On the synchronization and desynchronization of dynamical systems. Applications
Texte intégral
Figure
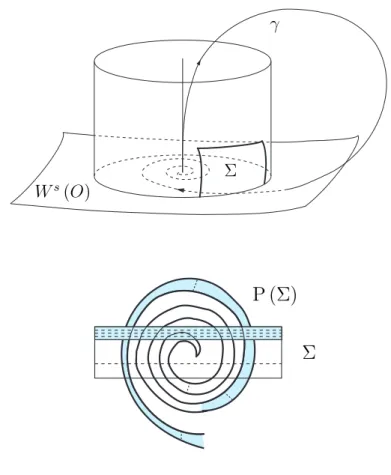
![Figure 3: Flot du mod`ele g´eom´etrique de Lorenz (figure tir´ee de [Via00])](https://thumb-eu.123doks.com/thumbv2/123doknet/12930215.374028/13.918.274.639.307.535/figure-flot-ele-eom-etrique-lorenz-figure-via.webp)
Documents relatifs
Cependant, p n’est pas l’un des nombres premiers inf´ erieurs ou ´ egaux ` a j max car sinon p serait un diviseur de n plus , du produit #j max , et donc aussi de leur diff´ erence
The cosphere bundle projection to the base manifold descends to a continuous surjective map from the reduced space at zero to the orbit quotient of the configuration space, but it
The function f is finite time self-synchronizing if and only if, there exists an integer i large enough so that for any finite sequence (y) of length i + 1, the iterated function φ
Tatouage hi´ erarchique d’un message hi´ erarchis´ e S´ election des supports d’insertion.
Abstract: A max-plus system with partial synchronization is a persistent discrete event system divided into a main subsystem and a secondary subsystem where some events in the
We study the properties of finite, semi-finite, properly infinite, purely infinite, discrete, continuous, type ..., I,, III, 1100’ III systems.. We also introduce
Les brebis inséminées manifestent de bonnes performances de prolificité, de productivité numérique et pondérale, par contre leurs taux de fertilité et fécondité sont
Let us note that various results similar to Theorem B were established earlier in the case of deterministic PDE’s; e.g., see the papers [FGMZ04, EMZ05], the first of which is devoted
