VortexModel of the Darrieus Turbine: An Analytical and Experimental Study, JournalofFluids Engineering, Vol. 101,pp.500-505.
Strickland,J.H.,1986.AReview ofAerodynamic Analysis Method for Vertical-Axis Wind Turbines, Proceeding ofthe 5’h ASME Wind
Tchon,K.-E,Allet,A.,andHall6,S.,1993. Dynamic StallSimulation
foraRotating Blade, ProceedingsoftheFirstBombardier
Interna-tionalWorkshop,Montr6al, Canada,pp.440-443.
Tuncer, I.H., Wu, J.C., and Wang, C.M., 1990. Theoretical and
Numerical Studiesof OscillatingAirfoils,AIAAJournal, Vol.28,no.
9,pp. 1615-1624.
Turyan,K.J., Strickland, J.H.,andBerg, D.E., 1987. ElectricPower
fromVertical-Axis Wind Turbines,A1AA JournalofPropulsion and
Power,Vol.3,no.6, pp. 481-493.
Visbal,M.R.,1990. Dynamic Stall ofaConstant-RatePitching Airfoil,
Internatfional Journal of
A
e
ro
spa
c
e
Eng
fin
e
e
r
fing
Hfindawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2010
Robo
Journal ot
fics
fH findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014
H findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014
Actfive and Passfive
Electronfic Components
Control Scfience and Engfineerfing
Journal of
H findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014 H
findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014 H
findawfi Publfishfing Corporatfion http://www.hfindawfi.com
Journal of
En
g
fin
e
er
fin
g
Volume 2014
Subm
fi
t
your
manuscr
fip
ts
a
t
h
t
tp
:
/
/www
.h
findaw
fi
.com
VLSI Desfign
Hfindawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014
H findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014
Shock and Vfibratfion
H findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014
C
Advancesfiv
fi
l
Eng
finfinee
r
fing
AcousAdvancestficsfin and Vfibratfion
H findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014 H
findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014
Electrfical and Computer Engfineerfing
Journal of
Advancesfin
OptoElectronfics
Hfindawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014
The
Sc
fient
fific
Wor
ld
Journa
l
H findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014
Senso
JouHfindawfi Publrnafishfing Corporatl ofionfrs
http://www.hfindawfi.com Volume 2014
Modellfing & Sfimulatfion fin Engfineerfing
Hfindawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014 H
findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014
Chemfical Engfineerfing
InternatfionalJournal of Antennas and Propagatfion InternatfionalJournal of
H findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014 H findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014
Navfigatfion and Observatfion InternatfionalJournal of
H findawfi Publfishfing Corporatfion
http://www.hfindawfi.com Volume 2014
Dfistrfibuted
Sensor Networks